
Если использовать разности высших порядков вплоть до n-го, то разностное уравнение 1
| Вид материала | Документы |
- Частные производные и дифференциалы высших порядков п. Частные производные высших порядков, 190.6kb.
- Статья Тема: «Уравнения высших степеней с параметрами», 55.64kb.
- § Тема. Некоторые определения и обозначения, 1005.59kb.
- Статьи на русском, 122.97kb.
- Решение кубического уравнение в общем виде. От общего кубического уравнения к упрощённому, 14.77kb.
- У (к = 1,2,…). Однако на практике часто выгоднее выражать значения производных не через, 96.45kb.
- Содержание уравнения математической физики (нм-3) Уравнения математической физики (нп-3), 92.05kb.
- Определители 2-го и 3-го порядков: определения и применение к решению систем линейных, 42kb.
- Диффузия в биологических системах. Диффузия, 145.79kb.
- Методические рекомендации студентам, 215.81kb.
Если использовать разности высших порядков вплоть до n-го, то разностное уравнение (1.1) можно представить в виде, аналогичном дифференциальному уравнению:

Описанные способы аппроксимации дифференциальных уравнений разностными дают удовлетворительные результаты только в тех случаях, когда период квантования t0 мал по сравнению с наименьшей постоянной времени объекта. В системах управления промышленными технологическими объектами это условие обычно выполняется вследствие большой инерционности объектов и высокого быстродействия современных управляющих вычислительных машин, позволяющих реализовать опрос всех контуров регулирования с малым периодом.
Применение средств вычислительной техники для управления значительно расширило возможности реализации различных законов управления и регулирования, структура и параметры которых определяются в результате оптимизации системы управления. Однако наиболее распространены в системах непосредственного цифрового управления алгоритмы, разработанные как аналоги непрерывного ПИД-регулятора. Это позволяет использовать накопленный опыт работы с аналоговыми регуляторами и применять хорошо известные правила выбора параметров.
Простейший способ получения алгоритма управления по ПИД-закону состоит в переходе от интегро-дифференциального уравнения непрерывного регулятора к разностному уравнению (в соответствии с изложенными выше правилами).
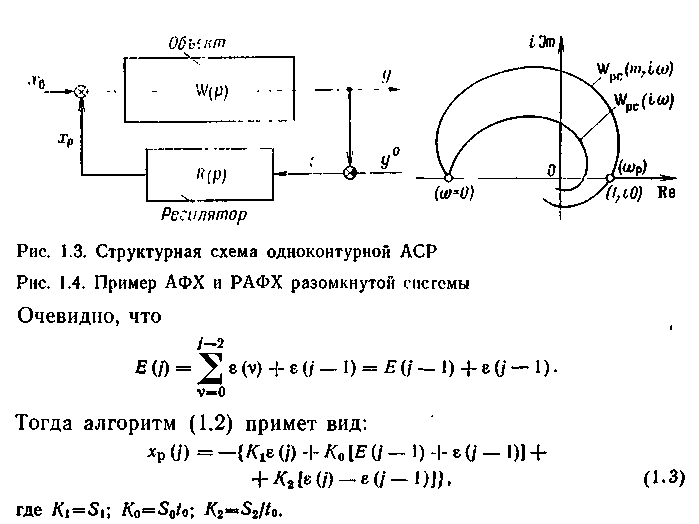
Если уравнение ПИД-регулятора записать в виде (рис. 1.3)

то при интегрировании по методу прямоугольников для периода квантования /о получим разностное уравнение

Полученный алгоритм, называемый позиционным, неудобен для реализации в УВМ, так как для формирования управляющего воздействия требуется, кроме текущего значения сигнала ошибки помнить все предыдущие значения — от е(0) до е(j-1).
Позиционный алгоритм можно модернизировать, сделав его
рекуррентным. Для этого обозначим
24

