
Если использовать разности высших порядков вплоть до n-го, то разностное уравнение 1
| Вид материала | Документы |
СодержаниеК имеет неполный ранг, если нельзя выделить ни одного определителя той же размерности, что и у R(p)=—Si, интегрального (И-) R(p) = Оценка возможностей использования одноконтурных АСР. |
- Частные производные и дифференциалы высших порядков п. Частные производные высших порядков, 190.6kb.
- Статья Тема: «Уравнения высших степеней с параметрами», 55.64kb.
- § Тема. Некоторые определения и обозначения, 1005.59kb.
- Статьи на русском, 122.97kb.
- Решение кубического уравнение в общем виде. От общего кубического уравнения к упрощённому, 14.77kb.
- У (к = 1,2,…). Однако на практике часто выгоднее выражать значения производных не через, 96.45kb.
- Содержание уравнения математической физики (нм-3) Уравнения математической физики (нп-3), 92.05kb.
- Определители 2-го и 3-го порядков: определения и применение к решению систем линейных, 42kb.
- Диффузия в биологических системах. Диффузия, 145.79kb.
- Методические рекомендации студентам, 215.81kb.
70
и по имеющимся приближенным аналитическим моделям. Аналогичную оценку можно дать предельным и среднеквадратичным отклонениям Ас и ос, AL и oL.
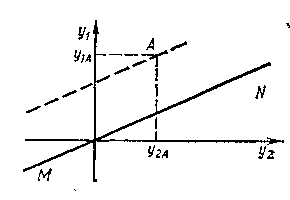
Анализ статических связей между переменными. Цель такого анализа — выявление статически независимых управляющих воздействий и регулируемых параметром
Связи между различными переменными могут возникать вследствие выполнения условий материального и теплового баланса, действия тех или иных физико-химических законов.
Например, при регулировании уровня в емкости массовые расходы поступающей и отводимой жидкости в статическом режиме должны быть равны, а уровень в емкости должен быть постоянным. Таким образом, только один из двух расходов является независимым. Если па входе в емкость и па выходе из нее имеется несколько потоков, то условие соблюдения материального баланса уменьшает число независимых расходов на единицу. В кубе ректификационной колонны концентрация и температура жидкости при постоянном давлении связаны в статическом режиме однозначной зависимостью, так как кубовая жидкость находится в состоянии кипения.
Связи между выходными переменными возникают еще и потому, что в системе регулирования часть из них вычисляют, используя значения других переменных. Например, массовый расход газа рассчитывают, используя его объемный расход, температуру, давление и т.п.
При выборе структуры системы регулирования ограничением является следующее правило: неременные, подлежащие стабилизации, следует выбирать таким образом, чтобы они были статически независимы друг от друга, т. е. чтобы в статическом режиме ни одна из них не определялась значениями других.
Так, в кубе ректификационной колонны нельзя регулировать температуру 0 и концентрацию с. с помощью двух регуляторов. В качестве регулируемых переменных может быть выбран уровень и одна из величин — с или О
Нарушение указанною правила приводит к статической переопределенности системы. Даже если задания регуляторам согласованы со связью между переменными, т. е. условия y1= y01 и удовлетворяют объективно существующей связи

