
Агрегатное состояние в-ва, в к-ром его ч-цы не связаны или весьма слабо связаны силами вз-ствия и движутся свободно, заполняя весь предоставленный им объём
| Вид материала | Документы |
- 2. Молекулярно-кинетическая теория идеальных газов, 52.42kb.
- Магия и технология – за и против (или наоборот – вместе или порознь) Гилдор Карнесир, 243.69kb.
- Тема: Инновации и инновационные процессы, 158.08kb.
- Т. И. Розбицкая Музыка в жизни и творчестве И. С. Тургенева Все виды искусства так, 46.59kb.
- Ii этап Команда «исследователи» моу «сош №2», 94.86kb.
- 1 Использование ресурсов минерально-сырьевой базы края и охрана недр, 291.61kb.
- Позиционирования (gps), 196.2kb.
- Конспект тема: Бизнес план и его роль в современном предпринимательстве, 598.08kb.
- Задания для второго (районного, городского) этапа Всероссийской олимпиады школьников, 68.78kb.
- Курсовые работы на III и IV курсах обязательно должны быть связаны, 86.91kb.
к-рая принципиально отличается от конструкций газоструйных излучателей, т. к., во-первых, вытекание жидкости из сопла со сверхзвук. скоростью осуществить невозможно, а во-вторых, использование резонирующего объёма для Г. и. неэффективно ввиду относительно невысокого коэфф. отражения звука на границе жидкость — металл.
Наибольшее распространение получили пластинчатые Г. и., состоящие из погруженных в жидкость прямоугольного щелевого сопла (рис. 1) и заострённой в сторону струи пластинки, к-рая крепится в узловых точках (рис. 1, а) либо консольно (рис. 1, б).
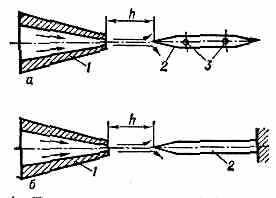
Рис. 1. Принципиальная конструкция пластинчатых гидродинамич. излучателей с креплением пластинки: о — в узловых точках; б — консольно; 1 — сопло; 2 — пластинка; 3 — точки крепления (узлы колебаний).
При натекании на пластинку потока жидкости в ней возбуждаются изгибные колебания. Для генерирования интенсивных колебаний необходимо, чтобы собств. частота пластинки и частота автоколебаний струи совпадали. В другой модификации Г. и. используется кольцевое щелевое сопло, образованное двумя конич. поверхностями, а колеблющимся препятствием служит полый цилиндр, к-рый разрезан вдоль образующих, так что создаётся система расположенных по окружности консольных пластин.
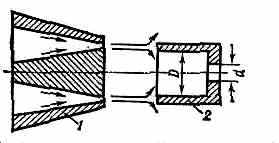
Рис. 2. Конструкция пластинчатого гидродинамич. излучателя с кольцевым соплом 1 и расположенными по окружности консольными пластинками 2 (D — диаметр цилиндра, d — диаметр отверстия в его дне).
Излучение Г. и. возможно также за счёт пульсации кавитац. полости, образующейся между соплом и препятствием. В этом случае интенсивность колебаний определяется соотношением диаметра сопла и диаметра лунки на торце отражателя. Существуют также роторные Г. и., работа к-рых подобна работе сирен и сводится к периодич. прерыванию струи жидкости.
Г. и. излучают акустич. колебания в широком частотном диапазоне — от 0,3 до 35 кГц с макс. интенсивностью порядка 1,5—2,5 Вт/см2. Г. и.
применяются для интенсификации разл. технол. процессов: приготовления высококачеств. эмульсий из несмешивающихся друг с другом жидкостей, диспергирования тв. ч-ц в жидкостях, ускорения процессов кристаллизации в р-рах, расщепления молекул полимеров, очистки стального литья после прокатки и т. д.
• Константинов Б. П., Гидродинамическое звукообразование и распространение звука в ограниченной среде, Л., 1974; Ультразвук, М., 1979 (Маленькая энциклопедия).
