
40. Динамические экспертные системы
| Вид материала | Документы |
- Курс лекций "Экспертные системы" (Для студентов заочного обучения юридического факультета, 84.44kb.
- 4 Экспертные системы, 51.16kb.
- 14. Лекция: Позиционно-силовое управление в системе робота-станка, 113.23kb.
- Алгоритмы обучения и архитектура нейронных сетей. Нейросетевые системы обработки информации, 21.42kb.
- Программа дисциплины «Динамические системы» Направление, 73.11kb.
- Рабочая программа дисциплины «Дискретные динамические системы», 110.59kb.
- Говоря простым языком, системы баз знаний это искусство, которое использует достижения, 267.75kb.
- Лекция №15. Экспертные системы Экспертные системы зародились в ходе развития методов, 188.15kb.
- Динамика системы управления гидротурбиной с пидрегулятором, 80.14kb.
- О некоторых особенностях интегрирования обыкновенных дифференциальных уравнений, описывающих, 18.79kb.
Рассмотрим еще один пример. Рассчитаем вероятность безотказной работы схемы с мажоритарным резервированием (см. рис. 8). Предположим, что надежность мажоритарного органа равна единице.
Составляем таблицу истинности (табл. 2)

Булева функция р задана ОДНФ. Непосредственно переходим к замещению булевой функции вероятностной

Так как


 то
то
 .
. При
 .
.Таким образом, логико-вероятностный метод позволяет проводить точный расчет надежности систем, каждой из элементов которой имеют два состояния полной работоспособности и отказа.
Таблица 2
| № п/п | P1 | Р2 | P3 | р |
| 1 | 0 | 0 | 0 | 0 |
| 2 | 0 | 0 | 1 | 0 |
| 3 | 0 | 1 | 0 | 0 |
| 4 | 0 | 1 | 1 | 1 |
| 5 | 1 | 0 | 0 | 0 |
| 6 | 1 | 0 | 1 | 1 |
| 7 | 1 | 1 | 0 | 1 |
| 8 | 1 | 1 | 1 | 1 |
Логико-вероятностный метод, основанный на булевой модели надежности системы, не позволяет учитывать очередность наступления отказов. Для учета очередности используется последовательное дерево отказов [3].
Для оценки надежности изделия, подвергающегося техническому обслуживанию, используют математический аппарат марковских процессов.
Метод расчета с использованием аппарата теории марковских процессов
Пусть имеется некоторая система S. Говорят, что в системе происходит случайный процесс, если она с течением времени может под влиянием случайных факторов (например, отказов и восстановлений отдельных компонент) изменять свое состояние.
Система называется системой с дискретными состояниями, если она имеет счетное (в частном случае конечное) множество возможных состояний So, Su ... , Sh и переход из одного состояния в другое осуществляется скачком.
Для описания случайного процесса, протекающего в системе с дискретными состояниями Su, Sb ..., S*. пользуются ве-
роятностями состояний Po(t), Pi (t),... , Ph(t), где Pi{t), i— = (0, 1,... , k) —вероятность того, что система в момент времени t находится в состоянии S,-. Вероятности Pi{t) удовлетворяют условию

