Если использовать разности высших порядков вплоть до n-го, то разностное уравнение 1
| Вид материала | Документы |
Содержание1.3.3. АСР с дополнительным импульсом по производной из промежуточной точки |
- Частные производные и дифференциалы высших порядков п. Частные производные высших порядков, 190.6kb.
- Статья Тема: «Уравнения высших степеней с параметрами», 55.64kb.
- § Тема. Некоторые определения и обозначения, 1005.59kb.
- Статьи на русском, 122.97kb.
- Решение кубического уравнение в общем виде. От общего кубического уравнения к упрощённому, 14.77kb.
- У (к = 1,2,…). Однако на практике часто выгоднее выражать значения производных не через, 96.45kb.
- Содержание уравнения математической физики (нм-3) Уравнения математической физики (нп-3), 92.05kb.
- Определители 2-го и 3-го порядков: определения и применение к решению систем линейных, 42kb.
- Диффузия в биологических системах. Диффузия, 145.79kb.
- Методические рекомендации студентам, 215.81kb.
35
ных характеристик идеального [Rк(iw)] и реального [Rк(iw)] компенсаторов в этом диапазоне частот:

При такой постановке задачи условие приближенно» инвариантности примет вид

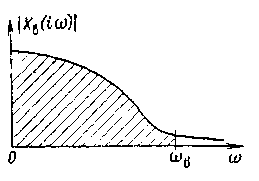
Как видно из (1.17), диапазон [wн, wв] в разомкнутой АСР определяется частотным спектром сигнала возмущения |XB(iw)|. В химико-технологических процессах сигналы, как правило, являются низкочастотными, и их мощность, в основном, сосредоточена в диапазоне [0, wв], т. е. (рис. 1.13)

Комбинированную АСР можно рассматривать как двухступенчатый фильтр для сигнала возмущения, состоящий из разомкнутой АСР и замкнутого контура, который является фильтром для определенных частот. Характерной особенностью замкнутой системы регулирования является наличие пика на амплитудно-частотной характеристике на рабочей частоте wр (рис. 1.14), в окрестности которой он обладает наихудшими фильтрующими свойствами. Поэтому чаще всего условие приближенной инвариантности (1.25) для комбинированных АСР записывается для двух частот: w = 0 и w = wp. При этом компенсация возмущения на нулевой частоте обеспечивает инвариантность системы в установившихся режимах, если Aзс(w)<>0 при w = 0 (например, при использовании П-регулятора в замкнутом контуре), или если |Хв(w)|—oo при w = 0 (например, при ступенчатых возмущениях).
На рис. 1.15 и 1.16 качественно показаны спектры ошибки
регулирования в одноконтурной АСР с пропорциональным ре
гулятором (рис. 1.15) и в частично
инвариантной
АСР (рис. 1.16).
Выбор структуры реального компенсатора диктуется частотны-

36

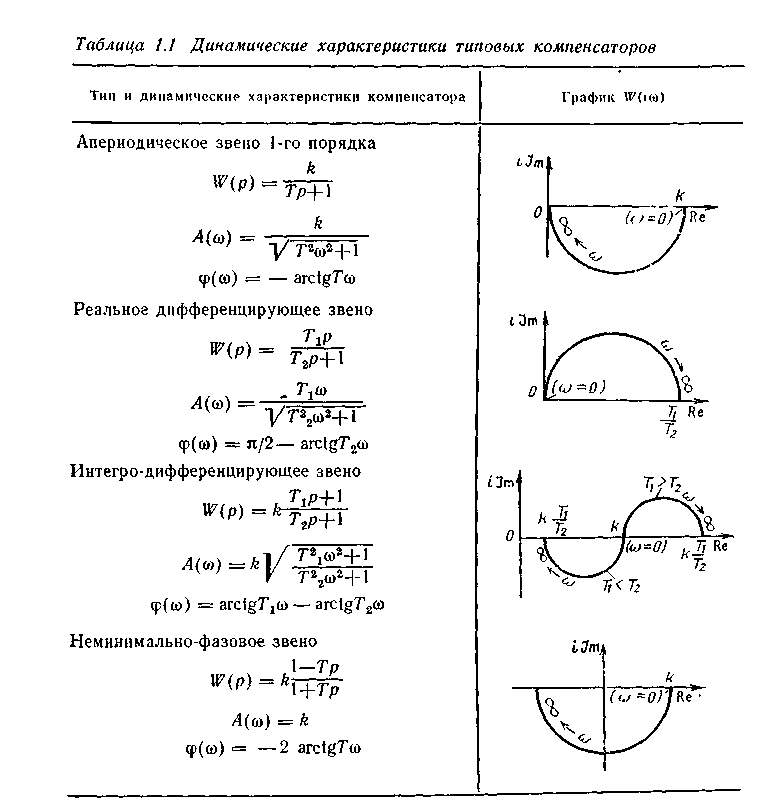
ми характеристиками идеального компенсатора в диапазоне частот [0, сор]. Обычно компенсаторы выбирают как комбинацию простейших линейных звеньев: апериодического первого порядка и реального дифференцирующего. В табл. 1.1 приведены динамические характеристики наиболее распространенных типов компенсаторов.
Таким образом, расчет комбинированной частично инвариантной АСР включает следующие этапы:
- расчет настроек регулятора и определение рабочей час
тоты в одноконтурной системе регулирования;
- вывод передаточной функции идеального компенсатора
из условия инвариантности и анализ его реализуемости;
- выбор реального компенсатора и определение его пара
метров из условия приближенной инвариантности в наиболее
существенном для системы диапазоне частот.
Рассмотрим примеры расчета комбинированных систем регулирования.

