
Учебно-методический комплекс информационные ресурсы дисциплины методические указания к лабораторно-практическим работам санкт-Петербург
| Вид материала | Учебно-методический комплекс |
- Учебно-методический комплекс для студентов специальности «Реклама» Санкт-Петербург, 284.63kb.
- Методические указания к лабораторно-практическим занятиям для студентов очного и заочного, 620.25kb.
- Методика обучения изобразительной деятельности детей с проблемами в развитии Учебно-методический, 1422.44kb.
- Практикум (ч Деревообработка) Учебно-методический комплекс дисциплины Бийск бпгу имени, 1777.11kb.
- Учебно-методический комплекс по дисциплине " мировые информационные ресурсы " для специальности, 184.11kb.
- Учебно-методический комплекс по дисциплине " мировые информационные ресурсы " для специальности, 187.55kb.
- Учебно-методический комплекс по специальности: 030602. 65 Связи с общественностью Санкт-Петербург, 228.89kb.
- Учебно-методический комплекс по специальности: 030602. 65 Связи с общественностью Санкт-Петербург, 199.1kb.
- Учебно-методический комплекс по дисциплине психология искусства по направлению 521000, 624.8kb.
- Учебно-методический комплекс по специальности: 030602. 65 Связи с общественностью Санкт-Петербург, 214.6kb.
Контрольные вопросы к ЛПР №2
- С помощью каких конструктивно-схемных решений в рабочем зазоре асинхронной машины (АМ) при питании её от многофазной сети получают вращающееся (перемещающееся) магнитное поле?
- С помощью каких конструктивно-схемных решений в рабочем зазоре асинхронной машины (АМ) при питании её от однофазной сети получают вращающееся (перемещающееся) магнитное поле?
- Чем определяется направление вращения (перемещения) магнитного поля у трехфазной и однофазной асинхронной машины? Каким образом изменить направление вращения (перемещения) магнитного поля? Поясните связь угловой скорости вращения магнитного поля (синхронной частоты вращения) с частотой питающей сети и числом пар полюсов электрической машины.
- По какой причине ток холостого хода АМ всегда выше, чем ток холостого хода трансформатора?
- Благодаря каким качествам асинхронная машина стала основным типом электродвигателей, применяемых в промышленности и в быту? Назовите основные конструктивные части типовой АМ. Какие конструктивные элементы ротора и статора АМ непосредственно участвуют в процессах электромагнитного преобразования и передачи энергии?
- Какими принципиальными конструктивными особенностями отличаются АМ с фазным ротором от АМ с короткозамкнутым ротором?
- Какими стандартными обозначениями маркируются внешние выводы трехфазных обмоток статора и ротора АМ?
- Как можно практически получить режим идеального холостого хода АМ?
- Почему у асинхронных двигателей (АД) общепромышленного исполнения при прямом пуске (при отсутствии ограничивающих устройств в цепях статорной и роторной обмоток) пусковой ток ротора может достигать 5 – 7 кратных значений номинального тока, в то время как пусковой электромагнитный момент не превышает значений, равных 1,3 – 1,5 от номинального значения?
- Что означает слово «асинхронная» в названии АМ?
- Какой параметр называется скольжением АМ? Какие значения скольжения соответствуют пусковому режиму АМ (режиму стоянки «под током»)?
- Какие значения скольжения соответствуют двигательному режиму АМ? Какие значения скольжения соответствуют режиму идеального холостого хода АМ?
- Как экспериментально получить генераторный режим, параллельный с сетью (режим рекуперативного торможения) АМ? Какие значения скольжения соответствуют данному режиму?
- Как экспериментально получить режим противовключения? Какие значения скольжения соответствуют данному режиму?
- С какой скоростью магнитное поле, создаваемое обмоткой ротора АМ, вращается относительно статора и ротора? С какой скоростью магнитные поля, создаваемое обмотками статора и ротора АМ, вращаются относительно друг друга?
