
Лекция по профессии: «Машинист подъемника грузопассажирского строительного»
| Вид материала | Лекция |
- Положение о Республиканском конкурсе профессионального мастерства, 15.43kb.
- Рабочая учебная программа предмета компрессорные и насосные установки по профессии, 161.94kb.
- Основы строительного производства, 20.92kb.
- Программа дополнительного образования при кафедре Технологии строительного производства, 173.05kb.
- «Агролицей №29», 173.94kb.
- Пояснительная записка к образовательной программе по профессиональной подготовке квалифицированных, 24.7kb.
- Выбор профессии Косых Елизавета, 319.18kb.
- Конспект открытого урока по развитию речи по теме: «Все профессии нужны все профессии, 43.72kb.
- План: Что такое профессия. Виды профессии Как выбирать профессию, 33.25kb.
- Тема: «Все профессии важны, все профессии нужны», 67.79kb.
Канатные механизмы. Для канатных механизмов подъема применяют барабанные лебедки и лебедки с канатоведущими шкивами.
Мачтовые подъемники. При использовании барабанной лебедки грузонесущий орган подвешивают не менее чем на двух канатах.
На барабане запасовано два каната, которые расположены в винтовых канавках с правой и левой нарезкой. Поэтому при вращении барабана эти канаты попарно сматываются или разматываются.
П
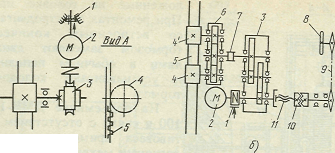
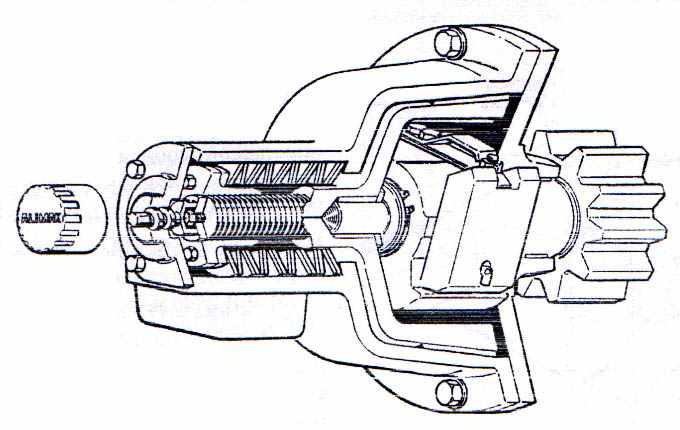
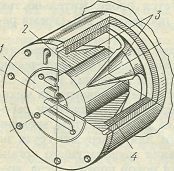
 ри применении лебедки с канатоведущими шкивами грузонесущий орган подвешивают не менее чем на трех канатах. Такой лебедкой оборудован подъемник МГП-1000. Она состоит из двухскоростного электродвигателя 1, соединенного с ведущим валом червячного редуктора 3 с помощью эластичной муфты. На ведомой полумуфте этой муфты установлен колодочный тормоз 2. К ведомому валу редуктора 3 через зубчатую муфту 6 присоединен вал, на котором свободно посажены монтажный барабан 7 и канатоведущий шкив 8.
ри применении лебедки с канатоведущими шкивами грузонесущий орган подвешивают не менее чем на трех канатах. Такой лебедкой оборудован подъемник МГП-1000. Она состоит из двухскоростного электродвигателя 1, соединенного с ведущим валом червячного редуктора 3 с помощью эластичной муфты. На ведомой полумуфте этой муфты установлен колодочный тормоз 2. К ведомому валу редуктора 3 через зубчатую муфту 6 присоединен вал, на котором свободно посажены монтажный барабан 7 и канатоведущий шкив 8.Монтажный барабан и канатоведущий шкив включаются с помощью водила, жестко сидящего на валу, и фиксирующих болтов. Монтажный барабан снабжен также собственным тормозом 5. Все детали лебедки смонтированы на общей раме. На поверхности канатоведущего шкива есть три кольцевых ручья, в которых располагаются три грузовых каната, огибающие шкив. За счет натяжения, создаваемого весом противовеса, канатов, кабины, канаты прижимаются к поверхностям ручьев. При этом возникает сила трения, которая предотвращает самопроизвольное проскальзывание канатов относительно шкива при его вращении и обеспечивает передачу канату тягового усилия, необходимого для перемещения кабины. Чтобы канат на канатоведущих шкивах не проскальзывал, масса противовеса должна быть в 1,5 раза больше массы кабины с полезной нагрузкой.
Бесканатные механизмы. Бесканатный (реечный) механизм подъема состоит из электродвигателя, редуктора, ведущей шестерни, входящей в зацепление с рейкой, установленной по всей длине мачты. Механизм размещен на грузонесущем органе. При вращении двигателя шестерня также вращается и при этом перемещается вдоль по рейке.
По конструкции рейки бывают зубчатые и цевочные. Бесканатные механизмы бывают с противовесом и без него. Назначение противовеса — уравновесить грузонесущий орган и грузовую каретку (при отсутствии груза), что позволяет уменьшить мощность приводного двигателя.
Механизм подъема подъемника ПГПМ-4272 (рис. а) расположен и закрыт капотом. Электродвигатель 2 со встроенным коническим электромагнитным тормозом 1 через эластичную муфту связан с ведомым валом червячного редуктора 3. На ведущем валу редуктора установлена шестерня 4, входящая в зацепление с зубчатой рейкой 5, прикрепленной к мачте на болтах по всей ее длине.
