
Д. Ф. Устинова выпускная квалификационная работа Милушкова Виталия Игоревича Фамилия, Имя, Отчество студента Тема диплом
| Вид материала | Диплом |
- Малинникова Ирина Сергеевна (фамилия, имя, отчество студента) диплом, 1787.01kb.
- Косачев Дмитрий Владимирович (фамилия, имя, отчество) Тема диплом, 753.81kb.
- Конкурс песни «Евровидение-2010», 18.6kb.
- Диплом серия № от г, 6.18kb.
- Бланк рекомендующей организации, 10.24kb.
- Института Психиатрии Министерства Здравоохранения Российской Федерации установлено:, 21.9kb.
- Требования к оформлению реферата, 18.92kb.
- Фамилия: Cтач Имя,отчество: Павел Петрович, 11.07kb.
- Уважаемые члены экзаменационной комиссии!, 16.89kb.
- Пример резюме оператора пк фамилия Имя Отчество Год рождения, 35.29kb.
ВВЕДЕНИЕ
Экологическая безопасность – одна из стратегических задач государства. Наряду с военной и экономической безопасностью экологическая безопасность является основой устойчивого развития страны. Одной из важнейших ее составляющих является задача повышения эффективности управления качеством окружающей среды и, в частности, водной среды.
Созданная к настоящему времени система управления качеством водной среды РФ включает в себя совокупность органов, осуществляющих контроль и принятие управляющих решений на федеральном и региональном уровнях [1]. Региональные центры охраны водной среды являются основой этой системы и осуществляют оперативный экологический контроль акваторий. Для обеспечения оперативного экологического контроля водных объектов с начала 90-х годов применяются судовые природоохранные комплексы (СПК) типа "Акватория", обеспечивающие автоматизированные измерения гидрохимикофизических параметров и концентраций основных загрязняющих веществ водной среды в режиме реального времени вдоль траектории движения корабля-носителя СПК.
Носитель, состав и характеристики СПК, специфика его конфигурации существенно зависят от особенностей патрулируемой акватории и от особенностей потенциальных источников загрязнения. В настоящее время носители СПК часто применяются на АНПА. Основной задачей оперативного экологического контроля является обнаружение областей превышения предельно допустимой концентрации загрязняющих веществ по контролируемым показателям (областей экологических аномалий) и выявление источников загрязнения. При этом источник экологических аномалий может быть как стационарным, так и подвижным, например прошедшее судно.
В программе по "развитию судостроения до 2020 года" одним из важнейших этапов при формировании облика средств носителей СПК является создание системы моделирования, оптимизации, выбора, обоснования вновь разрабатываемых СПК. В ЗАО "Фирма-7" (Санкт-Петербург) с середины 90-х г.г. разрабатывается система моделирования поиска экологических аномалий, позволяющая решать задачи, связанные как с отработкой, комплексным анализом алгоритмов обработки информации и управления автономным необитаемым подводным аппаратом, так и с обучением операторов [4]. Рассматриваемая система позволяет формировать требования к измерительным каналам, поскольку одной из её составных частей является система имитаторов, моделирующая входные сигналы СПК для различных натурных условий. Моделирующая система состоит из сотни динамических моделей: модель среды, модель загрязнения, модели измерительных преобразователей, динамическая модель носителя СПК и других. Таким образом, в настоящее время задача создания моделирующей системы СПК, позволяющей наглядно отображать изменения результатов моделирования при различных вариантах исходных данных является важной и актуальной. Для представления результатов моделирования целесообразно использовать трёхмерную визуализацию.
Целью дипломной работы является разработка программного обеспечения визуализации результатов имитационного моделирования выхода АНПА на источник экологических аномалий.
Для достижения поставленной цели должны быть решены следующие задачи:
- формирование требований к программному обеспечению визуализации движения автономного необитаемого подводного аппарата;
- выбор средства визуализации результатов имитационного моделирования;
- разработка и отладка программного обеспечения для визуализации результатов моделирования выхода автономного необитаемого подводного аппарата на источник экологической аномалии.
1 КОНСТРУКТОРСКИЙ РАЗДЕЛ
Развитие систем контроля состояния морской природной среды и прибрежных территорий является одним из приоритетов национальной морской политики. Ключевым элементом обеспечения экологической безопасности водных объектов является оперативный контроль и выявление подводных потенциально опасных объектов в глубоководных районах и в шельфовой зоне с использованием СПК, располагающихся на автономных необитаемых подводных аппаратах или других кораблях-носителях, обеспечивающих измерение гидрохимикофизических параметров водной среды в реальном масштабе времени по ходу движения.
Опыт применения автономных необитаемых подводных аппаратов показал необходимость разработки программно-аппаратного имитатора работы комплекса для формирования навыков работы у операторов при решении задачи обнаружения и классификации экологических аномалий техногенного происхождения [3].
1.1 Обзор задач, решаемых при выходе автономного необитаемого аппарата на источник экологической аномалии
1.1.1 Постановка задачи обнаружения экологической аномалии
Современные требования к обеспечению экологической безопасности Российской Федерации, а также требования "Морской доктрины РФ" и "Концепции глубоководной деятельности", утвержденные президентом РФ [5], формируют модель использования СПК в различных ситуациях и определяют круг решаемых задач. К ним в первую очередь относятся:
- поисково-обследовательские, природоохранные, подводные, научно-исследовательские и специальные работы;
- океанологические и другие исследования;
- получение данных о ППОО.