А. Ф. Назаренко.
ГИДРОДИНАМИЧЕСКОЕ СОПРОТИВЛЕНИЕ (гидравлическое сопротивление), сопротивление движению тела со стороны обтекающей его жидкости или сопротивление движению жидкости, вызванное влиянием стенок труб, каналов и т. д. При обтекании неподвижного тела потоком жидкости (газа) или, наоборот, когда тело движется в неподвижной среде, Г. с. представляет собой проекцию гл. вектора всех действующих на тело сил на направление движения. Г. с.
Х=Сx (v2/2)S, где — плотность
среды, v — скорость, S — характерная для данного тела площадь. Г. с, летат. аппаратов наз. аэродинамическим сопротивлением.
Безразмерный коэфф. Г. с. Сx зависит от формы тела, его положения относительно направления движения и подобия критериев. Силу, с к-рой жидкость действует на каждый элемент поверхности движущегося тела, можно разложить на нормальную и касат. составляющие, т. е. на силу давления и силу трения. Проекция результирующей всех сил давления на направление движения даёт Г. с. давления, а проекция результирующей всех сил трения на направление движения — Г. с. трения. Тела, у к-рых сопротивление от сил давления мало по сравнению с сопротивлением от сил трения, считаются хорошо обтекаемыми. Г. с. плохо обтекаемых тел определяется почти полностью сопротивлением давления. При движении тел вблизи поверхности раздела двух сред образуются волны, в результате чего возникает волновое сопротивление.
При протекании жидкости по трубам, каналам и т. д. в гидравлике различают два вида Г. с.: сопротивление трения, прямо пропорц. длине участка потока, и местные гидравлич. сопротивления, связанные с изменением структуры потока (отрывы, вихреобразование) на коротком участке при обтекании разл. препятствий (в виде клапанов, задвижек и др.), а также при внезапном расширении или сужении потока или при изменении направления его течения. В гидравлич. расчётах Г. с. оценивается величиной «потерянного» напора hv, представляющего собой ту часть уд.
119
энергии потока, к-рая необратимо расходуется на работу сил сопротивления.
Определение величины Г. с. имеет большое значение при проектировании и постройке самых разнообразных гидротехн. сооружений, установок и аппаратов (турбинные установки, воздухо- и газоочистит. аппараты, газо-, нефте- и водопроводные магистрали, компрессоры, насосы и т. д.).
• Идельчик И. Е., Справочник по гидравлическим сопротивлениям, 2 изд., М., 1975.
ГИДРОЛОКАТОР, гидроакустич. устройство для определения положения подводных объектов при помощи звук. сигналов. Существуют разл. принципы действия Г. (см. Гидролокация),
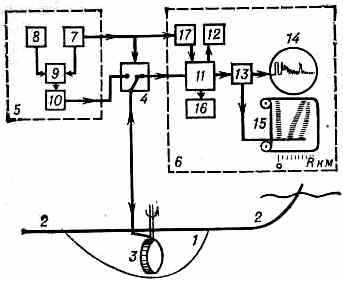
Блок-схема гидролокатора.
