
ВП1 позволяет
| Вид материала | Документы |
СодержаниеВП1 позволяет ВП2 включает все свойства ВП1 и позволяет |
- Поведение в конфликтах, 261.72kb.
- Доклад, вошедший в материалы, 29.38kb.
- Муниципальное общеобразовательное учреждение, 584.01kb.
- Славянский-на-кубани государственный педагогический институт, 269.02kb.
- Методика предназначена для работы с учащимися начальной школы. Возраст испытуемых 6-9, 49.75kb.
- Учебно-методический комплекс для специальностей 080504 Государственное и муниципальное, 821.84kb.
- Кол-во часов в неделю 4 часа, за год 144 часа, 9.62kb.
- Повышение эффективности биологической очистки сточных вод, 50.29kb.
- Врамках диалектической традиции сознание характеризуется важнейшим системным компонентом, 117.11kb.
- Работа со списками в языке Пролог Рекурсия в Прологе, 175.74kb.
7.Анализ и оптимизация системы средствами Labview.
Labview – это программная среда, использующая язык графического программирования G.
Структурная схема исследуемой линейной непрерывной системы автоматического управления представлена на рисунке 7.1.
Рисунок 7.1.- Структурная схема следящей системы
где,
Wi(p) – передаточные функции элементов;
R(p) – передаточная функция корректирующего устройства;
1(t) – входное воздействие в виде единичного скачка;
h(t) – переходная функция.
Передаточные функции звеньев
 ,
,а структуры регуляторов могут быть заданы в виде:
 ;
; ;
; ;
; ;
;При решении поставленной задачи используются два виртуальных прибора (ВП1 – виртуальный прибор 1, ВП2 – виртуальный прибор 2). Интерактивные графические лицевые панели виртуального прибора обеспечивают управление программой и представление данных.
ВП1 позволяет:
- задавать любые передаточные звенья вида
- задавать структуры корректирующих устройств в соответствии с заданием
- рассчитывать и отображать:
- переходную функцию h(t);
- ЛАЧХ И ЛФЧХ;
- корни (плоскость корней) числителя и знаменателя передаточной функции;
- «общую» передаточную функцию САУ
- производить оценку качества переходного процесса по величинам: времени регулирования, перерегулирования, максимального значения переходной функции;
- проводить анализ устойчивости системы и делать вывод о характере системы управления.
ВП2 включает все свойства ВП1 и позволяет:
- осуществить процесс оптимизации как для каждого параметра регулятора, так и в целом;
- рассчитывать и отображать удачные и текущие:
- переходные функции h(t);
- параметры корректирующего устройства;
значения функций качества переходного процесса и функции качества корней;
7.1. Анализ нескорректированной САУ
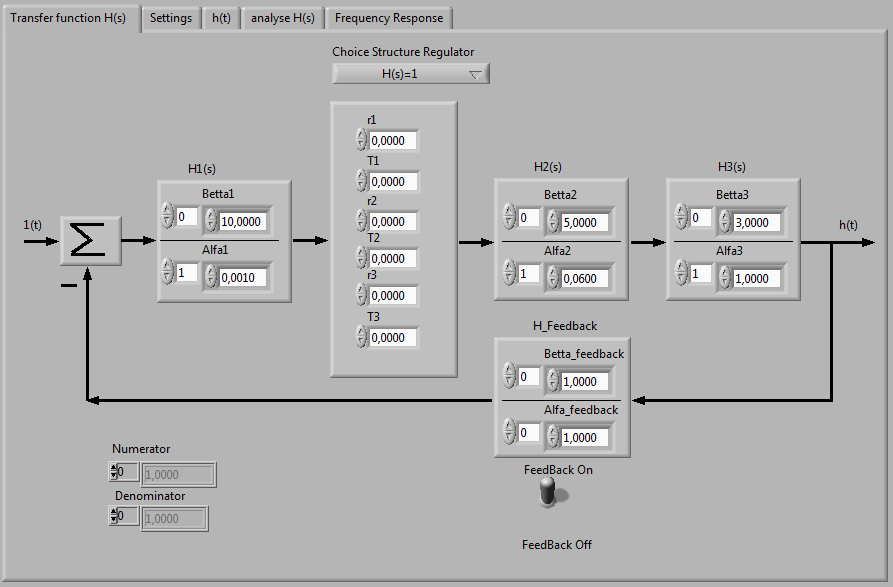
Рисунок 7.2.- Модель передаточной функции нескорректированной системы.
