
Исследование переходных процессов в замкнутых нелинейных системах управления 111
| Вид материала | Исследование |
СодержаниеЛабораторная работа n10 исследование автоколебательных процессов в замкнутых нелинейных системах приближенными методами Порядок выполнения работы Теоретические сведения |
- Вторая Международная научная конференция моделирование нелинейных процессов и систем, 145.53kb.
- Лабораторная работа №1 2 исследование переходных процессов, 92.12kb.
- Природа явлений в нелинейных цепях гораздо сложнее и многообразнее чем в линейных, 149.95kb.
- Расчет параметров автоколебательных процессов в нелинейных системах автоматического, 442.41kb.
- О новом поколении компьютерных лабораторных практикумов по электрофизике, 9.71kb.
- Применение среды labview для исследования переходных процессов в нелинейных цепях, 52.55kb.
- Моделирование переходных электромеханических процессов в пвк анарэс, 55.75kb.
- Переходные процессы в электрических системах рабочая программа, методические указания., 137.38kb.
- Лекция №4. Операторный метод расчета переходных процессов, 59.84kb.
- Курс: Регулярная и хаотическая динамика нелинейных систем, 278.41kb.
ЛАБОРАТОРНАЯ РАБОТА N10 ИССЛЕДОВАНИЕ АВТОКОЛЕБАТЕЛЬНЫХ ПРОЦЕССОВ В ЗАМКНУТЫХ НЕЛИНЕЙНЫХ СИСТЕМАХ ПРИБЛИЖЕННЫМИ МЕТОДАМИ
Цели работы: закрепление теоретических сведений по динамике систем с нелинейными звеньями, приобретение навыков исследования автоколебательных процессов в нелинейных замкнутых системах автоматического управления методами гармонического баланса или гармонической линеаризации.
Порядок выполнения работы
Для схемы и исходных данных лабораторной работы N8 получить комплексную характеристику нелинейного звена.
Для трех различных наборов параметров регулятора и нелинейного звена методами гармонического баланса или гармонической линеаризации оценить возможность возникновения устойчивых автоколебаний при нулевом задании, определить частоту автоколебаний и амплитуду сигнала х1 (рис. 9.1).
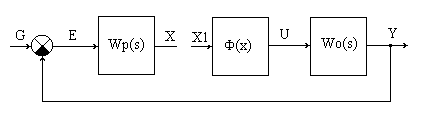
Рис.9.1. Структурная схема условно разомкнутой системы
Используя программу лабораторной работы N8 построить переходные процессы для
 и определить частоту колебаний (если они возникают) и амплитуду сигнала х. Сравнить их с вычисленными в предыдущем пункте.
и определить частоту колебаний (если они возникают) и амплитуду сигнала х. Сравнить их с вычисленными в предыдущем пункте.Теоретические сведения
Метод гармонического баланса
В общем случае условие возникновения автоколебаний в замкнутой нелинейной системе формулируется следующим образом: если гармонический сигнал при прохождении через разомкнутую систему сохраняет амплитуду (баланс амплитуд), а фазу изменяет на 180о (баланс фаз), то при замыкании такой системы в ней возникнут автоколебания. Для системы (рис.8.1), разомкнутой перед нелинейным звеном (рис.9.1), условие возникновения автоколебаний будет записано как:
 (9.1)
(9.1)и
 . (9.2)
. (9.2)Чтобы проверить выполнение условия возникновения автоколебаний в конкретной системе, например, с нелинейной функцией представленной на рис. 8.3, необходимо перейти от сигналов к параметрам системы, используя ее математическое описание:
 (9.3)
(9.3)
где Wр(p) и Wо(p) - передаточные функции регулятора и объекта управления в операторной форме, Ф(х1) - функция нелинейного преобразования сигнала х1(t).
При подаче на вход нелинейного звена разомкнутой системы гармонического сигнала х1(t) с амплитудой A>b, на выходе нелинейного звена (см.рис.8.4) сформируется периодический импульсный сигнал u с прямоугольными импульсами (рис.9.2), период следования которых совпадает с периодом входного гармонического сигнала.