система окажется неработоспособной, ибо неизбежные ошибки в задании y°i и у°г приведут к тому, что равенство f(y°i,y°2) = -=0 не будет выполнено Последнее означает, например, что емкость, у которой стабилизированы расходы на входе и выходе, постепенно переполнится пли опустеет, несмотря па то, что стабилизаторам расходов установлены одинаковые задания. Поэтому стабилизировав можно лишь один расход и не-
71
зависимый от него в статическом режиме уровень в емкости.
Для того чтобы технологический
процесс был статически управляем,
нужно, чтобы число независимых,
управляющих воздействий было не меньше числа стабилизи
руемых переменных (т. е. если размерность вектора и окажет
ся меньше размерности статически независимых составляющих
вектора у, то некоторые составляющие у невозможно будет
скомпенсировать изменением и). *
Однако и в том случае, когда размерность и больше раз- мерности у, объект может оказаться статически неуправляе- ' мым, если матрица К коэффициентов усиления, связывающих в статике векторы у и и, имеет неполный ранг.
В статике в линейном приближении векторы и к у связаны
соотношением у = Ки, где К — матрица коэффициентов усиле
ния передаточных функций Wu. Для объекта, астатического
по некоторому каналу, в матрице К. коэффициент усиления по-
лагают сколь угодно большим.
Матрица К имеет неполный ранг, если нельзя выделить ни одного определителя той же размерности, что и у, отличного от нуля. Геометрически это означает, что изменения вектора у, связанные с изменениями управлений, лежат в пространстве Y в некоторой плоскости, и только те возмущения, которые вызывают отклонения у в этой плоскости, могут быть скомпенсированы управляющими воздействиями.
Пример. Пусть связь между векторами у и и имеет форму
Изменения управляющих воздействий вызывают только такие изменения y1 и y2, при которых Д(/|/Д(/2=0,5. Таким образом, вектор у может в результате изменения и меняться вдоль прямой MN или прямых, параллельных ей. Если в результате действия возмущений значения y1 и y2 оказались рапными У\л и г/2,4 (рис. 1.51), то изменением и нельзя возвртить вектор у и начало координат.
Если размерность у равна двум, а размерность и — трем, связь между и и w в статике имеет форму
72
Объект статически управляем, если хотя бы один из определителей

отличен от пуля.
Анализ статики объекта по каналам возмущений позволяет в ряде случаев уменьшить число регулируемых переменных. Связь между составляющими у и возмущениями z в статике имеет форму
где kvi — коэффициенты усиления по каналам возмущения. Если выполнено неравенство
то возмущающие воздействия не вызывают статического отклонения yv, большего, чем это допустимо. Динамические же отклонения yv, как следует из передаточных функций (1.49),
73

(1 50), заведомо меньше Ду. Таким образом, нет необходимости в специальном регуляторе для стабилизации yv
После синтеза системы регулирования следует проверить, не приведут ли изменения управляющих воздействии к существенным отклонениям yv в результате взаимосвязанности каналов регулирования.
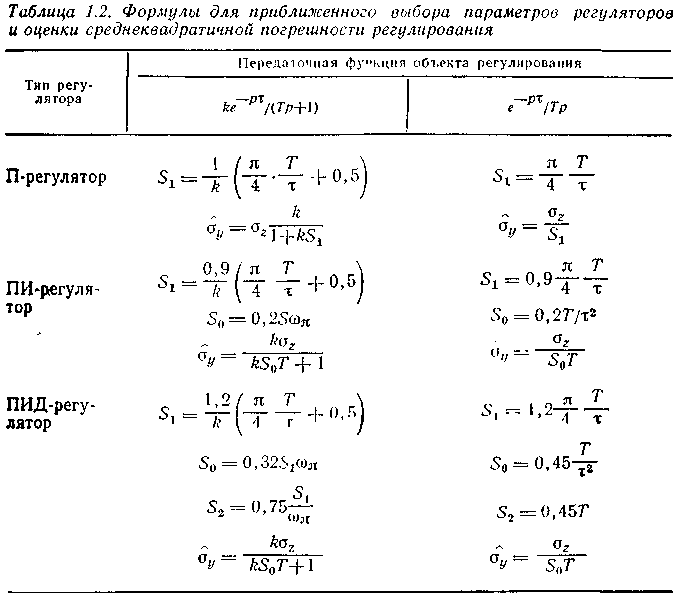
Выбор параметров регуляторов и оценка качества регулирования. При выборе параметров передаточных функции типовых промышленных регуляторов:
пропорционального (П-) R(p)=—Si, интегрального (И-) R(p) =—S0/p,
пропорционально-интегрального (ПИ-) R(p) ——S"/p--St, пропорционально-интегрального с импульсом но производной (ПИД-) R(p)=—Solp—St— S2p
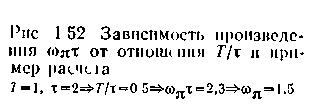
широко используют приближенные формулы (см. раздел 1.2), основанные на методике Циглера — Никольса Формулы, связывающие настройки регуляторов S0, Si, S2 с характеристиками объекта, собраны в табл. 1.2. В этой таблице для статического объекта через wп обозначена частота, на которой АФХ объекта пересекает отрицательную действительную полуось (имеет фазовый сдвиг, равный я). Она является корнем уравнения