а) Анализ корней W(p).
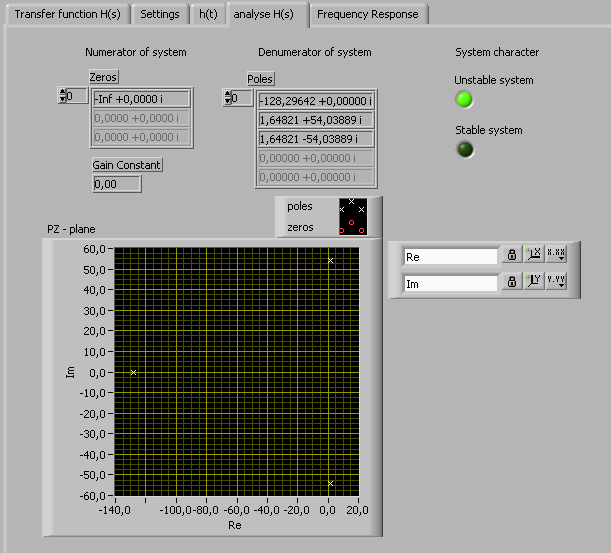
Рисунок 7.3.- Анализ корней W(p).
б)Анализ ЛАЧХ и ЛФЧХ
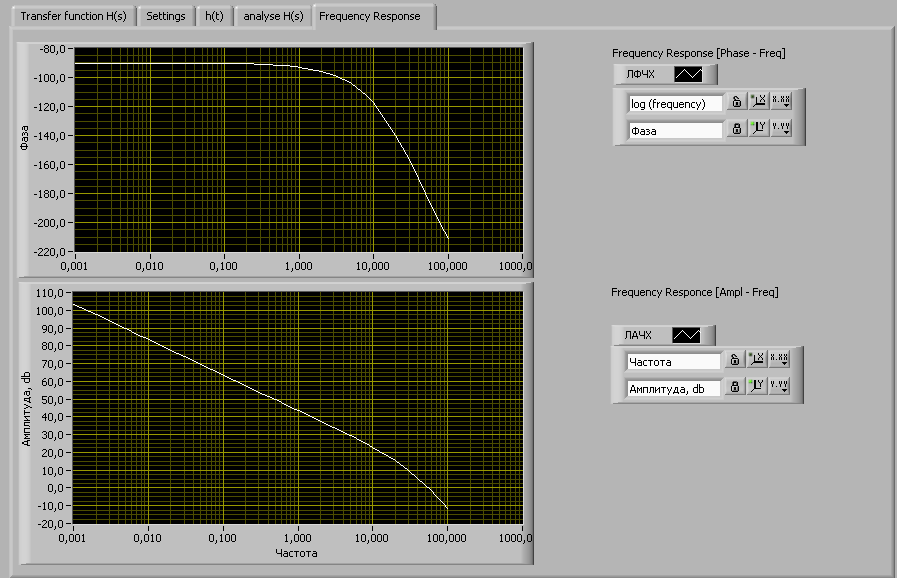
Рисунок 7.4.- ЛАЧХ и ЛФЧХ
Рисунок 7.3. показывает, что два корня знаменателя общей передаточной функции системы лежат в правой полуплоскости, следовательно, исходная САР неустойчива.
Вид графиков на рисунке 7.4 показывает, что фазовая характеристика j(w) пересекает линию
j(w) = – 180 о раньше, чем характеристика Lm(w) пересекает линию Lm(w) = 0 дБ. Следовательно, при замыкании САР единичной обратной связью она будет неустойчивой.
