
Ственный институт наука и студенты: новые идеи и решения Сборник материалов viii-й внутривузовской научно-практической студенческой конференции Кемерово 2009
| Вид материала | Документы |
СодержаниеИнженерный факультет удк631.16.022 математическая модель зоны деформации почвы рыхлительными лапами культиваторов |
- Томск, Россия Информационные технологии: к истокам некоторых заблуждений Сборник материалов, 293.71kb.
- Сборник статей ежегодной международной студенческой научно-практической конференции, 1058.05kb.
- Уважаемые коллеги, аспиранты, студенты!, 58.52kb.
- Доклады и тезисы представлены в авторской редакции. Сподробными материалами конференции, 2528.5kb.
- Формат конференции: Конференция проводится заочно с изданием печатного сборника материалов, 120.08kb.
- Д. С. Лихачёва и проблемы современного мегаполиса Сборник докладов участников международной, 3272.71kb.
- Итоги и перспективы энциклопедических исследований сборник статей итоговой научно-практической, 3301.6kb.
- Актуальные социально-экономические и правовые аспекты устойчивого развития региона., 3483.41kb.
- Программа студенческой научно-практической конференции с международным участием Научные, 254.22kb.
- С. Л. Колесников Сборник материалов областной научно-практической Интернет-конференции, 1483.28kb.
ИНЖЕНЕРНЫЙ ФАКУЛЬТЕТ
УДК631.16.022
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЗОНЫ ДЕФОРМАЦИИ ПОЧВЫ
РЫХЛИТЕЛЬНЫМИ ЛАПАМИ КУЛЬТИВАТОРОВ
Агафонов В.В., Устюжанин И.А.
Научный руководитель: Быков С.Н.
ФГОУ ВПО «Кемеровский государственный сельскохозяйственный институт»
Актуальной задачей при выполнении предпосевной обработки почвы является снижение энергозатрат при достижении установленных агротехнических требований по качеству почвы (глубина обработки, равномерность рыхления, размер подпочвенных гребней, зона перекрытия лап, мелкие почвенные агрегаты на поверхности и т.д.).
Для предпосевной обработки культиваторами широко используются рыхлительные лапы (см. рис.1).

а
б
Рис. 1. – Рыхлительные лапы культиваторов:
а – лапа с жесткой долотообразной стойкой; б – лапа с S-образной пружинной стойкой
Лапы с жесткими долотообразными стойками применяют на всех некаменистых почвах. Ширина захвата составляет b0=35…65 мм. Глубина рыхления a=10…25 см. Угол крошения β=40...45°.
Лапы с S-образными пружинными стойками применяют для вычесывания корнеотпрысковых сорняков, культивации почвы повышенной влажности. Во время работы они вибрируют и самоочищаются от растительных остатков. Ширина захвата составляет b0=20…50 мм. Глубина рыхления a=8…16 см. Угол крошения β=25...30°.
Нами исследовалась зона деформации почвы в зависимости от вида рыхлительной лапы (с жесткими β=45° стойками и с пружинными β=30° стойками, причем, b0=40 мм для обеих лап), от скорости обработки (V1 = 1м/с и V2 = 1,3 м/с), от глубины обработки (а1 = 10 см и а2=15см).
Для проведения исследований нами использовался лабораторный стенд «бесконечный почвенный канал» (ауд. №1014). Стенд представляет собой кольцеобразный желоб прямоугольного сечения, по внешней стенке которого на опорных роликах вращается крестовина, приводящаяся в движение от электродвигателя через редуктор и ременную передачу. На валу редуктора закреплен 3-х ручейный шкив, обеспечивающий три скорости обработки. На крестовине имеется устройство для крепления рабочих органов.
В качестве имитатора почвы используется гранулированный полипропилен, плотность которого ρ = 1,2 кг/дм3, коэффициент удельного сопротивления деформации k = 5 кН/м2, средний диаметр гранул d = 3 мм.
Его главной особенностью является неизменность структуры при многократном воздействии на него рабочего органа, что обеспечивает стабильность результатов.
Исследование зоны деформации почвы рыхлительными лапами осуществлялось на основе теоретических положений механики грунтов. В соответствии с теорией зона деформации почвы не ограничивается зоной ее контакта с рабочими органами, а распространяется вперед и в стороны на определенные расстояния. Деформация почвы путем скалывания должна начинаться со дна борозды и распространяться вверх под определенным углом θ2 к вертикали (см. рис.2.).
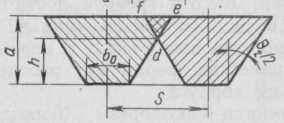
m
Рис. 2. – Зоны деформации почвы в поперечно-вертикальной плоскости для двух рыхлительных лап
Из рисунка видно, что при определенной эффективной расстановке лап соседние зоны деформации располагаются на расстоянии m=15…35 см друг от друга. При этом обеспечивается сплошная обработка поверхности почвы за счет перекрытия зон деформации, величина которого составляет |fe|= 4…8 см.