Кинематические схемы бесканатных (реечных) механизмов подъема подъемников:
а — ПГПМ-4272 и ДМВ-1003/100, б - ПР1-172А; 1. П — тормоза, 2 - электродвигатель, 3 — редуктор, 4, 41 — шестерня, 5 — рейка, 6 — раздаточная коробка, 7, 10 — муфты, 8 — штурвал, 9 — передача
Поскольку на подъемниках с бесканатными (реечными) механизмами подъема нет грузовых канатов, а есть только канаты, на которых подвешен противовес, конструкция и параметры этих механизмов (грузоподъемность, скорость, масса, габаритные размеры) не зависят от высоты подъема. Это позволяет сделать механизмы одинаковыми (унифицированными) для подъемников равной грузоподъемности или собирать их из одинаковых механизмов меньшей мощности (модулей) для подъемников разной грузоподъемности.
Мачты подъемников с реечными механизмами подъема монтируются легче, чем подъемников с канатными механизмами подъема, так как не требуется перепасовывать канаты и переставлять головные блоки после монтажа каждой секции. На время монтажа подъемников с бесканатными механизмами подъема, оборудованных также противовесами, головные блоки для канатов противовеса снимают и устанавливают после монтажа всей мачты.
Рейки бесканатных механизмов подъема более надежны в эксплуатации, чем стальные канаты. Потребляемая мощность реечных механизмов подъема, установленных на грузонесущих органах или грузовых каретках подъемников, не имеющих противовеса, больше, чем на подъемниках с канатными механизмами подъема, поскольку у первых механизм подъема поднимается вместе с кабиной.
Наличие противовеса на подъемниках с реечными и канатными механизмами подъема позволяет уменьшить потребляемую мощность, но несколько затрудняет монтаж.
Тема 1.4. Грузонесущие устройства
Требования к кабинам грузопассажирских подъемников.
1. Кабина должна иметь ограждение со всех сторон. Высота кабины в свету должна быть не менее 2 м.
2. Кабина должна иметь дверь, а при сплошном ограждении - и окна (окно). Высота дверей должна быть не менее 1,8 м, ширина дверей - не менее 0,6 м.
3. Световые проемы (окна) кабины должны быть выполнены из небьющегося (безосколочного) стекла. Высота расположения окна от пола кабины - не ниже 1000 мм.
4. Крыша кабины должна быть рассчитана на нагрузку от массы двух человек и монтажного инструмента, исходя из нагрузки 1000 Н на каждого человека и на инструмент, распределенной на площади по 0,3 х 0,3 м.
5. При наличии люка в потолочном перекрытии кабины размеры люка должны быть не менее 750 х 750 мм.
6. Люк должен закрываться крышкой, открываемой наружу и выдерживающей нагрузки по п. 4. В открытом положении крышка люка не должна выходить за габариты кабины в плане.
7. Люк должен быть оборудован замком и открываться только специальным ключом.
8. Пол кабины не должен быть скользким.
9. При оборудовании кабины трапом для прохода в здание или на переходную площадку, трап в нерабочем положении (при движении кабины) не должен выходить за габариты кабины.
10. Установка выдвижного трапа в рабочее положение (и обратно) должна осуществляться при управлении из кабины после ее остановки.
Трап должен быть надежно зафиксирован от произвольного перемещения до того, как будет открыта дверь кабины.
11. Трап должен быть рассчитан на нагрузки, возникающие в процессе погрузочно-разгрузочных работ.
12. Между движущимися и неподвижными элементами подъемника должны выдерживаться следующие расстояния безопасности:
а) между порогом кабины (трапа) и порогом пола посадочной площадки - не более 50мм;
Требования к грузонесущим устройствам грузовых подъемников.
1. Грузовые подъемники по требованию потребителя могут оснащаться сменными грузонесущими устройствами (грузовой платформой, монорельсом, укосиной и др.) для подачи строительных материалов, включая жидкие, сыпучие, длинномерные и ДР-
2. Допускается платформу оборудовать трапом, рассчитанным на нагрузки, возникающие в процессе погрузочно-разгрузочных работ.
3. В нерабочем положении (при перемещении платформы) трап должен быть жестко зафиксирован на платформе.
4. Грузовые подъемники, допускающие выход человека на грузовую платформу, должны быть рассчитаны на возникающие при этом нагрузки и быть оборудованы устройствами, обеспечивающими безопасность при нахождении людей на платформе. Возможность выхода людей на платформу должна быть записана в паспорте подъемника.
5. Подъемники с монорельсом, укосиной и другими устройствами для опускания груза на перекрытия через оконные проемы должны иметь возможность вертикального перемещения груза не менее чем на 1 м.
Тема 1.5. Мачты, противовес, ограждение
Мачта - вертикальная несущая конструкция грузового или грузопассажирского подъемника, служащая для перемещения вдоль одной из ее боковых граней грузонесущего устройства.
Направляющая - элемент металлоконструкции мачты, либо шахты или натянутый канат, который определяет направление перемещения грузонесущего устройства при его подъеме (опускании).