- Какой дополнительный параметр появляется в схеме замещения АМ при переходе от режима неподвижного к режиму вращающегося ротора?
- Приведите систему векторных уравнений электрического равновесия цепей статора и ротора АМ в соответствии с Т-образной схемой замещения.
- Приведите векторную диаграмму для асинхронной машины, работающей в двигательном режиме при симметричном включении статорной обмотки в сеть.
- Чем вызвана необходимость формирования Г-образной схемы замещения АМ? Изобразите упрощенную Г-образную схему замещения АМ.
- Что называется электромеханической характеристикой АМ? Как с помощью лабораторной установки, схема которой представлена на рис. 2.1, определить (снять) электромеханическую характеристику АМ?
- Что называется механической характеристикой АМ? Как с помощью лабораторной установки, схема которой представлена на рис. 2.1, определить (снять) механическую характеристику АМ?
- Приведите уравнения электромеханической и механической характеристик АМ. Изобразите на графике примерный вид электромеханической и механической характеристик АМ.
- Почему асинхронные двигатели чувствительнее всех других типов электродвигателей к колебаниям напряжения сети?
- Как у асинхронного двигателя увеличить пусковой момент при одновременном уменьшении пускового тока?
- Каким целям служит формула Клосса? Какие исходные данные нужны для её использования?
- На какие две принципиально отличающиеся друг от друга группы можно разделить все возможные способы регулирования выходной скорости АД?
- Какими способами можно изменить величину скольжения АД (при неизменном моменте сопротивления на валу)?
- Изобразите вид механических характеристик (относительно естественной МХ), соответствующих различным способам регулирования скорости АД.
- Как на основе сравнительного анализа графиков механических характеристик АД можно сделать вывод о сравнительной экономичности того или иного способа регулирования выходной скорости АД?
- Почему при регулировании частоты вращения АД уменьшением величины питающего напряжения появляется опасность перегрева двигателя?
- Каким основным общим недостатком с точки зрения пусковых свойств обладают АД?
- По каким причинам прямой пуск АД не всегда приемлем?
- Какие схемы включения АД соответствуют пуску при пониженном напряжении питания?
- По какой причине способ пуска АД включением активных сопротивлений в цепь ротора не всегда реализуем?
- Каким общим недостатком обладают способы пуска АД понижением на время пуска питающего напряжения?
- Почему пусковые свойства короткозамкнутого АД повышаются, если стержни роторной обмотки выполнить с высотой значительно превышающей его ширину?
ЛАБОРАТОРНО-ПРАКТИЧЕСКАЯ РАБОТА № 3.
ИССЛЕДОВАНИЕ СИНХРОННОГО ГЕНЕРАТОРА
Цель работы: Ознакомиться с устройством и принципом действия синхронной машины (СМ) в режиме генератора (СГ) и двигателя (СД), изучить основные характеристики СГ и методы их экспериментального и расчётного определения.
1. План работы:
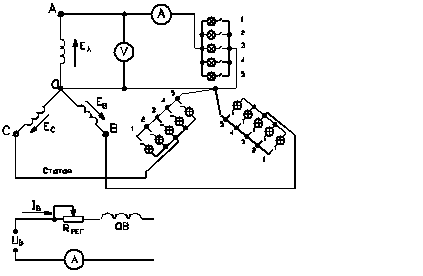
- Изучить электрическую схему лабораторной установки согласно рис.3.1.
- Изучить порядок экспериментального получения основных характеристик СГ: холостого хода, внешней и регулировочной.
- Выполнить формирование необходимых исходных данных и расчетов в соответствии с приведённой ниже программой исследования.
- Оформить отчет.
2. Программа и исходные данные для исследования
2.1. Дать описание состава и принципа действия лабораторной установки, схема которой представлена на рис.3.1.