Рис. 9.2. Сигналы на входе и выходе нелинейного звена
Управляющий сигнал u можно представить в виде суммы гармонических сигналов ( ряда Фурье):
 , (9.4)
, (9.4)где ak и bk - коэффициенты ряда Фурье, вычисляемые как:
 , k=1, 2, ... (9.5)
, k=1, 2, ... (9.5) , (9.6)
, (9.6) , k=1, 2 ... (9.7)
, k=1, 2 ... (9.7)k - частота k-й гармоники, равная 2k/T, T - длительность интервала разложения функции, равная периоду повторения сигнала Т= 2/.
Если линейные звенья системы выполняют фильтрацию низких частот сигнала, то при прохождении сигналом этих звеньев амплитуды гармоник сигнала u, частоты которых выше частоты среза АЧХ звеньев, будут уменьшены по сравнению с первой гармоникой. Вследствие этого, с определенной степенью точности, можно ограничится анализом изменения амплитуды и фазы только первой (основной) гармоники, приняв
 ,
,или
 , (9.8)
, (9.8) где a1(A) =a1/А , b1(A) = b1/A.
Выражение (9.8) можно переписать как
 , (9.9)
, (9.9)  , (9.10)
, (9.10) . (9.11)
. (9.11)По аналогии с линейными системами, функции g(A) и (A) можно считать модулем и фазой некоторой комплексной характеристики нелинейного звена,
J (A)= g(A)exp[j(A)] = a1(A) + jb1(A), (9.12)
эквивалентной частотной характеристике или передаточной функции линейной системы. Сигнал на выходе нелинейного элемента с учетом сказанного будет равен u = J (A)х1.
Коэффициенты a1(A) и b1(A) в соответствии с (9.5), (9.7) при
 и
и  могут быть записаны как:
могут быть записаны как: , (9.13)
, (9.13)  , (9.14)
, (9.14)где
 - фазовый угол гармонического сигнала, равный
- фазовый угол гармонического сигнала, равный  .
.Так как
 принимает постоянные значения на участках
принимает постоянные значения на участках  , интегралы (9.13), (9.14) представляются суммами интегралов от элементарных функций косинуса и синуса для этих участков:
, интегралы (9.13), (9.14) представляются суммами интегралов от элементарных функций косинуса и синуса для этих участков: , (9.15)
, (9.15)  , 9.16)
, 9.16)а
 определяются из условия достижения входным гармоническим сигналом x1 пороговых уровней переключения -b и +b , т.е.
определяются из условия достижения входным гармоническим сигналом x1 пороговых уровней переключения -b и +b , т.е. и
и  или
или ,
,  . (9.17)
. (9.17)Коэффициенты a1(A), b1(A) с учетом выражений (9.17)равны
 ,(9.18)
,(9.18)  , (9.19)
, (9.19) Для случая g(t)=0, исключая из системы (9.3), промежуточные переменные e(t), y(t), u(t), получаем
 . (9.20)
. (9.20)Условие возникновения автоколебаний (9.2) с учетом выражения (9.20) можно записать в следующем виде:
 . (9.21)
. (9.21)Для линейной части системы управления с конечной импульсной характеристикой правомерна замена р на j, т.е.
 . (9.22)
. (9.22)Если можно найти действительные значения А и , удовлетворяющие условию (9.22) (действительные корни уравнения (9.22)), то эти значения и будут параметрами автоколебаний, возникающих в замкнутой нелинейной системе. Решать уравнение (9.22) можно графическим методом путем построения графиков функций F(j ) =Wp(j ).Wo(j) и G(A)=-1/J(A) = -1/[a(A) + jb(A)] с нахождением значений A, соответствующих точкам их пересечения. Можно также построить графики функций
H(j ) = -1/[ Wp(j ).Wo(j)] , J(A) и искать координаты их точек пересечения. В первом случае решается уравнение (9.22), преобразованное к виду: Wp(j ).Wo(j) = - 1/ J(A) , во втором - к виду: J(A)=-1/[ Wp(j ).Wo(j)].
Первый вариант построения позволяет оценить устойчивость автоколебаний по критерию Л. С. Гольдфарба: для устойчивой разомкнутой линейной системы точка пересечения комплексной частотной характеристики линейной части системы и - 1/ J(A) определяет и А, соответствующие устойчивым автоколебаниям если при увеличении А кривая - 1/ J(A) выходит за пределы контура АФЧХ или контура, дополненного окружностью с радиусом больше единицы, начинающейся на действительной полуоси (см. критерий Найквиста).