но наиб. распространены импульсные Г. (рис.). Излучение импульса акустического на фиксированной звук. или ультразвук. частоте и приём отражённого от лоцируемого объекта эхо-импульса в таком Г. производится посредством направленной приёмно-излучающей гидроакустич. антенны 3, состоящей из набора электроакустических преобразователей и расположенной в обтекателе 1, прикреплённом к днищу корабля 2. Поворотное устройство позволяет устанавливать антенну в произвольном положении в горизонт. плоскости и производить поиск по азимуту. Реле приёма — передачи 4 подключает антенну поочерёдно к передающему 5 и приёмному 6 трактам. В режиме излучения электрич. импульс, сформированный в модуляторе 9 (куда подаётся сигнал звук. или ультразвук. частоты от генератора 8 и видеоимпульс от формирователя 7), после усиления в усилителе мощности 10 поступает на преобразователи антенны, к-рые излучают в воду акустич. сигнал длительностью 10—100 мс. В режиме приёма отражённые звук. сигналы, принятые преобразователем 3, усиливаются приёмным усилителем 11 и подаются на блок слухового контроля 12 и одновременно после детектора 13 — на электронно-лучевой индикатор 14 и регистратор 15. При равномерном движении цели отметки
на ленте регистратора, соответствующие последовательным отражениям, располагаются на прямолинейной «трассе»; по наклону этой прямой можно определить скорость движения цели. Определение скорости цели по единичной посылке производится на основе Доплера эффекта с помощью дополнит. тракта 16. Для согласования динамич. диапазонов принимаемых сигналов и регистрирующей аппаратуры служит блок регулировки 17.
По способу обзора пр-ва различают Г. шагового поиска, секторного поиска и кругового обзора. При шаговом поиске и пеленговании антенна Г. поворачивается в горизонт. плоскости на угол 2,5—15°. При секторном поиске акустич. энергия излучается в определ. секторе, а приём и пеленгование производятся путём быстрого сканирования в пределах этого сектора. При круговом обзоре используется ненаправленное излучение и направленный приём при помощи антенны с веерной хар-кой направленности; это обеспечивает обнаружение и пеленгование всех окружающих Г. объектов. ГИДРОЛОКАЦИЯ (от греч. hydor — вода и лат. locatio — размещение), определение положения подводных объектов при помощи акустич. сигналов, излучаемых самими объектами (пассивная локация) или возникающих в результате отражения от подводных объектов искусственно создаваемых звук. сигналов (активная локация). Г. имеет большое значение в навигации для обнаружения невидимых подводных препятствий, в рыбном промысле для обнаружения косяков и отд. крупных рыб, в океанологии как инструмент исследования физ. св-в океана, картографирования морского дна, поиска затонувших судов и т. п. Г. применяется также в военных целях для обнаружения подводных лодок, надводных кораблей и др. и наблюдения за ними, для определения координат целей при применении торпедного и ракетного оружия.
При пассивной локации (шумопеленгации) с помощью шумопеленгатора определяют направление на источник звука (пеленг источника), пользуясь звук. полем, создаваемым самим источником. При этом применяют разл. методы: поворачивают приёмную акустич. антенну с острой направленностью до положения, в к-ром принятый сигнал имеет макс. интенсивность (т. н. макс. метод пеленгования); измеряют разность фаз между сигналами на выходе двух разнесённых в пр-ве антенн (фазовый метод); определяют относит. разницу во времени приёма сигналов двумя разнесёнными антеннами посредством измерения взаимной корреляции (корреляц. метод), а также путём комбинации этих методов. Расстояние до объекта определяют по двум или неск. пеленгам, полученным неск. приёмными
системами, разнесёнными на расстояния, сравнимые с расстоянием до лоцируемого объекта (метод триангуляции); так определяется не только положение шумящего объекта, но и траектория его движения. Системы пассивной Г. применяются гл. обр. для гидроакустич. оснащения подводных лодок и надводных кораблей. Пассивной Г. пользуются также при обнаружении подводных шумящих объектов с помощью распределённых береговых и донных систем звукоприёмников, данные от к-рых по подводному кабелю передаются на береговые системы обработки, а также с помощью системы гидроакустич. радиобуев, информация от к-рых принимается по радиоканалу спец. самолётами, курсирующими в районе плавания буёв.
Если источник звука излучает короткий звук. импульс, то положение источника можно определить по разностям времён прихода импульсов, принятых ненаправленными приёмниками в трёх или более разнесённых по пр-ву пунктах. Таким способом определения местоположения источников пользуются в береговой системе дальнего обнаружения судов, терпящих бедствие в открытом океане (система СОФАР); источником звука при этом служит взрыв заряда, погружаемого на определ. глубину.