Удобно находить wя по кривой, изображенной на рис 1.52.
В табл. 1.2 приведены верхние оценки а// для среднеквадратичного отклонения регулируемой величины при возмущающем воздействии, имеющем дисперсию cr2z Эти оценки получены следующим образом. Для замкнутой системы с ПИ- и ПИД-регуляторами, настройки которых выбраны по формулам табл. 1.2, амплитудно-фазовая характеристика приближенно запишется в виде -
Известно, что при воздействии на систему случайного процесса со спектральной плотностью Sг(W) среднеквадратичная ;
74
ошибка выходной координаты у может быть, подсчитана как

где Азс —АЧХ замкнутой системы
На этапе предварительного выбора структуры системы регулирования спектральная плотность s2(w) неизвестна, но можно оценить ее дисперсию, связанною со спектральной плотностью, выражением
Для оценки ац сверху воспользуемся тем, что при заданной oz среднеквадратичное отклонение у максимально, когда вся энергия возмущающею сигнала сосредоточена на топ частоте, на которой функция Аc(a>) максимальна. Обозначим эту частоту Юр (она близка к рабочей частоте замкнутой системы) и примем

Подставляя это выражение в формулу (1.53), получим ау =
= ОгЛзс(о)р).
Для П-регулятора модуль АФХ замкнутой системы достигает максимума на частотах, близких к нулю, и равен для статического объекта

а для астатического объекта

В системах с ПИ- и ПИД-регуляторами при выборе на
строек по табл. 1.2 частота wр оказывается приблизительно
равной (S0k/T)i/2; тогда
Эти величины и использованы для получения оценки среднеквадратичной погрешности.
Если возмущающих воздействии несколько, оценку для Оу можно подсчитать но тем же формулам, подставив

Здесь опр2; — среднеквадратичные значения возмущений, приведенные ко входу предполагаемого капала регулирования.
75
Приведение осуществляется по формуле
в которой W в, и W р — частотные характеристики объекта соответственно по каналам возмущения и регулирования. Для статического объекта с передаточной функцией WCT(p) =k/(Tp-{--И)е-Рт
Оценка возможностей использования одноконтурных АСР.
Для выбора локальных контуров регулирования удобно результаты расчетов свести в таблицу, характеризующую возможности использования тех или иных каналов регулирования. Для каждого из управляющих воздействий uv и регулируемых переменных у, при тех или иных типовых законах регулирования в таблицу вносят отношение a, v рассчитанной оценки ау, к допустимому отклонению. Если это отношение оказывается больше единицы, или если между управлением wv и переменной у, нет связи, ставят прочерк. Таким образом, если прочерки стоят в какой-либо строке, это значит, что данное управляющее воздействие неприменимо. Если же прочерки стоят во всех клетках некоторого столбца, это значит, что данный параметр нельзя стабилизировать с требуемой точностью с помощью одноконтурных АСР. Такие строкиi и столбцы на данном этапе исключаем из рассмотрения.

к допустимому отклонению Д«/;.
Наиболее простои закон регулирования — пропорциональный, поэтому в первую очередь проверяем возможность использования П-регулятора. Показателем качества регулирования в этом случае служит наибольшее из двух чисел — u;v • (отношение среднеквадрашчной ошибки к максимальному допустимому ее значению) или 3; v—отношение статической ошибки регулирования
76

При подсчете статической ошибки регулирования значения каждого из возмущений Az, приводят ко входу канала регулирования из условия

