
Рабочая учебная программа по дисциплине 4 Задания на контрольные работы
| Вид материала | Рабочая учебная программа |
- Рабочая программа, методические указания по выполнению курсовой работы и контрольные, 1000.11kb.
- Программа и контрольные задания по учебной дисциплине, 858.36kb.
- Программа и контрольные задания по учебной дисциплине «эконометрика» для студентов, 555.04kb.
- Рабочая программа методические указания контрольные задания для студентов специальности, 833.92kb.
- Программа и контрольные задания по учебной дисциплине «трудовое право» для студентов, 805.51kb.
- Программа и контрольные задания по учебной дисциплине «отечественная культура» для, 729.22kb.
- Рабочая программа По дисциплине «Стратегическое управление организацией» Для курса, 197.74kb.
- Программа и контрольные задания по учебной дисциплине «отечественная история» для студентов, 583.38kb.
- Программа, контрольные задания и тематика курсовых работ по учебной дисциплине основы, 557.3kb.
- Программа, методические указания и контрольные задания по дисциплине концепции современного, 717.75kb.
ГИПЕРБОЛА
Если уравнение имеет вид
 >0,
>0,  >0
>0кривая называется гиперболой ( каноническое уравнение гиперболы)
Точка
 - центр гиперболы, Точки (±,0)-вершины гиперболы, При
- центр гиперболы, Точки (±,0)-вершины гиперболы, При  =0,
=0,  =0,
=0,Прямые
 = ±
= ± асимптоты гиперболы.
асимптоты гиперболы. ,
,  >0. Точки (-,0) и (,0) фокусы гиперболы.
>0. Точки (-,0) и (,0) фокусы гиперболы.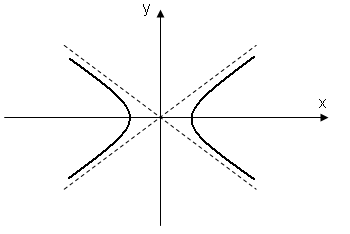
ПАРАБОЛА
Если уравнение имеет вид:
 , где
, где  >0, то линия называется параболой ( каноническое уравнение параболы) ,-координаты вершины параболы; При ==0 (
>0, то линия называется параболой ( каноническое уравнение параболы) ,-координаты вершины параболы; При ==0 ( ,0 ) - фокус параболы ; прямая
,0 ) - фокус параболы ; прямая  - директриса параболы.
- директриса параболы.На плоскости может быть введена не только декартова прямоугольная, но и полярная система координат.
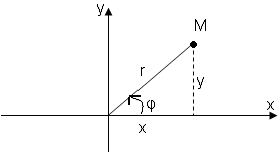
Зададим точку О -полюс, ось Z содержащую точку О и единицу длины оси Z. Возьмем произвольную точку М плоскости. Её положение на плоскости определяется двумя числами – расстоянием r от О до М (полярный радиус) и отсчитываемым против часовой стрелки углом φ между лучом OM и лучом оси (полярный угол). Если поместить начало координат декартовой прямоугольной системы в полюс, то координаты будут связаны следующим образом.
Пример 1. Пусть в задаче №3