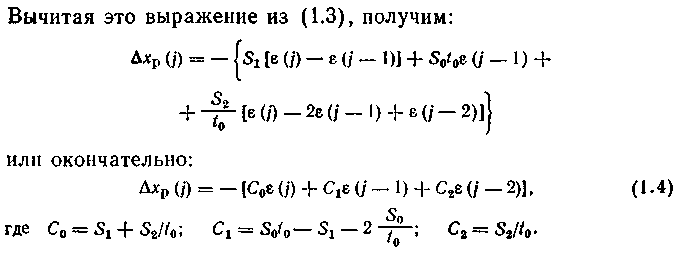
Чтобы вывести рекуррентный («скоростной») алгоритм, по которому текущее значение управления Xp(j) вычисляется как сумма предыдущего значения xp(j—1) и поправки &xp(j), запишем выражение для xp(j—1):
При этом рекуррентный алгоритм для ПИД-регулятора запишется в виде:

При малых значениях периода квантования t0 переходные процессы в дискретной и непрерывной АСР практически совпадают, поэтому выбор параметров настроек дискретных регу-
25
ляторов проводят по тем же соотношениям, что и непрерывных. Например, для ПИД-регулятора параметры настроек K1, Ко, K2 или Со, С1, С2, при малых значениях to можно вычислить по S1, S0, S2, используя формулы (1.3) или (1.4), в зависимости от выбранного алгоритма; значения же настроек непрерывного регулятора находят одним из рассмотренных ниже методов (см. разд. 1.2 и 1.4). Для дискретных П- и ПИ-регу-ляторов можно воспользоваться теми же формулами (1.3), (1.4), полагая в них равными пулю коэффициенты So и S2 для П-ре-гулятора или S2 — для ПИ-регулятора.
1.2. РАСЧЕТ НАСТРОЕК РЕГУЛЯТОРОВ В ОДНОКОНТУРНЫХ АСР
При определении настроек регуляторов в качестве показателя оптимальности системы регулирования обычно выбирают интегральный критерий качества (например, интегральный квадратичный критерий) при действии на объект наиболее тяжелого возмущения с учетом добавочного ограничения на запас устойчивости системы. В практических расчетах запас устойчивости удобно характеризовать показателем колебательности системы; его значение для систем, имеющих интегральную составляющую в законе регулирования, определяется максимумом амплитудно-частотной характеристики замкнутой системы регулирования.
В дальнейшем под оптимальными будем понимать настройки регулятора, обеспечивающие заданную степень колебательности т* процесса регулирования при минимуме интегрального квадратичного критерияJкв.
Среди инженерных методов расчета настроек регуляторов одни являются более точными, но трудоемкими для ручного счета, другие — простыми, по приближенными. Подробно эти методы изложены в различных пособиях и монографиях [19,23, 42—49]. Наиболее распространенными способами, отражающими методику точного и приближенного расчета настроек, являются метод расширенных частотных характеристик (РЧХ) и метод незатухающих колебаний (Циглера — Никольса). Метод РЧХ. По этому методу расчетные формулы для настроек регуляторов получают из условия, аналогичного критерию Найквиста: если разомкнутая система имеет степень колебательности не ниже заданной, то замкнутая система будет обладать заданной степенью колебательности в том случае, когда расширенная амплитудно-фазовая характеристика (РАФХ) разомкнутой системы Wpс(m, iw) проходит (рис. 1.4) через точку (1, i0), т. е.

26
Уравнение (1.5) равносильно двум уравнениям, записанным относительно расширенных амплитудно-частотных и фазоча-стотных характеристик объекта и регулятора:

Для заданных частотных характеристик объекта и выбранного закона регулирования при решении системы уравнений (1.6) находит вектор настроек регулятора S, обеспечивающих заданную степень колебательности на каждой частоте.
Для регуляторов с одним параметром настройки, у которых фр(m, w) не зависит от параметра S, из второго уравнения (1.6) находят рабочую частоту wр, а из первого — параметр настройки S*.
Для П-регулятора с передаточной функцией R(p)= - S1 рабочую частоту wр находят из уравнения

Для И-регулятора с передаточной функцией R(p) = - S0/p частоту wр определяют из уравнения
Для регуляторов с двумя параметрами настроек по уравнениям (1.6) в плоскости параметров настроек рассчитывают линию равной степени колебательности (рис. 1.5 а, б) для интервала частот, заданного условием

Для ПИ-регулятора с передаточной функцией R(p)= - Si - - So/p система уравнений (1.6) приводит к решению в виде:

Для ПД-регулятора с передаточной функцией R(p)= - Si - - S2p аналогичные формулы для настроек запишутся в виде:

27
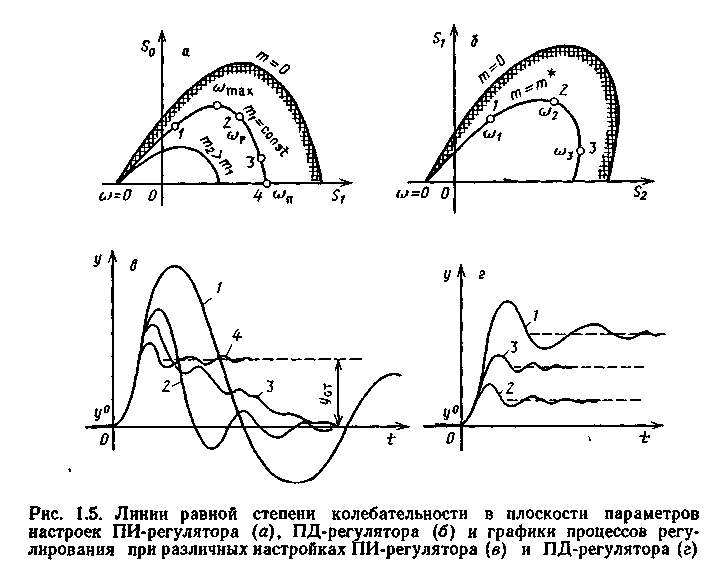
Разным точкам на кривой равной степени колебательности соответствуют различные процессы регулирования (рис. 1.5 в, г).
Рабочую частоту (см. рис. 1.5 а) выбирают из условий

соответствующих минимуму Jкв-
Для ПИД-регулятора с тремя параметрами настройки и передаточной функцией R(p)= - S1 - So/p - S2p из системы уравнений (1.6) можно найти настройки S\ и So как функции S2:

Оптимальные настройки регулятора рассчитывают следующим образом. Задаваясь различными значениями S2, по формулам (1.11) находят линии равной степени колебательности в плоскости параметров S1So (рис. 1.6а). Затем рассчитывают переходные процессы и по минимуму Jкв выбирают оптимальные S1*(S2), S0*(S2) при каждом значении S2 (обычно они соответствуют точке вблизи вершины кривой равной степени колебательности). Далее моделируют переходные процессы для каждого варианта настроек S2, S1*(S2), S0*(S2) и по ми-
28
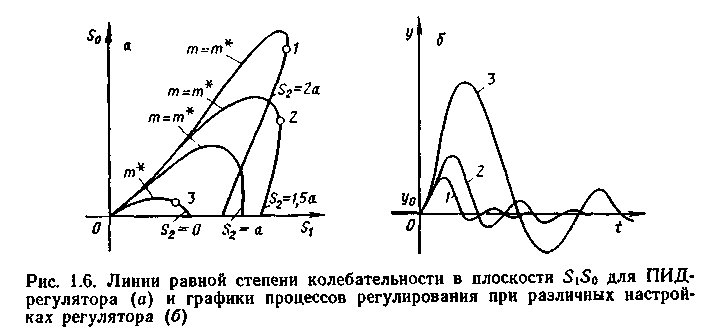
нимумуJкв выбирают оптимальное значение S2* и соответствующие ему S1*, So*. На рис. 1.66 приведены примеры процессов регулирования при различных значениях настроек ПИД-регулятора.
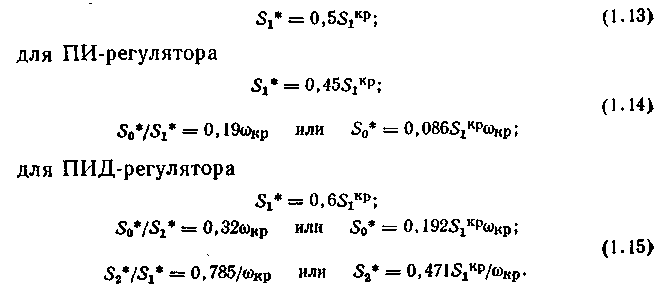
Метод незатухающих колебаний. В соответствии с этим методом расчет настроек ПИ- или ПИД-регуляторов проводят в два этапа: 1 — расчет критической настройки пропорциональной составляющей S1KP(S0=S2=0), при которой АСР будет находиться на границе устойчивости, и соответствующей ей wкр; 2 — определение по s1кр и wкр оптимальных настроек S1*, S0*, S2*, обеспечивающих степень затухания фи=0,8—0,9.
Уравнения для расчета S1Kp и соответствующей ей частоты wКР получают из уравнений (1.7), (1.8) при m=0:

Оптимальные настройки ПИ- и ПИД-регуляторов находят по следующим формулам: для П-регулятора
Метод Циглера — Никольса лежит в основе многих методов настройки дискретных ПИД-регуляторов. В частности, если
29
рекуррентный алгоритм управления, соответствующий аналоговому ПИД-закону, имеет вид

то для больших значений периода квантования /о параметры настройки K1*, Ко*, K2* могут быть найдены по следующим формулам [23]:
для П-регулятора
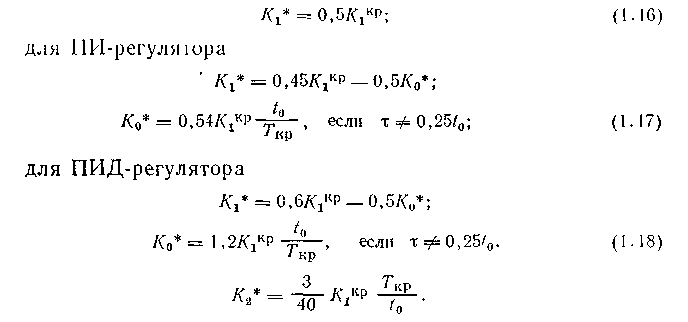
В уравнениях (1.16) — (1.18) K1кр и Ткр — коэффициент при П-составляющей закона управления и период колебаний выходной координаты, соответствующие режиму незатухающих колебаний АСР.
1.3. РАСЧЕТ НАСТРОЕК РЕГУЛЯТОРОВ В МНОГОКОНТУРНЫХ АСР
Удовлетворительное качество регулирования в простейшей одноконтурной системе с использованием стандартных законов регулирования можно обеспечить лишь при благоприятных динамических характеристиках объекта. Однако большинству промышленных объектов химической технологии свойственны значительное чистое запаздывание и большие постоянные времени. В таких случаях даже при оптимальных настройках регуляторов одноконтурные АСР характеризуются большими динамическими ошибками, низкой частотой регулирования и длительными переходными процессами. Для повышения качества регулирования необходим переход от одноконтурных АСР к более сложным системам, использующим дополнительные (корректирующие) импульсы по возмущениям пли вспомогательным выходным координатам. Такие системы кроме обычного стандартного регулятора содержат вспомогательные
30
регулирующие устройства — динамические компенсаторы или дополнительные регуляторы.
В зависимости от характе-
ра корректирующего импульса различают следующие много-коигуриыс АСР: комбинированные, сочетающие обычный замкнутый контур регулирования с дополнительным каналом воздействия, по которому через динамический компенсатор вводится импульс по возмущению; каскадные — двухконтурные замкнутые АСР, построенные па базе двух стандартных регуляторов и использующие для регулирования кроме основной выходной координаты дополнительный промежуточный выход; с дополнительным импульсом по производной от промежуточной выходной координаты.
1.3.1. Комбинированные АСР
Комбинированные системы регулирования применяют при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
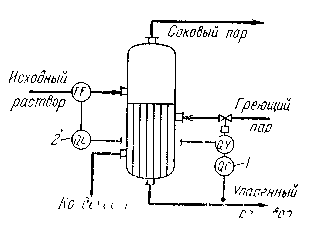