37
Пример 1. Динамические характеристики объекта по каналам возмущения и регулирования описываются передаточными функциями

В комбинированной АСР используется П-регулятор с передаточной функцией R(р)= - S1. Требуется рассчитать настройки регулятора, выбрать компенсатор и определить его параметры из условия инвариантности на нулевой и рабочей частотах. Решение. Определяем настройки регулятора по методу Циглера — Никольса. Из системы уравнений

38
определяем критическую частоту w kp и критический коэффициент усиления регулятора s1kp, при которых замкнутая система регулирования будет находиться на границе устойчивости:

Рабочую частоту wp принимаем приближенно равной wкр, а оптимальную настройку регулятора равной S1* = 0,5S1KP = 0,917.
Передаточная функция компенсатора из условия инвариантности (1.20), с учетом (1.19) имеет вид:

Так как компенсатор с передаточной функцией (1.30) не содержит звеньев с отрицательным чистым запаздыванием и степень полинома числителя не превосходит степени полинома знаменателя, идеальный компенсатор физически реализуем. Однако техническая реализация такого устройства достаточно сложна, поскольку оно включает звенья чистого запаздывания, реальное дифференцирующее и апериодическое звено 1-го порядка. Поэтому целесообразно подобрать реальный компенсатор более простой структуры.
Для выбора типа реального компенсатора построим частотные характеристики идеального компенсатора в диапазоне частот [0, wр]. Из уравнения (1.30) при p = iw получим:
амплитудно-частотная характеристика

39

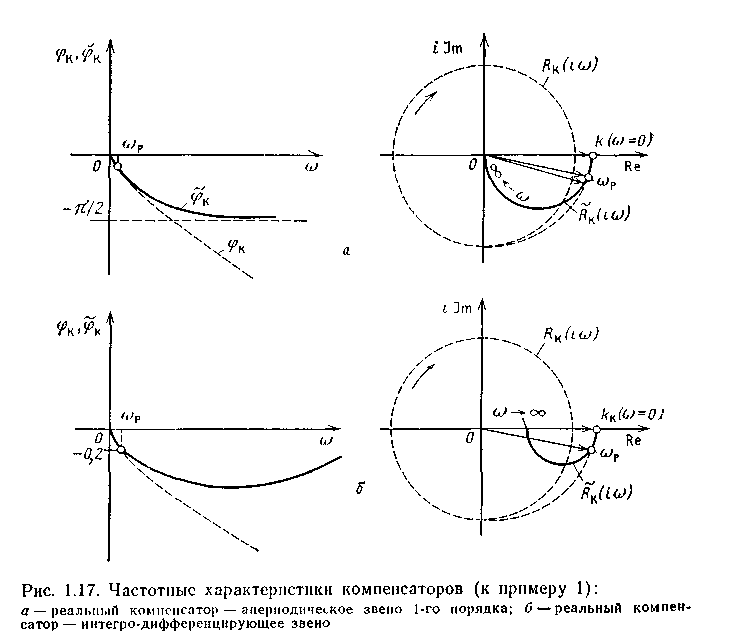
Так как в интервале w [0; 1,54] годограф RK(iw) проходит в четвертом квадранте, в качестве реального компенсатора можно выбрать апериодическое звено 1-го порядка или интегро-дифференцирующее звено. В первом случае (рис. 1.17а) система уравнений (см. табл. 1.1)