В зависимости от сфер применения, описанных выше, СПК расположенный на АНПА способен решать следующие задачи [7]:
1) Поисково-обследовательские, природоохранные, подводные, научно-исследовательские и специальные работы:
- задача обнаружения экологических аномалий (ЭА) в морской среде, определения их координат, количественных показателей, их границ (размеров) и их классификации по типу источника загрязнения "подвижный-неподвижный".
- задача выхода на точечный или подвижный источник загрязнения.
- обследование и мониторинг акваторий как в местах базирования флотов РФ, так и в других акваториях зоны экономической ответственности РФ (реки, озера, моря).
- получение данных геологических, гидрофизических, гидрохимических, радиационных, геофизических и экологических исследований на шельфе в интересах поиска и разработки полезных ископаемых;
- геодезические исследования дна мирового океана, при строительстве и инспекции подводных сооружений.
- получение данных по толщине и характеристикам льда;
- получение данных по рельефу дна, химическим и радиационным характеристикам морской среды и грунтов в заданных районах;
- получение данных по скоростям течений и коэффициентам турбулентности обмена на различных глубинах;
- обеспечение экологической безопасности буровых платформ и обслуживающих транспортных средств (обеспечивающих судов и т.п.).
- обнаружение и наблюдение за стационарными подводными объектами, подводной инфраструктурой иностранных государств.
2) Океанологические научно-исследовательские работы:
- Определение фоновой обстановки (фонового состояния) морской среды на маршрутах следования и в местах проведения исследовательских и специальных работ;
- Получение исходных данных для формирования карт с нанесенными на них границами шельфа;
- Получение данных для формирования карт районирования Мирового океана по характеристикам гидрофизикохимических и других полей с учетом сезонных изменений;
- Навигационно-гидрографическое и информационное обеспечение выполнения оборонных задач;
- Определение границ континентального шельфа, а также его исследование с целью обнаружения месторождений полезных ископаемых и определения их границ. СПК позволяют выявить наличие интересующего химического элемента в исследуемой придонной области.
3) Получение данных о ППОО:
- Оперативное уточнение местоположения ППОО с помощью акустических, или иных средств;
- Задача обследования трасс трубопроводов, кабельных линий на морском дне.
- Оценка степени радиационной, токсикологической и экологической опасности аномалий техногенного происхождения в морской среде;
- Диагностика технического состояния объектов, являющихся причинами (источниками аномалий), при выполнении поисково-обследовательских работ в районах нахождения ППОО и других работ;
- Оперативное получение объективной информации о характере и интенсивности воздействия аварийного объекта на морскую среду, обеспечение локализации границ этого воздействия;
- Оперативное информационное обеспечение спасательных работ;
- Оперативное информационное обеспечение работ по ликвидации.
Анализ показывает, что решение каждой из перечисленных задач требует использования соответствующей аппаратной (приборной) части СПК, необходимых специализированных программных комплексов и соответствующих методик проведения работ. В зависимости от конкретного вида работ и места их проведения существенно меняются как виды и технические возможности используемых носителей СПК: надводные суда, ИПЛ, автономные необитаемые подводные аппараты, обитаемые глубоководные аппараты, стационарные платформы, буйковые станции и др., так состав и технические характеристики информационно-измерительных каналов.
Модель использования СПК предполагает двухэтапное решение задачи поиска и выявления ЭА. На первом этапе на основе исследования интегральной характеристики водной среды – УЭП выявляется зона загрязнений и осуществляется классификация возможного источника ЭА ("подвижный" – "неподвижный"). На втором этапе включается "тонкая ступень" анализа (более затратная) для определения состава загрязнений и измерения концентраций загрязняющих веществ, определяющих нанесённый ущерб природной среде.
Так, например, во внутренних и прибрежных акваториях СПК, в основном, используются для обнаружения и классификации источников загрязнения. При этом СПК размещается на надводном корабле. Особенностью данной конфигурации СПК является наличие буксируемой линии, которая опускается за борт с надводного корабля и в процессе движения измеряет параметры окружающей среды на нескольких горизонтах. СПК используются для контроля акваторий в местах базирования Северного флота, Черноморского флота РФ [5], а также в акваториях Ленинградской Военно-морской базы, при проведении исследований в Балтийском море в районе Борнхольской впадины при прокладке Северо-Европейского газопровода (СЕГ) [2].
В прибрежных и открытых акваториях океана решаются задачи обнаружения трубопроводов, глубоководных химических и радиоактивных загрязнений, задачи, связанные с работами на шельфе, задачи океанологических исследований. При решении этих задач применяются автономные необитаемые подводные аппараты, глубоководные обитаемые аппараты (ГОА), а также ИПЛ, оснащенные СПК [3].
В состав СПК, размещаемого на АНПА или ГОА дополнительно входит канал телеметрии, гидрооптический канал, ультразвуковой канал (УЗК), в составе аппаратуры имеется датчик угловой скорости, предназначенный для передачи сигналов в систему управления подводных аппаратов. АНПА и ГОА используются в задачах поиска и обследования трубопроводов, разведки месторождений, поиска и обнаружения глубоководных загрязнений химическими и радиоактивными отходами. АНПА находят широкое применение при проведении поисковых работ, в геодезических исследованиях дна мирового океана, при строительстве и инспекции подводных сооружений [4].
Особенностью применения АНПА и ГОА является ограниченное время на решение поставленных задач – всего несколько часов. Работа СПК на борту ГОА осуществляется на глубинах до нескольких километров, под давлением в несколько сотен атмосфер. При этом невозможно выставлять и настраивать вручную параметры алгоритмов обработки информации СПК, поэтому все функционирование СПК должно осуществляться в автоматическом режиме.