П
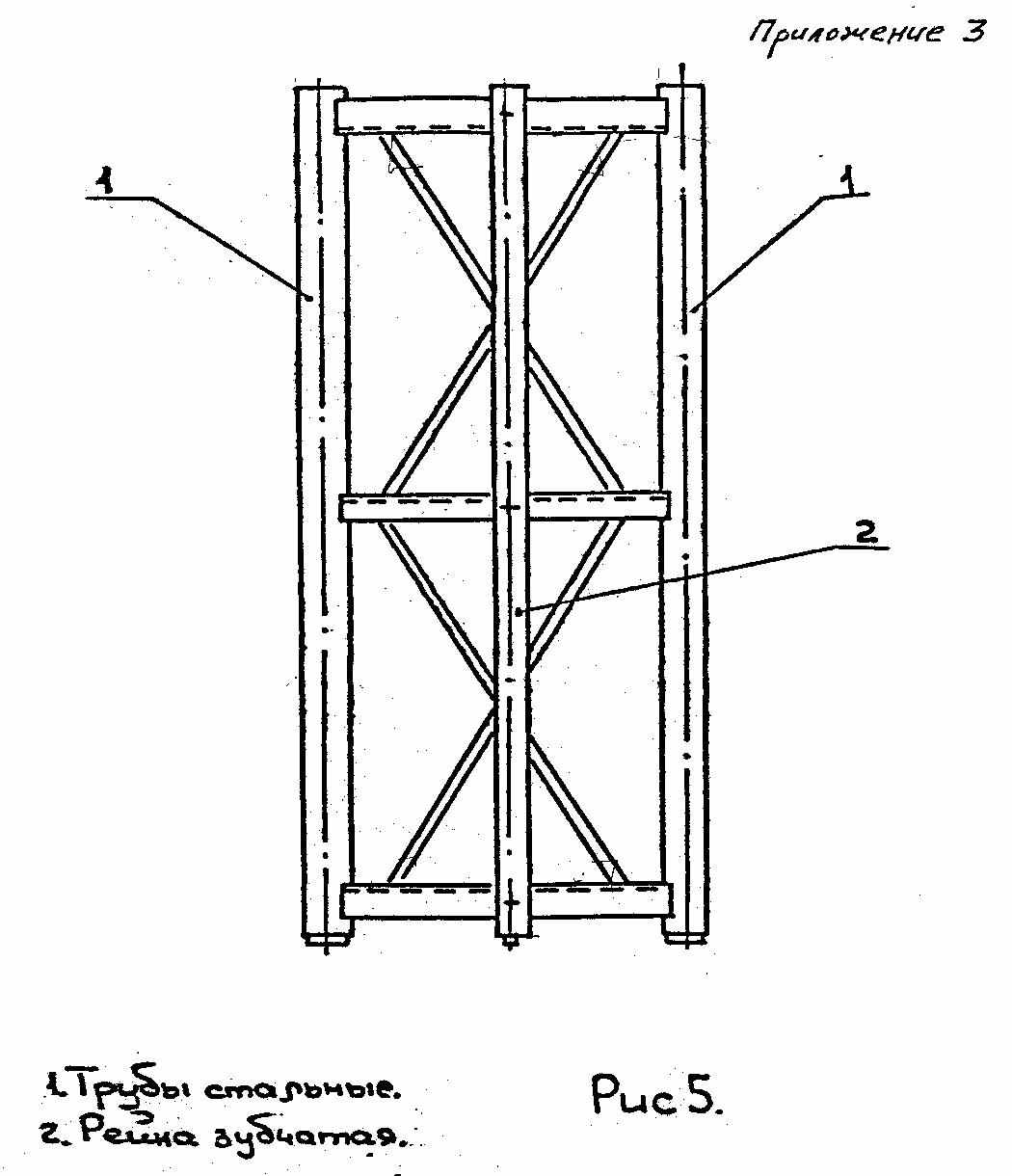 одъемник ПГПМ-4272. Секция мачты с зубчатой рейкой (рис. 5) содержит пространственную металлоконструкцию, высотой 1508 мм. Для поясов секции применены трубы (1), диаметром 76х4 мм, поперечное сечение секции квадратное 650х650 мм. На рамах секции, посредством болтового соединения, закреплена зубчатая рейка (2).
одъемник ПГПМ-4272. Секция мачты с зубчатой рейкой (рис. 5) содержит пространственную металлоконструкцию, высотой 1508 мм. Для поясов секции применены трубы (1), диаметром 76х4 мм, поперечное сечение секции квадратное 650х650 мм. На рамах секции, посредством болтового соединения, закреплена зубчатая рейка (2).Для сборки мачты заданной высоты, секции монтируются и соединяются между собой посредством четырех болтов (рис. 1, поз. 4).
Противовес, его назначение и устройство. Требования к нему.
Ограждение подъемника и его узлов: механизмов, электрооборудования, кабины.
Подъемник МГП-1000.
Подъемник «Скандо». Мачта состоит из секций длиной 1508 мм, представляющих собой решетчатую конструкцию, построенную из труб и раскосов. На каждой секции имеется одна или две прецизионно фрезерованные зубчатые рейки. Секции крепят вместе болтами и гайками.
Секции мачты имеются двух исполнений: с одной зубчатой рейкой для подъемника с одной клетью и с двумя зубчатыми рейками, со сваренной направляющей или без неё, для подъемника с двумя клетями.
Секции мачты для одной клети можно переоборудовать для клети с двумя мачтами, смонтировав еще одну зубчатую рейку.
Мачту подъемника крепят к зданию настенными опарами. Настенные опоры монтируют к изготовленным из угловой стали вертикальным рамам секций мачты и к закладным деталям в зданий.
Настенные опоры имеются разных типов и размеров с бесступенчато регулируемой длиной в определенных пределах. Наибольший наклон настенных опор может составлять 8 в вертикальной плоскости.
Концевые отводки на верху и внизу мачты воздействуют на концевые выключатели на клети, в результате чего клеть остановится автоматически в обоих крайних положениях на мачте.
Главный концевой выключатель на клети со своими отводками на мачте контролирует и отключает ток на всех фазах, если концевые выключатели по какой-либо причине вышли из строя.
Требования «Правил» к металлоконструкциям, направляющим
1. Мачты (шахты) подъемников должны предусматривать узлы крепления к строительному сооружению (кроме подъемников, выполненных в свободно стоящем исполнении) с помощью жестких регулируемых связей, рассчитанных на максимальные нагрузки.
2. Перемещение грузонесущего устройства грузопассажирского и грузового подъемника (кабины, платформы, ковша, монорельса и др.) и противовеса должно осуществляться по жестким направляющим.
3. Высота направляющих должна определяться из условия, чтобы при возможных перемещениях грузонесущего устройства (противовеса) за пределы крайних положений опорные ролики (башмаки) не сходили бы с направляющих.
4. Секции мачты подъемников с реечным приводом должны быть взаимозаменяемыми для обеспечения постоянства шага зубчатой рейки и плавного перемещения грузонесущего органа.
5. Направляющие и их стыки должны быть предохранены от взаимного смещения.
6. Металлоконструкции, направляющие и другие металлические детали подъемника должны быть предохранены от коррозии. В коробчатых и трубчатых металлоконструкциях, работающих на открытом воздухе, должны быть предусмотрены меры против скопления в них влаги.