не имеет точного решения. Если принять приближенно T=0,145, то wк(1,54) = = - 0,219 и Aк (1,54) =0,49.
Для интегро-дифференцирующего звена (рис. 1.17б) параметры Т1 и Т2 находим из системы уравнений

Получаем T1=0,066; T2=0,2.
Пример 2. Передаточные функции объекта и регулятора имеют вид:

Расчет комбинированной системы регулирования, аналогичный рассмот
ренному в примере 1, приводит к следующим результатам.
Оптимальные настройки регулятора и рабочая частота равны соответственно S1*= 1,09; S0* = 0,42; wр = 2,02.
Идеальный компенсатор — звено чистого запаздывания, так как
40
Рабочая частота на годографе RK(iw) находится в четвертом квадранте [фк (2,02)=—0,81], поэтому в качестве реального компенсатора выбираем устройство с передаточной функцией вида (см. табл. 1.1)

Параметры kк и Т находим из условий

Отсюда Т=0,21. Частотные характеристики «идеального» и реального компенсаторов показаны на рис. 1.18.
1.3.2. Каскадные АСР
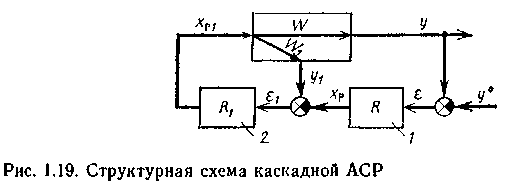
Каскадные системы применяют для автоматизации объектов, обладающих большой инерционностью по каналу регулирования, если можно выбрать менее инерционную по отношению к наиболее опасным возмущениям промежуточную координату и использовать для нее то же регулирующее воздействие, что и для основного выхода объекта.
В этом случае в систему регулирования (рис. 1.19) включают два регулятора — основной (внешний) регулятор, служащий для стабилизации основного выхода объекта у, и вспомогательный (внутренний) регулятор, предназначенный для регулирования вспомогательной координаты у1. Заданием для вспо-могатель'ного регулятора служит выходной сигнал основного регулятора.
Выбор законов регулирования определяется назначением регуляторов:
для поддержания основной выходной координаты на заданном значении без статической ошибки закон регулирования основного регулятора должен включать интегральную составляющую;
от вспомогательного регулятора требуется прежде всего быстродействие, поэтому он может иметь любой закон регулирования (в частности пропорциональный как наиболее простой и достаточно быстродействующий).
Сравнение одноконтурных и каскадных АСР показывает, что вследствие более высокого быстродействия внутреннего контура в каскадной АСР повышается качество переходного процесса, особенно при компенсации возмущений, поступающих по каналу регулирования (как будет показано ниже, при
41

этом инерционность эквивалентного объекта благодаря внутреннему контуру снижается по сравнению с инерционностью основного канала регулирования).
Если по условию ведения процесса на вспомогательную переменную накладывается ограничение (например, температура не должна превышать предельно допустимого значения или соотношение расходов должно лежать в определенных пределах), то на выходной сигнал основного регулятора, который является заданием для вспомогательного регулятора, также накладывается ограничение. Для этого между регуляторами устанавливается устройство с характеристиками усилительного звена с насыщением.
Примеры каскадных АСР технологических объектов. На рис. 1.20 приведен пример каскадной системы стабилизации температуры жидкости на выходе из теплообменника, в которой вспомогательным контуром является АСР расхода греющего пара. При возмущении по давлению пара регулятор 1 изменяет степень открытия регулирующего клапана таким образом, чтобы поддержать заданный расход. При нарушении теплового баланса в аппарате (вызванном, например, изменением входной температуры или расхода жидкости, энтальпии пара, потерь тепла в окружающую среду), приводящем к отклонению выходной температуры от заданного значения, регулятор температуры 2 корректирует задание регулятору расхода /.
В химико-технологических процессах часто основная и вспомогательная координаты имеют одинаковую физическую природу и характеризуют значения одного и того же технологического параметра в разных точках системы (рис. 1.21).
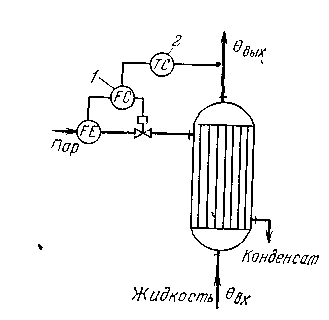
На рис. 1.22 показаны фрагмент технологической схемы, включающий подогреватель реакционной смеси и реактор, и система стабилизации температуры в реакторе. Регулирующее воздействие — расход пара — подается на вход теплообменника. Канал регулирования, включающий два аппарата и