На рис. 1.7 приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущений является расход питания. Основная задача регулирования — стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара — выполняется регулятором 1. Кроме сигнала регулятора, на клапан, регулирующий подачу пара, через динамический компен-
сатор 2 поступает корректирующий импульс по расходу питания.
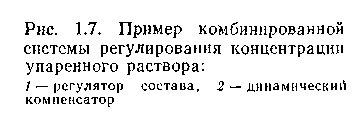
На рис. 1.8 приведен пример комбинированной АСР состава дистиллята в ректификационной колонне. Стабилизация со-
31
става дистиллята обеспечивается регулятором 5 путем изменения подачи флегмы на орошение колонны. Для повышения качества регулирования в системе предусмотрена автоматическая коррекция задания регулятору 5 в зависимости от одного из основных возмущений в процессе — расхода разделяемой смеси. Корректирующим импульс на задание регулятору поступает через динамический компенсатор 6".
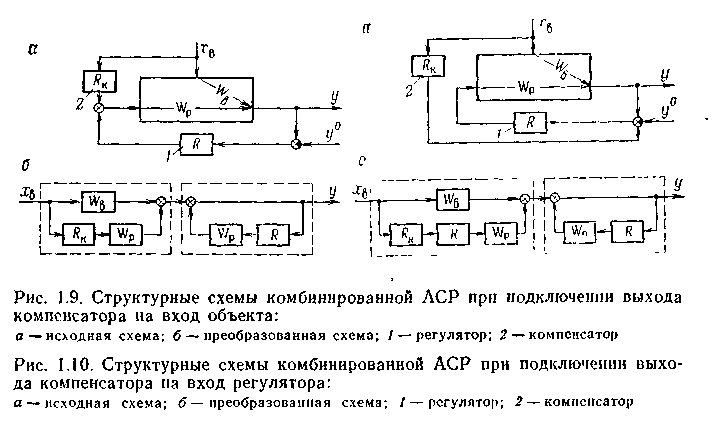
Рассмотренные примеры иллюстрируют два способа построения комбинированных АСР. Как видно из структурных схем (рис. 1.9 и 1.10), обе системы регулирования обладают общими особенностями: наличием двух каналов воздействия на выходную координату объекта и использованием двух коп-туров регулирования — замкнутого (через регулятор 1) и разомкнутого (через компенсатор 2). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.
Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибку регулирования при условии правильного выбора и расчета динамического устройства, формирующего закон изменения этого воздействия.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть, тождественно равным нулю при любых задающих или возмущающих воздействиях.
Для выполнения принципа инвариантности необходимы два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Очевидно, что достижение абсолютной инвариантности в реальных системах регулирования практически невозможно. Обычно
32
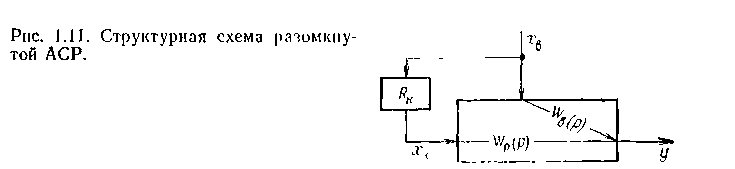
ограничиваются частичной инвариантностью по отношению к наиболее опасным возмущениям. Рассмотрим условие инвариантности разомкнутой и комбинированной систем регулирования по отношению к одному возмущающему воздействию. Условие инвариантности разомкнутой и комбинированной АСР. Рассмотрим условие инвариантности разомкнутой системы (рис. 1.11): y(t)=0.
Переходя к изображениям по Лапласу Хв(р) и Y(p) сигналов хв(t) н y(t), перепишем это условие с учетом передаточных функций объекта по каналам возмущения Wв(p) и регулирования Wp(p) и компенсатора RK(p):

