
Д. Ф. Устинова выпускная квалификационная работа Милушкова Виталия Игоревича Фамилия, Имя, Отчество студента Тема диплом
| Вид материала | Диплом |
Содержание1.2 Структура системы моделирования поиска экологических аномалий 1.3 Формирование требований к программному обеспечению визуализации результатов моделирования |
- Малинникова Ирина Сергеевна (фамилия, имя, отчество студента) диплом, 1787.01kb.
- Косачев Дмитрий Владимирович (фамилия, имя, отчество) Тема диплом, 753.81kb.
- Конкурс песни «Евровидение-2010», 18.6kb.
- Диплом серия № от г, 6.18kb.
- Бланк рекомендующей организации, 10.24kb.
- Института Психиатрии Министерства Здравоохранения Российской Федерации установлено:, 21.9kb.
- Требования к оформлению реферата, 18.92kb.
- Фамилия: Cтач Имя,отчество: Павел Петрович, 11.07kb.
- Уважаемые члены экзаменационной комиссии!, 16.89kb.
- Пример резюме оператора пк фамилия Имя Отчество Год рождения, 35.29kb.
1.2 Структура системы моделирования поиска экологических аномалий
Моделирующая система поиска экологических аномалий предназначена для моделирования движения корабля-носителя СПК в заданной экологической обстановке. Она включает в себя модель среды, включая модель источника загрязнения с соответствующими параметрами, динамическую модель исследовательского корабля-носителя АНПА, с которого выпускается АНПА, динамическую модель АНПА.
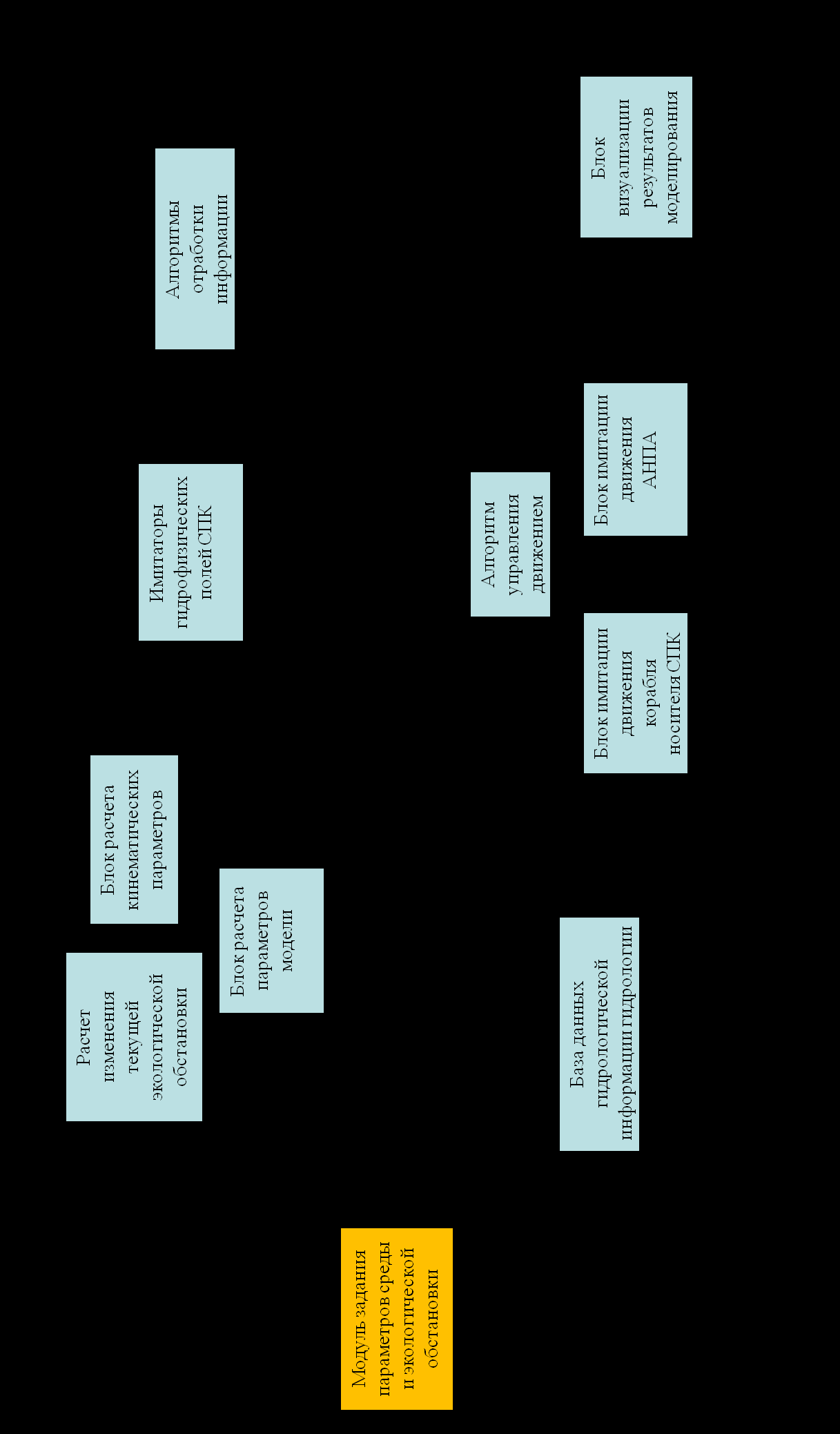
На рисунке 5 представлена укрупнённая структура моделирующей системы.