2.2. На основании паспортных данных СМ для своего варианта (см. Табл. 3.1):
- построить векторные диаграммы для неявнополюсного (НЯП) и явнополюсного (ЯП) синхронного генератора (СГ) для номинального режима работы;
- построить угловую характеристику ЯПСГ при номинальных значениях параметров питания и сопротивлений (значение Еа определить на основании векторной диаграммы). Указать запас статической устойчивости СМ;
- определить отношение короткого замыкания (ОКЗ) ЯПСГ.

Приводной двигатель ротора (индуктора) СГ
Цепь якоря СГ
Ротор (индуктор) Кл
ПД

Цепь возбуждения
Кнг
Рис. 3.1.Схема лабораторной установки.
Таблица 3.1-1. Параметры синхронной машины
| Параметр | Вариант | ||||||||||
| | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 0 |
| Sн, кВА | 37,5 | 62,5 | 94 | 125 | 187 | 250 | 375 | 500 | 625 | 750 | 940 |
| Uн | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 | 400 |
| Cos н | 0,9 | 0,85 | 0,8 | 0,9 | 0,85 | 0,8 | 0,9 | 0,85 | 0,8 | 0,85 | 0,9 |
| nн, об/мин | 1500 | 1000 | 750 | 1500 | 1000 | 750 | 1000 | 1500 | 750 | 1000 | 1500 |
| Rа * 100 (о.е.) | 4,65 | 2,96 | 3,59 | 3,03 | 2,84 | 2,54 | 1,85 | 3,97 | 1,45 | 1,3 | 1,26 |
| Xсн,(о.е.) | 2,4 | 2,2 | 2,25 | 1,3 | 1,2 | 2,1 | 1,7 | 2,0 | 2,3 | 2,4 | 2,3 |
| Xs*10, (о.е.) | 1,08 | 0,81 | 0,89 | 0,78 | 0,76 | 0,55 | 0,52 | 0,45 | 0,98 | 0,86 | 0,91 |
| Xd, (о.е.) | 2,23 | 2,08 | 2,15 | 1,16 | 1,0 | 1,92 | 1,6 | 1,66 | 2,18 | 2,3 | 2,11 |
| Xq, (о.е.) | 1,1 | 1,04 | 1,07 | 0,58 | 0,5 | 0,96 | 0,8 | 0,85 | 1,1 | 1,15 | 1,05 |
| W1 | 18 | 14 | 12 | 16 | 20 | 18 | 14 | 16 | 20 | 18 | 14 |
где:
Sн – полная номинальная мощность;
nн - номинальная частота вращения;
Cos н – номинальный коэффициент мощности;
Uн – номинальное линейное напряжение;
Rа, Xсн, Xd, Xq, Xs – сопротивления якоря соответственно: активное, синхронное индуктивное (для случая НЯПСГ), индуктивное по продольной оси и индуктивное по поперечной осям (для случая ЯПСГ), рассеяния;
W1– число витков фазы статора;
Таблица 3.1-2. Характеристика холостого хода СГ
| Iв, (о.е.) | 0,5 | 1,0 | 1,5 | 2,0 | 2,5 | 3,0 | 3,5 |
| Eо, (о.е.) | 0,58 | 1,0 | 1,21 | 1,33 | 1,4 | 1,46 | 1,51 |
3. Порядок выполнения расчетов и расчетные формулы
(см также [1] ч.5, с.с. 13-18)
- Построение векторных диаграмм для неявнополюсного (НЯП) и явнополюсного (ЯП) синхронного генератора (СГ) для номинального режима работы.
Если пренебречь, ввиду относительной малости, величиной активного сопротивления якорной цепи (Rа << ха + хs), то расчеты можно вести с использованием упрощенных уравнений электрического равновесия и векторных диаграммм цепи якоря синхронной машины, приведенных ниже.