7.2. Оптимизация САУ
Для коррекции исходной САУ введем корректирующее устройство, состоящее из 3 звеньев
 ,
,  ,
,
 ,
,Возьмем начальные значения параметров tau1,T1, tau2,T2, tau3, T3 равными:
tau1=1,176 T1=11,1
tau2=0,0525 T2=0,009
tau3=0.01 T3=0,009
В результате оптимизации получим следующие оптимальные параметры корректирующего устройства:
tau1=1,153 T1=11,1
tau2=0,0352 T2=0,0394
tau3=0,01 T3=0.01
Значение функции качества Q function = 0,1092. Число итерации Iteration =28
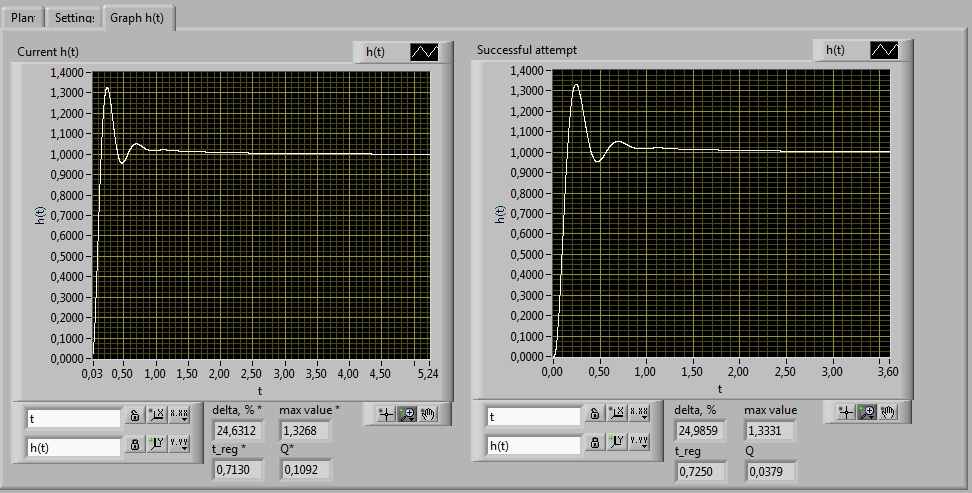
Рисунок 7.6.-Процесс оптимизации САУ