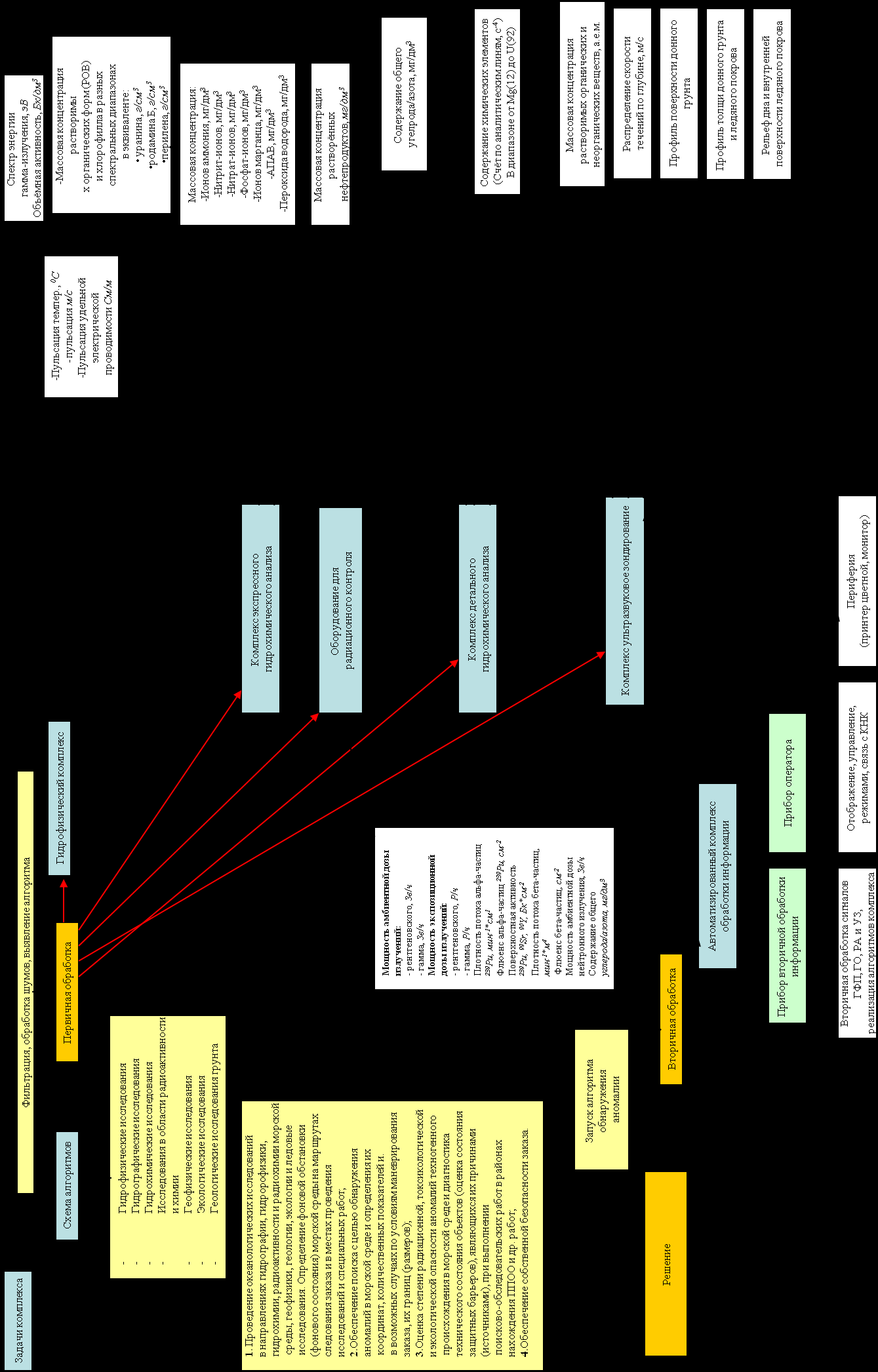
Первоначально в модуле "задания параметров среды экологической обстановки" задаются параметры среды и источника загрязнения. К параметрам среды относятся скорость течений, плотность воды, координаты района, параметры источника загрязнения (ЭА) "подвижный"-"неподвижный", его скорость, если он подвижный, координаты, область загрязнения, скорость истечения загрязняющих веществ (ЗВ), какое это ЗВ, его количественный состав [17].
Из этого модуля данные передаются в базу данных ГИС-гидрологии откуда получают гидрологические параметры, необходимые для дальнейшего моделирования. Также данные из модуля "задания параметров среды экологической обстановки" передаются в блок расчёта кинематических параметров, в котором постоянно пересчитываются параметры для задания текущей экологической обстановки и местоположения корабля-носителя СПК. Данные от блоков "База данных гидрологической информации гидрологии", "Расчет измерения текущей экологической обстановки", "Блок расчета кинематических параметров" передаются в блок расчёта параметров моделей, где осуществляется расчёт динамической модели движения ИПЛ, АНПА, ЭА, данные о среде. Далее имитируется работа измерительных каналов СПК с помощью имитаторов гидрофизических полей. Сигналы с выхода имитаторов подаются на алгоритмы обработки информации, где реализуется обработка данных в соответствии со штатными алгоритмами СПК и принимается общее решение по совокупности задействованных алгоритмов. С выхода блока "Имитаторы гидрофизических полей СПК" передаются параметры на алгоритмы управления движением и в блок визуализации в зависимости от той или иной задачи корабля-носителя СПК. С выхода алгоритмов управления движением информация поступает на блок имитации движения корабля-носителя СПК. Далее информация передаётся в блок имитации движения АНПА. На последнем этапе визуализируются результаты работы моделирующей системы [15].