Построим заданную линию по точкам в полярной системе координат. В начале определим область допустимых значений (ОДЗ) независимой переменной φ. По определению полярной системы координат
 и
и  .Точке r = 0 соответствует полюс 0.
.Точке r = 0 соответствует полюс 0.По условию задач угол φ может меняться от 0 до 2π. Поэтому наибольшие размеры ОДЗ таковы
 . При этом r>0 (r
. При этом r>0 (r 0), т.к. числитель соответствующей дроби 4>0. отсюда знаменатель этой дроби также должен удовлетворять неравенству 2-3cos φ > 0 или cos φ < 2/3. Решаем последнее неравенство cos φ = 2/3
0), т.к. числитель соответствующей дроби 4>0. отсюда знаменатель этой дроби также должен удовлетворять неравенству 2-3cos φ > 0 или cos φ < 2/3. Решаем последнее неравенство cos φ = 2/3  0,667;
0,667;  0,667 +2πk, k
0,667 +2πk, k N; φ =
N; φ = .
.В промежуток
 попадают два значения φ1=
попадают два значения φ1= и φ2 = -
и φ2 = - . Отсюда для
. Отсюда для  cos φ<2/3.
cos φ<2/3.Следовательно, допустимые значения φ принадлежат промежутку от 3π/8 до 13π/8, т.е. ОДЗ:
 . Результаты расчетов заносим в таблицу
. Результаты расчетов заносим в таблицу| φ | 3π/8 | π/2 | 5π/8 | 6π/8 | 7π/8 | π | 9π/8 | 10π/8 | 11π/8 | 12π/8 | 13π/8 |
| cosφ | 0.38 | 0 | -0.38 | -0.71 | -0.92 | -1 | -0.92 | -0.71 | -0.38 | 0 | 0.38 |
| r | 4.75 | 2 | 1.27 | 0.97 | 0.84 | 0.8 | 0.84 | 0.97 | 1.27 | 2 | 4.75 |
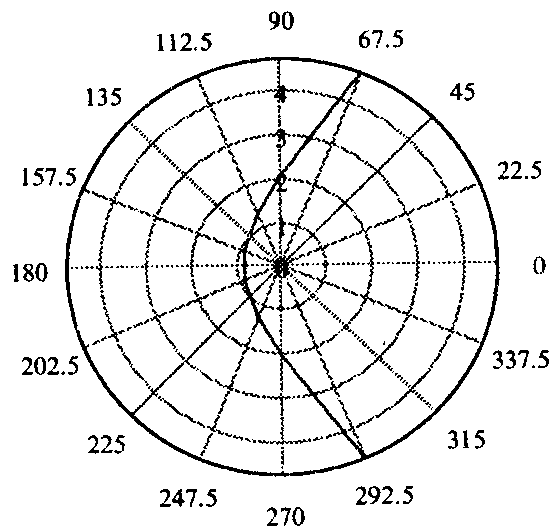 Строим чертеж ,откладывая на луче , проведенном из полюса О под определенным углом φ, соответствующие значения радиус-вектора r из таблицы
Строим чертеж ,откладывая на луче , проведенном из полюса О под определенным углом φ, соответствующие значения радиус-вектора r из таблицыrl(φ)
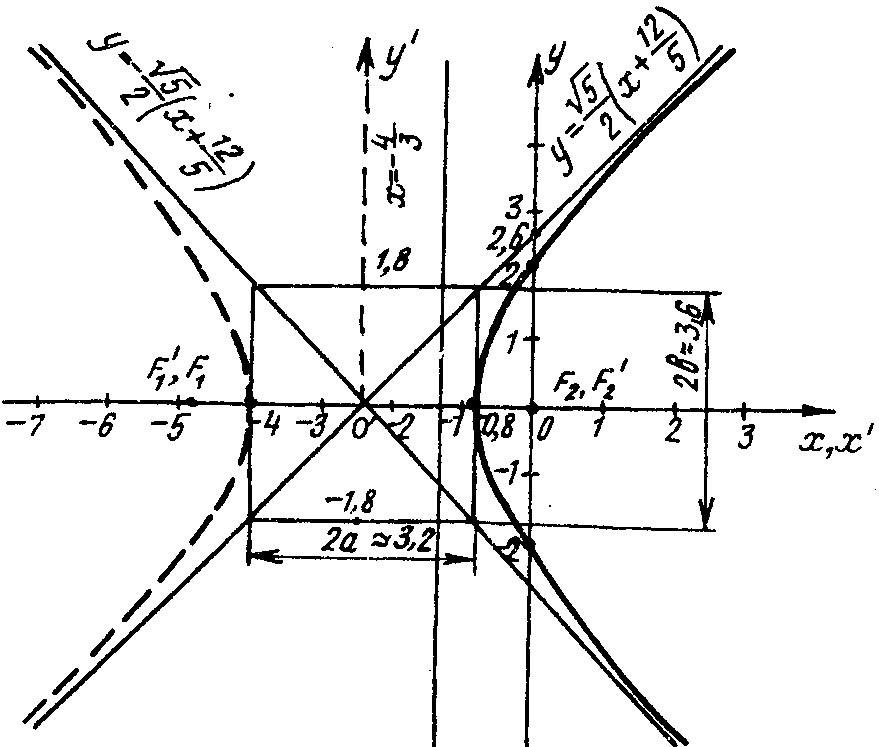
Для перехода к системе 0ху воспользуемся формулами. Имеем, следовательно - r (2-3cos φ)=4,
Определяем ОДЗ для х. Из ОДЗ : для φ
 >0.
>0.Следовательно, 3х+4>0. Отсюда ОДЗ: х>-4/3. Возводим правую и левую части равенства в квадрат и выделяем полный квадрат для переменной х:
4х2+4у2=9х2+24х+16; (5х2+24х)-4у2+16=0;
5(х2+2
 ;
;(х+12/5)2-4/5у2-144/25+16/5=0; (х+12/5)2-4у2/5=64/25
Окончательно получаем уравнение гиперболы
 х > -
х > -
с центром в точке С(-12/5;0), а = 8/5, b = 4/
 .
.Находим координаты фокусов, уравнения асимптот и эксцентриситет. Для этого систему координат 0ху параллельно перенесем в точку
 . Заменяя переменные
. Заменяя переменные  =х+12/5,
=х+12/5,  =у, получим в новой системе координат
=у, получим в новой системе координат  уравнение гиперболы с центром в
уравнение гиперболы с центром в 
Получим координаты фокусов, уравнения асимптот и эксцентриситет гиперболы:



 или
или  ,
,
Переходим в старую систему координат. Имеем:

 .
.Следовательно: F1(x;y)=F1(
 =F1(-24/5;0);
=F1(-24/5;0); F2(0;0), у = +

Совмещаем начало О системы координат Оху с полюсом, отмечаем координаты фокусов F1 и F2, проводим асимптоты и строим пунктиром левую ветвь гиперболы, т.к. точки гиперболы в полуплоскости слева от прямой х=-4/3 не удовлетворяют ОДЗ х>-4/3.
В случае если уравнение не подходит под один из перечисленных выше частных случаев линии второго порядка требование задачи «назвать линию» следует опустить.
ЗАДАНИЕ №4
Для решения задачи № 4 следует иметь понятие о базисе.
Система
 из n линейно независимых векторов в n-мерном пространстве называется базисом. Векторы
из n линейно независимых векторов в n-мерном пространстве называется базисом. Векторы  называются линейно независимыми, если равенство
называются линейно независимыми, если равенство 
(линейная комбинация этих векторов равна 0) выполняется только при нулевых значениях коэффициентов
 – всех при i=1,2…n.
– всех при i=1,2…n.Если это равенство имеет место при условии, что хотя бы один из коэффициентов
отличен от нуля, то система векторов называется линейно зависимой.В n-мерном пространстве линейно независимая система векторов не может содержать более n векторов.
Пусть задана система из n линейных уравнений с n неизвестными
Матрица системы – набор из
 чисел-коэффициентов системы, так как число строк матрицы равно числу столбцов матрица называется квадратной.
чисел-коэффициентов системы, так как число строк матрицы равно числу столбцов матрица называется квадратной.
Её определитель (для случая, когда n=3):
-определитель разложен по первой строке. Как определяются определители высших порядков, можно узнать в указанных ниже учебниках или в следующем разделе.
Итак, если определитель системы
 , то система имеет единственное решение
, то система имеет единственное решение  , которое можно найти по формулам Крамера
, которое можно найти по формулам Крамера
Где
 определитель матрицы системы, а
определитель матрицы системы, а  определитель матрицы, полученной из матрицы системы А заменой i-го столбца на столбец свободных членов
определитель матрицы, полученной из матрицы системы А заменой i-го столбца на столбец свободных членов  .
.Пример 1. Решим задачу разложения вектора по базису:
Пусть даны вектора

