
Курс лекций по специальности 140305 «Ядерные реакторы и энергетические установки» направления 140300 «Ядерная физика и технологии» Издательство Томского политехнического университета
| Вид материала | Курс лекций |
- Программа дисциплины опд. Ф. 09. Компьютерный практикум для студентов специальности, 61.42kb.
- Программа дисциплины ф. 7 Физика Разделы «Механика», «Колебания и волны», «Молекулярная, 138.74kb.
- Программа дисциплины сд. Ф техническая термодинамика для студентов специальности 140305, 105.32kb.
- Программа дисциплины дс методы радиационного контроля для студентов специальности 140305, 136.52kb.
- Программа дисциплины дс. 02 Вычислительные методы в квантовой физике для студентов, 157.04kb.
- Программа дисциплины ф. 3 Линейная алгебра для студентов специальности 140305 (Ядерные, 101.89kb.
- Курс лекций Издательство Томского политехнического университета Томск 2008, 2560.3kb.
- Конспект лекций Рекомендовано в качестве учебного пособия Редакционно-издательским, 1023.31kb.
- Редакционно-издательским советом Томского политехнического университета Издательство, 1434.78kb.
- Редакционно-издательским советом Томского политехнического университета Издательство, 3189.24kb.
Министерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Утверждаю
Директор ФТИ
В.П. Кривобоков
« » 2010 г.
Т.Х. Бадретдинов
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Курс лекций по специальности 140305 «Ядерные реакторы и
энергетические установки» направления 140300 «Ядерная физика
и технологии»
Издательство Томского политехнического университета
2010
Экономичное, надежное и безопасное функционирование такого сложного технического объекта как АЭС может быть обеспечено с помощью лишь самых совершенных технических средств, монтаж, наладка и эксплуатация которых немыслимы без знания теории и практики автоматизации.
ТАУ вместе с теорией функционирования элементов систем управления (датчиков, регуляторов, исполнительных механизмов) образует более широкую отрасль науки – автоматику. Автоматика, в свою очередь, является одним из разделов технической кибернетики. Техническая кибернетика изучает сложные автоматизированные системы управления технологическими процессами и предприятиями, построенными с использованием управляющих электронных вычислительных машин. Цель изучения дисциплины – формирование знаний и навыков в области автоматизированного управления технологическими процессами АЭС.
Автоматизированная система управления технологическим процессом АЭС(АСУ ТП АЭС) предназначена для выработки и реализации управляющих, информационных и функций защиты технологического процесса в автоматическом и автоматизированном режиме.
Автоматизированный режим характеризуется участием человека в выработке (принятии) решений и их реализации. При этом различают следующие варианты:
"ручной" режим, при котором комплекс технических средств представляет оперативному персоналу контрольно-измерительную информацию о состоянии ТОУ, а выбор и осуществление управляющих воздействий дистанционно или по месту производит человек-оператор;
режим "советчика", при котором комплекс технических средств вырабатывает рекомендации по управлению, а решение об их использовании реализуется оперативным персоналом;
"диалоговый режим", когда оперативный персонал имеет возможность корректировать постановку и условия задачи, решаемой комплексом технических средств системы при выработке рекомендаций по управлению объектом.
"Автоматический режим", при котором функция управления осуществляется без участия человека. При этом различают:
режим косвенного управления, когда средства вычислительной техники автоматически изменяют параметры настройки локальных систем автоматического управления (регулирования);
режим прямого (непосредственного) цифрового управления, когда управляющее вычислительное устройство непосредственно воздействует на исполнительные механизмы.
Технологический объект управления (ТОУ) представляет собой совокупность технологического оборудования и реализованного на нем по соответствующим инструкциям или регламентам технологического процесса производства продуктов, полупродуктов, изделий или энергии.
К технологическим объектам управления относятся:
технологические агрегаты и установки (группы станков), реализующие самостоятельный технологический процесс;
отдельные производства (цехи, участки), если управление этим производством носит, в основном, технологический характер, то есть заключается в реализации рациональных режимов работы взаимосвязанного технологического оборудования (агрегатов, участков).
Совместно функционирующие ТОУ и управляющая им АСУТП образуют автоматизированный технологический комплекс (АТК).
Организационно АСУ ТП АЭС состоит из: 1. Персонала и 2. Комплекса технических и программных средств, предназначенных для автоматизации его (персонала) деятельности.
АСУТП АЭС - это организационно-техническая система управления АЭС в целом в соответствии с принятыми критериями управления, в которой сбор и обработка необходимой информации осуществляется с применением средств вычислительной техники.