Особенность применения СПК на ИПЛ заключается в решении задачи океанологических исследований, при поиске и обнаружении ЭА, обследовании трубопроводов, при поиске и обнаружении затопленных кораблей с химическими и радиоактивными отходами.
При поиске ППОО, например трубопровода, ИПЛ находит область возможного нахождения ЭА, обходит обнаруженную область. Для более детального и подробного определения местоположения объекта на морском дне в заданную область с борта ИПЛ запускается АНПА. С его помощью проводится анализ и обнаружения местоположения трубопровода. При этом время, за которое ИПЛ решает эти задачи, ограничено несколькими сутками.
Для ИПЛ, как правило, не стоит задача только обнаружения и классификации ЭА. Они, в основном, применяются для определения границ шельфа, для исследования и обнаружения месторождений полезных ископаемых, что предполагает работу СПК в сложных климатических условиях, в том числе подо льдами Северно-Ледовитого океана. При этом СПК может работать в автоматизированном режиме с участием оператора. Функционирование СПК определяется соответствующими алгоритмами обработки информации (АОИ).
При разработке новых АОИ, при отработке аппаратуры СПК с учетом сложной природы анализируемых нестационарных сигналов ГФ полей возникает необходимость моделирования как экологической обстановки (для отработки СПК в целом), так и имитации сигналов датчиков ГФ полей СПК (для отработки алгоритмов).
1.1.2 Особенности применения автономного необитаемого подводного аппарата
Рассмотрим более подробно особенности применения автономного необитаемого подводного аппарата при решении задач перечисленных в разделе 1.1.1.
Современные многоцелевые АНПА представляют собой новый класс подводных робототехнических объектов с присущими им задачами и практическим применением, особенностями технологии и составом систем. При этом системы, входящие в состав АНПА и судового оборудования, отличаются большим разнообразием по назначению и физическим принципам их работы, что порождает достаточно жесткие и противоречивые требования к технологии конструирования и внутренней системной организации. Расширение функциональных возможностей АНПА связано также с решением ряда новых теоретических задач. В первую очередь, это задачи управления и навигации, ориентирования на местности, сбора и накопления разнообразной целевой информации о среде и, наконец, обеспечения безопасности аппарата в штатных режимах и в особых ситуациях. Необходимо отметить, что не только решение, но и сама постановка подобных задач во многих случаях еще требуют теоретических обоснований и проведения экспериментов на макетах и моделях.
Использование новых технологий значительно расширило сферу применения АНПА. В настоящее время имеется значительное число проектов и действующих разработок, ориентированных не только на ранее сложившиеся сравнительно доступные области применения, но и на выполнение совершенно новых работ по океанографии, обслуживанию различных отраслей. Одной из наиболее важных задач в этом направлении является увеличение автономности на основе более емких и возобновляемых энергоисточников. Другой не менее важной задачей является расширение функциональных свойств аппаратов, придание им функций "интеллектуального" поведения.
В настоящее время нет достаточных оснований говорить о приоритетном развитии тех или иных направлений по применению и специализации АНПА. Можно отметить определенные тенденции в использовании наряду с хорошо отработанными бортовыми системами и структурами универсальных робототехнических комплексов из относительно простых, малых и дешевых аппаратов.
Существуют различные оценки эффективности автономных аппаратов по сравнению с другими средствами, которые обычно используются для глубоководных работ. В статье [5] приводятся сведения об экономии 100 млн. долл. за 5 лет, которую, нефтяная компания Shell, могла бы получить, применяя АНПА для ряда обычных глубоководных обследований и следующих производственных задач: обследование районов для бурения скважин, маршрутов прокладки трубопроводов, сбор океанографических данных. В статье [6] приводятся результаты оценок снижения затрат благодаря применению АНПА в размере 772 млн. долл., выполненных Крисом Моттом для Kongsberg Simrad.
Для успешного применения АНПА необходимо выполнить следующие требования: технология должна обеспечивать минимальный потребительский риск и экономический эффект, аппарат должен быть относительно небольшим, надежным и достаточно универсальным, т.е. должен обеспечивать возможность функциональной перестройки. Противоречивость указанных требований достаточно очевидна.
Как показал опыт Института проблем Морских Технологий Дальневосточного Отделения Российской Академии Наук (ИПМТ ДВО РАН) по созданию автономных, телеуправляемых и буксируемых аппаратов, противоречивость ряда требований разрешается благодаря использованию унифицированных конструктивных модулей, разработанных с учетом их функционирования на борту глубоководного аппарата. Аналогичный принцип был, по-видимому, положен в основу некоторых зарубежных разработок, в частности, французского глубоководного аппарата "Epaulard" и, в дальнейшем, многих современных аппаратов, таких как американский "AUSS", канадский "Theseus" , европейский "MARIUS" [4].
При создании глубоководных АНПА стремление уменьшить массу и размеры приводит к росту числа индивидуальных разработок. Связано это с тем, что серийная аппаратура зачастую не может быть применена в качестве комплектующих элементов аппарата из-за неприемлемых масс и габаритов. Кроме того, обычной является ситуация, когда необходимая серийная продукция вообще отсутствует, а комплектующие изделия доступны только в виде недостаточно совершенных и дорогостоящих экспериментальных образцов. Другая особенность АНПА связана с необходимостью выбора компромиссных решений между универсальностью и специализацией, причем во многих случаях грань, их разделяющая, достаточно размыта. Универсальность АНПА может быть реализована двумя различными подходами в зависимости от целей, которые при этом преследуются.