Системы активной Г. основаны на явлении звук. эха (рис. 1) и различаются методами модуляции (см. модуляция колебаний) посылаемого сигнала и способами обзора пр-ва.
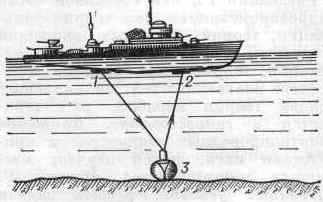
Рис. 1. Принцип работы гидролокатора: 1 — излучатель; 2 — приёмник; 3 — отражающее тело.
Для определения дальности объекта чаще всего пользуются амплитудной и частотной модуляциями сигнала. При амплитудной импульсной модуляции расстояние R до цели находится по времени запаздывания t0 отражённого импульса: R=ct0/2, где с — скорость распространения звука в среде. При частотной модуляции частота / излучаемого сигнала меняется со временем t по линейному закону f(t)=f0+t, где t0 и — постоянные начальная частота и скорость изменения частоты. Отражённый сигнал, принятый приёмником 3 (рис. 2, а), отличается по частоте от сигнала, излучаемого в данный момент (рис. 2, б), т. к. принятый сигнал (рис. 2, в) представляет собой задержанную на время tc копию посланного сигнала, а частота излучаемого сигнала за
120
время tс изменилась согласно приведённой ф-ле. Для неподвижной цели разность частот постоянна и равна: f- =tс (рис. 2, г). Выделив разностную частоту, определяют расстояние до цели R=сf-/2. Аналогична схема действия гидролокатора с шумовым излучением и корреляц. обработкой сигнала.
Осн. хар-кой гидролокаторов явл. дальность обнаружения, к-рая зависит от мощности излучаемого сигнала, от уровня акустич. помех и от условий распространения звука в водной среде. Её обычно определяют по величине т. н. порогового сигнала, т. е. сигнала мин. интенсивности, ещё различимого на фоне помех.
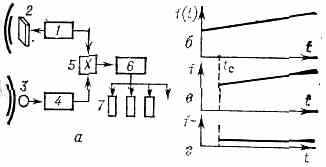
Рис. 2. а — блок-схема гидролокатора с частотной модуляцией: 1 — генератор, 2 — излучатель, 3 — приёмник, 4 — усилитель, 5 — смеситель, 6 — детектор, 7 — фильтр; б — посланный сигнал; в — принятый сигнал; г — принятый сигнал для неподвижной цели.
Наряду с помехами на дальность обнаружения оказывает влияние рефракция звука, имеющая место в сложных гидрол. условиях. Совр. гидролокаторы способны обнаруживать большие отражающие объекты в среднем на расстоянии неск. км.
• Сташкевич А. П., Акустика моря, Л., 1966; Тюрин А. М., С т а ш к е в и ч А. П., Таранов Э. С., Основы гидроакустики, Л., 1966.
Б. Ф. Курьянов.
ГИДРОМЕХАНИКА (от греч. hydor — вода и механика), раздел механики, в к-ром изучается движение и равновесие практически несжимаемых жидкостей. Соотв. подразделяется на гидродинамику и гидростатику. Часто под термином «Г.» подразумевают гидроаэромеханику в целом.
ГИДРОСТАТИКА (от греч. hydor — вода и статика), раздел гидроаэромеханики, в к-ром изучается равновесие жидкости и воздействие покоящейся жидкости на погружённые в неё тела. Одна из осн. задач Г.— изучение распределения давления в жидкости. Зная распределение давления, можно на основании законов Г. рассчитать силы, действующие со стороны покоящейся жидкости на погружённые в неё тела, напр. на подводную лодку, на стенки и дно сосуда, на стену плотины. В частности, можно вывести условия плавания тел на поверхности или внутри жидкости, а также выяснить, при каких условиях плавающие тела будут обладать устойчивостью, что особенно важно в кораблестроении. На законах Г., в частности на Паскаля законе, основано действие гидравлич. пресса, гидравлнч. аккумулятора, жидкостного манометра, сифона и мн. др. машин и приборов. Один из осн. законов Г.— Архимеда закон определяет величину выталкивающей силы, действующей на тело, погружённое в жидкость или газ.