Учитывая наличие большого числа динамических моделей, кораблей-носителей СПК, АНПА, ЭА и т.п., необходимо сформировать требования при визуализации результатов моделирования.

1.3 Формирование требований к программному обеспечению визуализации результатов моделирования
Для формирования требований к визуализатору результатов моделирования поиска ЭА определим интересующие режимы работы СПК, расположенном на АНПА при решении некоторых задач, сформулированных в п. 1.1.1. К ним относятся следующие:
- Обнаружение и классификация ЭА
- Выход на источник загрязнения
- Обследование трасс трубопроводов и кабельных линий
- Определение размеров и координат ППОО
- Взятие проб для подробного анализа
- Инспекция подводных сооружения
Общими требованиями к визуализатору во всех режимах работы является необходимость обзора и освещения области поиска при движении по акватории. При этом источник освещения должен акцентировать внимание на важных для анализа деталях. При нахождении ЭА или искомого объекта должна подсвечиваться траектория движения АНПА. При движении по траектории должны отображаться метки, отражающие срабатывание тех или иных алгоритмов СПК, метки, в которых содержится информация о скорости движения АНПА, его координатах, его ресурсе, метки, характеризующие область ЭА.
Также необходимо осуществлять видеозапись результатов моделирования для создания возможностей одновременной работы нескольких операторов с данной экологической ситуацией, для демонстрации результатов моделирования при их представлении. При этом данный визуализатор должен быть достаточно экономичным и иметь широкие возможности для модификации.
Рассмотрим особенности изложенных требований при различных режимах работы СПК.
