
1. Пространство и время: понятия, свойства, процедуры количественного описания Понятия пространства и времени
| Вид материала | Документы |
- А. Закон инерции, 40.83kb.
- Постмодернизм план лекции: Трудность определения понятия «постмодернизм», 404.9kb.
- Воробьева Валентина Константиновна курс лекций, 273.12kb.
- Тема «Материя и движение, пространство и время» имеет важное значение для формирования, 258.39kb.
- Тема 1 основы системной концепции: понятия, сущность, атрибуты программная аннотация, 245.29kb.
- Отребляемые в настоящее время понятия образовательного нормотворчества и образовательных, 374.72kb.
- Анатолия Васильевича Мартынова, известного широкому кругу людей по книга, 5061.34kb.
- Обеспечение производства ЭВМ базовые понятия (сапр/астпп/саит), 710.17kb.
- Факультет электронной техники, пэ-04 курсоваяработ, 220.87kb.
- Линейное пространство, 700.44kb.
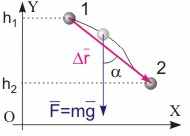 Рис. 7.5. К расчету работы в однородном поле силы тяжести | Работа в однородном поле силы тяжести. Если на частицу, помещенную в некоторую область пространства, действует сила, то она находится в поле этой силы. Сила, действующая на произвольную частицу, помещенную в поле, обусловлена ее взаимодействием с телами (частицами), индуцирующими данное поле. Пусть тело массой m перемещается из положения 1 в положение 2 в однородном поле силы тяжести. Согласно определению работа однородной силы тяжести не зависит от вида траектории равна (см. рис. 7.5): Aт = (m·g, ∆r = m·g·∆r·cos = -(m·g·h2 - m·g·h1). (7.8) Работа в однородном поле силы тяжести не зависит от формы траектории, а определяется начальным и конечным положением тела. | ||||||||
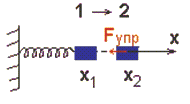 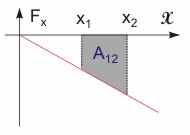 Рис. 7.6. К расчету работы силы упругости  Работа сил упругости совершается за счет деформации обода ракетки и струн. Мартина Хингис. Сидней, 2002. ava.ru/news.php | Работа силы упругости. Тело массой m, скрепленное с пружиной жесткостью k, переместилось из положения 1 в положение 2. Сила упругости, действующая на тело, изменяется по закону F = -k·x. Работа силы упругости равна площади трапеции (см. рис. 7.6). Следовательно, Aупр = -(k·x22/2 - k·x12/2). Аналогичный результат получим, проведя интегрирование силы упругости в пределах от x1 до x2:  . (7.9) . (7.9)В случае одновременного действия сил упругости и сил, вызывающих поворот пружины относительно точки ее закрепления, работа по-прежнему вычисляется с помощью соотношения (7.9), поскольку последняя из сил перпендикулярна деформации и работы не совершает. Итак, работа силы упругости определяется начальной и конечной деформацией тела (пружины) и не зависит от вида и характера его движения. Работа в поле центральных сил. Центральными называются силы, которые направлены к центру силового поля или от него и зависят только от расстояния до этого центра. Примерами центральных сил являются гравитационные силы, силы электростатического взаимодействия точечных зарядов. Вектор центральной силы F(R) можно представить как произведение его модуля F(R) на единичный вектор eR, задающий направление радиус-вектора частицы, внесенной в поле, относительно центра этого силового поля F(R) = F(R)·eR. | ||||||||
 Рис. 7.7. К расчету работы центральных сил | Рассчитаем работу в поле центральных сил. Согласно определению элементарной работы: dA = (F, dr) = F(R)·dr·cos(α) = F(R)·dR, где dR - проекция вектора перемещения на направление силы (см. рис. 7.7). Работа силы на конечном перемещении тела из положения 1 в 2 равна интегралу: 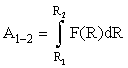 , (7.10) , (7.10)значение которого определяется видом зависимости F(R), т.е. характером взаимодействия, а также начальным и конечным положением тела и не зависит от способа перехода между этими состояниями. Для гравитационных полей, формируемых частицами или телами со сферически-симметричным распределением масс, величина работы с учетом выражения для силы гравитационного взаимодействия рассчитывается согласно формуле (7.11):  , (7.11) , (7.11)где G - гравитационная постоянная; (R, dR) - скалярное произведение векторов R и dR. Итак, мы показали, что работа в однородном поле силы тяжести, поле центральных сил и работа сил упругости не зависит от формы пути и характера движения, а определяется начальным и конечным положением тел в системе.  | ||||||||
§ 3. Консервативные силы и потенциальная энергияПотенциальная энергия функция характера взаимодействия и положения взаимодействующих тел. | |||||||||
 Рис. 7.8. К расчету работы консервативных сил по замкнутой траектории (замкнутому контуру) | Консервативные и неконсервативные силы. Силы, работа которых не зависит от формы траектории и характера движения при переходе системы из начального состояния в конечное, а определяется только взаимным положением тел системы, называются консервативными. Работа консервативных сил по замкнутой траектории равняется нулю.  . (7.12) . (7.12)Действительно, при перемещении тела из положения 1 в положение 2 работа консервативных сил одинакова вне зависимости от формы траектории A132 = A142. При обратном движении из 2 в 1 вектор силы на любом участке перемещения не зависит от направления движения тела, а направление вектора перемещения меняется на противоположное по сравнению со случаем движения по траектории 1-4-2. Следовательно, работа на конечном участке перемещения так же изменит свой знак на противоположный A241 = -A142 (см. рис. 7.8). Для любой траектории A132 + A241 = 0. Все силы, работа которых по замкнутому контуру не равняется нулю, называются неконсервативными. К неконсервативным относятся диссипативные силы. Суммарная работа всех внутренних диссипативных сил системы на любом участке траектории отрицательна в любой произвольно выбранной ИСО. Диссипативными являются силы трения, сопротивления. К диссипативным относятся все силы, которые могут быть представлены в виде: | ||||||||