Случайный процесс в системе S называется процессом с дискретным временем, если переходы системы из одного состояния в другое возможны только в определенные моменты
времени to,t\..... Если переходы возможны в любой момент
времени, то процесс называется процессом с непрерывным временем.
Случайный процесс с дискретными состояниями называется марковским (или процессом без последействия), если все вероятностные характеристики процесса в будущем зависят лишь от того, в каком состоянии этот процесс находится в настоящий момент времени, и не зависит от того, каким образом этот процесс протекал в прошлом (будущее зависит от прошлого только через настоящее).
Марковский процесс представляет собой марковскую цепь с различными состояниями и может быть представлен матрицей значений переходных вероятностей
Элемент матрицы переходов рц соответствует вероятности того, что марковская цепь, находящаяся в состоянии S,-, на очередном шаге перейдет в состояние S/. Из самого определения марковской цепи ясно, что переходные вероятности не зависят от номера шага, т. е. процесс переходов стационарный во времени.
Таким образом, марковская цепь — дискретный случайный процесс с дискретным временем, у которого переходы осуществляются через некоторый интервал времени
 из одного состояния в другое в счетном множестве состояний.
из одного состояния в другое в счетном множестве состояний.В марковском процессе длительность пребывания в каждом из состояний ^ Si величина случайная, имеющая свое распределение
 для каждого k-го состояния. Причем все распределения Fk(t) подчиняются экспоненциальному закону.
для каждого k-го состояния. Причем все распределения Fk(t) подчиняются экспоненциальному закону.Марковский процесс обладает характерными свойствами, определяемыми в первую очередь, эйспоненциальиостью распределения времени пребывания процесса в каждом из состояний:
стационарностью, когда переходные вероятности и длительности пребывания в том или ином состоянии не зависят от того, в какой момент времени рассматривается этот процесс;
ординарностью,когда за бесконечно малый интервал времени не может произойти более одного перехода из одного состояния в другое состояние;
отсутствием последействия, когда вся последующая траектория перехода процесса из состояния а состояние зависит только от текущего состояния и не зависит от всей прошлой истории развития этого процесса или от любой его части.
Марковский процесс удобно описывать ориентированным графом переходов, вершины которого представляют собой состояния, а «веса» ребер соответствуют интенсивностям перехода из одного состояния в другое. Понятно, что зная переходные вероятности
 и параметр
и параметр  распределения времени пребывания процесса в данном i-м состоянии, можно легко найти эти «веса» по формуле
распределения времени пребывания процесса в данном i-м состоянии, можно легко найти эти «веса» по формуле
Если при описании процесса перехода системы из состояния в состояние сохранить марковское свойство, можно считать, что пребывание в каждом из состояний Fis(t) подчиняется произвольному (а не экспоненциальному) закону распределения. Такой процесс называется полумарковским или неоднородным марковским.
В дальнейшем будем рассматривать только марковские процессы.
На основании графа переходов можно составить систему дифференциальных уравнений для нахождения вероятностей пребывания марковского процесса в состояниях

 . При этом следует руководствоваться следующим простым правилом. Производная (по /) от пребывания системы в момент времени t в состоянии Pi{t) равна алгебраической сумме произведений интенсивности переходов на соответствующие вероятности. Слагаемым, которым соответствуют выходящие (из данного состояния) дуги графа, приписывается знак минус, остальным — плюс. Общее число слагаемых равно общему числу входящих и выходящих дуг.
. При этом следует руководствоваться следующим простым правилом. Производная (по /) от пребывания системы в момент времени t в состоянии Pi{t) равна алгебраической сумме произведений интенсивности переходов на соответствующие вероятности. Слагаемым, которым соответствуют выходящие (из данного состояния) дуги графа, приписывается знак минус, остальным — плюс. Общее число слагаемых равно общему числу входящих и выходящих дуг.Система дифференциальных уравнений содержит k дифференциальных уравнений и k неизвестных. Однако все эти уравнения линейно зависимы. Поэтому нужно дополнить их так называемым уравнением нормировки, которое показывает, что сумма вероятностей событий, образующих полную группу, равна единице.
В результате одно любое из дифференциальных уравнений системы может быть исключено.
Различают два типа случайных процессов:
при первом же попадании в неработоспособное состояние процесс прекращается (процесс с поглощающим экраном);
система находится в стационарном режиме отказов и восстановлений (процесс с отражающим экраном).
Первый процесс характерен для невосстанавливаемых изделий, второй для восстанавливаемых.
Пример. Рассмотрим однокомпопентную восстанавливаемую систему, имеющую два состояния: ^ Pi{t) —работоспособность;
 —отказ; к — интенсивность отказа; µ — интенсивность восстановления. Граф переходов этой системы (рис. 15). Запишем систему дифференциальных уравнений:
—отказ; к — интенсивность отказа; µ — интенсивность восстановления. Граф переходов этой системы (рис. 15). Запишем систему дифференциальных уравнений: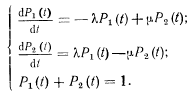
В предположении, что в момент t= 0 система работоспособна, т. е.
 , решение дифференциального уравнения имеет вид
, решение дифференциального уравнения имеет вид
Выражение для
 легко находится из последнего уравнения системы.
легко находится из последнего уравнения системы.В стационарном режиме при
 значения производных равны нулю, а соответствующие начальные условия, естественно уже никакой роли не играют. В результате, вместо системы линейных дифференциальных получается система линейных алгебраических уравнений. Изложенное справедливо только для систем с отражающим экраном.
значения производных равны нулю, а соответствующие начальные условия, естественно уже никакой роли не играют. В результате, вместо системы линейных дифференциальных получается система линейных алгебраических уравнений. Изложенное справедливо только для систем с отражающим экраном.Пример. Задана система дублирования с восстановлением (рис. 16). Граф переходов этой системы (рис. 17а).
Составляем систему дифференциальных уравнений:

При

Тогда

Следовательно,
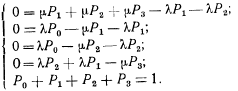
Решая систему уравнений, получаем
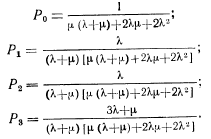
Из графа переходов системы следует, что
Для системы с поглощающим экраном, стационарного режима не существует, с ростом времени вероятность для такой системы попасть в поглощающие состояния стремится к единице.
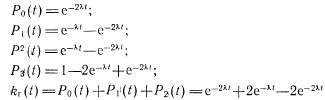
Пример. Система дублирования без восстановления (с поглощающим экраном). Граф переходов такой системы представлен «а рис. 17 6. Система дифференциальных уравнений имеет следующий вид:
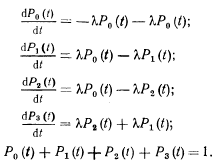
Начальные условия
 .
.В результате решения системы получаем

Если предположение об экспоненциальном законе распределения времени между событиями (отказами и восстановлением) не может быть принято, то используют для расчетов •надежности систем с восстановлением полумарковский процесс (обобщение марковского процесса).
^ 55. Методы приближенной оценки надежности цифровых устройств.
Достоверность работы цифровых устройств с тестовым диагностированием
Достоверность функционирования цифрового устройства, контроль которого осуществляется путем прохождения контрольного теста , будем определять за некоторый промежуток времени
 , где
, где  — продолжительность основной работы и прохождения теста. Возможны два варианта реализации тестового контроля (рис. 34):
— продолжительность основной работы и прохождения теста. Возможны два варианта реализации тестового контроля (рис. 34):включается основной рабочий режим (tp);
выполняется контрольный тест
 .
.Результат запоминается до окончания прохождения теста. Если тест не фиксирует наличие неисправности, дается разрешение на дальнейшее использование этого результата. Во втором случае:
вначале проводится прогон теста (tT);
затем реализуется рабочий режим '■(tp).
Выходной результат работы оценивается по результату тестирования.
Тест, составленный для проверки функционирования цифрового устройства, по отношению ко всем возможным ошибкам обладает определенной обнаруживающей способностью. Обозначим ее РОбнг. При этом предположим:
тестовым контролем устройство охвачено полностью;
отказы и сбои, происходящие в цифровом устройстве, взаимно независимы, причем потоки отказов и сбоев являются простейшими.
Введем коэффициент избыточного времени kB, который найдем как
 (38)
(38)Оценим достоверность функционирования цифрового устройства для двух рассмотренных вариантов включения теста. Для сокращения в дальнейшем первый вариант включения обозначим вариантом А, второй — вариантом Б.
Используя (5), (7) и (38), получим следующее.
Вариант А:
Если тест обеспечивает полную проверку
 , тогда
, тогда
Если тестовый контроль отсутствует (РОбнт=0), следовательно,
Вариант Б:


При РОбнт = 1 имеем

При РОбнт = 0 получим

Из анализа (40) и (42) следует, что
 для варианта А всегда больше, чем для варианта Б при любых значениях kB. Сравнение (39) и (41) показывает, что
для варианта А всегда больше, чем для варианта Б при любых значениях kB. Сравнение (39) и (41) показывает, что  при
при  для вариантов ^ А и Б одинакова; при kB>l выше достоверность функционирования варианта A, при кв<.1 — достоверность функционирования варианта Б.
для вариантов ^ А и Б одинакова; при kB>l выше достоверность функционирования варианта A, при кв<.1 — достоверность функционирования варианта Б.Таким образом, организация тестирования по варианту ^ А позволяет получить более высокую достоверность работы. Однако использование тестового контроля по варианту А далеко 'не всегда возможно (из-за необходимости задерживать выходную информацию, по крайней мере, на время
 . Поэтому остановимся на реализации тестового контроля по варианту Б.
. Поэтому остановимся на реализации тестового контроля по варианту Б.Для повышения достоверности этого варианта, прежде всего, когда
 , целесообразно ввести аппаратный контроль, который бы в период
, целесообразно ввести аппаратный контроль, который бы в период  в реальном масштабе времени определял истинное состояние цифрового устройства. Такой вид -контроля принято называть комбинированным.
в реальном масштабе времени определял истинное состояние цифрового устройства. Такой вид -контроля принято называть комбинированным.Последовательность включения тестового и аппаратного контроля определяется временной диаграммой (рис. 34). В период tT происходит обнаружение ошибок тестовым контролем с вероятностью
 , далее в период /Р — обнаружение ошибок аппаратным контролем с вероятностью
, далее в период /Р — обнаружение ошибок аппаратным контролем с вероятностью 
Информация, поступающая со средств аппаратного контроля в момент tT, во внимание не принимается, т. е. достоверность функционирования цифрового устройства в период tт оценивается только по результату тестового контроля. Заметим, что вероятности обнаружения ошибок тестовым РОбнт и аппаратным Роьа АК контролем — события взаимно независимые.
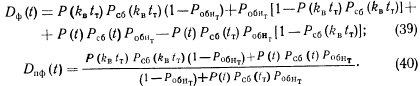
Используя (5), (7), (13), (15) и (38) для комбинированного ^контроля, можно получить расчетные формулы для показателей
 и
и  . В общем виде эти формулы из-за громоздкости не приводятся. Для крайних случаев выражения для и имеют следующий вид:
. В общем виде эти формулы из-за громоздкости не приводятся. Для крайних случаев выражения для и имеют следующий вид:тестовый и аппаратный контроль полный (т. е. РОбнт =1,