• Элементарный учебник физики, под ред. С. Ландсберга, 9 изд., М., 1975; X а й к и н С. Э., Физические основы механики, 2 изд., М., 1971.
ГИДРОСТАТИЧЕСКИЙ ПАРАДОКС, заключается в том, что вес жидкости, налитой в сосуд, может отличаться от силы давления, оказываемой ею на дно сосуда. Так, в расширяющихся кверху сосудах (рис.) сила давления на дно меньше веса жидкости, а в суживающихся — больше. В цилиндрич. сосуде обе силы одинаковы. Если одна и та же жидкость налита до одной и той же высоты в сосуды разной формы, но с одинаковой площадью дна, то, несмотря на разл. вес налитой жидкости, сила давления на дно одинакова для всех сосудов и равна весу жидкости в цилиндрич. сосуде.
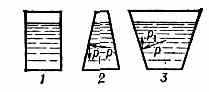
Это следует из того, что давление покоящейся жидкости зависит только от глубины под свободной поверхностью и от плотности жидкости. Объясняется Г. п. тем, что поскольку гидростатич. давление р всегда нормально к стенкам сосуда, сила давления на наклонные стенки имеет вертик. составляющую р1, к-рая компенсирует вес излишнего по сравнению с цилиндром 1 объёма жидкости в сосуде 3 и вес недостающего объёма жидкости в сосуде 2. Г. п. обнаружен франц. учёным Б. Паскалем (1654).
ГИДРОСТАТИЧЕСКОЕ ВЗВЕШИВАНИЕ, метод измерения плотности жидкостей и тв. тел, основанный на законе Архимеда (см. Архимеда закон). Плотность тв. тела определяют его двукратным взвешиванием — сначала в воздухе, а затем в жидкости, плотность к-рой известна (обычно в дистиллиров. воде).
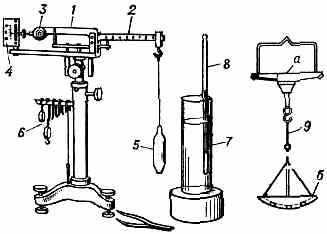
Гидростатич. весы ВГ-2: 1 — неравноплечное коромысло; 2 — шкала в виде поперечных надрезов для гирь; 3 — неподвижный противовес; 4 — шкала указателя равновесия; 5 —стеклянный поплавок; 6 — гири-рейтеры; 7 — сосуд с жидкостью; 8 — термометр; 9 — двойная чашка для помещения тв. тел (верхняя а — сплошная, нижняя б — с отверстиями, её погружают в воду).
При первом взвешивании определяется масса тела, по разности результатов обоих взвешиваний — его объём. При измерении плотности жидкости в ней взвешивают к.-н. тело (обычно стеклянный поплавок), масса и объём к-рого известны. Г. в., в зависимости от требуемой точности, производят на техн., аналитич. или образцовых весах. При массовых измерениях широко применяют менее точные, но более быстродействующие спец. гидростатич. весы, напр. весы Мора (их конструкцию предложил в 1849 нем. химик К. Ф. Мор).
• К и в и л и с С. С., Техника измерения плотности жидкостей и твердых тел., М., 1959, гл. 4.
С. С. Кивилис.