Противовес - грузы, служащие для уравновешивания кабины или грузовой платформы.
1. Противовес подъемника должен быть рассчитан на нагрузки, возникающие:
- при рабочем режиме движения;
- при посадке противовеса на буфера;
- при посадке кабины на ловители и буфера.
2. Противовес должен быть оборудован роликами, которые не должны выходить из направляющих как при работе, так и при испытаниях.
3. Масса противовеса для подъемников с канатоведущими шкивами должна приниматься равной 100% от массы кабины плюс 50% от грузоподъемности.
4. Масса противовеса для подъемников с реечным механизмом подъема и с барабанными лебедками не должна превышать суммарную массу порожнего грузонесущего устройства и подвесного кабеля длиной равной максимальной высоте подъема.
5. Противовес, состоящий из отдельных грузов, должен быть выполнен таким образом, чтобы смещение каждого груза относительно других было бы невозможно.
6. На элементах противовеса должна указываться их фактическая масса.
7. Допускается применение только тарированных грузов противовеса.
Тема 1.6. Устройства безопасности
Устройство безопасности - техническое устройство электрического, механического или иного (неэлектронного) типа, устанавливаемое на подъемнике для отключения механизмов в аварийных ситуациях или предупреждения этих ситуаций.
Выключатель безопасности - устройство безопасности электрического типа.
Аварийный останов - устройство безопасности механического типа, предназначенное для аварийной остановки кабины, платформы реечного подъемника при повышении скорости опускания сверх допустимой.
Рабочий выключатель - электрический аппарат, служащий для отключения механизма в определенных рабочих положениях, установленных эксплуатационной документацией.
1. Выключатели безопасности
1.1. Грузопассажирские подъемники должны быть оборудованы следующими выключателями безопасности:
а) концевыми выключателями, ограничивающими крайние верхнее и нижнее положения кабины;
б) контроля закрытого положения дверей нижнего ограждения кабины;
в) контроля закрытого положения входных и выходных дверей кабины;
г) контроля положения трапа (при его наличии);
д) контроля срабатывания ловителей (на подъемниках с канатным приводом);
е) контроля слабины или обрыва подъемных канатов;
ж) контроля срабатывания ограничителя скорости (на подъемниках с реечным приводом);
з) контроля положения натяжного устройства каната ограничителя скорости;
и) кнопкой «Стоп».
1.2. Ограничитель скорости должен срабатывать при скорости движения кабины, платформы, превышающей номинальную не менее чем на 15% и не более чем на 40%.
1.3. Совмещение в одном выключателе функций выключателя безопасности и рабочего выключателя не допускается.
1.4. Выключатели безопасности должны иметь конструкцию, при которой изменение их коммутационного положения происходит только вследствие непосредственного механического воздействия (или снятия этого воздействия) на соответствующий элемент выключателя.
1.5. Не допускается шунтирование контактов выключателей безопасности установкой токопроводящих перемычек.
1.6. Конструкция концевого выключателя крайних положений кабины, выключателей ловителей, слабины подъемных канатов и каната ограничителя скорости (с учетом их установки) должна быть несамовозвратной.
Допускается указанные выключатели и/или их установку выполнять самовозвратными при соблюдении следующих требований:
а) элемент, непосредственно вызвавший срабатывание выключателя, должен зафиксировать его в этом положении;
б) последующее нормальное функционирование подъемника должно быть возможно только после устранения причины, вызвавшей срабатывание выключателя, и после подачи новой команды.
1.7. Срабатывание концевого выключателя должно происходить при переходе грузонесущим устройством:
а) нижнего, установленного эксплуатационной документацией уровня, исключающего соприкосновение кабины с буферами при ее остановке;
б) верхнего, установленного эксплуатационной документацией уровня, но не более чем на 200 мм (для подъемников без противовеса);
в) верхнего, установленного эксплутационной документацией уровня, исключающего соприкосновение противовеса с буферами при его остановке.
1.8. Выключатели безопасности должны быть включены в цепь управления. Срабатывание концевых выключателей должно приводить к размыканию цепи управления и/или силовой цепи электродвигателя.
1.9. При установке концевых выключателей в цепь управления грузопассажирского подъемника с барабанной лебедкой или реечным приводом необходимо предусматривать не менее двух выключателей, действующих в каждом из направлений движения кабины. Концевые выключатели должны действовать на отдельные электромагнитные аппараты, обеспечивающие двойной разрыв силовой цепи электродвигателя лебедки.
2. Указатели
2.1. Свободностоящие и передвижные подъемники с высотой мачты более 15 м должны быть снабжены анемометром, автоматически выключающим звуковой сигнал при достижении скорости ветра, указанной в паспорте подъемника.
2.2. Грузовые и грузопассажирские подъемники должны оборудоваться счетчиками моточасов.
3. Ловители, аварийные остановы.
Ловитель - устройство безопасности механического типа, предназначенное для аварийной остановки и удержания грузонесущего устройства подъемника в случае превышения скорости подъема, указанной в эксплуатационной документации, обрыва или ослабления подъемного каната.
3.1. Ловители (аварийные остановы) должны останавливать и удерживать на направляющих движущуюся вниз кабину, платформу с грузом при превышении скорости движения, появлении слабины, либо обрыве канатов или цепей.
3.2. Приведение в действие ловителей и аварийных остановов от электрических, гидравлических или пневматических устройств не допускается.
3.3. После снятия кабины с ловителей они должны автоматически принимать исходное положение и быть готовыми к работе.
3.4. Для удержания движущейся вниз кабины со скоростью свыше допустимой в подъемниках с реечным приводом подъема должен применяться аварийный останов.
Аварийный останов должен приводиться в действие от ограничителя скорости и удерживать на зубчатой рейке движущуюся вниз кабину при включении останова.
3.5. Аварийный останов должен иметь устройство для возвращения в исходное положение после остановки кабины аварийным остановом.
