
Увеличение оптическое
| Вид материала | Документы |
- Оптическое оборудование, 171.18kb.
- Хованскова Инна Александровна, 37.43kb.
- Полиграфический словарь, 499.28kb.
- Увеличение продаж – возможно ли это сейчас?, 24.11kb.
- Оптическое оборудование, 440.32kb.
- Машиностроение, 219.74kb.
- Кроэкономической ситуации стало сохранение и увеличение денежных сбережений населения,, 61.54kb.
- Патофизиология регионарного кровообращения и микроциркуляции, 124.19kb.
- Увеличение пенсионного возраста для женщин, 218.59kb.
- Федеральная целевая программа «Жилище» на 2002-2010 годы и входящие в ее состав подпрограммы, 116.2kb.
УПРУГАЯ ДЕФОРМАЦИЯ, см. Деформация механическая.
УПРУГИЕ ВОЛНЫ, упругие возмущения, распространяющиеся в твёрдой, жидкой и газообразной средах, напр. волны, возникающие в земной коре при землетрясениях, звук. и ультразвук. волны в жидкостях, газах и тв. телах. При распространении У. в. в среде возникают механич. деформации сжатия и сдвига, к-рые переносятся волной из одной точки среды в другую. При этом имеет место перенос энергии упругой деформации в отсутствие потока в-ва (исключая особые случаи, напр. акустические течения). Всякая гармонич. У. в. характеризуется амплитудой колебательного смещения частиц среды и его направлением, колебательной скоростью частиц, переменным механич. напряжением и деформацией (к-рые в общем случае явл. тензорными величинами), частотой колебаний ч-ц среды, длиной волны, фазовой и групповой скоростями, а также законом распределения смещений и напряжений по фронту волны.
В жидкостях и газах, к-рые обладают упругостью объёма, но не обладают упругостью формы, могут распространяться лишь продольные волны разрежения-сжатия, где колебания ч-ц среды происходят в направлении распространения волны. Фазовая скорость их cl=(K/), где К — модуль всестороннего сжатия, — плотность среды. Пример таких У. в.— звук. волны.
В однородной изотропной бесконечно протяжённой тв. среде могут распространяться У. в. только двух типов — продольные и сдвиговые. В продольных движение ч-ц параллельно направлению распространения волны, а деформация представляет собой комбинацию всестороннего сжатия (растяжения) и чистого сдвига. В сдвиговых волнах движение ч-ц перпендикулярно направлению распространения волны, а деформация явл. чистым сдвигом. В безграничной среде распространяются продольные и сдвиговые волны трёх типов — плоские, сферические и цилиндрические. Их особенность — независимость фазовой и групповой скоростей от амплитуды и геометрии волны. Фазовая скорость продольных волн в неограниченной тв. среде сl=((К+4/3G)/), сдвиговых ct=(G/) (G — модуль сдвига). Величины cl и сt для разных сред колеблются в пределах от сотен до неск. тысяч м/с.
На границе тв. полупространства с вакуумом, газом, жидкостью или с др. тв. полупространством могут распространяться упругие поверхностные волны (см. Поверхностные акустические волны), являющиеся комбинацией неоднородных продольных и сдвиговых волн, амплитуды к-рых экспоненциально убывают при удалении от границы.
В ограниченных тв. телах (пластина, стержень), представляющих собой тв. волноводы акустические, могут распространяться только нормальные волны, каждая из к-рых явл. комбинацией неск. продольных и сдвиговых волн, распространяющихся под острыми углами к оси волновода и удовлетворяющих граничным условиям: отсутствию механич. напряжений на поверхности волновода. Число n норм. волн в пластине или стержне определяется толщиной или диаметром d, частотой и модулями упругости среды. При увеличении d число норм. волн возрастает, и при d n. Норм. волны характеризуются дисперсией фазовой и групповой скорости (см. Дисперсия звука).
В бесконечной пластине существуют два типа норм. волн — Лэмба волны и сдвиговые волны. Плоская волна Лэмба характеризуется двумя составляющими смещений, одна из к-рых параллельна направлению распространения волны, другая — перпендикулярна граням пластины. В плоской сдвиговой норм. волне смещения параллельны граням пластины и одновременно перпендикулярны направлению распространения волны. В цилиндрич. стержнях могут распространяться норм. волны трёх типов — продольные, изгибные и крутильные.