ГИДРОФИЛЬНОСТЬ И ГИДРОФОБНОСТЬ (от греч. hydor — вода, phileo — люблю, phobos — боязнь, страх), понятия, характеризующие сродство тв. тела к воде, обусловленное силами межмолекулярного взаимодействия и обнаруживающееся в явлениях смачивания. Г. и г.— частный случай лиофильности и лиофобности — хар-к мол. вз-ствия в-в с разл. жидкостями. Г. и г. можно оценить по растеканию капли воды на гладкой поверхности тела, т. е. по его смачиванию. На гидрофильной поверхности капля растекается полностью, а на гидрофобной — частично, причём величина угла между поверхностями капли и тв. тела (см. рис. 1 в ст. Смачивание) зависит от того, насколько данное тело гидрофобно. Общей мерой гидрофильности служит энергия связи молекул воды с поверхностью тела; её можно определить по теплоте смачивания, если в-во тв. тела нерастворимо в данной жидкости. Гидрофильны все тела, интенсивность молекулярных (атомных, ионных) вз-ствий к-рых достаточно велика. Особенно резко выражена гидрофильность минералов с ионными крист. решётками (напр., карбонатов, силикатов, сульфатов, глин), а также силикатных стёкол. Гидрофобны металлы, лишённые окисных плёнок, органич. соединения с преобладанием углеводородных групп в молекуле (напр., парафины, жиры, воски, нек-рые пластмассы), графит, сера и др. в-ва со слабым межмолекулярным взаимодействием.
Понятия Г. и г. применимы не только к телам или их поверхностям, но и к единичным молекулам или отд. частям молекул. Так, в молекулах поверхностно-активных веществ различают гидрофильные (полярные) и гидрофобные (углеводородные) группы. Гидрофильность поверхности тела может резко измениться в результате адсорбции таких в-в. Повышение гидрофильности наз. г и д р о ф и л и з а ц и е й, а понижение — г и д р о ф о б и з а ц и е й.
121
В-ва могут быть отнесены к гидрофильным или гидрофобным по их способности к гидратации — присоединению отд. молекулами в-ва молекул воды, к-рое часто приводит к образованию соединений определ. состава — гидратов. Напр., белки, углеводы, крахмал — гидрофильны, т. к. набухают и коллоидно растворяются в воде, а каучуки и др. полимеры — гидрофобны.
ГИДРОФОН (от греч. hydor — вода и phone — звук), гидроакустич. звукоприёмник. Г. явл. электроакустическими преобразователями и применяются в гидроакустике для прослушивания подводных сигналов и шумов, для измерит. целей, а также как составные элементы направленных гидроакустич. антенн. Наиболее распространены Г., основанные на пьезоэлектрич. эффекте; используются также Г. электродинамич. и магнитострикц. типа. Принимаются спец. меры по обеспечению герметичности и защиты чувствит. элементов от действия гидростатич. давления и действия воды.
Пьезоэлектрич. Г. основан на прямом пьезоэффекте (см. Пьезоэлектричество) нек-рых кристаллов (сегнетова соль, дигидрофосфат аммония, сульфат лития и др.). Широко используются пьезокерамика и керамики на основе титаната-цирконата свинца. Чувствит. элементы пьезоэлектрич. Г. изготовляют в виде полых цилиндров или сфер из пьезокерамики или в виде набора пьезоэлектрич. пластинок. Магнитострикц. Г. основаны на обратном магнитострикц. эффекте (см. Магнитострикция) нек-рых металлов (в осн. Ni и его сплавов). Для избежания потерь на вихревые токи их чувствит. элементы (сердечники) изготовляют, как правило, из тонких пластин.
Г., предназначенные для измерит. целей, должны быть ненаправленными и обладать ровной частотной хар-кой во всей области исследуемых частот. Для этой цели удобно пользоваться малыми по сравнению с длиной волны полыми сферич. приёмниками из пьезокерамики, совершающими сферически симметричные колебания.
Одна из важнейших хар-к Г.— чувствительность (в мкВ/Па), отношение электрич. напряжения к звук. давлению. Для увеличения чувствительности (а также устранения шунтирующего действия кабеля) пользуются Г. с предварит. усилителями, к-рые монтируются в одном корпусе с приёмником.
• Т ю р и н А. М., С т а ш к е в и ч А. П., Таранов Э. С., Основы гидроакустики, Л., 1966.