Критерий управления в АСУТП - это соотношение, характеризующее степень достижения целей управления (качество функционирования технологического объекта управления в целом) и принимающее различные числовые значения в зависимости от используемых управляющих воздействий. Отсюда следует, что критерий обычно является технико-экономическим (например, себестоимость выходного продукта при заданном его качестве, производительность ТОУ при заданном качестве выходного продукта и т.п.) или техническим показателем (параметры процесса, характеристики выходного продукта).
Целями создания АСУ ТП являются:
Стабилизация эксплуатационных показателей технологического оборудования и режимных параметров технологического процесса;
Увеличение выхода товарной продукции;
Уменьшение материальных и энергетических затрат;
Выбор рациональных технологических режимов;
Улучшение качественных показателей конечной продукции;
Предотвращение аварийных ситуаций.
Качество управления – характеристика системы управления, определяется выбором эффективного решения, своевременностью его принятия и возможностями реализации. Для обеспечения высокого качества управления необходимо: своевременное получение исходной информации (о состоянии процесса, тенденциях его протекания, условиях производства и задачах управления), ее обработка в течение определенного ограниченного периода времени с использованием достаточно совершенных математических методов и моделей, своевременная реализация полученных решений. Ключевым критерием качества работы АСУ ТП является стабильность заданных характеристик технологического процесса с учетом противоаварийной защиты для всех стадий технологического процесса. Кроме того, предполагается, что достижение вышеозначенных целей должно способствовать улучшению экологической обстановки за счет уменьшения загрязненности промышленных стоков и выброса вредных веществ в атмосферу. В целом, внедрение АСУ ТП должно обеспечивать достижение главной цели предприятия в области качества: получение стабильной прибыли за счет производства конкурентоспособной продукции, удовлетворяющей требованиям потребителей.
Достижение поставленных целей осуществляется системой посредством выполнения совокупности ее функций.
Функция АСУТП представляет собой совокупность действий системы, обеспечивающих достижение частной цели управления.
При этом под совокупностью действий системы понимают описанную в эксплуатационной документации последовательность операций и процедур, выполняемых элементами системы для ее реализации.
Функции АСУТП по направленности действий (назначению функции) делятся на основные и вспомогательные, а по содержанию этих действий - на управляющие и информационные.
К основным функциям АСУТП относятся функции, направленные на достижение целей функционирования системы, осуществляющие управляющие воздействия на ТОУ и (или) обмен информацией со смежными системами управления. Обычно к ним относят также информационные функции, обеспечивающие оперативный персонал АТК информацией, необходимой ему для управления технологическим процессом производства.
К вспомогательным функциям АСУТП относятся функции, направленные на достижение необходимого качества функционирования (надежности, точности и т.п.) системы, реализующие контроль и управление ее работой.
К управляющим функциям АСУТП относятся функции, содержанием каждой из которых является выработка и реализация управляющих воздействий на соответствующий объект управления - ТОУ или его часть для основных функций и на АСУТП или ее часть для вспомогательных.
Например, основные управляющие функции: регулирование (стабилизация) отдельных технологических переменных; программное логическое управление технологическими аппаратами;
вспомогательные управляющие функции: аварийное отключение оборудования АСУТП; переключение технических средств АСУТП на аварийный источник питания и т.п.
К информационным функциям АСУТП относятся функции, содержанием каждой из которых является получение и преобразование информации о состоянии ТОУ или АСУТП и ее представление в смежные системы или оперативному персоналу АТК.
Например, основные информационные функции: контроль и измерение технологических параметров; подготовка и передача информации в смежные системы управления и т.п.;
вспомогательные информационные функции: контроль состояния оборудования АСУТП;
Принципы управления – важнейшие исходные положения теории управления.
Принцип наблюдаемости – любую систему необходимо увидеть. Сенсоры, датчики. Принцип идентифицируемости - Видеть систему – значит ее узнать, т.е. идентифицировать, отнести к какому-нибудь классу. Используя шаблоны (модели) мы можем отличить одну систему от другой.
Принцип управляемости - Когда мы видим систему, у нас возникает мотив для управления (воздействия на систему, чтобы перевести ее из одного состояния в др.)
Классификация систем управления.
Системы АСУ ТП весьма разнообразны. Обычно пользуются общей классификацией АСУТП, то есть правилами разбиения всего множества этих систем на такие подмножества (классификационные группы), в пределах которых все входящие в них АСУТП одинаковы, близки или похожи в том или ином отношении.
К основным классификационным признакам АСУТП относятся:
1.уровень, занимаемый ТОУ и АСУТП в организационно-производственной структуре предприятия;
2.характер протекания технологического процесса во времени; показатель условной "информационной мощности" ТОУ;
3.уровень функциональной надежности АСУТП;
4.тип функционирования АСУТП.