Мировой опыт применения АНПА (AUV) для решения задач, связанных с геологической разведкой на больших глубинах и топографической съемкой рельефа дна, заключается в основном в проведении опытно-методических работ, демонстрирующих большие преимущества АНПА по сравнению с другими видами подводных технических средств. Достаточно наглядным примером может служить автономный аппарат "Hugin" [8], созданный в норвежском центре подводных технологий при поддержке фирмы "Simrad" для работ на глубинах до 3000 м. Большинство существующих в настоящее время зарубежных автономных подводных аппаратов аналогичного назначения рассчитано для работы на глубинах менее 3000 м.
Вместе с тем специалистами признается огромное значение, которое могут иметь АНПА при геологических и геодезических работах в глубоководных районах, богатых залежами полезных ископаемых и отличающихся исключительным разнообразием геологических форм рельефа дна и активных процессов в районах вулканической деятельности. Так, например, по данным рифтовая зона Центрально-Атлантического хребта характеризуется наличием нескольких низко и высокотемпературных сульфидных источников, богатых разнообразным составом редких металлов. Специалистами-геологами признается также исключительная актуальность использования АНПА для детального изучения гидротермальных систем, располагающихся на склонах подводных вулканов и в разломах земной коры.
Обширные работы в этом направлении проводятся KORDI (Республика Корея), и для разведки железомарганцевых корок и конкреций в Микронезии в 1998 г. использовался АНПА "ОКРО 6000", созданный по совместному (с "DAEWOO") российско-корейскому проекту [6].
В перспективе аппараты подобного назначения кроме обычных задач могут решать задачи геомагнитных и гравиметрических измерений, акустического профилирования дна, съемки геологических разломов и наблюдения за процессами вулканической деятельности. Практический опыт разработки и использования АНПА в данной области пока еще довольно беден, и сама постановка задач требует проведения сложных технических экспериментов. Как показывают опенки специалистов, АНПА могут с успехом применяться для исследования активных процессов в районах колоссального скопления газовых гидратов (Охотское море), и это направление можно считать одним из наиболее приоритетных как в отношении геологических перспектив, так и в отношении экологического мониторинга водной среды.
Исследовательские океанографические задачи, связанные с широкомасштабными измерениями параметров среды в водной толще и вблизи дна, относятся к числу наиболее трудоемких, присущих АНПА. К преимуществам АНПА при выполнении такого рода работ можно отнести [9]:
- возможность производства прецизионных измерений в сочетании с высокой точностью навигационной привязки;
- организацию планомерной сети траекторий, дающей достоверную картину распределения исследуемых характеристик водной среды;
- возможность оперативного мониторинга и документирования информации для освещения подводной обстановки.
В настоящее время существует достаточно широкий класс многоцелевых исследовательских аппаратов, использующихся для океанографических измерений, как на шельфе, так и на больших глубинах. Примером может служить создание в США серии аппаратов "Odyssey", (Массачусетский технологический институт). "Осеап Voyager 2", "Осеап Explorer" (Флоридский океанографический университет), "REMUS" (Океанографический институт Woods Hole), совместно применявшихся в ряде океанографических экспериментов, в т. ч. по программе военно-морского океанографического управления NAVYOCEANO[8]. По перспективным проектам предполагается использование комплекса таких аппаратов для изучения активных придонных источников (например, гидротермалей), обследования нефтяных разработок, исследования широкомасштабных океанических структур, акустической томографии, мониторинга водной среды. Очевидно, что столь многообразные применения аппарата могут быть реализованы только при высоком уровне организации всей системы управления на основе многопроцессорной бортовой вычислительной сети и ее способности к реконфигурации применительно к различным задачам.
Известны эксперименты [12], иллюстрирующие возможности комплексного использования нескольких аппаратов для изучения приливно-отливных процессов, океанической глубинной конвекции и ряда других динамических явлений в океане. Проведенные исследования первые в области мониторинга с применением автономных аппаратов. Вместе с тем руководителями работ отмечается, что вследствие пространственной и временной изменчивости океана, а также больших масштабов этих явлений проводимые эксперименты оказываются недостаточными для получения полной картины исследуемых процессов и их прогнозов. Фактически актуальной становится задача развертывания широкомасштабных систем наблюдения и освещения подводной обстановки и глобального долговременного мониторинга.
К классу актуальных задач использования АНПА в области морской геологоразведки относится поиск месторождений нефти, газа и газогидратов. По результатам измерений экспресс-анализа выделяются площади, перспективные на поиск нефти, газа и газогидратов. Кроме того, по этим данным и в комплексе с другими геологическими и геофизическими характеристиками можно прогнозировать возможность эпизодов землетрясений и, соответственно, цунами.
Экологический мониторинг водных акваторий предполагает измерение гидробиологических, гидрохимических и гидрофизических параметров среды с последующим картографированием данных [7]. Наиболее эффективно подводные роботы могут быть применены для экологического мониторинга водной среды в придонных слоях, включая оценку гидрохимического состояния воды по параметрам, определяемым с помощью датчиков и характеризующим состояние экосистемы: содержание кислорода, соленость, кислотность, температуру, электропроводность, мутность воды, концентрацию хлорофилла. Важны также комбинированные исследования на испытательных полигонах с применением традиционных методов и подводных технических средств [9]. Это позволяет количественно отследить взаимосвязи между экологическими параметрами и затем распространять полученную с помощью подводных роботов информацию на всю акваторию с учетом биологических взаимосвязей и характеристик грунта.