тестовый и аппаратный контроль отсутствует
Встроенный аппаратный контроль повышает достоверность работы 'цифрового устройства, но одновременно приводит к снижению его безотказности вследствие увеличения объема оборудования.
Определим оптимальное значение вводимой аппаратурной избыточности, т. е. такого значения /ги, при котором увеличение выигрыша в достоверности еще не приводит к существенному проигрышу в безотказности.
Зависимость
 от kH для различных методов аппаратного контроля дана на рис. 35. По среднему и вспомогательному верхнему графикам строим зависимости
от kH для различных методов аппаратного контроля дана на рис. 35. По среднему и вспомогательному верхнему графикам строим зависимости  ,
,  от kH (жирная сплошная для
от kH (жирная сплошная для  и жирная штриховая для
и жирная штриховая для  (0 линии). Очевидно, что
(0 линии). Очевидно, что
Тогда введение аппаратного контроля целесообразно, если
 (нижний график, рис. 35). Из этого графика следует, что имеет смысл использовать только такие методы аппаратного контроля, которые требуют
(нижний график, рис. 35). Из этого графика следует, что имеет смысл использовать только такие методы аппаратного контроля, которые требуют  , причем максимальный выигрыш в достоверности работы достигается при
, причем максимальный выигрыш в достоверности работы достигается при  .
.Рассмотрим достоверности функционирования и правильного функционирования цифровых устройств с тестовым контролем для установившегося режима работы. Цифровое устройство может в общем случае находиться в трех состояниях:
нерабочий режим (ожидание или пауза) —устройство может быть выключено либо включено, однако никакие рабочие сигналы на него не подаются и не снимаются;
дежурный режим — аппаратура включена и проводится прогон контрольного теста;
режим основной работы.
Обозначим длительности режимов ожидания, дежурного и основной работы соответственно
 , где tт — время 'прохождения теста; l>0—целое положительное число.
, где tт — время 'прохождения теста; l>0—целое положительное число.Временная диаграмма работы цифровых устройств дана на рис. 36.
Переход из режима ожидания в дежурный и из дежурного режима в основной, а также окончание основного режима происходят в произвольный момент времени в зависимости от конкретной реальной обстановки. Отсюда следует, что величины отрезков времени
 и
и  распределены по случайному закону.
распределены по случайному закону. , где г и s целые положительные числа
, где г и s целые положительные числа  . Обозначим
. Обозначим  . Примем, что начало отсчета времени t совпадает с моментом окончания последних регламентных или профилактических работ, которые обеспечивают полное восстановление работоспособности цифрового устройства.
. Примем, что начало отсчета времени t совпадает с моментом окончания последних регламентных или профилактических работ, которые обеспечивают полное восстановление работоспособности цифрового устройства.Будем оценивать работу цифрового устройства по временным отрезкам
 и
и  . Граф, описывающий работу устройства по этим отрезкам в соответствии с временной диаграммой (рис. 36) и принятую стратегию обслуживания, представлен на рис. 37 а. На графе состояние Po(t) —состояние работоспособности на отрезке времени
. Граф, описывающий работу устройства по этим отрезкам в соответствии с временной диаграммой (рис. 36) и принятую стратегию обслуживания, представлен на рис. 37 а. На графе состояние Po(t) —состояние работоспособности на отрезке времени  — состояние отказа на отрезке времени
— состояние отказа на отрезке времени  , который может быть обнаружен тестовым контролем;
, который может быть обнаружен тестовым контролем;  —состояние отказа на отрезке времени
—состояние отказа на отрезке времени  , который не может быть обнаружен тестовым контролем;
, который не может быть обнаружен тестовым контролем;  —состояние работоспособности на отрезке времени
—состояние работоспособности на отрезке времени  —состояние отказа на отрезке времени
—состояние отказа на отрезке времени  , который может быть обнаружен тестовым контролем;
, который может быть обнаружен тестовым контролем;  —состояние отказа на отрезке времени
—состояние отказа на отрезке времени  , который не обнаруживается тестовым контролем;
, который не обнаруживается тестовым контролем;  —состояние отказа обнаруживаемого нетестовыми методами контроля в период проведения регламентных работ.
—состояние отказа обнаруживаемого нетестовыми методами контроля в период проведения регламентных работ.Если при тестовом контроле обнаружен отказ, то устройство немедленно переходит в режим восстановления. На графе
 —интенсивность отказов;
—интенсивность отказов;  — интенсивность восстановления;
— интенсивность восстановления;  — интенсивность обнаружения отказов нетестовыми методами контроля, причем
— интенсивность обнаружения отказов нетестовыми методами контроля, причем (43)
(43)где s — число полных циклов (циклов, включающих кроме отрезков времени tп и tд, время ожидания tп) до проведения очередных регламентных работ.
При числе циклов г=1 вид графа упростится за счет исключения петель в состояниях P1'{t). и P2'{t). Переходы с интенсивностью
 из состояний P1'{t). и P2'{t) в состояния Р0(t) и Р2(t) соответственно происходят только через г циклов. До достижения г циклов переходы с интенсивностью
из состояний P1'{t). и P2'{t) в состояния Р0(t) и Р2(t) соответственно происходят только через г циклов. До достижения г циклов переходы с интенсивностью  из состояния P1'{t). и P2'{t) осуществляются в те же состояния.
из состояния P1'{t). и P2'{t) осуществляются в те же состояния.Для учета частоты переходов из состояний P1'{t). и P2'{t) в состояния Р0(t) и Р2(t) соответственно введем коэффициент