Устройство для возврата аварийного останова в исходное положение должно приводиться в действие вручную с помощью инструмента, находящегося в кабине.
3.6. Ловители и аварийные остановы снабжаются табличкой с указанием наименования организации-изготовителя и ее товарного знака, заводского номера, года изготовления, типа (резкого торможения, плавного торможения, комбинированные), номинальной скорости движения грузонесущего устройства и расчетной улавливаемой массы.
3.7. Кабина грузопассажирского мачтового подъемника должна быть, снабжена страховочными башмаками, размещенными ниже ходовых роликов на случай поломки роликов, их осей или выхода роликов за пределы направляющих.
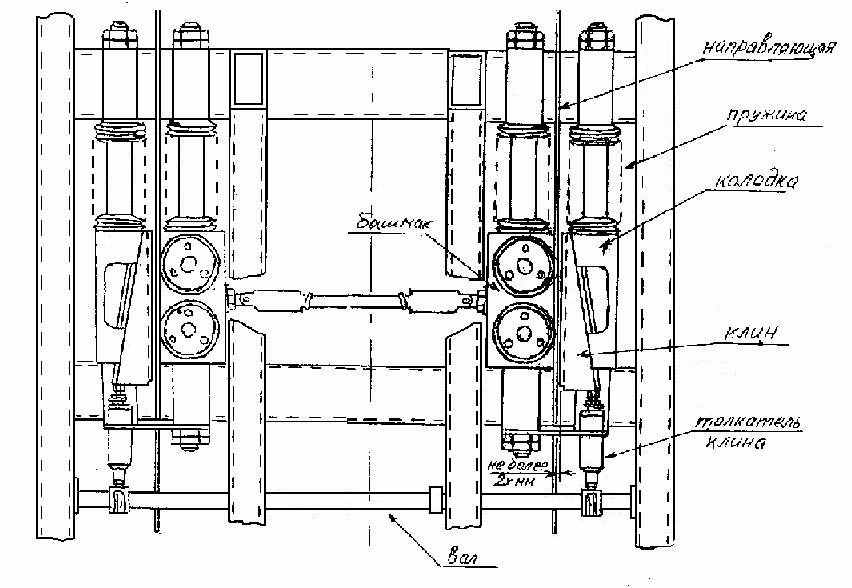
4 Буфера
Буфер – устройство безопасности, служащее для смягчения удара кабины грузопассажирского подъемника в случае аварии.
4.1. В нижней части зоны движения кабины и грузовой платформы для амортизации и остановки движения кабины (противовеса) при переходе нижнего рабочего положения должны быть предусмотрены буфера.
4.2. Пружины буфера грузопассажирского подъемника должны снабжаться паспортом с указанием наименования организации-изготовителя, года изготовления и характеристики пружины.
Системы управления
1. Подъемники могут иметь следующие виды управления:
а) внутреннее, при котором пульт управления устанавливается на грузонесущем устройстве;
б) наружное, при котором управление грузонесущим устройством осуществляется с выносного пульта, расположенного вне подъемника.
2. Грузопассажирские и фасадные подъемники должны иметь в качестве рабочего - внутреннее управление.
3. В грузопассажирском подъемнике пульт управления должен находиться в кабине вблизи двери, обращенной в сторону здания.
4. Длина кабеля выносного пульта должна допускать нахождение пульта при испытаниях за пределами опасной зоны принимаемой согласно требованиям строительных норм и правил.
5. Выносной пульт, используемый в качестве рабочего, должен быть снабжен блокировочным устройством, исключающим управление подъемником посторонним лицом.
6. У подъемников с реечным приводом и фасадных подъемников на выносном пульте, для проверки аварийных остановов в режиме «Испытания», должна быть предусмотрена кнопка растормаживания привода (без включения его электродвигателя).
7. Аппараты управления (кнопочные, рычажные) должны выполняться с самовозвратом их в нулевое положение, при котором происходит отключение электродвигателя.
8. На пульте управления или рядом с ним должна быть предусмотрена кнопка «Стоп», отключающая цепь управления подъемника.
9. Система управления подъемником должна удовлетворять следующим требованиям:
а) эксплуатация подъемника во всех режимах, предусмотренных эксплуатационной документацией («Работа», «Монтаж», «Испытания», «Ревизия») должна происходить только при нажатой кнопке или рычаге аппарата управления;
б) в схеме управления должен быть предусмотрен переключатель выбора режимов, обеспечивающий управление подъемником только в одном из этих режимов;
в) остановка грузонесущего органа в крайних положениях должна происходить автоматически.
10. В режиме «Испытание» управление подъемником должно производиться с выносного пульта.
11. Грузовые подъемники могут иметь групповое управление несколькими подъемниками с пульта, установленного в отдельно стоящем помещении. Помещение должно обеспечивать обзор зоны работы подъемников на всю высоту сооружения и должно быть оборудовано освещением, отоплением и двусторонней связью со всеми загрузочными площадками при их удалении от помещения более 20 м.
12. При групповом управлении разрешается одновременное управление только одним подъемником.
Тема 1.7. Электрооборудование подъемников
Основные сведения из электротехники
Электрическим током называют упорядоченное движение электрических зарядов q в проводящей среде под воздействием электрического поля.
Если скорость движения электрических зарядов во времени неизменна, то ток называют постоянным. Ток, мгновенные значения которого изменяются во времени, называют переменным, электрический ток, мгновенные значения которого повторяются через равные промежутки времени, называется периодическим переменным. Ток, изменяющийся по синусоидальному закону, называют синусоидальным. Ток выражают в амперах (А) и обозначают I, i.
Электрический ток в цепи возникает в том случае, если на ее зажимах (полюсах) создана разность потенциалов (существует электрическое поле вдоль участка цепи). Разность потенциалов между двумя точками цепи называют напряжением или падением напряжения. Напряжение обозначают U, u и выражают в вольтах (В).