42
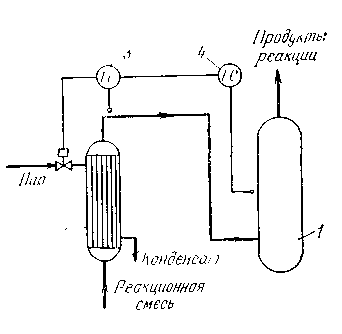
трубопроводы, является слож
ной динамической системой с
большой инерционностью.
На объект действует ряд возмущений, поступающих в разные точки системы, — давление и энтальпия пара, температура и расход реакционной смеси, потери тепла в реакторе и т. п. Для повышения быстродействия системы регулирования применяют каскадную АСР, в которой основной регулируемой переменной является температура в реакторе, а в качестве вспомогательной выбрана температура смеси между теплообменником и реактором. Расчет каскадных АСР. Расчет каскадной АСР предполагает определение настроек основного и вспомогательного регуляторов при заданных динамических характеристиках объекта по основному и вспомогательному каналам. Поскольку настройки основного и вспомогательного регуляторов взаимозависимы, расчет их проводят методом итераций.
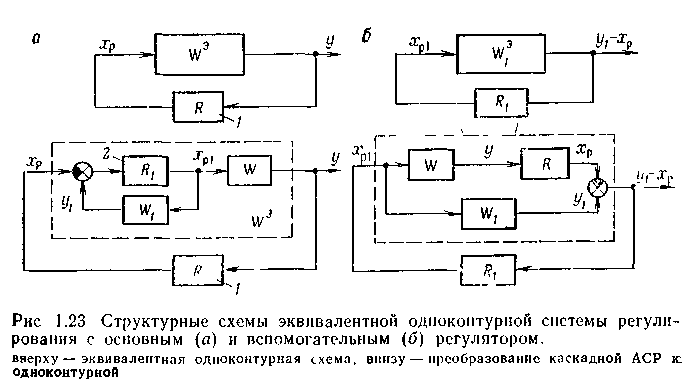
На каждом шаге итерации рассчитывают приведенную одноконтурную АСР, в которой один из регуляторов условно относится к эквивалентному объекту. Как видно из структурных схем на рис. 1.23, эквивалентный объект для основного регулятора / (рис. 1.23 а) представляет собой последовательное соединение замкнутого вспомогательного контура и основного
43
канала регулирования; передаточная функция его равна

Эквивалентный объект для вспомогательного регулятора 2 (рис. 1.23,6) является параллельным соединением вспомогательного канала и основной разомкнутой системы. Его передаточная функция имеет вид:

В зависимости от первого шага итерации различают два метода расчета каскадных АСР.
1-й метод. Расчет начинают с основного регулятора. Метод используют в тех случаях, когда инерционность вспомогательного канала намного меньше, чем основного.
На первом шаге принимают допущение о том, что рабочая частота основного контура (wр) намного меньше, чем вспомогательного (wpl), И при w = wр

Таким образом, в первом приближении настройки 5° основного регулятора 1 не зависят от R1(р) и находятся по Wэо(p).
На втором шаге рассчитывают настройки вспомогательного регулятора Sl1 для эквивалентного объекта (1.32) с передаточной функцией W1э(p), в которую подставляют R(p,S°).
В случае приближенных расчетов ограничиваются первыми двумя шагами. При точных расчетах их продолжают до тех пор, пока настройки регуляторов, найденные в двух последовательных итерациях, не совпадут с заданной точностью. Блок-схема алгоритма расчета приведена на рис. 1.24, а. 2-й метод. Расчет начинают со вспомогательного регулятора. На первом шаге предполагают, что внешний регулятор отключен, т. е.