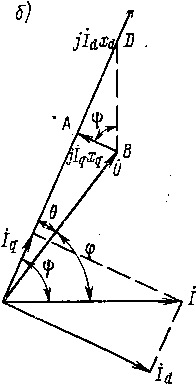
Рис. 1. Упрощенные векторные диаграммы цепи якоря неявнополюсной (а) и явнополюсной (б) синхронной машины.
На векторной диаграмме ненасыщенного неявнополюсного синхронного генератора (см. рис.1а) параметр хс называется синхронным индуктивным сопротивлением якоря, при этом:
хс = ха + хs (1)
На векторной диаграмме ненасыщенного явнополюсного синхронного генератора (см. рис.1б):
хd = хad + хs (2)
хq = хаq + хs (3)
Для случая НЯП СМ (рис. 1а) определение всех составляющих и построение векторной диаграммы очевидно и не вызывает затруднений.
Для случая ЯП СМ (рис. 1б) затруднение вызывает необходимость разложения полного тока якоря на две составляющие относительно вектора Е0: активную или поперечную Iq и индуктивную или продольную Id для чего необходимо определить положение линии, на которой находится вектор ЭДС холостого хода СГ (Е0).
Для определения положения этой линии необходимо из вершины вектора U провести перпендикулярно к вектору полного тока якоря I отрезок BD (рис. 1б), длина которого равна произведению действующего значения полного тока I на индуктивное сопротивление по поперечной оси хq, то есть:
BD = Iхq (4)
После того, как будет определено положение прямой OD, по которой направлен вектор ЭДС Е0 вектор полного тока якоря I можно разложить на поперечную Iq (совпадает по фазе с вектором Е0) и индуктивную или продольную Id (отстаёт от вектора Е0 на 900) .
Дальнейшие расчеты и построения не вызывают никаких затруднений: если к вектору U прибавить последовательно вектора Iqхq и Idхd, то получим вектор Е0, завершающий векторную диаграмму ЯП СГ.
- Построение угловой характеристики ЯПСГ в виде зависимости электромагнитного момента М от угла нагрузки при номинальных значениях параметров питания и сопротивлений выполняем на основании следующего уравнения, задаваясь произвольными значениями угла от 0 до 1800:

(5)
При этом расчеты вести удобно отдельно для активной составляющей момента М и реактивной составляющей момента М2, занося данные расчета сначала в 2 отдельные строки таблицы (табл. 3), а затем суммируя значения моментов для одних и тех же значений угла определить суммарную угловую характеристику (рис. 2).
Для определения запаса устойчивости по моменту и углу нагрузки необходимо определить по исходным данным значение номинального электромагнитного момента и нанести его значение на график угловой характеристики.
Разность между Мmax и значением номинального электромагнитного момента даст искомое значение запаса статической устойчивости СМ по моменту.
Разность между max, соответствующим Мmax и значением н, соответствующим номинальному электромагнитному моменту даст искомое значение запаса статической устойчивости СМ по углу нагрузки.