Проверим устойчивость системы с корректирующим устройством.
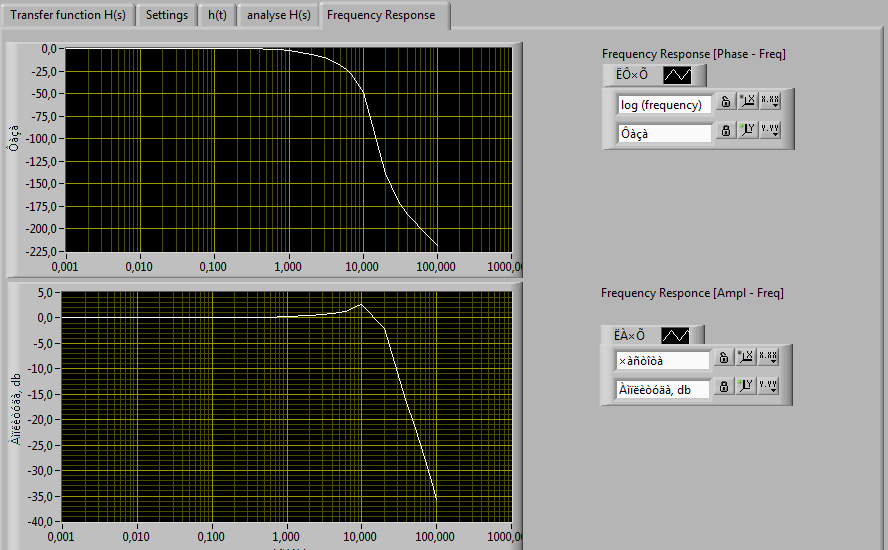
Рисунок 7.7.- ЛАЧХ и ЛФЧХ САУ с КУ
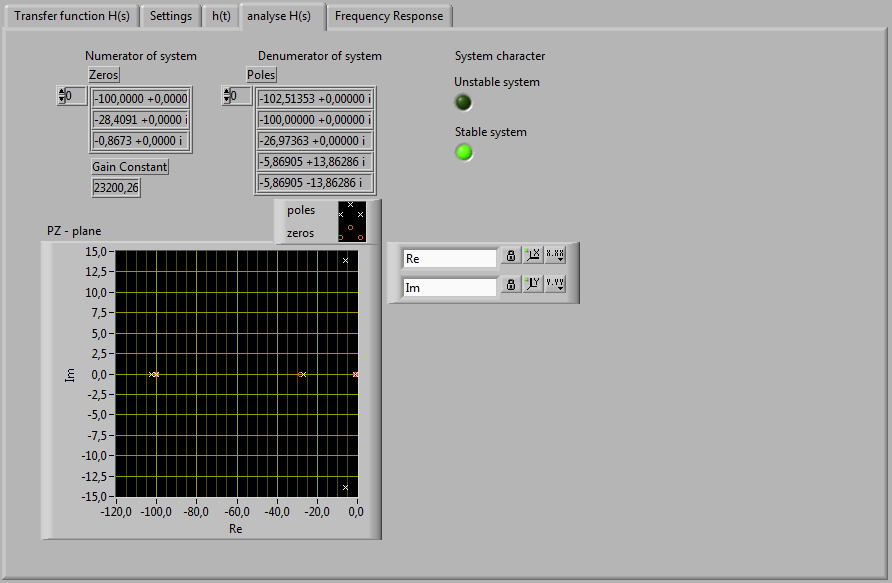
Рисунок 7.8.- Анализ корней САУ с КУ.
Рисунок 7.8. показывает, что все корни передаточной функции системы лежат в левой полуплоскости, из чего следует, что система устойчива.
Из рисунка 7.7 также видно, что САУ с корректирующим устройством устойчива.
Построим переходный процесс скорректированной САУ.
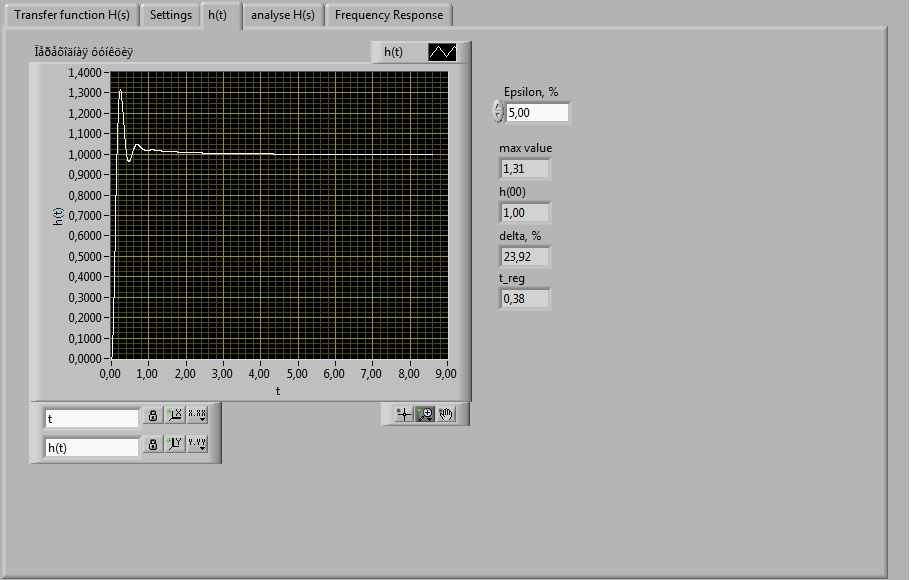
Рисунок 7.9.-Переходный процесс скорректированной САУ.