Некоторым недостатком в работе рыхлительных лап является наличие подпочвенных гребней, величина которых h=5…15 см.
Основным параметром обработки является ширина зоны деформации, которая определяется по формуле
B = b0 +2a · tg θ2 /2
Отметим, что данная формула имеет несколько недостатков.
Во-первых, неизвестно точное значение угла θ2, что существенно снижает точность результатов.
Во-вторых, граница скалывания почвы может быть не прямой, а криволинейной, что влияет на площадь зоны деформации.
В-третьих, не учитывается скорость движения машины и геометрия рабочего органа.
Таким образом, одна из основных задач нашего исследования состояла в определении действительной формы зоны деформации почвы, т.к. трапецеидальной она является только в теории.
На основании этого можно более точно измерить площадь зоны деформации, более рационально расставить лапы на раме культиватора и определить аналитическим способом силовые характеристики обработки почвы этими лапами.
Для определения действительной зоны деформации почвы после прохода рыхлительной лапы в желобе лабораторного стенда исследовалась траектория перемещения гранул полипропилена по двум координатным осям: перпендикулярно движению лапы (ось У) – и по вертикали (ось Z).
Для этого нами был разработан метод «цветных нумерованных фишек». Фишки диаметром 6 мм имеют сферическую форму и окрашены в четыре цвета, каждый из которых соответствует определенному слою в имитаторе почвы. Перед запуском стенда фишки раскладываются в виде пространственной решетки. Фишки одного слоя в количестве 5х5=25 штук располагаются рядами на расстоянии 50 мм по ширине и длине почвенного канала. Каждый слой фишек раскладывается на глубине 30, 60, 90, 120 мм в имитаторе почвы. Общее количество фишек составляет 100 шт. При закладке обязательно производится трамбовка каждого слоя фишек и полипропилена.
После прохода рыхлительной лапы фишки смещаются и занимают определенное положение. В результате многократного повторения данного опыта на основе статистических методов получаются относительно точные значения пространственных координат итогового расположения фишек (погрешность составила не более 10%).
В результате исследований обнаружено, что граница скалывания почвы не является прямой линией. Она криволинейна и имеет выпуклость в сторону необработанной зоны. Таким образом, реальная площадь зоны деформации почвы на 10-20% больше теоретической, что можно считать положительным явлением. Это позволяет сократить количество рыхлительных лап на культиваторе на 5-10% при сохранении допустимого качества обработки и снижении энергозатрат.
Сама кривая скалывания почвы по форме близка к параболе, с вершиной в нижней точке лапы на глубине обработки (см. рис.3).
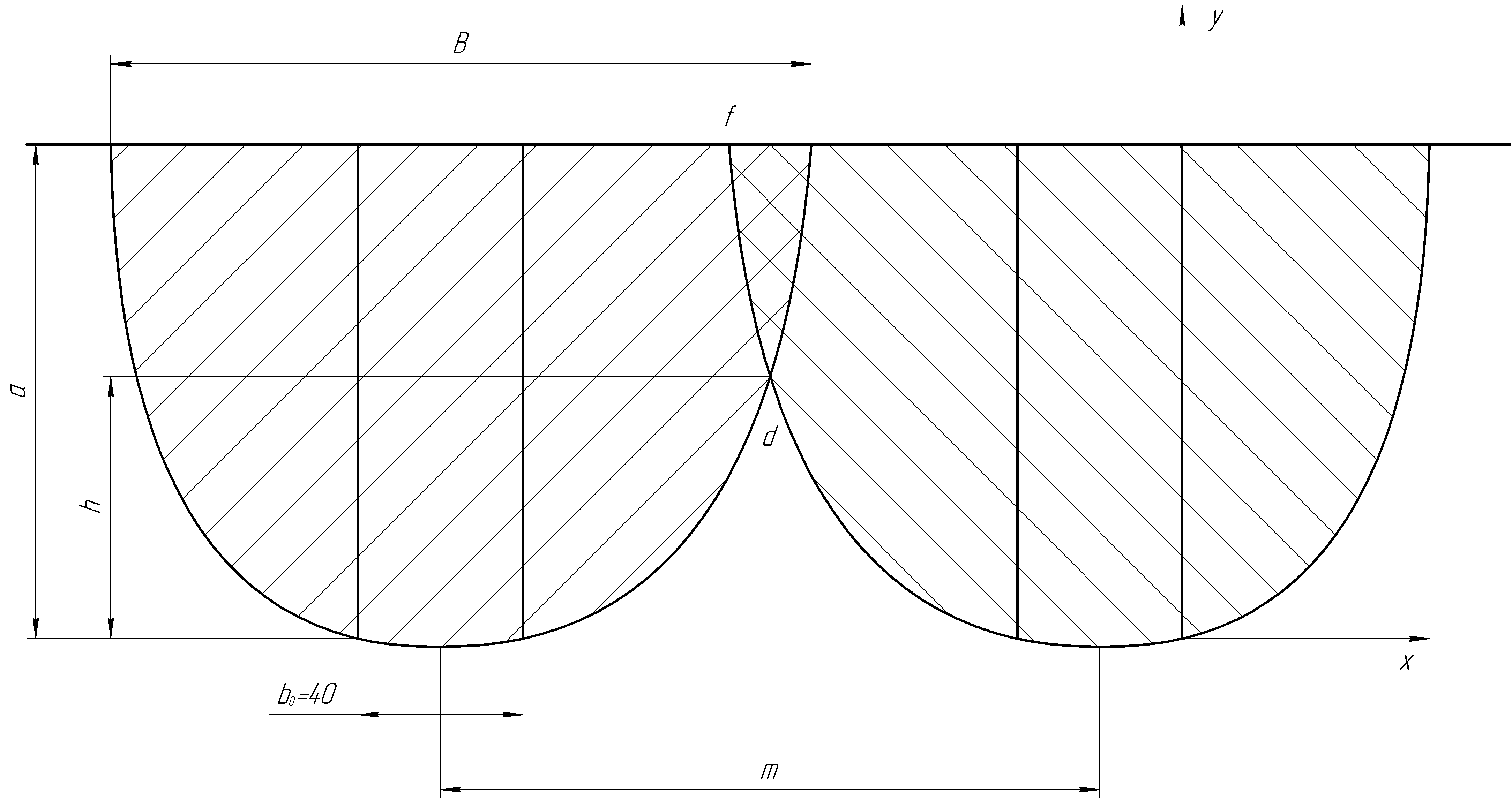
Рис. 3. – Выявленные параболические зоны деформации почвы