При наличии возмущения [XB(p) <>0] условие инвариантности (1.19) выполняется, если

Таким образом, для обеспечения инвариантности системы регулирования по отношению к какому-либо возмущению необходимо установить динамический компенсатор, передаточная функция которого равна отношению передаточных функций объекта по каналам возмущения и регулирования, взятому с обратным знаком.
Выведем условия инвариантности для комбинированных АСР. Для случая, когда сигнал от компенсатора подается на вход объекта (см. рис. 1.9 а), структурная схема комбинированной АСР преобразуется к последовательному соединению разомкнутой системы и замкнутого контура (см. рис. 1.96), передаточные функции которых соответственно равны:
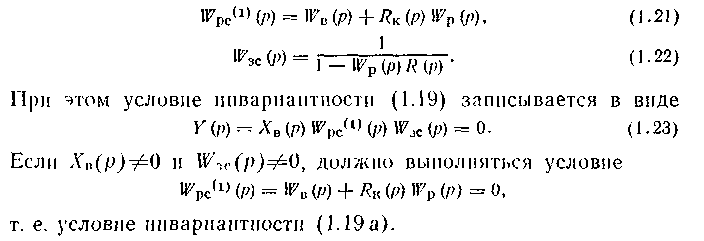
33
При использовании комбинированной системы регулирования (см. рис. 1.10 а) вывод условий инвариантности приводит к соотношениям (см. рис. 1.106):
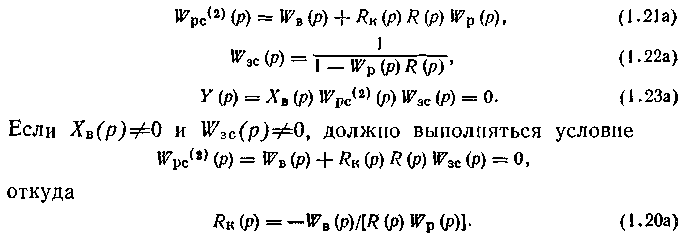
Таким образом, при подключении выхода компенсатора на вход регулятора передаточная функция компенсатора, полученная из условия инвариантности, будет зависеть от характеристик не только объекта, но и регулятора.
Условия физической реализуемости инвариантных АСР. Одной из основных проблем, возникающих при построении инвариантных систем регулирования, является их физическая реализуемость, т. е. реализуемость компенсатора, отвечающего условиям (1.20) или (1.20 а).
В отличие от обычных промышленных регуляторов, структура которых задана и требуется лишь рассчитать их настройки, структура динамического компенсатора полностью определяется соотношением динамических характеристик объекта по каналам возмущения и регулирования и может оказаться очень сложной, а при неблагоприятном соотношении этих характеристик - физически нереализуемой.
«Идеальные» компенсаторы физически нереализуемы в следующих двух случаях.
1. Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения. В этом случае идеальный компенсатор должен содержать звено упреждения, так как если
2. Если в передаточной функции компенсатора степень полинома в числителе больше, чем степень полинома в знаменателе. В этом случае компенсатор должен содержать идеальные дифференцирующие звенья. Такой результат получается при
34
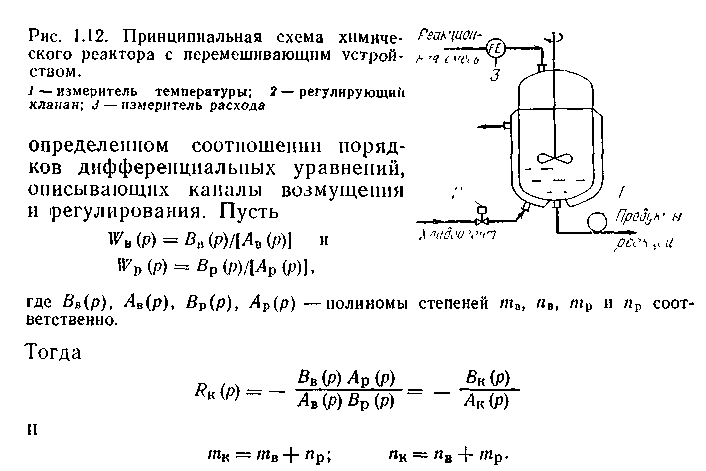
Таким образом, условие физической реализуемости инвариантной АСР заключается в том, чтобы выполнялись соотношения

Пример. Рассмотрим систему регулирования температуры в химическом реакторе с перемешивающим устройством, в котором протекает экзотермическая реакция (рис. 1.12). Пусть основной канал возмущения — «расход реакционной смеси — температура в реакторе» — аппроксимируется двумя апериодическими звеньями первого порядка, а канал регулирования — «расход хладоагента — температура в реакторе» — тремя апериодическими звеньями первого порядка:

где T1, Т2, Т3 — наибольшие постоянные времени основных тепловых емкостей реактора, термометра и охлаждающей рубашки.
Для построения инвариантной системы регулирования необходимо ввести компенсатор с передаточной функцией
который физически нереализуем, так как в данном случае нарушается условие (1.24), и компенсатор должен содержать идеальное дифференцирующее звено.
Техническая реализация инвариантных АСР. При практической реализации разомкнутых и комбинированных АСР обычно добиваются приближенной инвариантности системы по отношению к рассматриваемому возмущению в наиболее опасном диапазоне частот. При этом реальный компенсатор выбирают из числа наиболее легко реализуемых динамических звеньев, параметры которых рассчитывают из условия близости частот-