
Выпускной работы
| Вид материала | Реферат |
СодержаниеОбзор предметной области Обзор применения иммобилизаторов и готовых устройств, присутствующих на рынке |
- Положение о сдаче экзамена в форме защиты выпускной учебно-исследовательской экзаменационной, 39.24kb.
- Методические рекомендации по подготовке выпускной квалификационной работы бакалавра, 573.85kb.
- Методические рекомендации по выполнению выпускной квалификационной работы (дипломной, 525.53kb.
- Выпускной квалификационной работы, 5390.24kb.
- Методические рекомендации по выполнению выпускной квалификационной работы для студентов, 604.91kb.
- Методические рекомендации по выполнению выпускной квалификационной работы для студентов, 555.68kb.
- Приказ №, 1441.82kb.
- Методические указания по выполнению выпускной квалификационной работы для студентов, 551.88kb.
- Методические рекомендации по выполнению выпускной квалификационной работы по специальности:, 132.97kb.
- Методические рекомендации по подготовке и защите выпускных квалификационных работ, 320.02kb.
Обзор предметной области
Обзор применения иммобилизаторов и готовых устройств, присутствующих на рынке
В настоящее время иммобилизаторы широко применяются в системах автомобильной сигнализации, однако в этом случае их задачей является предотвращение угона, а не экстренное обездвиживание автомобиля во избежание нанесения им ущерба. Поэтому их нельзя использовать в нашем случае без существенной переделки.
Можно утверждать, что иммобилизаторы являются неотъемлемой частью современных промышленных роботов. Базовой функцией системы является обездвиживание робота в случае возникновения нештатных ситуаций.

Рисунок 2 – робот ADEPTOne
Для иллюстрации рассмотрим устройство аварийной остановки робота ADEPTOne-MV [6]. Внешний вид робота представлен на рисунке 2.
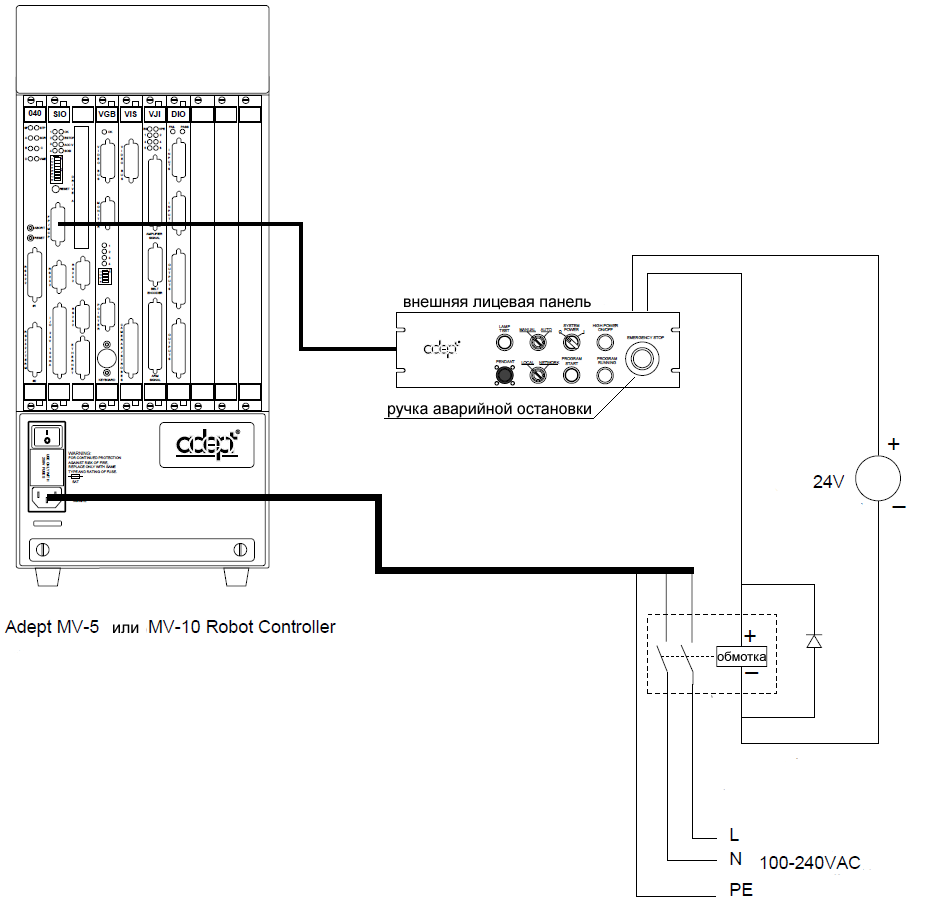
Рисунок 3 – Устройство системы аварийной остановки робота ADEPTOne-MV
На рисунке 3 приведена структурная схема подсистемы аварийной остановки (иммобилизатора) робота ADEPTOne-MV. Подсистема имеет независимый источник питания и при повороте ручки «emergency stop» коммутирует цепь питания робота, что и приводит к его остановке. Рассмотренная выше система проста и надежна, однако, в более сложных промышленных роботах или на заводах, включающих в себя много роботов, это не лучшее решение.