Электрическое напряжение численно равно работе А, совершаемой источником электрической энергии при перемещении заряда q в один кулон из одной точки в другую.
Способность проводника оказывать препятствие, проходящему по нему электрическому току называют сопротивлением. Сопротивление обозначают R, r. и выражают в омах (Ом).
Закон Ома для полной цепи: I = E/(R+r)
Закон Ома для участка цепи: I = U/R
Последовательным соединением потребителей тока называют соединение, при котором конец первого соединяется с началом второго, конец второго – с началом третьего и т.д.
Параллельным соединением потребителей тока называют такое соединение, когда начала всех токоприемников соединены в одну точку, а концы в другую точку.
Тепловое действие электрического тока.
Все проводники при прохождении по ним электрического тока нагреваются и отдают тепло окружающей среде. Температура нагрева проводника зависит от величины тока, сечения и материала проводника, условий его охлаждения.
Закон Джоуля – Ленца: Q = I2*R*t (джоуль)
Мощность постоянного тока
Мощность – работа, совершаемая в единицу времени t, развиваемая на этом участке.
P = A/t = U*q/t = U*I
Единица мощности – ватт (Вт).
Понятие о магнитном поле.
Вокруг проводника, по которому течет ток образуется магнитное поле.
Магнитные индукционные линии вокруг проводника с током обладают следующими свойствами:
- магнитные индукционные линии прямолинейного проводника имеют форму концентрических окружностей;
- чем ближе к проводнику, тем гуще располагаются магнитные индукционные линии;
- магнитная индукция (интенсивность поля) зависит от величины тока в проводнике;
- направление магнитных индукционных линий зависит от направления тока в проводнике (правило буравчика).
Переменный ток.
Переменный ток имеет следующие характеристики: амплитуду, частоту, период.
Промежуток времени, по истечении которого изменение переменной величины (ЭДС, напряжения, тока) повторяются, называется периодом. Период измеряется в секундах и обозначается Т.
Число периодов в секунду называется частотой переменного тока. Частота обозначается f и измеряется в герцах (Гц).
Между периодом и частотой существует следующая зависимость: T = 1/f; f = 1/T
Мощность переменного тока.
Активная, то есть полезная мощность однофазного переменного тока определяется по формуле: P = U*I*cos
Коэффициентом мощности называется отношение активной мощности к полной:
cos = P / S
Коэффициент мощности практически является косинусом угла сдвига фаз между током и напряжением.
Чем меньше cos имеет потребитель, тем меньше будет коэффициент полезного действия (кпд) машины, тем меньшую активную мощность будет отдавать генератор.
Причины низкого коэффициента мощности:
1. Недогрузка электродвигателей переменного тока;
2. Неправильный выбор типа электродвигателя;
3. Повышенный зазор между ротором и статором;
4. Работа электродвигателей на холостом ходу.
Трехфазный переменный ток.
Трехфазной системой переменного тока называют систему, состоящую из трех электрических цепей переменного тока одинаковой частоты, которые сдвинуты по фазе на 1/3 периода (120) относительно друг друга.
Соединение обмоток электрической машины звездой
Соединение звездой – концы обмоток соединены вместе, а начала обмоток подключаются к линейным проводам.
Точка, в которой соединяются концы обмоток, называется нулевой или нейтральной. Провод, подключенный к ней, также называется нейтральным или нулевым.
Разность потенциалов между линейным и нулевым проводом называется фазным напряжением (Uф).
Разность потенциалов между двумя линейными проводами называется линейным напряжением (Uл).
Зависимость между линейным и фазным напряжением: Uл = 3 Uф
При соединении звездой линейный ток равен фазному. Iл = Iф
Соединение обмоток треугольником.
Соединение треугольником называется соединение, когда конец первой обмотки соединяется с началом второй обмотки, конец второй обмотки с началом третьей, конец третьей с началом первой обмотки.
При соединении треугольником: Uл = Uф; Iл = 3 Iф
Трансформатором называется электромагнитный аппарат, предназначенный для преобразования переменного тока одного напряжения в переменный ток другого напряжения той же самой частоты. Принцип работы трансформатора основан на явлении взаимоиндукции.
Отношение числа витков первичной обмотки к числу витков вторичной обмотки или отношение напряжения первичной обмотки к напряжению вторичной обмотки называется коэффициентом трансформации.
Выпрямители служат для преобразования переменного тока в постоянный.
Электродвигатели и аппараты управления
Общие сведения об электрооборудовании и электродвигателях
Общие сведения. Электрооборудование строительных подъемников по назначению подразделяется на основное — оборудование электропривода и вспомогательное — оборудование рабочего и ремонтного освещения, сигнализации и отопления.
К основному электрооборудованию относятся: электрические двигатели, магнитные пускатели, контакторы, реле управления, аппараты регулирования частоты вращения электродвигателей; аппараты управления тормозами; аппараты электрической и механической защиты; полупроводниковые выпрямители — преобразователи переменного тока в постоянный для питания обмотки возбуждения вихревого тормозного генератора или других целей; понижающие трансформаторы, используемые для питания цепей управления; аппараты и приборы, используемые для включения цепей управления.
К вспомогательному электрооборудованию относятся осветительные приборы, приборы обогрева, сигнализации, связи и адресования.
Подъемники эксплуатируются на строительных площадках, поэтому они подвергаются воздействию атмосферных осадков, прямых солнечных лучей, больших перепадов температуры и повышенной запыленности воздуха. Электрооборудование, используемое на подъемниках, должно иметь влаго- и пылезащищенное исполнение, а также соответствовать климатическим условиям.
Электродвигатели. Типы и устройство. Механизмы подъемников приводятся в действие асинхронными электродвигателями трехфазного переменного тока. Применяют двигатели следующих разновидностей: с фазным и с короткозамкнутым ротором. Двигатели с короткозамкнутым ротором бывают одно- и многоскоростные. Односкоростные двигатели подразделяются на самотормозящие — со встроенным тормозом и без встроенного тормоза. На подъемниках в большинстве случаев применяются односкоростные двигатели с короткозамкнутым ротором несамотормозящие, т. е. без встроенного тормоза.