Решение.: Покажем в начале, что векторы
 и
и образуют базис. Система векторов образует базис, если эти векторы линейно независимы, а соответствующее векторное уравнение
образуют базис. Система векторов образует базис, если эти векторы линейно независимы, а соответствующее векторное уравнение 
Обращается в тождество только при λ1=λ2=λ3=0.
Используя координаты векторов
 , составим систему линейных уравнений, эквивалентную векторному уравнению
, составим систему линейных уравнений, эквивалентную векторному уравнению
Вычисляем определитель Δ данной системы
 =1(-1)-1(-2)=1.
=1(-1)-1(-2)=1.Так как Δ
0, то система имеет только нулевое решение (λ1,λ2,λ3) =(0,0,0). Это следует из того факта, что при bi =0 все определители при неизвестных в формулах Крамера равны нулю Δ1 = Δ2 =Δ3 = 0.Следовательно, векторы
 образуют базис.
образуют базис.Найдем координаты вектора
 в базисе
в базисе  . Четыре вектора в трехмерном пространстве всегда линейно зависимы, т.е. вектор есть линейная комбинация векторов
. Четыре вектора в трехмерном пространстве всегда линейно зависимы, т.е. вектор есть линейная комбинация векторов  .
.Аналогично предыдущему случаю составим систему уравнений для определения координат λ1,λ2,λ3 вектора
в базисе 
Определитель системы совпадает с определителем системы и не равен нулю Δ=1
0. Следовательно, система имеет единственное решение. По формулам находим λ1,λ2 и λ3


λ1=Δ1/Δ=-2/1=-2, λ2=Δ2/Δ=3/1=3, λ3=Δ3/Δ=-4/1=-4,
Итак, разложение вектора
по базису имеет вид:
Если векторы
 заданы в базисе
заданы в базисе  , то в этом базисе вектор имеет координаты
, то в этом базисе вектор имеет координаты  (2;1;3).
(2;1;3).Студенту рекомендуется самостоятельно нарисовать векторы
в пространстве R3 и сравнить полученные значения λi cо значениями, полученными графически.ЗАДАНИЕ №5
Задача №5 – это задача нахождения обратной матрицы.
Какие операции можно выполнить над матрицами?
Сложение матриц:
Умножение матрицы на число:

Умножение матриц:
Транспонирование матриц:
То есть элемент матрицы
 находящийся в позиции
находящийся в позиции  совпадает с элементом матрицы А, находящимся в позиции . Таким образом строки матрицы А переходят в столбцы , а столбцы– в строки.
совпадает с элементом матрицы А, находящимся в позиции . Таким образом строки матрицы А переходят в столбцы , а столбцы– в строки.Нахождение определителя (для квадратных матриц):
Для нахождения определителя третьего порядка мы пользовались в предыдущих задачах формулой:
 ,
,Т.е. умножили элементы первой строки на определители, которые останутся от исходного определителя третьего порядка, если вычеркнуть этот элемент вместе со своей строкой и столбцом.
Определителем матрицы n-го порядка
 называется число D
называется число D
Где
 – элементы первой строки, знак совпадает со знаком
– элементы первой строки, знак совпадает со знаком
 – минор – то есть определитель, матрицы порядка n-1, полученной вычеркиванием i-ой строки и j-го столбца.
– минор – то есть определитель, матрицы порядка n-1, полученной вычеркиванием i-ой строки и j-го столбца. Таким образом
 – формула разложения определителя по i-ой строке.
– формула разложения определителя по i-ой строке.Число
 назовем алгебраическим дополнением элемента . И тогда формулу определителя можно написать в виде:
назовем алгебраическим дополнением элемента . И тогда формулу определителя можно написать в виде:
Нахождение обратной матрицы (если
 ):
): , где
, где  – алгебраическое дополнение элемента
– алгебраическое дополнение элемента 
Для обратной матрицы
 , где Е – единичная матрица
, где Е – единичная матрица  .
.Можно построить обратную матрицу методом Жордана. Для этого следует составить расширенную матрицу (А/Е). Если подвергнуть строки этой матрицы элементарным преобразованиям (сложение и умножение на число) с целью получить на месте матрицы А единичную матрицу Е, то на месте матрицы Е получится
 – обратная к А.
– обратная к А.Пример 1. Вычислим матрицу
обратную матрице  .
.Решение. Вычисляем определитель матрицы А
Следовательно, матрица А-1 существует.
Алгебраические дополнения элементов аji исходной матрицы вычисляем по столбцам матрицы А
Записываем их в строки матрицы А-1
Делаем проверку:
 ,
,  ,
,
 ,
,
В самом деле:
Проверим наши вычисления по методу Жордана.
Составим расширенную матрицу
B =
Первый столбец
Наша цель – чтобы первый столбец выглядел так
 , т.е. надо уничтожить тройку во второй строке. Для этого первую строку умножаем на 3 и вычитаем из второй
, т.е. надо уничтожить тройку во второй строке. Для этого первую строку умножаем на 3 и вычитаем из второй
Второй столбец
Теперь надо, сделать второй столбец таким же, как второй столбец матрицы Е, т.е надо чтобы второй столбец был таким
 .
.Для этого вторую строку умножим на