В анизотропных средах (кристаллах) св-ва У. в. зависят от типа кристалла и направления распространения. В частности, чисто продольные и чисто сдвиговые волны могут распространяться только в кристаллах определ. симметрии и по определ. направлениям, как правило, совпадающим с направлением кристаллографич. осей. В общем случае в кристалле по
любому направлению всегда распространяются три волны с тремя разл. скоростями: одна квазипродольная и две квазипоперечные, в к-рых преобладают соотв. продольные или поперечные смещения (см. Кристаллоакустика). При распространении У. в. в кристаллах может возникнуть ряд специфич. эффектов, напр. различие в направлениях фазовой и групповой скорости, усиление УЗ за счёт акустоэлектронного взаимодействия, дислокационное поглощение.
В любой упругой среде из-за внутр. трения и теплопроводности распространение У. в. сопровождается её поглощением (см. Поглощение звука). Если на пути У. в. имеется к.-л. препятствие (отражающая стенка, вакуумная полость и т. д.), то происходит дифракция волн на этом препятствии. Простейший случай дифракции — отражение и прохождение У. в. на плоской границе двух полупространств.
В У. в. механич. напряжения пропорц. деформациям (Гука закон). Если амплитуда деформации в тв. теле превосходит предел упругости материала, в волне появляются пластич. деформации и её наз. упругопластич. волной. Аналогом таких волн в жидкостях и газах являются волны т. н. конечной амплитуды. Скорость их распространения зависит от величины деформации.
Диапазон частот У. в. простирается от малых долей Гц до 1013 Гц. В последнем случае длины У. в. становятся сравнимыми с параметрами крист. решётки и их можно рассматривать как фононы. Область применения У. в. чрезвычайно широка: низкочастотные У. в. используются в сейсмологии (для регистрации землетрясений) и в сейсморазведке. У. в. килогерцевого диапазона применяются в гидролокации и при исследованиях океана. У. в. ультра- и гиперзвук. диапазона используются в физике для определения разл. параметров твёрдых, жидких и газообразных сред, применяются в акустоэлектронике, в промышленности для технол. и контрольно-измерит. целей, в медицине и др. областях. См. также Гиперзвук, Ультразвук.
• Ландау Л.Д., Лифшиц Е.М., Теория упругости, 3 изд., М., 1965 (Теоретическая физика, т. 7); Кольский Г., Волны напряжения в твердых телах, пер. с англ., М., 1955; Бергман Л., Ультразвук и его применение в науке и технике, пер. с нем., 2 изд., М., 1957; Физическая акустика, под ред. У. Мэзона, пер. с англ., т. 1,ч. А, М., 1966, гл. 1—2, 6; т. 4, ч. А, М., 1969, гл. 1; Бреховских Л. М., Волны в слоистых средах, 2 изд., М., 1973, гл. 1; Викторов И. А., Физические основы применения ультразвуковых волн Рэлея и Лэмба в технике, М., 1966.
И. А. Викторов.
УПРУГИЙ ГИСТЕРЕЗИС, см. Гистерезис.
УПРУГОЕ РАССЕЯНИЕ микрочастиц, процесс столкновения (рассеяния) ч-ц, при к-ром их внутр. состояния оста-
787
ются неизменными, а меняются лишь импульсы. См. Рассеяние микрочастиц. УПРУГОПЛАСТИЧЕСКАЯ ВОЛНА, волна в деформируемом тв. теле, амплитуда деформации при прохождении к-рой превосходит предел упругости вещества, и возникают пластические деформации. Скорость распространения таких волн зависит от величины деформации. В стержне, по к-рому прошла У. в., сохраняются остаточные деформации; по их распределению можно судить о динамических механических хар-ках материала.