| dissipation - рассеивание | F = -h(υ)·υ, где υ - относительная скорость движения тел; h(υ) - положительный коэффициент, который в общем случае может зависеть от скорости. Докажем это утверждение. Внутренние диссипативные силы встречаются в системе попарно. В соответствии с третьим законом Ньютона F1 = -F2. Элементарная работа этих сил на любом участке траектории равна: dAд = (F1, υ1·dt) + (F2, υ2·dt) = (F1, υ1·dt) - (F1, υ2·dt) = = (F1, (υ1 - υ2)·dt) = (F1, υ·dt) = -(h·υ, υ·dt) = -h·υ2·dt, где υ - скорость движения 1-го тела относительно 2-го. Поскольку все величины h и υ2 положительны, то в соответствии с полученным выражением элементарная работа произвольной пары диссипативных сил отрицательна. Следовательно, работа всех диссипативных сил на любом участке траектории также отрицательна. | ||||||||
| взаимодействие + конфигурация  Рис. 7.9. Прыжок ныряльщика. Экстремальные виды спорта. Прыжок с горы. Русский экстрим. .ru | Потенциальная энергия как функция взаимного положения тел системы. Для системы тел, в которой действуют только внутренние консервативные силы, характерна одна особенность, для установления которой воспользуемся рассмотренными выше примерами.
Потенциальная энергия для всех рассмотренных выше систем обладает одной общей особенностью – это функция взаимного положения тел системы, определяемая характером их взаимодействия. Потенциальная энергия – функция, однозначно задаваемая характером взаимодействия тел системы, которая зависит от взаимного положения этих тел. Убыль потенциальной энергии равна работе консервативных сил Акс, совершаемой при переходе системы из одного состояния в другое Акс = -Eп. Конкретный вид зависимости Eп от взаимного положения тел (конфигурации) системы определяется характером взаимодействия ее частей. Пример. Один из экстремальных видов спорта – прыжки с различных высоких объектов (гор, мостов и т. п.). При прыжке ныряльщика в воду (см. рис. 7.9) консервативная сила притяжения к Земле совершает работу, которая равна изменению потенциальной энергии спортсмена, взятой с обратным знаком. Если система находится во внешнем поле консервативных сил, то потенциальную энергию системы можно рассматривать как сумму собственной потенциальной энергии, обусловленной взаимодействием ее частей, и потенциальной энергии системы (как целого) в поле внешних консервативных сил. | ||||||||
| | Особенности потенциальной энергии:
| ||||||||
| | Связь силы и потенциальной энергии. Работа консервативных сил не зависит от формы траектории. Следовательно, потенциальная энергия, изменение которой, взятое с обратным знаком, равно этой работе, может служить характеристикой силового поля. Про тела, которые могут совершить работу, говорят, что они обладают энергией. Потенциальная энергия физическая величина, показывающая, какую работу могут совершить внутренние консервативные силы над телом. Установим связь между потенциальной энергией и силами, формирующими это потенциальное поле. Рассмотрим сначала одномерное движение частицы под действием некоторой внутренней консервативной силы Fx. Исходя из определений элементарной работы и потенциальной энергии, имеем: dA = Fxdx = -dEп. (7.16) Следовательно, Fx = -dEп/dx, т.е. проекция силы есть производная от потенциальной энергии по координате. В случае трехмерного движения каждая составляющая проекции вектора силы зависит от скорости изменения потенциальной энергии в пространстве аналогичным образом. Тогда в соответствии с принципом суперпозиции вектор силы равен градиенту Eп:  . (7.17) . (7.17)Вектор  (7.18) (7.18)называется градиентом функции f(x, y, z). f(x, y, z) - некая произвольная функция, зависящая от переменных x, y и z;  Вектор градиента направлен в сторону наиболее быстрого изменения функции. Таким образом, вектор силы равен градиенту потенциальной энергии, взятому с обратным знаком. F = -grad(Eп). (7.19) | ||||||||
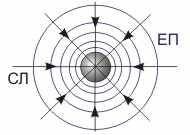 Рис. 7.10. Эквипотенциальные поверхности и силовые линии гравитационного поля симметричного тела | Графическое представление потенциального поля. Потенциальное поле можно представить в виде геометрического образа. Для этого введем понятия эквипотенциальной поверхности (ЭП) и силовой линии (СЛ). Поверхность равных значений потенциальной энергии называется эквипотенциальной. На рис. 7.17 обычно изображают какой набор эквипотенциальных поверхностей силового поля, значение потенциальной энергии между соседними поверхностями которого отличается на одну и ту же величину. Чем больше густота этих поверхностей, тем большая сила действует на частицу, помещенную в данную пространственную область (7.17). Сила, действующая на частицу, помещенную в поле, всегда перпендикулярна эквипотенциальной поверхности. Действительно, при перемещении частицы по эквипотенциальной поверхности потенциальная энергия не изменяется, а следовательно, работа не совершается. При наличии силового действия это возможно только в случае, если тангенциальная составляющая силы равняется нулю, т.е. сила направлена вдоль нормали к эквипотенциальной поверхности. Линии, касательные к которым совпадают с направлением вектора силы, называются силовыми линиями. Силовые линии перпендикулярны эквипотенциальным поверхностям. | ||||||||