1.1.3 Научное оснащение для работы автономного необитаемого аппарата на источник экологической аномалии
В зависимости от решаемой задачи комплекс научного оборудования может содержать измерители параметров водной среды и приборы для изучения свойств приповерхностных слоев грунта и донных объектов. Обычно в состав такого комплекса входят информационно-измерительная система (ИИС) и система технического зрения (СТЗ). Основу ИИС составляют измерители гидрологических параметров (ИГЛ), например CTD-измерители, в зарубежных странах, которые предназначаются для определения электропроводности (conductivity), температуры (temperature), глубины (depth) и широко применяются при изучении и освоении природных ресурсов Мирового океана [9].
Геофизические приборы, которые могут входить в состав ИИС, отличаются большим разнообразием как по физическим принципам, так и по модульному исполнению. К ним относятся, в частности, акустический профилограф течений, устройства электромагнитного поиска, магнитометры, гравиметры, радиометры, накопители и средства обработки информации. Некоторые из указанных устройств разрабатываются в морском исполнении для оснащения буксируемых систем. По техническим характеристикам, главным образом по массам и размерам, они во многих случаях оказываются малопригодными для установки на АНПА. Кроме того, существенными являются сами условия работы этих устройств на борту АНПА. В частности, это относится к магнитометрам, гравиметрам и электромагнитным устройствам, работа которых зависит от собственных физических полей носителя и его движения вблизи дна. В связи с этим в большинстве случаев возникает необходимость в специальных разработках с учетом конкретных требований проекта и технологических особенностей АНПА [8].
В состав системы технического зрения АНПА могут входить разнообразные устройства, обеспечивающие обзор и съемку дна в зависимости от характера и цели проводимой работы, а также выработку визуальной информации, необходимой для управления аппаратом. Визуальная информация представляется в виде акустических или видеоизображений и при работе в режиме реального времени используется системой управления. В наиболее полной конфигурации СТЗ представляет собой модульную интегральную систему, объединяющую гидролокаторы бокового, секторного (кругового) обзора, батиметрический гидролокатор, акустический профилограф, фото и видеосистемы, другие поисковые измерительные устройства. Подавляющая часть данных приборов требует специальной разработки с учетом особенностей АНПА, и лишь в отдельных случаях может быть использована готовая продукция. К перечисленным системам и устройствам следует, очевидно, добавить разнообразнейшее по составу и функциональным свойствам базовое оборудование, обеспечивающее навигацию, управление и связь. Нужно отметить, что головной разработчик современных "интеллектуальных" АНПА выступает фактически в роли координатора усилий специализированных предприятий, поставляющих различные виды научного оборудования, создаваемого по требованиям головного разработчика.
Как правило, в составе современных подводных аппаратов используются навигационные комплексы, включающие бортовые автономные, гидроакустические и спутниковые системы навигации. Так, на автономном аппарате "Hugin" фирмы "C&C" используется инерциальная навигационная система (IPS) на оптоволоконных гироскопах, которая интегрирована с доплеровским лагом RD Instruments, датчиком глубины, датчиком высоты и акустической системой с ультракороткой базой (USBL) фирмы "Konsberg Simrad". Фирма "Maridan" вместе с Датским техническим университетом и "Kearfott Guidance and Navigation Corporation", США, разработала систему "Marpos" для установки на борт AUV. "Marpos" это комплексированная доплеринерциальная система, ядром которой является высокоточная бесплатформенная инерциальная навигационная система KN5053 с лазерными гироскопами, Разработанная компанией "Kearfott" [11]. ИНС корректируется данными доплеровского лага RDI, который измеряет скорость аппарата над грунтом или относительно воды, а для поверхностной навигации используется приемник DGPS [12].
Аналогичная идеология использована при разработке аппарата "Oracle" фирмы "ThalesBluefin", на котором основу навигации составляет система "Litton LN250 MIMU", состоящая из трех волоконнооптических гироскопов и трех акселерометров, установленных на инерциальном блоке [15]. В состав навигационной системы входят, кроме того, цифровой кварцевый датчик давления (глубины), акустическая система позиционирования с ультракороткой базой, высокочастотный доплеровский лаг.
Аналогичная архитектура навигационной системы используется в аппарате, создаваемом объединением фирм "Boeing Company", "Fugro GeoServices Inc.", "Oceaneering International Inc.". Она основана на полной интеграции всех имеющихся измерителей, включая IPS, доплеровский лаг, датчик высоты, датчик глубины, системы с длинной и ультракороткой базой.
Как отмечается в работе, одним из самых совершенных устройств, входящих в состав всех интегральных систем, является доплеровский абсолютный лаг, производимый фирмой " RD Instruments". Фирма установила свои лаги "Workhorse" на более чем 90% мирового флота AUV и более чем на 100 аппаратах типа ROV [13].
Многолетний опыт ИПМТ ДВО РАН по созданию подводных аппаратов это и опыт разработки и эксплуатации навигационных средств. Созданные за прошедшие годы навигационные средства имели различные характеристики по дальности действия и точности, существенно отличались подходами к построению систем, но в целом были направлены на решение задач, обеспечивающих надежную и достоверную навигационную поддержку АНПА различного назначения. По опыту всех предшествующих работ перечень этих задач включает следующее [16]:
- определение и отображение на борту обеспечивающего судна текущего местоположения АНПА в условиях мелкого и глубокого моря;
- безопасное плавание и выполнение рабочих миссий вблизи дна и донных препятствий;
- управление ходом миссии с борта судна;
- получение на борту судна минимальной информации о состоянии систем АНПА;
- определение текущих координат АНПА на его борту;
- повышение оперативности и расширение районов работ навигационной системы за счет отсутствия стационарно установленных средств (маяков);
- высокоскоростной обмен информацией между АНПА и судном по гидроакустическому каналу связи;
- приведение аппарата в зону действия гидроакустических средств и обеспечение связи для управления в ближней зоне.