По 1 таблица 1
| Наименование класса | Код | Примеры ТОУ, пояснения |
| АСУТП нижнего уровня | 1 | Технологические агрегаты, установки, участки машиностроительного производства |
| АСУТП верхнего уровня | 2 | Группы установок, цехи, производства; не включают в себя АСУТП нижнего уровня |
| АСУТП многоуровневые | 3 | То же, что и в классе 2, но включая АСУТП нижнего уровня |
По 2 таблица 2
| Наименование класса АСУТП | Код | Характер технологического процесса |
| АСУ непрерывным технологическим процессом | Н | Непрерывный, с длительным поддержанием режимов, близких к установившимся, и практически безостановочной подачей сырья и реагентов |
| АСУ непрерывно-дискретным технологическим процессом | П | Сочетание непрерывных и прерывистых режимов функционирования различных технологических агрегатов или на различных стадиях процесса (в том числе - периодические процессы) |
| АСУ дискретным технологическим (производственным) процессом | Д | Прерывистый, с несущественной для управления длительностью технологических операций |
В зависимости от показателя условной "информационной мощности" ТОУ АСУТП подразделяются на классы в соответствии с табл.3.
| Условная информационная мощность АСУТП | Код | Число измеряемых или контролируемых технологических переменных | |
| | | Минимальное | Максимальное |
| Наименьшая | 1 | - | 40 |
| Малая | 2 | 41 | 160 |
| Средняя | 3 | 161 | 650 |
| Повышенная | 4 | 651 | 2500 |
| Большая | 5 | 2501 | Не ограничено |
Укрупненная классификация АСУТП по уровню функциональной надежности приведена в табл.4.
Таблица 4
| Уровень функциональной надежности | Код | Краткая характеристика уровня надежности |
| Минимальный | 1 | Регламентируется, но отказы в АСУТП не приводят к остановам ТОУ |
| Средний | 2 | Регламентируется, отказы в АСУТП приводят к остановам ТОУ |
| Высокий | 3 | Жестко регламентируется, т.к. отказы в АСУТП создают возможность аварий ТОУ |
Классификация АСУТП по типу функционирования АСУТП осуществляется в соответствии с табл.5.
Таблица 5
| Условное наименование типа функционирования АСУТП | Код | Краткая характеристика особенностей функционирования системы |
| Информационный | И | Автоматически выполняются только информационные функции, решения по управлению принимает и реализует оператор |
| Локально-автоматический | Л | Автоматически выполняются информационные функции и функции локального управления (регулирования). Решения по управлению процессом в целом принимает и реализует оператор |
| Советующий | С | Автоматически выполняются функции информационные и локального управления, а также вырабатываются и представляются оператору рекомендуемые значения управляющих воздействий, обеспечивающие оптимизацию режима работы ТОУ в соответствии с выбранным критерием |
| Автоматический | А | Все функции АСУТП, включая управление процессом по критерию, выполняются автоматически |
Найденный в соответствии с приведенными таблицами подкласс АСУТП обозначается в кодовой или словесной форме.
Кодовое обозначение класса АСУТП строится из цифровых и буквенных индексов классификации, приведенных в табл.1-5, и имеет следующую структуру:
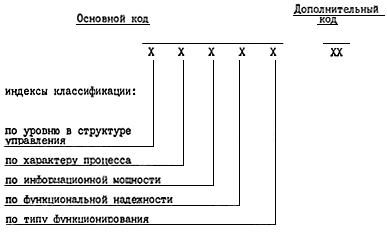
Классификация АСУТП, обозначаемая дополнительным кодом, не регламентируется, устанавливается в отраслевых нормативных материалах и может быть использована министерствами (ведомствами) для разбиения множества АСУТП с дополнительными (частными) целями.
Словесное обозначение класса АСУТП строится по аналогии со следующим примером:
"АСУ непрерывным технологическим процессом в агрегате, относящаяся к "советующему" типу, с 360 технологическими переменными и высшим уровнем функциональной надежности.
Водо-водяные корпусные реакторы в настоящее время являются наиболее популярной и испытанной конструкцией. Известно, что они могут использоваться в двухконтурных схемах с некипящей водой и в одноконтурных схемах с кипением воды в активной зоне.
В отечественном реакторостроении реакторы с водой под давлением обычно используются в двухконтурных схемах, получивших название ВВЭР (водо-водяные энергетические реакторы).
По сравнению с канальными реакторами преимуществом ВВЭР является большая компактность, позволяющая все оборудование первого контура герметизировать в защитной оболочке (гермозоне), отсюда – более простые коммуникации и условия работы на реакторе. Но это создает и свои недостатки: необходимость надежных толстостенных корпусов реактора, невозможность перегрузки топлива на ходу без остановки реактора, невозможен режим ядерного перегрева пара.