УПРУГОСТИ ТЕОРИЯ, раздел механики, в к-ром изучаются перемещения, деформации и напряжения, возникающие в покоящихся или движущихся упругих телах под действием нагрузки. У. т.— теоретич. основа расчётов на прочность, деформируемость и устойчивость в строит. деле, авиа- и ракетостроении, машиностроении, горном деле и др. областях техники и пром-сти, а также в физике, сейсмологии, биомеханике и др. науках. Объектами исследования методами У. т. являются разнообразные тела (машины, сооружения, конструкции и их элементы, горные массивы, плотины, геол. структуры, части живого организма и т. п.), находящиеся под действием сил, температурных полей, радиоактивных облучений и др. воздействий. В результате расчётов методами У. т. определяются: допустимые нагрузки, при к-рых в рассчитываемом объекте не возникают напряжения или перемещения, опасные с точки зрения прочности или недопустимые по условиям функционирования; наиболее целесообразные конфигурации и размеры сооружений, конструкций и их деталей; перегрузки, возникающие при динамич. воздействии, напр. при прохождении упругих волн; амплитуды и частоты колебаний конструкций или их частей и возникающие в них динамич. напряжения; усилия, при к-рых рассчитываемый объект теряет устойчивость. Этими расчётами определяются также материалы, наиболее подходящие для изготовления проектируемого объекта, или материалы, к-рыми можно заменить части организма (костные и мышечные ткани, кровеносные сосуды и т. п.). Методы У. т. эффективно используются и для решения нек-рых классов задач пластичности теории (в методе последоват. приближений).
Законы упругости, имеющие место для большинства материалов, по крайней мере при малых (а иногда и больших) деформациях, отражают взаимно однозначные зависимости между текущими (мгновенными) значениями напряжений и деформаций. Осн. физ. закон У. т.— обобщённый Гука закон, согласно к-рому напряжения линейно зависят от деформаций. Для изотропных материалов эти зависимости имеют вид:
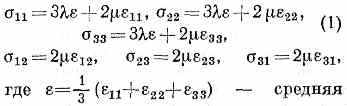
(гидростатическая) деформация, и — постоянные Ламе. Т. о., упругие свойства изотропного материала характеризуются двумя постоянными и или к.-н. выраженными через них двумя модулями упругости,
Равенство (1) можно также представить в виде:

где =1/3(11+22+33) — среднее
(гидростатич.) напряжение, К — модуль объёмной упругости.
Для нелинейного упругого изотропного материала в равенствах (2) всюду вместо входит коэфф. Ф(u)/3u, а соотношение =3K заменяется равенством =f(), где величина u наз. интенсивностью деформации, а функции Ф и f, универсальные для данного материала, определяются из опытов. Когда Ф(u) достигает нек-рого критич. значения, возникают пластич. деформации.
Матем. задача У. т. при равновесии состоит в том, чтобы, зная действующие внеш. силы (нагрузки) и т. н. граничные условия, определить в любой точке тела значения компонентов тензоров напряжений и деформаций, а также компоненты uх, uу, uz вектора перемещения частицы тела, т. е. определить эти 15 величин в виде функций от координат х, у, z точек тела. Исходными для решения этой задачи являются дифференциальные ур-ния равновесия:
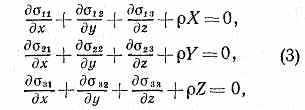
где — плотность материала, X, Y, Z — проекции на координатные оси действующей на каждую частицу тела массовой силы (напр., силы тяжести), отнесённой к массе этой частицы. К трём ур-ниям равновесия присоединяются 6 равенств (1) в случае изотропного тела и ещё 6 равенств вида:

устанавливающих зависимости между компонентами деформаций и перемещений.
Когда на часть S1 граничной поверхности тела действуют заданные поверхностные силы (напр., силы контактного взаимодействия), проекции
к-рых, отнесённые к единице площади, равны Fx, Fy, Fz, а для части S2 этой поверхности заданы перемещения ее точек х, у, z, граничные условия имеют вид:
11l1+l2l2 + 13l3=Fx, (5)
uх=х. uy=y, uz=z, (6)
где l1, l2, l3 — косинусы углов между нормалью к поверхности и координатными осями. Первые условия означают, что искомые напряжения должны удовлетворять на границе S1 трём равенствам (5), а вторые — что искомые перемещения должны удовлетворять на границе S2 равенствам (6); в частном случае может быть х=y=z=0 (часть поверхности S2 жёстко закреплена). Напр., в задаче о равновесии плотины массовая сила — сила тяжести, поверхность S2 подошвы плотины неподвижна, на остальной поверхности S1 действуют силы: напор воды, давление разл. надстроек, трансп. средств и т. д.