В состав навигационного оснащения аппаратов, создаваемых в ИПМТ ДВО РАН, входят элементы бортовой автономной, гидроакустической и спутниковой систем навигации. Каждая из систем в свою очередь представляет собой комплекс устройств, входящих в общий базовый состав систем АНПА и судового оборудования [17]. Схема навигационного оснащения АНПА показана на рис 1.
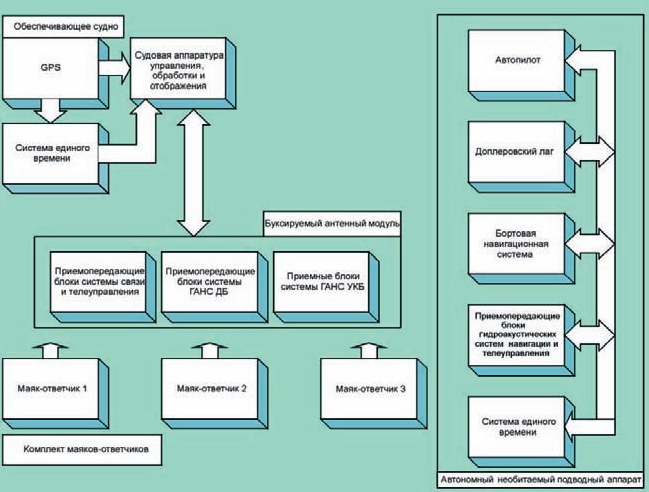
Рисунок 1 - Схема навигационного оснащения АНПА
Значительный прогресс в разработках систем энергопитания привел к появлению АНПА с дальностью действия в сотни километров и автономностью в десятки и сотни часов. Применение обычного комплекса гидроакустических систем с длинной и ультракороткой базами при выполнении долговременных миссий становится либо невозможным, либо нерациональным [20]. При таком сценарии работ необходимо использование ИНС на борту аппарата совместно с доплеровским лагом для измерения абсолютной скорости. Коррекция навигации производится по данным GPS с обсервациями на поверхности или на глубине по данным сети опорных маяков, размещенных вдоль трассы движения. Навигационное бортовое оборудование АНПА показано на рисунке 2.

Рисунок 2 - Навигационное бортовое оборудование АНПА
Кроме того, АНПА дальнего действия целесообразно оснастить средствами приема и, по возможности, излучения низкочастотных акустических сигналов с дальностью распространения не меньше, чем дальность действия аппарата, в качестве средства дальнего приведения к борту обеспечивающего судна.
Проблема докования требует от навигационного обеспечения значительно более высокой точности, поддержки супервизорного режима управления средствами двухсторонней связи, идентичности отображения навигационной обстановки на бортах аппарата и ОС, высокой оперативности. Для решения этих задач средства навигации и связи должны быть высокочастотными, их рабочая дальность обычно не превышает сотен метров.
Важную роль в составе средств навигационного обеспечения играет гидроакустическая система связи (ГАСС), использующая каналы связи в режимах командного и информационного высокоскоростного обмена между АНПА и обеспечивающим судном. Так, в информационном канале для контроля работы обзорно-поисковых систем АНПА (ТВ, ГБО) скорость передачи должна быть максимальной при умеренных требованиях к вероятности ошибки (10-1-10-2) [7]. В командном канале (навигация, телеметрия, телеуправление) скорость может быть снижена в десятки раз с ужесточением требований по допустимой вероятности ошибки до 10-3-10-4 [7].
Общие подходы в разработке аппаратуры ГАСС основаны в настоящее время на широком использовании современных программно-аппаратных средств, что позволяет компактно реализовать основные результаты, которые достигнуты за более чем тридцатилетнюю историю разработок гидроакустических систем связи. В первую очередь это предварительная обработка передаваемой информации, увеличение информационной емкости сигналов за счёт применения многопозиционной фазово-частотной манипуляции, использование эквалайзеров для адаптивной коррекции характеристик канала связи, внедрение элементов помехоустойчивого кодирования, применение сложных помехоустойчивых сигналов [8].
1.1.4 Интеллектуализация автономного необитаемого подводного аппарата
При проведении подводных работ как в мелком море, так и на больших глубинах (вплоть до предельных глубин океана) принципиальное значение имеет степень информационной автономности подводного робота, т. е. его способность самостоятельно действовать в неизвестной или недостаточно определенной среде. В настоящее время задания для АНПА формируются с использованием императивных методов программирования (как текстовых, так и графических), детально описывающих последовательность действий робота, которые нужно совершить для достижения требуемой цели. При этом представление о самой цели имеет только оператор АНПА, который составляет задание. Подобная технология эффективна, если работа робота осуществляется в рамках априорного сценария. В остальных случаях она может либо вообще не выполниться, либо выполниться с большими нарушениями и угрозой безопасности аппарата. Поэтому для выполнения миссии при непредвиденных обстоятельствах исключительное значение имеет "интеллектуализация" системы управления АНПА [4].