| , град | 0 | 15 | 30 | 45 | 60 | 75 | 90 | 105 | 120 | 135 | 150 | 165 | 180 |
| М | | | | | | | | | | | | | |
| М2 | | | | | | | | | | | | | |
| М | | | | | | | | | | | | | |
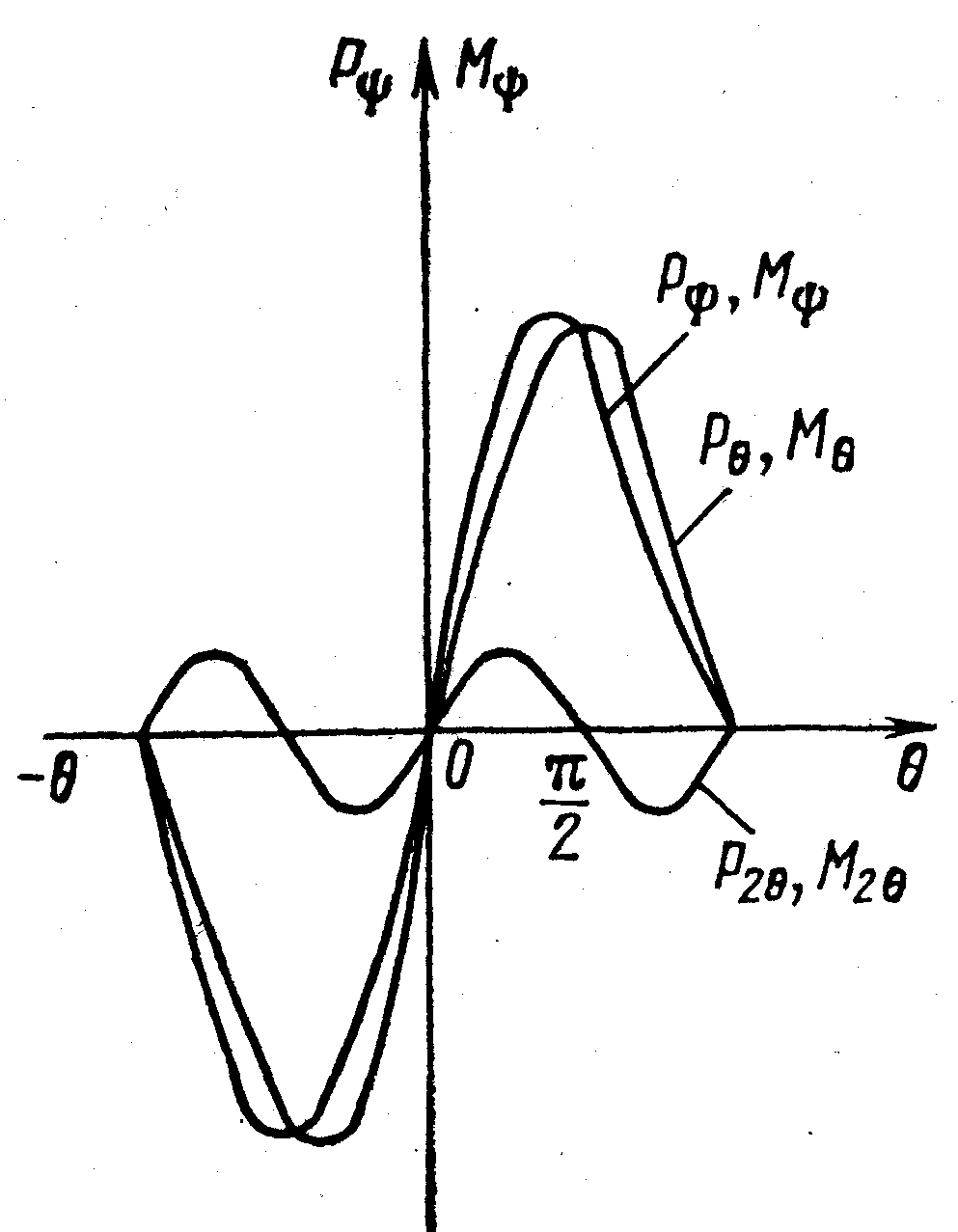
Рис. 2. Угловая характеристика явнополюсной синхронной машины.
- Отношение короткого замыкания (ОКЗ) СГ имеет важное значение для эксплуатационных свойств СГ, так как отражает перегрузочную способность СМ (см. выше уравнение угловой характеристики).
Обычно ОКЗ определяют как отношение установившегося тока симметричного короткого замыкания СГ к его номинальному току. Так как установившийся ток короткого замыкания:
Iкз уст = Uн/хd (6)
то:
ОКЗ = Uн/Iнхd = 1/ хd* (6)
где хd* - относительное значение индуктивного сопротивления по продольной оси (задано в таблице исходных данных).
Примечание: для НЯП СГ вместо хd* используется сопротивление хсн*.