В общем случае поставленная задача представляет собой пространств. задачу У. т., решение к-рой трудно осуществимо. Точные аналитич. решения имеются лишь для нек-рых частных задач: об изгибе и кручении бруса, о контактном взаимодействии двух тел, о концентрации напряжений, о действии силы на вершину конич. тела и др. Т. к. ур-ния У. т. являются линейными, то решение задачи о совместном действии двух систем сил получается путём суммирования решений для каждой из систем сил, действующих раздельно (принцип суперпозиции). В частности, если для к.-н. тела найдено решение при действии сосредоточенной силы в к.-л. произвольной точке тела, то решение задачи при произвольном распределении нагрузок получается путём суммирования (интегрирования). Такие решения получены лишь для небольшого числа тел (неограниченное пространство, полупространство, ограниченное плоскостью, и нек-рые др.). Предложен ряд аналитич. методов решения пространственной задачи У. т.: вариационные методы (Ритца, Бубнова — Галёркина, Кастильяно и др.), метод упругих потенциалов, метод Бетти и др. Интенсивно разрабатываются численные методы (конечно-разностные, метод конечных элементов и др.). Разработка общих методов решений пространственной задачи У. т.— одна из наиболее актуальных проблем У. т.
При решении плоских задач У. т. (когда один из компонентов перемещения равен нулю, а два др. зависят только от двух координат) широкое применение находят -методы теории функций комплексного переменного. Для стержней, пластин и оболочек, часто используемых в технике, найдены приближённые решения мн.
788
практически важных задач на основе нек-рых упрощающих предположений. Применительно к этим объектам интерес представляют задачи об устойчивости равновесия (см. Устойчивость упругих систем).
В задаче термоупругости определяются напряжения и деформации, возникающие вследствие неоднородного распределения темп-ры в теле. При матем. постановке этой задачи в правую часть первых трёх ур-ний (1) добавляется член -(З+2)T, где — коэфф. линейного теплового расширения, Т (х1, х2, х3) — заданное поле темп-ры. Аналогичным образом строится теория электромагнитоупругости и упругости тел, подвергаемых облучению.
Большой практич. интерес представляют задачи У. т. для неоднородных тел. В этих задачах коэфф. и в ур-нии (1) являются не константами, а функциями координат, определяющими поле упругих свойств тела, к-рое иногда задают статистически (в виде нек-рых функций распределения). Применительно к этим задачам разрабатываются статистич. методы У. т., отражающие статистическую природу свойств поликристаллич. тел.
В динамич. задачах У. т. искомые величины являются функциями координат и времени. Исходными для матем. решения этих задач являются дифф. ур-ния движения, отличающиеся от ур-ний (3) тем, что правые части вместо нуля содержат инерц. члены д2ux/дt2 и т. д. К исходным ур-ниям должны также присоединяться ур-ния (1), (4) и, кроме граничных условий (5), (6), ещё задаваться начальные условия, определяющие, напр., распределение перемещений и скоростей ч-ц тела в начальный момент времени. К этому типу относятся задачи о колебаниях конструкций и сооружений, в к-рых могут определяться формы колебаний и их возможные смены, амплитуды колебаний и их нарастание или убывание во времени, резонансные режимы, динамич. напряжения, методы возбуждения и гашения колебаний и др., а также задачи о распространении упругих волн (сейсмич. волны и их воздействие на конструкции и сооружения, волны, возникающие при взрывах и ударах, термоупругие волны и т. д.).
Одной из совр. проблем У. т. является матем. постановка задач и разработка методов их решения при конечных (больших) упругих деформациях.
Экспериментальные методы У. т. (метод многоточечного тензометрирования, поляризационно-оптический метод исследования напряжений, метод муаров и др.) позволяют в нек-рых случаях непосредственно определить распределение напряжений и деформаций в исследуемом объекте или на его поверхности. Эти методы используются также для контроля решений, полученных аналитич. и численными
методами, особенно когда решения найдены при к.-н. упрощающих допущениях. Иногда эффективными оказываются экспериментально-теоретич. методы, в к-рых частичная информация об искомых функциях получается из опытов.