Так, в существующих системах управления для диагностирования и идентификации оперативных ситуаций, например аварийных, используется контроль соответствия моделей процессов и их реализаций. Возникновение конфликтных признаков (рассогласований), превышающих заранее заданные пределы в течение установленного промежутка времени, свидетельствует об "аварийности" ситуации, что требует фиксированной реакции (последовательность действий) системы. Однако при возникновении одновременно нескольких конфликтных признаков авария не парируется, так как ее причина, как следствие отдельных предусмотренных аварий, не выявляется и цель не достигается. Очевидно, необходима "интеллектуализация" управления АНПА для повышения его живучести при возникновении опасных или аварийных ситуаций.
Интеллектуализация АНПА подразумевает также способность системы управления осуществлять функции анализа сцен и общей обстановки, навигации, ориентирования на местности, сбора и накопления разнообразной информации о среде. Традиционные методы управления не всегда эффективны в условиях неполной или недостоверной информации о внешней среде, при деградации части систем (отказах, авариях) или необходимости целенаправленной реконфигурации (восстанавливающего или развивающего управления).
Разрабатываются архитектуры и принципы интеллектуального управления динамическими системами, но не только в подводной тематике, но и в смежных областях, эти работы пока не в полной мере оправдывают свое название. Весьма актуальна проблема повышения потенциала управления этими системами на основе разработки новых методов динамического анализа, распознавания образов, адаптации и искусственного интеллекта.
Для "интеллектуализации" процесса поиска подводных объектов в настоящее время разработаны и используются в системах управления АНПА алгоритмы распознавания в реальном времени ограниченного класса объектов с простыми геометрическими формами или типовыми сигналами. Необходимо расширить этот класс. Кроме того, поиск и идентификация объекта сопровождаются, как правило, маскирующим воздействием помех, вариаций внешних полей и наличием ложных целей. К классу наиболее актуальных задач относятся распознавание образов на гидролокационных и фототелевизионных изображениях, получение высокоразрешающих томограмм морского дна и физических полей [16].
Создание высокоточных систем управления по наблюдениям изображений внешних физических полей еще недостаточно обеспечено адекватными методами, моделями и алгоритмами. Построены и апробированы алгоритмы обработки изображений наблюдаемых пространственных сцен сравнительно простой структуры (в основном типа "объектфон"), разработаны методы автономного управления движением на базе результатов этой обработки. Однако с учетом сложности общей задачи и возможностей бортовых ЭВМ необходимы методы навигации и алгоритмы, эффективные в реальном масштабе времени. В силу существенной нестабильности и меньшей информативности гидролокационных и телевизионных изображений в водной среде, по сравнению с оптическими и инфракрасными системами в воздухе, их обработка и распознавание значительно сложнее. Не решены также проблемы информационного обеспечения таких систем, надежности и устойчивости работы навигационных алгоритмов в условиях информационных помех.
Р
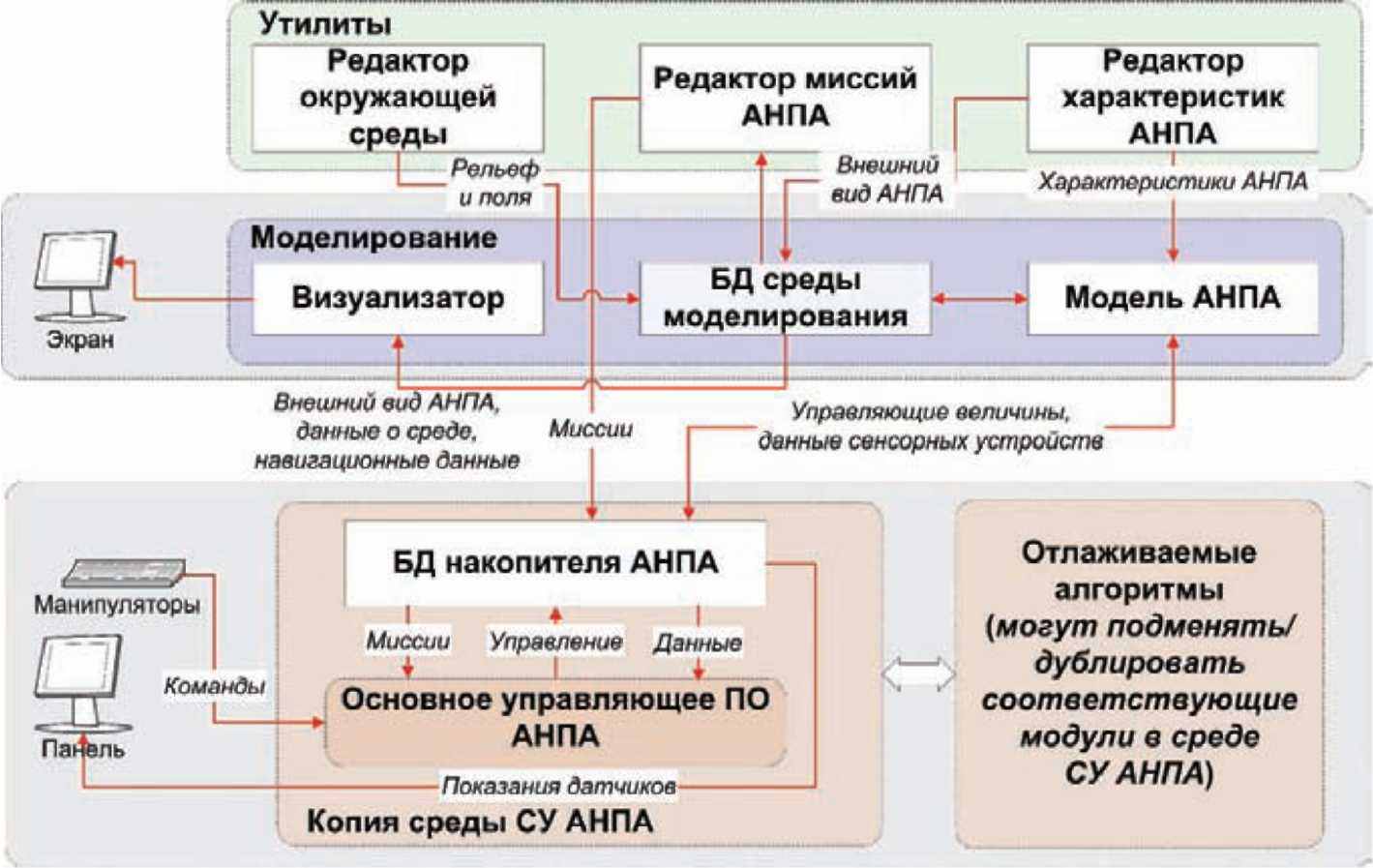
исунок 3 - Схема моделирующего комплекса системы управления интеллектуального АНПА
Одной из актуальных задач интеллектуализации системы управления АНПА является построение имитационного моделирующего комплекса, позволяющего генерировать виртуальную среду, визуализировать движение аппарата и поддерживать в режиме имитации работу сенсорных устройств. Одна из возможных функциональных версий такого комплекса отражена схематически на рисунке 3, где разными цветами показаны блоки, соответствующие отдельным задачам моделирования [13].