Значения ширины зоны деформации в результате экспериментов ВЭ для всех сочетаний начальных условий исследования приведены в таблице
Таблица 1.– Результаты исследований зоны рыхления
| Вид лапы | С жесткой стойкой β=45° | С пружинной стойкой β=30° | ||||||
| Глубина обработки, см | а1 = 10 | а2=15 | а1 = 10 | а2=15 | ||||
| Скорость обработки, м/с | V1 = 1 | V2 =1,3 | V1 = 1 | V2 =1,3 | V1 = 1 | V2 =1,3 | V1 = 1 | V2 =1,3 |
| Ширина зоны деф. эксперимент. ВЭ, см | 11,0 | 13,4 | 12,9 | 15,1 | 9,2 | 10,3 | 10,0 | 12,3 |
| Ширина зоны деф. по формуле В, см | 11,1 | 13,2 | 12,7 | 15,3 | 9 | 10,5 | 10,1 | 12 |
| Площадь зоны деформ. S, см2 | 87 | 102 | 147 | 173 | 73 | 83 | 121 | 140 |
| Сила сопротив-ления F, Н | 43,5 | 51 | 73,5 | 86,5 | 31,5 | 41,5 | 60,5 | 70 |
По данным таблицы разработана математическая многофакторная модель зоны деформации почвы рыхлительными лапами культиватора. В отличие от существующей модели, предлагаемые нами регрессионные зависимости, учитывают скорость обработки почвы V, геометрию рыхлительной лапы (через угол крошения β) и технологические свойства почвы (через коэффициент удельного сопротивления почвы k).
В
 = b0 + V· sinβ · √ a k
= b0 + V· sinβ · √ a kгде В – ширина зоны деформации, см;
b0 – ширина лапы, см;
V – скорость культиватора, м/с;
β – угол крошения лапы, градус;
a – глубина обработки, см;
k – коэффициент удельного сопротивления почвы, кН/м2.
Кроме того, нами была определена площадь зоны деформации S почвы для каждого из 8 условий эксперимента (рисунок на миллиметровой бумаге). Результаты занесены в таблицу.
Таким образом, зная площадь деформации почвы S, на основе рациональной формулы В.П. Горячкина можно определить силу сопротивления почвы для одной лапы, используя формулу:
F = k · S
где F – сила сопротивления почвы для одной лапы, кН;
S – площадь деформации почвы, м2.
Для используемого имитатора почвы (гранулированный полипропилен) рассчитанные значения силы сопротивления почвы внесены в таблицу.
Значения в таблице для силы сопротивления F относительно хорошо согласуются с результатами ранее проведенных исследований по измерению этой силы с помощью установленной на данном стенде электронной тензометрической системы измерения сил. Отклонения составили не более 10%.
В заключение можно отметить, что для увеличения зоны деформации и улучшения качества обработки почвы целесообразно использовать рыхлительные лапы с жесткой стойкой. Однако в случае сильной засоренности поля растительностью, такие лапы больше забиваются и, возможно, лучше будет установить лапы с пружинной стойкой.
Что касается скорости культиватора, то ее целесообразно увеличивать. Однако главным ограничением здесь является мощность трактора и стабильность его перемещения по полю.
Последний фактор исследований – глубина обработки. Она устанавливается в соответствии с агротехническим требованиями при возделывании предполагаемой для данного поля посевной культуры.
УДК УДК631.243.33