 .
.Теперь надо уничтожить 2 в первой строке и 1 в третьей строке.
Умножаем вторую строку на 2 и вычитаем из первой. Результат записываем на место первой строки. Вторую строку оставляем на своем месте. Из третьей строки вычитаем вторую строку, результат записываем на место третьей строки.
 .
.Третий столбец
Третий столбец у единичной матрицы должен быть таким
 , то есть все три строки придется менять. Разделим третью строку на
, то есть все три строки придется менять. Разделим третью строку на 
 .
.Теперь уничтожим
 в первой строке. Для этого третью строку умножим на и вычтем из первой. Результат запишем на место первой строки.
в первой строке. Для этого третью строку умножим на и вычтем из первой. Результат запишем на место первой строки.
Теперь в третьем столбце от столбца единичной матрицы отличается только элемент второй строки. Это
. Чтобы на этом месте был ноль, добавим ко второй строке третью, умноженную на  . Результат впишем на место второй строки.
. Результат впишем на место второй строки. .
.Теперь сократим все дроби, где это возможно
 .
.Действительно, мы получили матрицу
 .
.ЗАДАНИЕ №6
Задача №6 – задача решения системы линейных уравнений методом Гаусса.
Пусть задана система четырех линейных алгебраических уравнений с четырьмя неизвестными х1,х2,х3,х4
Требуется найти решение (х1,х2,х3,х4) этой системы.
Перед решением системы исследуем её на совместность. По теореме Кронекера – Капелли для совместности системы необходимо и достаточно, чтобы ранг основной А и расширенной А1 матриц совпадали
r(A)=r(A1).
Система будет определенной, если ранг совместной системы равен числу неизвестных n
r(A)=n=4
Если
 , то первое уравнение системы заменяем на уравнение в котором аi1=1
, то первое уравнение системы заменяем на уравнение в котором аi1=1 По методу Гаусса с помощью эквивалентных преобразований над строками расширенную матрицу А1 системы надо привести к матрице
В которой основная матрица А принимает треугольный вид
 , т.е. на главной диагонали матрицы А все элементы равны единице, ниже – нулю. На этом прямой ход метода Гаусса заканчивается.
, т.е. на главной диагонали матрицы А все элементы равны единице, ниже – нулю. На этом прямой ход метода Гаусса заканчивается.В процессе обратного хода из матрицы
 находим значения неизвестных хi, начиная с последней x4=b45 и до первой x1=b15
находим значения неизвестных хi, начиная с последней x4=b45 и до первой x1=b15
Одновременно с прямым ходом по методу Гаусса можно определить ранги r(A) и r(A1)
Пример 1. Пусть задана система
Решение: Так как а11=0, I и IV(см. выше) уравнения системы меняем местами и записываем расширенную матрицу полученной системы
Выполняем последовательно следующие преобразования. В матрице каждый элемент I строки умножаем на (-2) и прибавляем к соответствующим элементам II строки; затем элементы I строки умножаем на (-1) и складываем с соответствующими элементами III строки. В результате получаем:
В полученной матрице элементы III строки делим на 3 и затем элементы II строки умножаем на (-1) и складываем с элементами соответственно III и IV строк:
Элементы III и IV строк нашей матрицы меняем местами; элементы III строки делим на (-1), затем умножаем на (3) и складываем с элементами IV строки
В этой матрице элементы IV строки делим на (-4)
Полученной матрице соответствует система:
Из последнего уравнения системы х4=2; из III уравнения х3=2+х4=2+2=4; из II уравнения х2=18-2х4-2х3=
 из I уравнения x1=-6+2x2+x4=-6+2·6+2=8
из I уравнения x1=-6+2x2+x4=-6+2·6+2=8Итак, решение системы равно (х1,х2,х3,х4)=(8;6;4;2).
Для избежания ошибок в решении студенту рекомендуется сделать проверку, подставив найденное решение (х1,х2,х3,х4) в каждое уравнение системы.
Найдем ранги
и 
Таким образом, определитель матрицы
треугольного вида равен произведению элементов, стоящих на главной диагонали.Поскольку отличный от нуля определитель квадратной матрицы
имеет размерность 4 х 4, то ранг матрицы равен r(А)=4.В матрице
 вычеркиваем IV столбец и определяем ранг матрицы в приведенном к треугольному виде:
вычеркиваем IV столбец и определяем ранг матрицы в приведенном к треугольному виде:
Отсюда r(
)= 4.Следовательно система совместна и определена.
ЗАДАНИЕ №7
Задача №7: Привести квадратичную форму
 к каноническому виду; найти ортонормированный базис, в котором матрица квадратичной формы имеет диагональный вид; найти матрицу перехода к ортонормированному базису.
к каноническому виду; найти ортонормированный базис, в котором матрица квадратичной формы имеет диагональный вид; найти матрицу перехода к ортонормированному базису.Квадратичной формой действительных переменных
 называется многочлен второй степени относительно этих переменных, не содержащий свободного члена и членов первой степени. Если
называется многочлен второй степени относительно этих переменных, не содержащий свободного члена и членов первой степени. Если  - квадратичная форма переменных
- квадратичная форма переменных  , а λ – какое-то действительное число, то
, а λ – какое-то действительное число, то  .
.Если n=2, то
 .
.Матрица
 у которой
у которой  , называется матрицей квадратичной формы
, называется матрицей квадратичной формы  . Т.к. А – симметричная матрица, то корни λ1 и λ2 характеристического уравнения
. Т.к. А – симметричная матрица, то корни λ1 и λ2 характеристического уравнения  являются действительными числами.
являются действительными числами.Пусть
 и
и
нормированные собственные векторы, соответствующие характеристическим числам λ1 и λ2 в ортонормированном базисе
 . В свою очередь векторы
. В свою очередь векторы  образуют ортонормированный базис. Матрица
образуют ортонормированный базис. Матрица
Является матрицей перехода от базиса
 к базису . Формулы преобразования координат при переходе к новому ортонормированному базису имеют вид:
к базису . Формулы преобразования координат при переходе к новому ортонормированному базису имеют вид:
Преобразовав с помощью этих формул квадратичную форму
 , (не содержащую членов с произведениями).
, (не содержащую членов с произведениями).говорят, что форма приведена к каноническому виду.
Пример 1. Приведем к каноническому виду квадратичную форму
 .
. ;
;  ;
;  .
.Составим характеристическое уравнение
 =0 или
=0 или  .
. ;
;  .
.Определим собственные векторы
I)