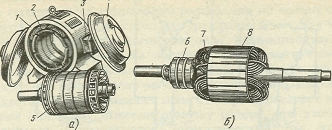
Рис. 58. Асинхронный электродвигатель с короткозамкнутым ротором (а) и фазный ротор (б).
Асинхронный электродвигатель (рис. 58 а) состоит из двух основных частей: неподвижной — статора 2 и вращающейся — ротора 5.
Статор имеет чугунную или алюминиевую станину 1 с запрессованной в нее активной частью, которая представляет собой пакет, набранный из пластинок тонкой листовой электротехнической стали. Каждая пластинка изолирована от соседней слоем лака. На внутренней цилиндрической поверхности пакета сделаны продольные пазы, в которых расположена обмотка статора.
Обмотка состоит из трех катушек (или групп катушек) с медным изолированным проводом, сдвинутых по окружности статора на равный угол относительно друг друга. Выводы от начала и конца каждой из трех групп катушек статора соединяются между собой в коробке 3 выводов, расположенной на внешней стороне станины двигателя. Обмотка статора этих двигателей чаще рассчитана на работу при напряжении в сети 220 и 380 В. При напряжении 220 В обмотка соединяется треугольником (Δ) (рис. 59, а), 380 В — звездой (Υ) (рис. 59, б). Для удобства соединения все шесть выводов от обмотки промаркированы: начала катушек обозначены С1, С2 С3, концы — С4, Cs, Сб.
Станина с обеих сторон закрывается крышками 4 (см. рис. 59,а), которые крепятся к ней болтами или стяжными шпильками. В крышках находятся подшипники, в которых вращается вал ротора.
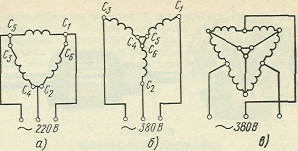
Рис. 59. Схемы соединения обмоток статора асинхронных электродвигателей:
а — треугольником, б — звездой, в— двойной звездой
Ротор 5, так же как и статор, собран из изолированных листов электротехнической стали. На наружной части ротора есть пазы, в которых укладывается обмотка.
По типу обмотки ротора электродвигатели разделяются на двигатели с короткозамкнутым и с фазным ротором. В короткозамкнутом роторе обмотка состоит из стержней, заложенных в пазы и соединенных с торцовых сторон токопроводящими кольцами. Такая обмотка называется беличьим колесом. Фазный ротор (рис. 58, б) отличается тем, что в пазах пакета 8 уложена обмотка 7 из изолированного привода. Как и обмотка статора, она состоит из трех катушек или трех групп катушек. Начала катушек соединены звездой на роторе, а концы подведены к трем контактным кольцам 6, изолированным друг от друга и от вала ротора. На кольца наложены угольные (графитовые) щетки, находящиеся в щеткодержателях, которые укреплены на одной из крышек станины электродвигателя. Когда щетки прижимаются к контактным кольцам, происходит скользящий токосъем, т. е. вращающаяся обмотка ротора может быть электрически соединена с неподвижными резисторами, находящимися вне двигателя. Дополнительное сопротивление резисторов, включаемое в цепь ротора, уменьшает пусковой ток двигателя, что снижает его пусковой момент и обеспечивает плавный пуск.
Работа электродвигателя основана на взаимодействии вращающегося магнитного поля обмотки статора и токов, индуцируемых в обмотке ротора. Если взять, например, стальное кольцо, намотать на него три проволочные обмотки (спирали) на одинаковом расстоянии по кольцу одна от другой и пропустить через них трехфазный ток, то у каждой обмотки образуется магнитное поле. Взаимодействуя между собой, эти три поля образуют общее магнитное поле; оно по величине останется неизменным и будет вращаться вокруг оси кольца, поэтому оно и называется вращающимся. В двигателе вращающееся поле статора пересекает магнитными силовыми линиями обмотку ротора, при этом в ней возникает (индуцируется) электрический ток, который взаимодействует с магнитным полем статора. Сила взаимодействия тока в обмотке ротора с вращающимся магнитным полем статора создает момент на оси ротора, под действием которого ротор вращается вслед за полем статора, преодолевая при этом приложенный к валу двигателя момент внешней нагрузки.
Частота вращения магнитного поля статора зависит от частоты тока и числа пар полюсов. Частота вращения ротора асинхронного двигателя всегда немного меньше, чем частота вращения магнитного поля статора. Поэтому этот тип двигателя и называют асинхронным (не совпадающим по времени). Во время разгона двигателя по мере приближения частоты вращения ротора к частоте вращения магнитного поля статора уменьшается относительная скорость пересечения обмотки ротора вращающимся магнитным полем статора, соответственно уменьшается и ток в роторе, а также вращающий момент. Когда момент сопротивления становится равным вращающему моменту двигателя, наступает состояние равновесия, при котором частота вращения ротора не изменяется.
Если приложить к валу двигателя вращающий момент нагрузки, направленный в ту же сторону, что и момент двигателя, то частота вращения вала двигателя возрастет, достигнет частоты вращения магнитного поля и несколько превзойдет ее. С этого момента двигатель начнет работать в режиме сверх синхронного торможения, называемом также генераторным, так как двигатель, работая в этом режиме, отдает энергию в сеть. Такой переход от двигательного режима к генераторному происходит у двигателей привода грузоподъемного механизма подъемников. Подъем груза происходит в двигательном режиме, а опускание его — в генераторном.
Чтобы изменить направление вращения асинхронного двигателя, достаточно поменять местами любые две фазы, питающие обмотку статора. При этом изменится направление тока в обмотках двигателя, следовательно, направление вращения магнитного поля статора и ротора.
Частота вращения магнитного поля статора п1 (об/мин) прямо пропорциональна частоте f переменного тока и обратно пропорциональна числу р пар полюсов в обмотке статора
n1 = (f * 60) /р.