и в формулу (1.57) подставляют наибольшее приведенное cтa-тическое возмущение. Такой подход правомерен, потому что вероятность статического отклонения одновременно нескольких возмущающих воздействий от номинальных значений па предельную величину очень мала.
При выборе контуров регулирования каждой из регулируемых переменных у, нужно сопоставить одно из управляющих воздействий uv. При этом необходимо учесть, что одно и то же , управление нельзя использовать для регулирования двух или бо-
- лее величин. Критерием правильности выбора контуров регули
рования может служить наибольшее значение показателя каче-
- ства для выделенных контуров. При оптимальном выборе это
значение должно быть возможно меньше.
Рассмотрим пример выбора одноконтурной АСР с П-регулятором (табл. 1.3). В отличие от показателей качества отдельных контуров регулирования введем показатель качества АСР процесса:
Требуется так выбрать управления и для каждой из переменных у,, чтобы, во-первых, значение II оказалось минимальным и, во-вторых, каждое управление было использовано лишь для одной регулируемой величины
Поставленная задача относится к так называемым задачам О назначениях, для решения которых при большой размерно-
сти у и и имеется целый ряд алгоритмов, ориентированных на использование ЦВМ. Однако при небольшой размерности этих векторов приемлемое решение можно наши с использованием следующей процедуры. 1-й шаг. Выбирают начальное приближение искомого ре-
шения. Для этого временно отбрасывают второе из приведенных
.
77
требований и для каждого у, находят управление, обеспечивающее минимальное значение показателя качества одноконтурной АСР с регулятором данного типа (в табл. 1.3 соответствующие числа отмечены звездочкой). Максимальное из отмеченных значений П (в табл. 1.3 оно равно 0,4 и соответствует контуру г/4~г/2) заведомо не превосходит Пщш Однако может оказаться, что одно и то же управление сопоставлено нескольким регулируемым переменным (в табл. 1.3 оказалось, что и8 используется для регулирования г/2 и у5). Если такой ситуации не возникло, найденное решение удовлетворяет условиям задачи, и П* =
= Пщт.
2-й шаг. Для регулируемых переменных, которым оказалось сопоставлено одно управление, ищут подходящее среди «свободных» управлений, т. е управление, которое на первом шаге не сопоставлено ни одной из переменных у, п для которого показатель качества минимален В рассматриваемом примере для у2 и г/5 находят «свободное» управление и7, которое при регулировании у2 может обеспечить показатель качества 0,4. Так как это значение не превосходит П1', задача решена, ибо показатель качества системы не ухудшился, а все ограничения выполнены.
Таким образом, структура системы определяется соответствиями у2~и7; 3~«i; #4~«2; У5~«8, а Ятш = 0,4.
Прочерк в первом столбце табл. 1.3 говорит о том, что параметр г/i нельзя регулировать при использовании одноконтурной системы с П-регулятором. Для всех подобных переменных на следующем этапе составляют таблицу показателей качества при использовании ПИ-регулятора и аналогичным образом выбирают контуры регулирования. Затем, если необходимо, выбирают контуры регулирования с ПИД-регуляторами. Если в некоторых столбцах таблицы стоят прочерки по всем управлениям для всех типов регуляторов, значит, необходимо использовать дополнительные средства улучшения качества регулирования. Предварительный выбор схемных методов улучшения качества регулирования. Среди методов повышения качества регулирования за счет усложнения структуры систем регулирования наиболее распространены следующие:
1) введение импульса по пошущению; 2) введение динамической компенсации в системах взаимосвязанного регулирования; 3) использование каскадных АСР; 4) введение в АСР импульса по значению промежуточной координаты.
Подробно каждый из этих способов и выбор параметров корректирующих устройств изложены в разделе 1.2 Здесь мы остановимся только на возможностях предварительной оценки полезности использования схемных методов повышения качества при выборе структуры системы.
Введение в систему регулирования импульса по возмущению целесообразно в том случае, если показатель качества а при выборе любого из типовых законов регулирования для данного
78
параметра оказался больше единицы, причем в формуле (1 54) для расчета среднеквадратичной величины приведенного возмущения доминируют одно или два возмещающих воздействия, которые доступны прямому или косвенному измерению. Такое введение полезно и тогда, когда одно из доступных измерению возмущении имеет значительное статическое отклонение Аг. При правильном выборе характеристик динамического компенсатора (см. разд. 1 2) их влияние существенно уменьшается, и соответствующие слагаемые в уравнении (1.54) можно исключить. Показатель качества регулирования при этом уменьшится (если он станет меньше единицы, соответствующее значение можно подставить в таблицу и использовать при дальнейшем анализе). В системах с взаимосвязанными параметрами регулирующие воздействия влияют не только па «собственную», но и на другие регулируемые переменные, являясь для них дополнительным» возмущениями, которые следует учитывать при расчете показателей качества регулирования и и [5 Сели вклад этих возмущений в среднеквадратичную ошибку значителен и показатель качества регулирования больше единицы, нужно ввести динамические компенсаторы, т е перейти к системе автономного регулирования.
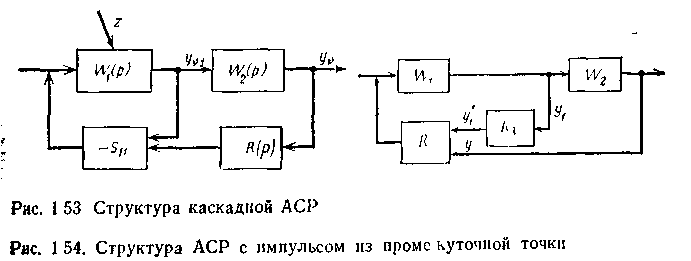
Если после компенсации влияния возмущений для регулирования некоторых параметров нельзя использовать одноконтурную систему (т. е. соответствующие таблицы остались незаполненными), целесообразно оценить возможности каскадной АСР • (рис. 1.53). В этой системе (см. разд. 1.2.2) вспомогательный регулятор поддерживает на заданном уровне промежуточный параметр yv\, а основной регулятор меняет задание вспомогательному так, чтобы стабилизировать регулируемую величи-
vyVv
При использовании каскадной АСР возмущающие воздействия z, влияющие на yv через изменение yvi, гасятся во внутреннем контуре. Требования к статической ошибке поддержания yvi обычно невысоки, и во вспомогательном контуре может быть использован П-регулятор с параметром настройки Sц, найденным по приближенным формулам (табл 1.2) для объекта с передаточной функцией W\(p). С помощью той же табли-
79

