
Исследование переходных процессов в замкнутых нелинейных системах управления 111
| Вид материала | Исследование |
- Вторая Международная научная конференция моделирование нелинейных процессов и систем, 145.53kb.
- Лабораторная работа №1 2 исследование переходных процессов, 92.12kb.
- Природа явлений в нелинейных цепях гораздо сложнее и многообразнее чем в линейных, 149.95kb.
- Расчет параметров автоколебательных процессов в нелинейных системах автоматического, 442.41kb.
- О новом поколении компьютерных лабораторных практикумов по электрофизике, 9.71kb.
- Применение среды labview для исследования переходных процессов в нелинейных цепях, 52.55kb.
- Моделирование переходных электромеханических процессов в пвк анарэс, 55.75kb.
- Переходные процессы в электрических системах рабочая программа, методические указания., 137.38kb.
- Лекция №4. Операторный метод расчета переходных процессов, 59.84kb.
- Курс: Регулярная и хаотическая динамика нелинейных систем, 278.41kb.
ЛАБОРАТОРНАЯ РАБОТА N9 ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЗАМКНУТЫХ НЕЛИНЕЙНЫХ СИСТЕМАХ УПРАВЛЕНИЯ 111
Порядок выполнения работы 111
Теоретические сведения 112
Контрольные вопросы 117
Содержание отчета 118
Задания 118
ЛАБОРАТОРНАЯ РАБОТА N10 ИССЛЕДОВАНИЕ АВТОКОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ В ЗАМКНУТЫХ НЕЛИНЕЙНЫХ СИСТЕМАХ ПРИБЛИЖЕННЫМИ МЕТОДАМИ 120
Порядок выполнения работы 120
Теоретические сведения 121
Пример выполнения 125
Контрольные вопросы 128
Содержание отчета 128
Задание 129
ЛАБОРАТОРНАЯ РАБОТА N11 ИССЛЕДОВАНИЕ КАЧЕСТВА РЕГУЛИРОВАНИЯ В ЗАМКНУТЫХ ЛИНЕЙНЫХ СИСТЕМАХ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ 130
Порядок выполнения работы 130
Теоретические сведения 132
Пример моделирования случайных процессов в линейных системах 136
Контрольные вопросы 143
Содержание отчета 144
Задания 144
ЛАБОРАТОРНАЯ РАБОТА N9 ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ В ЗАМКНУТЫХ НЕЛИНЕЙНЫХ СИСТЕМАХ УПРАВЛЕНИЯ
Цели работы: закрепление теоретических сведений по динамике систем с нелинейными звеньями, приобретение навыков исследования процессов в нелинейных замкнутых системах автоматического управления и оценки их устойчивости по фазовым траекториям.
Порядок выполнения работы
Для объекта с передаточными функциями (6.1) – (6.3), заданного преподавателем, ПИД-регулятора с передаточной функцией
 (8.1)
(8.1)и нелинейного звена (см. рис.8.1-8.5) провести исследование влияния коэффициентов регулятора и параметров нелинейного звена на характер переходных процессов и фазовые портреты замкнутой системы.
 |  |
 | |
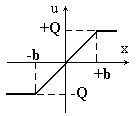
| Рис.8.1. Звено насыщения | |
| | |
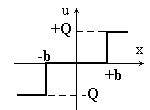 |  |
| Рис.8.2.Идеальное трехпозиционное реле | |
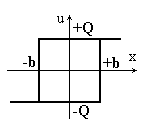
Рис.8.3. Двухпозиционное реле с зоной нечувствительности
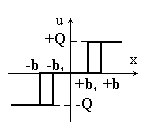
Рис.8.4. Трехпозиционное реле с зоной нечувствительности
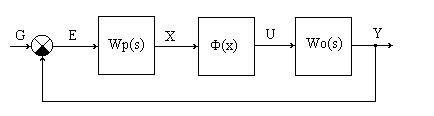
Рис.8.5. Структурная схема нелинейной замкнутой системы
Теоретические сведения
При исследовании замкнутых систем автоматического регулирования с нелинейными звеньями обычно составляют систему уравнений, которую решают аналитически или численно.
Так для схемы рис.8.5 с ПИД-регулятором, апериодическим звеном второго порядка и нелинейным звеном с характеристикой рис. 8.3 система уравнений имеет следующий вид:

Во временной области система может быть записана как:


Для решения системы уравнений можно перейти к конечным разностям.



Решать систему конечно-разностных уравнений при соответствующих параметрах и начальных условиях можно с помощью программного блока, занося все результаты в матрицу А, например:
















Для постоянных параметров объекта и нелинейного звена в описание функции эти параметры можно не включать.
О

бращение к функции вычисления переходных процессов производится оператором присваивания
Поскольку вычисления производились со второй точки, начало матрицы следует заполнить начальными значениями








Т
аблица расчетов приведена ниже, причем, в первую колонку занесены значения у, во вторую – е, в третью – х, и в четвертую – u.
i
:=2..1000
Рис.8.6. Графики переходных процессов для соответствующих сигналов
Для построения фазовой траектории приближенное значение производной можно вычислить по формуле
Ф
азовая траектория для указанных выше начальных условий: имеет вид:
Р
ис.8.7.Фазовая траектория для замкнутой системы
Для другого набора параметров регулятора моделирование проводится аналогичным образом.