Таким образом, и первом приближении настройки вспомогателыюго регулятора S1° находят по одноконтурной АСР для вспомогательного канала регулирования. На втором шаге рассчитывают настройки основного регулятора по передаточной функции эквивалентного объекта Wэ1(p) с учетом R1(p, S1°). Для уточнения настроек вспомогательного регулятора S11 расчет проводят по передаточной функции (1.32) W1эо(p), в которую подставляют R(p,S1). Расчеты проводят до тех пор, пока па-стройки вспомогательного регулятора, найденные в двух последовательных итерациях, не совпадут с заданной точностью (рис. 1.24,6).
44

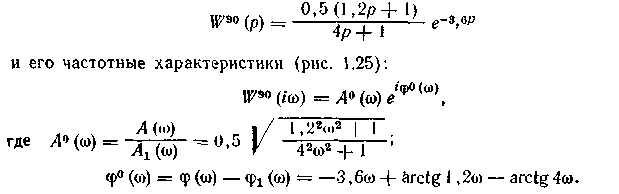
Пример. Рассчитать настройки регуляторов в каскадной АСР, если пе-pедаточный функции объекта по основному и вспомогательному каналам и передаточные функции регуляторов соответственно равны
Для расчета одноконтурных АСР используем метод Циглера — Никольса.
Из сравнения W (р) и W1(p) видно, что инерционность вспомотательного канала намного меньше, чем основного (ti
45
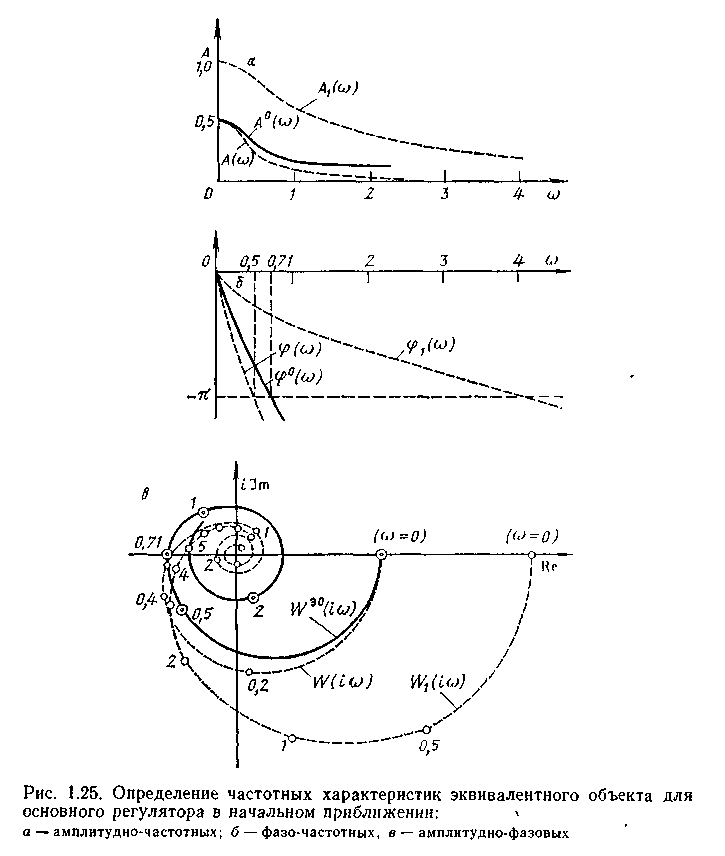
1. Расчет настроек основного регулятора (S10, S0°, (wp°). Следуя выражению (1 34), находим передаточную функцию эквивалентного объекта:
46
47
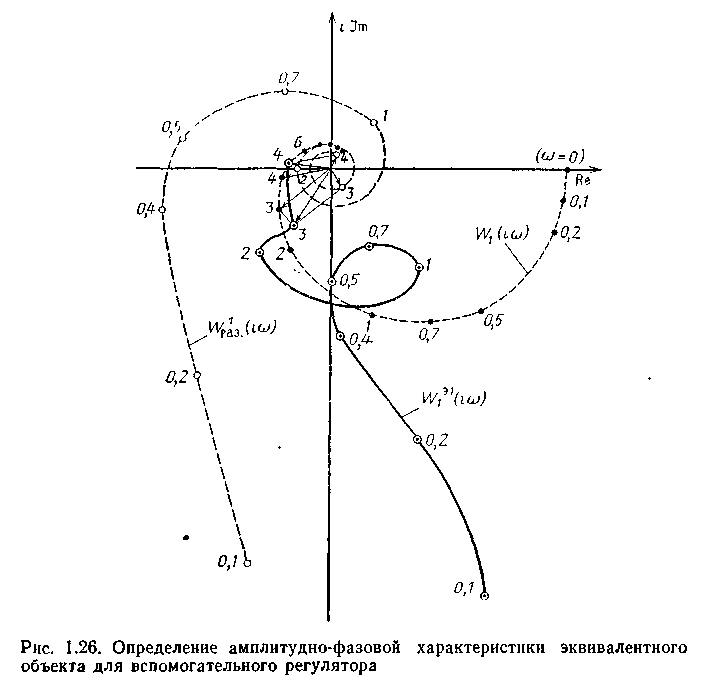
W°paз (iw) =W(iw)R(iw, S°). Критические настройки регулятора S1кр и w1 kp находим из системы уравнений:

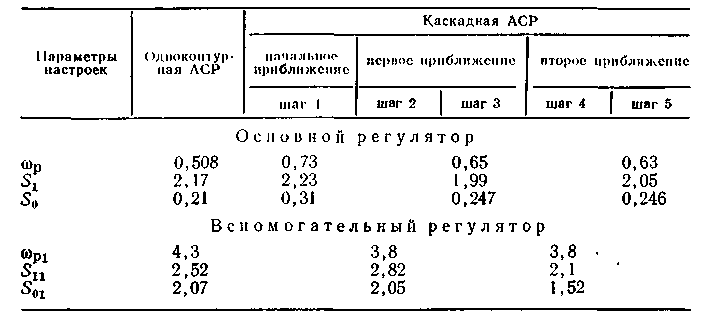
Рабочие настройки принимаем равными: S111 = 2,82; S1o1 = 2,05; w1 1p=3,8.
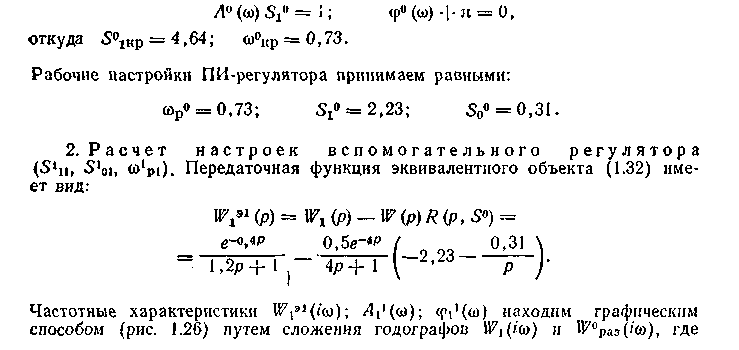
3. Уточнение настроек основного регулятора (S11, So1, (wp1). Необходимость уточнения настроек регулятора S1 возникает в том случае, если допущение (1.33) не выполняется с заданной точностью. Проверка этого условия в данном примере показывает, что

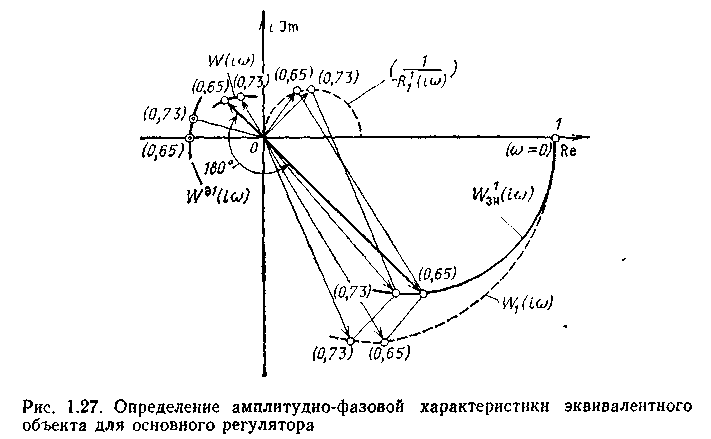
т. е. l/|R11(wp)| соизмерима с A1(wр) (если принять допустимую погрешность при выполнении условия (1.33), равную 5%) и требуется дальнейшее уточнение настроек. Поэтому по формуле передаточной функции эквивалентного объекта Wэ1 (р) находим его частотные характеристики в окрестности со = 0,73 (рис. 1.27) с учетом того, что