В ряде известных работ по созданию компьютерных тренажеров акцент делается на реализации виртуальной и усиленной реальности (Augmented Reality). В рамках проводимых исследований наряду с этим предполагается и решение более сложной задачи по моделированию работы сенсоров с последующей реконструкцией трехмерной подводной среды. Этого требует и режим телеуправления, когда оператор должен иметь текущую, постоянно обновляемую визуальную информацию об окружающей среде и состоянии объекта управления. Реконструкция пространственных объектов необходима и для решения другой принципиально важной задачи при автономном движении: планировании траектории движения средствами собственного программно-алгоритмического интеллекта робота. Очень важно при создании моделирующего комплекса в целом обеспечить универсальную возможность исследования для разных типов АНПА, различных способов управления движением, различных режимов планирования траекторий в условиях разной сложности подводной обстановки. Это накладывает определенные требования на структуру комплекса, его интерфейс, возможности редактирования моделей объектов и ведения пополняемых баз данных. Важным аспектом реализации является режим реального времени, требующий применения эффективных в вычислительном отношении алгоритмов. Дополнительный потенциал для обеспечения режима реального времени применение распределенных/параллельных вычислений [19].
1.1.5 Режимы работы судового природоохранного комплекса автономного необитаемого аппарата и автономного необитаемого аппарата
Рассмотрим режимы работы при установке СПК на корабле носителе при решении некоторых задач сформулированных в п. 1.1.1.
- Обнаружение и классификация ЭА;
- Выход на источник загрязнения;
- Целевой поиск конкретного ЗВ;
- Мониторинг акваторий;
- Океанологические исследования;
- Определение границ шельфа;
- Геодезические исследования дна.
При решении задач СПК, расположенном на АНПА, можно выделить следующие режимы работы:
- Обнаружение и классификация ЭА;
- Выход на источник загрязнения;
- Обследование трасс трубопроводов и кабельных линий;
- Определение размеров и координат ППОО;
- Взятие проб для "тонкого" анализа;
- Инспекция подводных сооружения.
В зависимости тех или иных режимов работы используются соответствующие алгоритмы обработки. Рассмотрим некоторые из них. Как было показано выше, существуют измерительные каналы первой ступени на основе измерения интегральных характеристик, предназначенные для предварительного обнаружения ЭА. С их помощью определяют наличие аномалий в водной среде и координаты местоположения этих аномалий. К ним относятся алгоритмы, основанные на обнаружении интегральных характеристик: удельной электрической проводимости (УЭП), водородного показателя (рН), окислительно-восстановительного потенциала (Еh), содержания растворенного кислорода (О2).
К выходным параметрам этих алгоритмов относятся
- наличие или отсутствие загрязнения;
- возможные координаты ЭА;
- классификатор подвижный/неподвижный источник ЭА;
- расстояние до источника ЭА;
- скорость движения подвижного источника ЭА.
На второй ступени анализа определяется наличие тех или иных загрязнений химических (хлоридов, фторидов, сульфатов, нитратов, нитритов, фосфатов, аммония, кальция, калия, натрия, бария, магния, свинца, хрома, железа, ртути, меди, цинка, никеля, марганца, кобальта, висмута, нефтепродуктов, фенолов, формальдегида, анионных поверхностно-активных веществ (АПАВ), катионных поверхностно-активных веществ (КПАВ), радиоактивных и других.
К выходным параметрам алгоритмов тонкой ступени относятся
- наличие или отсутствие загрязнения;
- наименование загрязняющего вещества;
- признак искомого ЗВ (есть/нет);
- концентрация ЗВ;
- скорость истечения ЗВ;
- горизонт расположения ЗВ.
При решении различных задач СПК, используются различные совокупности алгоритмов обнаружения информации. Применяется первичная и вторичная обработка сигналов. К первичной обработке сигналов относится фильтрация, обработка шумов, определение алгоритма. Во вторичной обработке сигналов реализуется, как правило, тот или иной алгоритм обнаружения аномалии [16].
Поиск экологической аномалии осуществляется исходя из целей применения АНПА с учетом алгоритмов обнаружения.
Схема алгоритмов обработки информации в судовом природоохранном комплексе показана на рисунке 4.