Предположим, как и в предыдущем параграфе, что потоки отказов, обнаружения (нетестовыми методами контроля) и восстановления — простейшие, а закон распределения временных отрезков
 экспоненциальный. Тогда можно утверждать, что процесс, описываемый графом (см. рис. 37 а), —марковский.
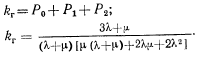
экспоненциальный. Тогда можно утверждать, что процесс, описываемый графом (см. рис. 37 а), —марковский.Составляя по графу систему дифференциальных уравнений (из-за громоздкости система уравнений не приводится), и, решая ее для стационарного режима работы аппаратуры, получим
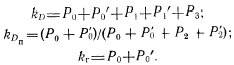
Развернутые выражения для расчета
 и kr из-за громоздкости не приводятся, они даны в [8]. По этим формулам и с учетом (43) можно найти значение предельного числа полных циклов s, по истечению которых необходимо проводить регламентные работы.
и kr из-за громоздкости не приводятся, они даны в [8]. По этим формулам и с учетом (43) можно найти значение предельного числа полных циклов s, по истечению которых необходимо проводить регламентные работы.Граф цифрового устройства с тестовым контролем по периодам времени /„, гл и /р ^представлен на рис. 37 6, где
 , из которого следует:
, из которого следует: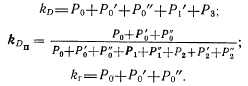
Для цифрового устройства с комбинированным контролем граф состояний будет иметь вид, приведенный на рис. 38. При этом полагается, что в режиме тестового контроля
 информация, получаемая от средств аппаратного контроля, во внимание не принимается.
информация, получаемая от средств аппаратного контроля, во внимание не принимается.Из графа на рис. 38 запишем
Если решить системы дифференциальных уравнений относительно состояний цифрового устройства для графов на рис. 37 6 и рис. 38 и принять во внимание, что показатели kD, kDn и kT для цифрового устройства с комбинированным контролем должны быть выше соответствующих показателей для цифрового устройства с тестовым контролем, то можно найти предельное допустимое значение 'коэффициента избыточного оборудования
 , при котором введение аппаратного контроля целесообразно.
, при котором введение аппаратного контроля целесообразно.