48
Критические и рабочие настройки регулятора 1 находим из условий

т. е. начиная с п. 2 необходимо повторить расчет.
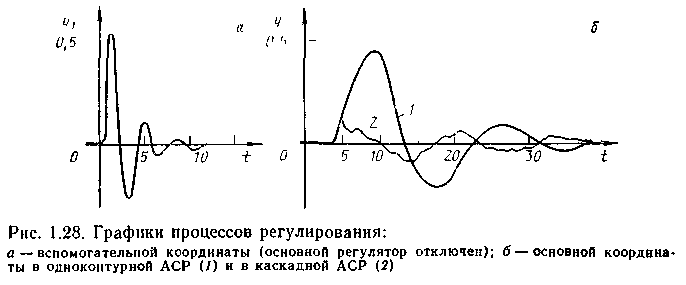
Результаты расчетов по итерациям сведены в таблицу. Их анализ показывает, что в рассмотренном примере рабочие частоты регуляторов в каскадной АСР незначительно отличаются от соответствующих частот в одноконтурных системах регулирования. При этом включение регуляторов в каскадную систему приводит к повышению рабочей частоты основного регулятора и снижению рабочей частоты вспомогательного (см. рис. 1.28, а, б). Эта особенность каскадных АСР учитывается при выборе частотного диапазона, что позволяет сократить объем вычислений при расчетах частотных характеристик эквивалентных объектов.
Окончательный вывод об эффективности применения каскадной АСР по сравнению с одноконтурной делают на основе
49
сравнительного анализа результатов моделирования переходных процессов. Для рассмотренного примера на рис. 1.28 приведены графики процессов регулирования в одноконтурной и каскадной АСР при единичном ступенчатом возмущении по каналу регулирования. Как видно из сравнения кривых 1 и 2, динамическая ошибка регулирования в каскадной АСР снизилась почти в пять, а интегральный квадратичный критерий — почти в девять раз.
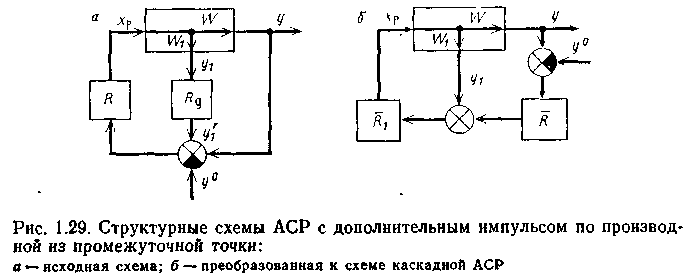
1.3.3. АСР с дополнительным импульсом по производной из промежуточной точки
Такие системы обычно применяют при автоматизации объектов, в которых регулируемый технологический параметр (например, температура или состав) распределен по пространственной координате (как в аппаратах колонного или трубчатого типа). Особенность таких объектов состоит в том, что основной регулируемой координатой является технологический параметр на выходе из аппарата, возмущения распределены по длине аппарата, а регулирующее воздействие подается на его вход. При этом одноконтурные замкнутые АСР не обеспечивают должного качества переходных процессов вследствие большой инерционности канала регулирования.
Подача на вход регулятора дополнительного импульса из промежуточной точки аппарата дает опережающий сигнал, и регулятор включается в работу прежде, чем выходная координата отклонится от заданного значения.
Для того чтобы обеспечить регулирование без статической ошибки, необходимо, чтобы в установившихся режимах дополнительный импульс исчезал. С этой целью вспомогательную координату пропускают через реальное дифференцирующее звено, так что входной сигнал регулятора равен е= у+у/1—у° (рис. 1.29,а). В установившихся режимах, когда у/1 = 0, при е = 0, y = y0.
Эффективность введения дополнительного импульса зависит от точки его отбора. Выбор последней определяется в каж-