 ;
;Полагая что
 , получим
, получим  , то есть собственный вектор
, то есть собственный вектор  .
.II)
 .
.
Полагая что
 , получим
, получим  , то есть собственный вектор
, то есть собственный вектор  .
.Чтобы нормировать векторы u и v, следует принять
 .
.Итак, мы нашли нормированные собственные векторы
где
- ортонормированный базис, в котором матрица квадратичной формы имеет диагональный вид.Матрица перехода от ортонормированного базиса
к ортонормированному базису имеет вид:B=
Канонический вид квадратичной формы

ЗАДАНИЕ №8
Если в линейном пространстве R каждому вектору
 по некоторому правилу поставлен в соответствие вектор
по некоторому правилу поставлен в соответствие вектор  , то говорят, что в пространстве R задан оператор A. Оператор A называется линейным, если для любых векторов
, то говорят, что в пространстве R задан оператор A. Оператор A называется линейным, если для любых векторов  и
и  и любого действительного числа λ выполняются равенства:
и любого действительного числа λ выполняются равенства:
Значит, для того, чтобы проверить, является ли оператор A линейным надо проверить, выполняются ли эти равенства. Проверим, является ли оператор A линейным в R3 -

Возьмем два вектора
 и
и 
То есть оператор A является линейным, найдем его матрицу.
Первая координата произведения получается умножением первой строки на столбец
, то есть  , значит
, значит  ,
,  ,
, 
Вторая координата произведения:




Третья координата произведения:




Итак, матрица оператора
Найдем собственные значения линейного оператора:
(1-λ)·(1-λ)2-1·1=0
(1-λ)3=1
1-λ=1
λ=0
Оператор A имеет собственное значение λ=0 кратности 3.
Для определения координат собственного вектора получаем систему уравнений:
 положив
положив получим:
Собственному числу
 соответствует собственный вектор
соответствует собственный вектор 
ЗАДАНИЕ №9
Пример 1. Выполнить действия над комплексными числами в алгебраической форме.
Решение: Алгебраической формой комплексного числа называется следующий его вид z=x+iy. Действия над комплексными числами в алгебраической форме производятся как над многочленами вида a+xb. Специфическим приёмом деления комплексного числа на комплексное число является домножение и числителя и знаменателя на комплексно сопряжённое знаменателю число. В результате частное не изменится, но делитель будет вещественным.
Заметим что

Пример 2. Найти тригонометрическую форму числа
 . Найти:
. Найти: 
Решение :Выражение вида
 называется тригонометрической формой числа z, где модулем z называют
называется тригонометрической формой числа z, где модулем z называют  , аргументом z – угол
, аргументом z – угол  между радиус-вектором точки z и положительным направлением оси Ох.
между радиус-вектором точки z и положительным направлением оси Ох. 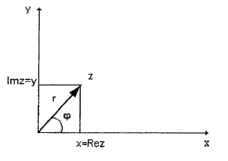

Очевидно, что если |z|r, arg z , то действительная часть числа z Re z x r cos, а мнимая часть числа z Jm z y r sin
Таким образом, в терминах модуля и аргумента комплексное число можно представить в виде
Для определения тригонометрической формы комплексного числа z найдём r,

Та как sin и cos угла
отрицательны, делаем вывод, что угол находится в III четверти 
Вычислим по формуле Муавра


120=1

Пример 3. Решить уравнение
Известно, что корнем n-степени из числа z называется любое число
 , такое, что
, такое, что  и ω имеет n различных значений.
и ω имеет n различных значений.Решение: если число z представить в тригонометрической форме
то значения
 можно представить формулой
можно представить формулой 
Поскольку все
 одинаковы, а аргументы отличаются на 2П/n, то значения
одинаковы, а аргументы отличаются на 2П/n, то значения  на комплексной плоскости располагаются в вершинах правильного n угольника. Величина
на комплексной плоскости располагаются в вершинах правильного n угольника. Величина  называется главным значением корня
называется главным значением корня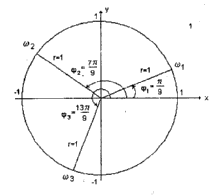
Итак, корнями уравнения будут три единичных вектора, расположенных под углом в 120 градусов друг к другу.
ЗАДАНИЕ №10
Для решения контрольной работы №2 по математике или контрольной работы №1 по математическому анализу (для специальности ЭВМ) надо изучить разделы, посвященные пределам функции одной переменной и ее производной.
Пределом функции
 при
при  называется число «а» такое, что для любого
называется число «а» такое, что для любого  можно найти такое число
можно найти такое число  , что для любого «x» из промежутка
, что для любого «x» из промежутка  будет выполняться неравенство
будет выполняться неравенство  . Имеют место следующие свойства пределов: при
. Имеют место следующие свойства пределов: при  , имеющие место и при
, имеющие место и при  :
:
если существуют и не бесконечны
 , то
, то 
и следующие замечательные пределы
Решим задачи, подобные задачам из контрольной работы:
Пример 1. Найти предел L=
Решение: Имеем неопределённость вида
 .
.Если к такой неопределённости сводится предел отношения двух многочленов, при
 следует в числителе и в знаменателе дроби вынести за скобки самую высокую входящую в них степень аргумента, а затем сократить дробь. Вынесем за скобки в числителе и знаменателе старшую степень аргумента
следует в числителе и в знаменателе дроби вынести за скобки самую высокую входящую в них степень аргумента, а затем сократить дробь. Вынесем за скобки в числителе и знаменателе старшую степень аргумента 
Так как
 и
и  при , то предел числителя при равен 3. Предел знаменателя равен 0. Следовательно, предел
при , то предел числителя при равен 3. Предел знаменателя равен 0. Следовательно, пределдроби равен
 .
.Ответ: L=