цы можно оцепить oyi — среднеквадратичное отклонение промежуточной координаты.
Для вычисления среднеквад
ратичного отклонения основной
регулируемой переменной сле
дует перейти к эквивалентной
системе, в которой возмущающие
воздействия г заменены возму
щением j/vi, влияющим на ;/v
через передаточную функцию
W 2(p) и имеющим дисперсию
о2,,! Передаточная функция эк
вивалентного объекта W3 равна
произведению передаточной
функции системы регулирования t/v 1 на W2. Передаточная функция вспомогательного контура регулирования, содержащего П-регулятор, равна (см. табл. 1.2)

Аппроксимируя передаточную функцию эквивалентного объекта WB(p)W2(p) апериодическим или интегрирующим звеном с запаздыванием, оценивают 0tfv для одноконтурной системы (по формулам табл. 1.2) с тем или иным типом основного регулятора и рассчитывают соответствующие значения показателя качества.
Для схемы с отбором импульса из промежуточной точки (рис. 1.54) параметры динамической связи, имеющей обычно вид реального дифференцирующего звена

стремятся выбрать так, чтобы эквивалентный объект, выходом которого является сумма у\' + у, в статическом режиме вел себя как объект с передаточной функцией Wl(p)Wz(p), а при высоких частотах был близок к объекту с передаточной функцией Wi(p)kcITf. Если Wi'(P) и Wz(p) аппроксимированы апериодическими звеньями с запаздыванием, то передаточная функция эквивалентного объекта приближенно равна

По ней и выбирают параметры регулятора (с использованием формул табл. 1 2) и рассчитывают <зу и соответствующее значение а.