Три группы катушек статора, сдвинутые по окружности статора на равный угол друг относительно друга, образуют одну пару полюсов, шесть групп образуют две пары полюсов, девять — три пары и т. д. Таким образом, изменяя число групп катушек в статоре двигателя, можно менять частоту вращения его магнитного поля, а следовательно, и вала двигателя. В многоскоростных двигателях, имеющих шесть групп катушек и более, изменяя порядок соединения их между собой и подключения к проводам внешней сети, изменяют частоту вращения ротора. Например, в двухскоростном двигателе, имеющем шесть групп катушек статора, для медленного вращения ротора их соединяют попарно последовательно треугольником, а для быстрого вращения — двойной звездой (см. рис. 59, в). Двигатели имеют от двух до четырех скоростей вращения вала. Сейчас выпускают асинхронные двигатели, рассчитанные на работу только при одном напряжении (127, 220 или 380 В); напряжение указано на табличке, закрепленной на внешней стороне станины двигателя.
На подъемниках Зремб-Гнезно, ДМВ-1003/100 применяют самотормозящий асинхронный электродвигатель со встроенными тормозами (рис. 60). Ротор этого двигателя имеет не цилиндрическую, а конусную форму, соответствующую форме расточки статора 3. Когда двигатель выключен, ротор силой пружины 6 выталкивается по направлению его оси из расточки статора, образуя увеличенный зазор. При этом тормозящий конус 5, жестко соединенный с валом ротора, прижимается к конической поверхности, находящейся внутри крышки 4 электродвигателя. Поэтому выключенный двигатель находится в заторможенном состоянии. Сила торможения регулируется предварительным затягиванием пружины 5 с помощью гаек 7.
П
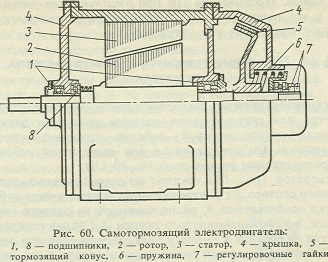 ри включении электродвигателя ротор втягивается в расточку статора до упора утолщения вала в подшипник 8. Зазор между ротором и статором при этом сокращается до нормальной величины, пружина 6 сжимается, тормозной конус отходит от конической поверхности крышки электродвигателя и торможение прекращается — электродвигатель работает.
ри включении электродвигателя ротор втягивается в расточку статора до упора утолщения вала в подшипник 8. Зазор между ротором и статором при этом сокращается до нормальной величины, пружина 6 сжимается, тормозной конус отходит от конической поверхности крышки электродвигателя и торможение прекращается — электродвигатель работает.Режимы работы двигателей подразделяются на кратковременные и повторно-кратковременные.
Кратковременным называется такой режим, при котором электродвигатель включается на короткое время (10... 20 мин), и при этом не успевает нагреться до установившейся температуры. Затем наступает длительный перерыв в работе до полного остывания двигателя.
Повторно-кратковременный режим представляет собой длительно повторяющиеся циклы. В каждом цикле последовательно чередуются включение — работа, выключение — пауза. Этот режим характеризуется продолжительностью включения (ПВ), выражаемой в процентах: ПВ-(время работы/время цикла)- 100 %.
Время цикла при этом режиме не должно превышать 10 мин. Таким образом, если двигатель работает непрерывно 10 мин, то ПВ — 100 %. Стандартные значения ПВ 15, 25, 40 и 60 %. Например, время цикла электродвигателя механизма подъема подъемника складывается из времени работы двигателя при подъеме груза на заданный этаж, времени перерыва в работе, необходимого для разгрузки груза на заданном этаже, времени опускания грузонесущего органа в исходное положение для взятия новой порции груза, времени загрузки грузонесущего органа подъемника и подготовительно-заключительного времени, состоящего из сравнительно коротких перерывов между перечисленными операциями. Превышение ПВ при эксплуатации двигателя ведет к его перегреву, что может нарушить изоляцию обмоточной проволоки его катушек.
Тормозные генераторы, электромагниты, толкатели
В
 ихревой генератор. Вихревой тормозной генератор применяется для регулирования частоты вращения электродвигателя грузоподъемной лебедки грузопассажирских подъемников. Он предназначен для совместной работы с электродвигателем мощностью 16...30 кВт.
ихревой генератор. Вихревой тормозной генератор применяется для регулирования частоты вращения электродвигателя грузоподъемной лебедки грузопассажирских подъемников. Он предназначен для совместной работы с электродвигателем мощностью 16...30 кВт.Рис. 61. Вихревой генератор: / - крышка, 2 - ротор,
3 - статор, 4 – обмотка возбуждения
Генератор (рис. 61) состоит из трех основных частей: стального статора 3 с внутренними полюсами в виде зубцов, обмотки возбуждения 4, расположенной на статоре между зубцами, и короткозамкнутого ротора 2. Статор генератора крепится на фланце к корпусу электродвигателя или редуктора. Короткозамкнутый ротор насаживается на вал двигателя или на первичный вал редуктора. Ротор с торца закрыт крышкой 1 с жалюзи для вентиляции.
Обмотка возбуждения питается постоянным током. Когда в обмотке проходит ток, в воздушном зазоре между полюсами статора образуется неподвижное многополюсное магнитное поле. При вращении ротора стержни его короткозамкнутой обмотки пересекают неподвижное магнитное поле, вследствие чего в них возникают электродвижущая сила и вихревые токи, замыкающиеся через торцовые кольца ротора. Взаимодействие токов в стержнях ротора с неподвижным магнитным полем статора создает тормозной момент, величина которого зависит от частоты вращения ротора и тока в обмотке возбуждения, а направление момента всегда противоположно направлению вращения ротора генератора. При соответствующем токе в обмотке возбуждения тормозной момент генератора дополнительно нагружает двигатель лебедки подъемника и позволяет осуществить плавное торможение и остановку кабины как при ее подъеме, так и при опускании.