В настоящее время имеется тенденция использовать специализированные сети безопасности, основанные на стандартных промышленных сетевых технологиях, интегрированных в системы управления оборудованием [5], что существенно расширяет функциональные возможности по сравнению со стандартной сигнализацией с прямым подключением.
Рисунок 4 иллюстрирует старый подход (слева), когда для каждого датчика и кнопки отключения используется отдельный провод и новый (справа), когда используются уже существующие высокоскоростные цифровые сети для передачи аварийных сигналов наряду с обычными данными. Такая архитектура подсистемы безопасности позволяет не только снижать расходы на установку и кабельные соединения, но и открывает возможности для использования новых методов диагностики.
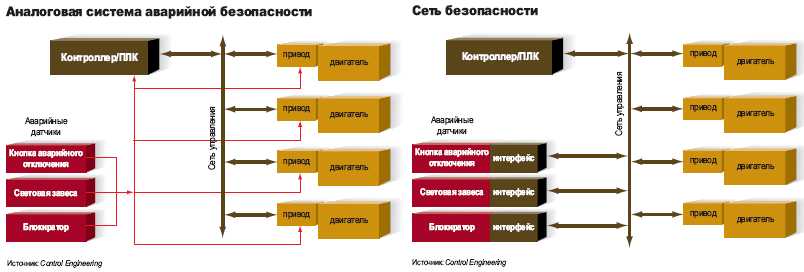
Рисунок 4 – Сравнение подходов в организации промышленных систем безопасности
Дистанционные выключатели применяются для управления бытовым освещением. Их особенностью является то что они коммутируют переменное напряжение 220 В с помощью симисторов, поэтому их нельзя применить на роботе Феникс-3. В качестве примера можно привести дистанционный сенсорный выключатель-светорегулятор «Сапфир» [7], представленный на рисунке 5.

Рисунок 5 – Дистанционный сенсорный выключатель-светорегулятор «Сапфир»
Он имеет следующие технические характеристики:
| Таблица 1 – Технические характеристики выключателя-светорегулятора «Сапфир» | |
| Напряжение сети | 220 В, 50 Гц |
| Мощность нагрузки | 40–400 Вт |
| Тип нагрузки | Лампы накаливания и галогенные лампы 220 В |
| Диапазон рабочих температур | 0…+40 °C |
Существуют устройства для дистанционного управления различными нагрузками [8]. Примером может служить MP911 (Приемник для пульта ДУ 433 МГц (MP910)), представленный на рисунке 6. Технические характеристики представлены в таблице 1.1.2. Он работает вместе с пультом ДУ MP910 (Брелок для систем ДУ 433 МГц (MP911, MP912)), представленным на рисунке 7.