Режим отладки характеризуется тем, что он должен давать возможность отрабатывать вновь разрабатываемые и существующие алгоритмы инженерам. При этом работа остальных алгоритмов может осуществляться в штатном режиме. В этом режиме обзор должен охватывать достаточно большую площадь исследуемой акватории, по траектории движения автономного необитаемого подводного аппарата должны расставляться метки, характеризующие срабатывание только исследуемого алгоритма. Освещение целесообразно всей рабочей области автономного необитаемого подводного аппарата.
В режиме обнаружения и классификации ЭА обзор также должен охватывать большую площадь исследуемой акватории, при этом должна подсвечиваться область ЭА. Траектория движения АНПА в этом режиме должна подкрашиваться при приближении к источнику ЭА. В случае выхода за границы области обнаружения ЭА, траектория должна становиться обычной. В этом режиме срабатывают алгоритмы первой ступени на основе удельной электрической проводимости, водородного показателя и содержания растворенного кислорода, а также гидрохимические алгоритмы, реагирующие на конкретное загрязняющее вещество. Целесообразно отмечать срабатывания алгоритмов и следующие параметры: дальность до источника ЭА, подвижная/неподвижная ЭА, наименование загрязняющего вещества, концентрация ЗВ, скорость истечения ЗВ, горизонт расположения ЗВ.
При выходе на источник загрязнения необходимо обнаруживать и отслеживать предполагаемые местонахождения источника ЭА. Конкретное местоположение источника ЭА должно быть хорошо освещено. Траектория движения корабля-носителя при обнаружении источника, при нахождении рядом с источником должна подкрашиваться, а при выходе за границы области обнаружения ЭА становится прежней. При этом срабатывают алгоритмы первой ступени удельной электрической проводимости, водородного показателя и содержания растворенного кислорода. Целесообразно отмечать срабатывания алгоритмов и следующие параметры: дальность до источника, "подвижная"-"неподвижная" ЭА.
При работе в режиме обследования трасс трубопроводов и линий обзор должен охватывать область исследуемого объекта, при этом объект должен подсвечиваться также как и прилегающая область. В данном режиме срабатывают алгоритмы на основе определения удельной электрической проводимости, водородного показателя и содержания растворенного кислорода. При движении траектория АНПА должна подкрашиваться в случае приближения к обследуемому объекту, на ней должны отображаться метки срабатывания алгоритмов и следующие параметры: размеры трасс трубопроводов и линий, расстояние до них от АНПА, ресурс хода АНПА по всей траектории движения.
В режиме определения размеров и координат ППОО обзор должен проводиться в пределах исследуемого ППОО. Траектория движения АНПА должна подкрашиваться при приближении к объекту. В этом режиме срабатывают алгоритмы первой ступени на основе определения удельной электрической проводимости, водородного показателя и содержания растворенного кислорода и гидрохимии в зависимости от конкретного ЗВ. ЗВ для поиска определяется заранее исходя из конфигурации состава аппаратуры СПК АНПА. Целесообразно отмечать срабатывания алгоритмов и следующие параметры: дальность до ППОО, признак искомого ЗВ (есть/нет), наименование загрязняющего вещества, концентрация ЗВ, скорость истечения ЗВ, горизонт расположения ЗВ, ресурс хода АНПА и его скорость.
В режиме взятия проб для подробного анализа обзор должен проводиться в пределах исследуемой области поиска ЭА, которая должна освещаться. В данном режиме АНПА берёт пробу воды или грунта в области ЭА и доставляет её на корабль-носитель. Траекторию движения АНПА целесообразно подкрашивать при приближении к местонахождению ЭА. В данном режиме срабатывают алгоритмы на основе определения удельной электрической проводимости, окислительно-восстановительного потенциала. Целесообразно отмечать срабатывания алгоритмов и следующие параметры: дальность до источника, подвижная/неподвижная ЭА.
При режиме инспекции подводных сооружений должен проводиться обзор сооружения, оно должно подсвечиваться. В данном режиме срабатывают алгоритмы на основе определения удельного электрической проводимости, окислительно-восстановительного потенциала, водородного показателя, давления, температуры. По ходу движения АНПА целесообразно отмечать срабатывания алгоритмов и следующие параметры: дальность до подводного сооружения, координаты и размеры исследуемого объекта.