
Конспект лекций москва 2004 удк 519. 713(075)+519. 76(075) ббк 22. 18я7
| Вид материала | Конспект |
Содержание6.3. Детерминизация недетерминированных автоматов A, то найдется конечный автомат A' |
- Учебное пособие тверь 2008 удк 519. 876 (075. 8 + 338 (075. 8) Ббк 3817я731-1 + 450., 2962.9kb.
- Тексты лекций Москва 2008 удк 339. 9(075. 8) Ббк 65. 5я73-2, 1528.45kb.
- Программно-технический комплекс Учебное пособие Новочеркасск юргту (нпи) 2010. Удк, 3911.73kb.
- Удк 152. 27 (075. 8) + 157 (075. 8) + 152. 3 (075, 60.12kb.
- Краткий конспект лекций Кемерово 2002 удк: 744 (075), 1231.26kb.
- Методические указания по курсу Новосибирск 2004 ббк ю 937. 4 Удк 152. 26 (075), 802.63kb.
- Москва 2011 ббк 63. 3 (2)я 7 к 90 удк 947 (075) История России, 110.08kb.
- Курс лекций Гродно 2005 удк 631. 1 (075., 1193.16kb.
- Удк 070(075. 8) Ббк 76. 01я73, 5789.66kb.
- Удк 339. 9(470)(075. 8) Ббк, 7329.81kb.
6.3. Детерминизация недетерминированных автоматов
Будем называть недетерминированным конечным автоматом S пятерку объектов S =
Определение цепочек, допускаемых автоматом, остается прежним, но если в детерминированном автомате последовательность конфигураций однозначно определялась заданием входной цепочки, так как из каждой конфигурации автомат мог перейти не более чем в одну конфигурацию, то в недетерминированном случае это не так. Поэтому при интерпретации определения "цепочка x допущена" как (q0,x) ├ (q, )&qK необходимо при анализе цепочки, моделируя работу автомата, перебрать варианты выполнения тактов, чтобы найти тот (или те), который приводит в заключительную ситуацию. В силу тех же соображений (тождественность движений по графу и при порождении цепочки, и при ее допускании) можем утверждать, что для любой грамматики G может быть построен конечный автомат A (в общем случае недетерминированный), такой, что L(G)=L(A) . Соответствия между параметрами грамматики и автомата остаются те же.
Возникает естественный вопрос о соотношении класса языков, допускаемых детерминированными и недетерминированными автоматами. Ясно, что для любого детерминированного автомата A существует недетерминированный A', допускающий тот же самый язык (достаточно в качестве A' взять А). Но верно ли обратное? Ответ на этот вопрос дает следующая теорема.
Теорема 3. Если L=L(A) для некоторого недетерминированного автомата A, то найдется конечный автомат A', такой, что L(A')=L(A).
Доказательство.
Пусть дан недетерминированный конечный автомат А = < Q, VT, q0, F, K>. Построим соответствующий детерминированный автомат А’=
- Q’ = P(Q) . При этом множество состояний
 будем обозначать как
будем обозначать как  .
.
- q0’=[q0].
- K’ = { /
 K }.
K }.
- F’( , a)=
 .
.
Несложно доказать методом математической индукции, что для любого i справедливо:
([q0],xy) ├iA’(B, y) B={p/ (q0, xy) ├iA(p,y)} при x=i.
Значит, для любой цепочки x
([q0],x) ├iA’(B,) B={p/ (q0, x) ├iA(p,)}.
Поэтому, в случае B K’, т.е. если x – цепочка, допускаемая детерминированным автоматом, то в исходном недетерминированном автомате существует путь из начального в конечное состояние при чтении этой цепочки и, следовательно, L(A)=L(A’).
Таким образом, сопоставляя доказанные утверждения, получаем утверждение:
Класс А-языков и класс языков, распознаваемых конечными автоматами, совпадает.
Так, например, для автомата, представленного на рис. 2, соответствующий детерминированный автомат, порождающий L(G9), представлен на рис. 4.
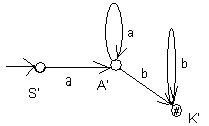
Рис.4
Для этого автомата F(S,a)= [S,A] = A’,
F([S,A], a) = [S,A] = A’,
F([S,A],b) = [A, K] = K’,
F([A,K],b)= [A, K] = K’.
Для автомата на рис. 5,а детерминированный автомат представлен на рис.5,б.
Алгоритм построения детерминированного автомата по недетерминированному.
- Строим начальное состояние q0’= [q0], помечаем его как начальное.
- Для каждого состояния qi’, построенного на предыдущем шаге, строим F(qi’, a) для всех aVT. Если для какого-нибудь из построенных состояний функция перехода ещё не построена, возвращаемся к шагу 2.
- Помечаем как конечные все состояния qi’= / K .
Конечность процесса обеспечивается конечностью множества P(Q).
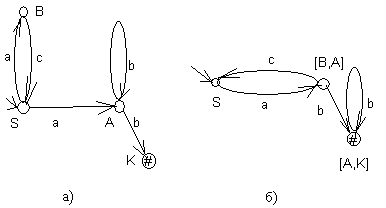
Рис.5