Рисунок 6 – MP911 – приемник для пульта ДУ 433 МГц (MP910)
Технические характеристики MP911 представлены в таблице 2.
| Таблица 2 – Технические характеристики приемника MP911 | |
| Напряжение питания, В | 12 |
| Ток потребления, мА | 70 |
| Макс. мощность нагрузки, Вт | 1200 |
| Частота, МГц | 433,92 |
| Чувствительность, мкВ | 5 |
| Габаритные размеры, ДхШхВ, мм | 50х30х15 |

Рисунок 7 – MP910 – Брелок для систем ДУ 433 МГц (MP911, MP912)
Технические характеристики MP910 представлены в таблице 3.
| Таблица 3 – Технические характеристики передатчика MP910 | |
| Напряжение питания, В | 12 |
| Ток потребления, мА | 4 |
| Частота, МГц | 433,92 |
| Выходная мощность, мВт | 10 |
| Габаритные размеры, ДхШхВ, мм | 50х30х15 |
Другим подобным устройством является выключатель дистанционный одноканальный CHR-1 на радиочастоте [9], представленный на рисунке 8.

Рисунок 8 – CHR-1 – выключатель дистанционный одноканальный
CHR-1 имеет следующие параметры:
| Таблица 4 – Технические характеристики выключателя CHR-1 | |
| Количество каналов | 1 канал |
| Коммутируемое напряжение | 220В |
| Коммутируемый ток | 3А |
| Основа приемо-передающей части | Приёмник ZABR-01, дешифратор дистанционного управления PT2272M4 |
| Режим управления | Удержание (реле замкнуто, пока нажата кнопка) |
| Возможность использования дополнительных пультов | Дополнительные пульты программируются путём запаивания перемычек |
Также в качестве примера можно привести выключатель дистанционный 4-х канальный CHSL-DC4 на радиочастоте [9], представленный на рисунке 9.
Рисунок 9 – CHSL-DC4 – выключатель дистанционный 4-х канальный
CHR-1 имеет следующие параметры:
| Таблица 5 – Технические характеристики выключателя CHSL-DC4 | |
| Количество каналов | 4 канала |
| Коммутируемое напряжение | 220В |
| Коммутируемый ток | 7А |
| Основа приемо-передающей части | Приёмник ZABR-01, дешифратор дистанционного управления SC2272-T4 или SC2272-М4 |
| Режим управления | зависит от типа применяемой микросхемы: микросхема SC2272-T4 – режим фиксированный, микросхема SC2272-М4 – режим удержания |
| Возможность использования дополнительных пультов | Дополнительные пульты программируются путём запаивания перемычек |
Все перечисленные устройства осуществляют коммутацию с помощью реле, что позволяет использовать их для коммутации цепей постоянного тока. Однако они имеют существенный недостаток: отсутствие обратной связи между приемником и передатчиком и контроля качества связи.
Обратная связь от приемника к передатчику, реализуемая с помощью более развитого протокола обмена с подтверждением необходима для работы с автономными мобильными объектами, так как оператор не всегда может визуально наблюдать результат иммобилизации (например, если робот находится за углом). Контроль качества связи также является важной функцией, при его наличии оператор сможет контролировать расстояние до мобильного объекта и, в случае достижения критической величины, принять соответствующие меры. Эту функцию можно реализовать путем периодической посылки информации об уровне радиосигнала от приемника к пульту ДУ, находящемуся у оператора.
Что касается автономных мобильных роботов, то они еще недостаточно распространены и в основном являются исследовательскими проектами. Как правило, у них вообще нет иммобилизатора. Принципиально важным требованиям для такого класса устройств является беспроводность и надежность работы в зашумленной обстановке.
Кроме этого набор базовых требований, предъявляемых к системе иммобилизатора автономного мобильного объекта, включает в себя: компактность, экономичность, энергонезависимость, наличие обратной связи между пультом ДУ и приемно-исполнительным устройством, контроль качества связи.
Данная работа ставила своей конечной целью создание беспроводного иммобилизатора для робота Феникс-3 в целях обеспечения безопасности проведения экспериментов.
Выполненный анализ рынка показал, что готовых решений удовлетворяющих в полной степени этому набору требований нет, что и предопределило актуальность выполненной разработки.