• Ляв А. (Л а в), Математическая теория упругости, пер. с англ., М.— Л., 1935; Трехмерные задачи математической теории упругости и термоупругости, под ред. В. Д. Купрадзе, 2 изд., М., 1976;
С т р е т т Дж. В. (лорд Рэлей), Теория звука, пер. с англ., 2 изд., т. 1—2, М., 1955; Боли Б. Уэйнер Дж., Теория температурных напряжений, пер. с англ., М., 1964; Т и м о ш е н к о С. П., Гудьер Дж. Н., Теория упругости, пер. с англ., М., 1975.
А. А. Ильюшин, В. С. Ленский.
УПРУГОСТЬ, свойство тел изменять форму и размеры под действием нагрузок и самопроизвольно восстанавливать исходную конфигурацию при прекращении внеш. воздействий.
Количественно У. выражается в том, что компоненты тензора напряжений (см. Напряжение механическое) в изотермич. условиях явл. функциями компонентов тензора деформации (см. Деформация механическая), к-рые универсальны для данного материала и не зависят от того, в каком порядке происходит изменение разл. компонентов деформации до достижения ими рассматриваемых значений. В большинстве материалов (напр., в металлах, керамике, горных породах, древесине) при малых деформациях зависимости между напряжениями и деформациями можно считать линейными и описывать обобщённым Гука законом. Законам нелинейной У. можно придать форму, подобную обобщённому закону Гука, заменив модули упругости нек-рыми универсальными функциями (см. Упругости теория).
У. тел обусловлена силами вз-ствия атомов, из к-рых они построены. В тв. телах при темп-ре абс. нуля в отсутствии внеш. напряжений атомы занимают равновесные положения, в к-рых сумма всех сил, действующих на каждый атом со стороны остальных, равна нулю, а потенц. энергия атома минимальна. Кроме сил притяжения и отталкивания, зависящих только от расстояния между атомами (центр. силы), в многоатомных молекулах и макроскопич. телах действуют также нецентральные силы, зависящие от т. н. валентных углов между прямыми, соединяющими данный атом с разл. его соседями (рис.). При равновесных значениях валентных углов нецентральные силы также уравновешены. Энергия макроскопич. тела зависит от межатомных расстояний и валентных углов, принимая миним. значение при равновесных значениях этих параметров.
Под действием внеш. напряжений атомы смещаются из своих равновесных положений, что сопровождается увеличением потенц. энергии тела на величину, равную работе внеш. напряжений по изменению объёма и формы тела. После снятия внеш. напряжений конфигурация упруго де-
формиров. тела с неравновесными межатомными расстояниями и валентными углами оказывается неустойчивой и самопроизвольно возвращается в равновесное состояние. Запасённая в теле избыточная потенц. энергия превращается в кинетич. энергию колеблющихся атомов, т. е. в теплоту. Пока отклонения межатомных расстояний и
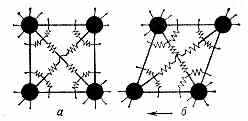
Шариковая модель элем. ячейки кубич. кристалла: а — в равновесии при отсутствии внеш. сил; б — под действием внеш. касательного напряжения.
валентных углов от их равновесных значений малы, они пропорц. действующим между атомами силам, подобно тому, как удлинение или сжатие пружины пропорц. приложенной силе. Поэтому тело можно представить как совокупность атомов-шариков, соединённых пружинами, ориентации к-рых фиксированы др. пружинами (рис.). Константы упругости этих пружин определяют модули упругости материала.
В жидкости тепловые колебания имеют амплитуду, сравнимую с равновесным межатомным расстоянием, вследствие чего атомы легко меняют своих соседей и не сопротивляются касат. напряжениям, если они прикладываются со скоростью, значительно меньшей скорости тепловых колебаний. Поэтому жидкости (как и газы) не обладают упругостью формы, а только объёма: уменьшение объёма пропорционально приложенному давлению.
В газообразном состоянии средние расстояния между атомами или молекулами значительно больше, чем в конденсированном. Упругость газов (паров) определяется тепловым движением молекул, ударяющихся о стенки сосуда, ограничивающего объём газа.
• Фейнман Р., Лейтон Р., С э н д с М., Фейнмановские лекции по физике, 2 изд., [в.] 7, М., 1977, гл. 38—39; Смирнов А. А., Молекулярно-кинетическая теория металлов, М., 1966, гл. 2; Френкель Я. И., Введение в теорию металлов, 4 изд., Л., 1972, гл. 2.
А. Н. Орлов.