В России реакторы типа ВВЭР используются на Нововоронежской АЭС, Кольской, Калининской, Балаковской и Ростовской. В ближайшем зарубежье по этим же проектам построены АЭС на Украине, в Армении, Болгарии, Финляндии, Германии, Чехии. На рис.1 представлен вид щита управления БЩУ Балаковской АЭС,
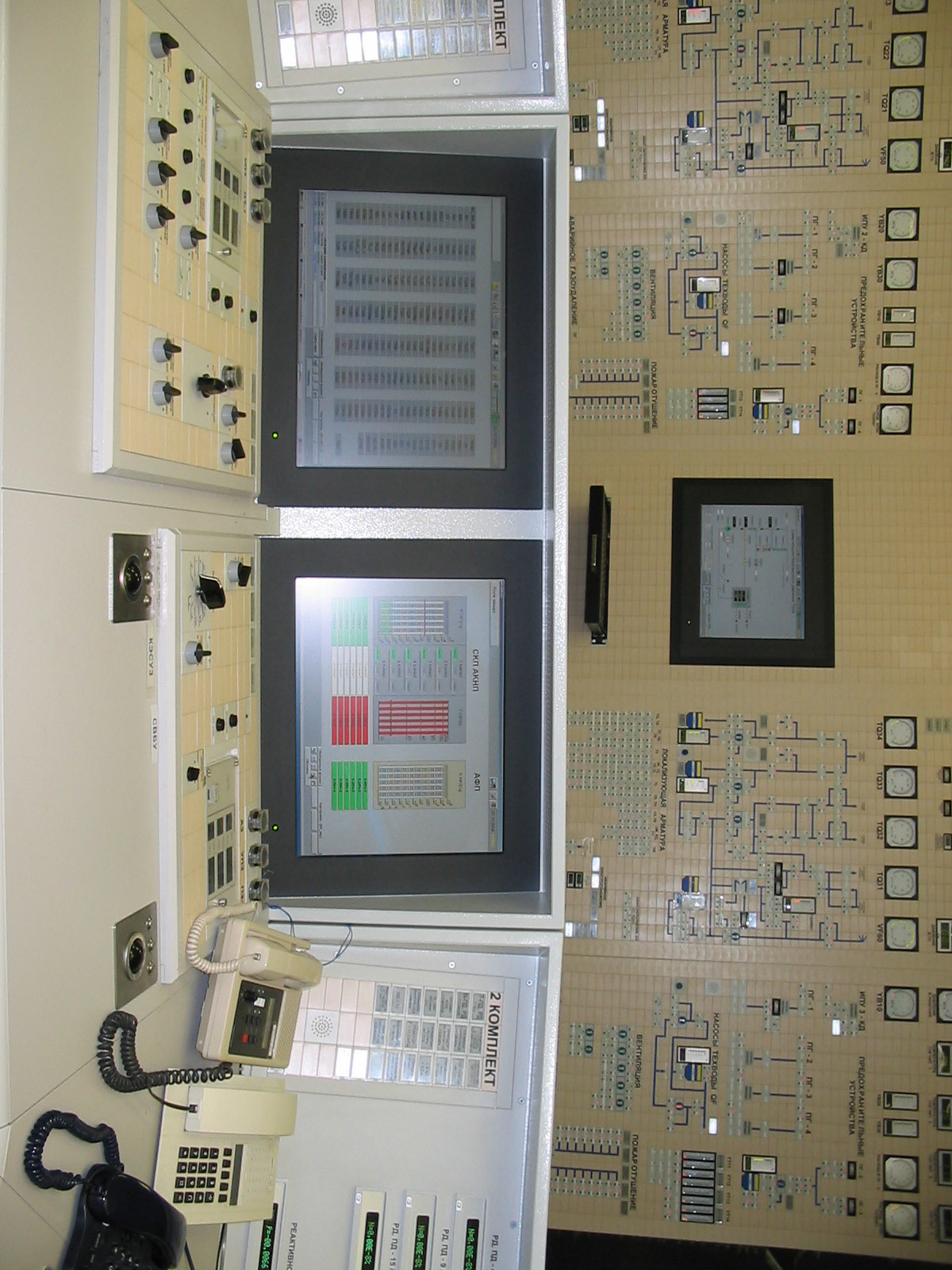 а на рис.2 – вид нового щита управления 3-го блока Калининской АЭС.
а на рис.2 – вид нового щита управления 3-го блока Калининской АЭС. 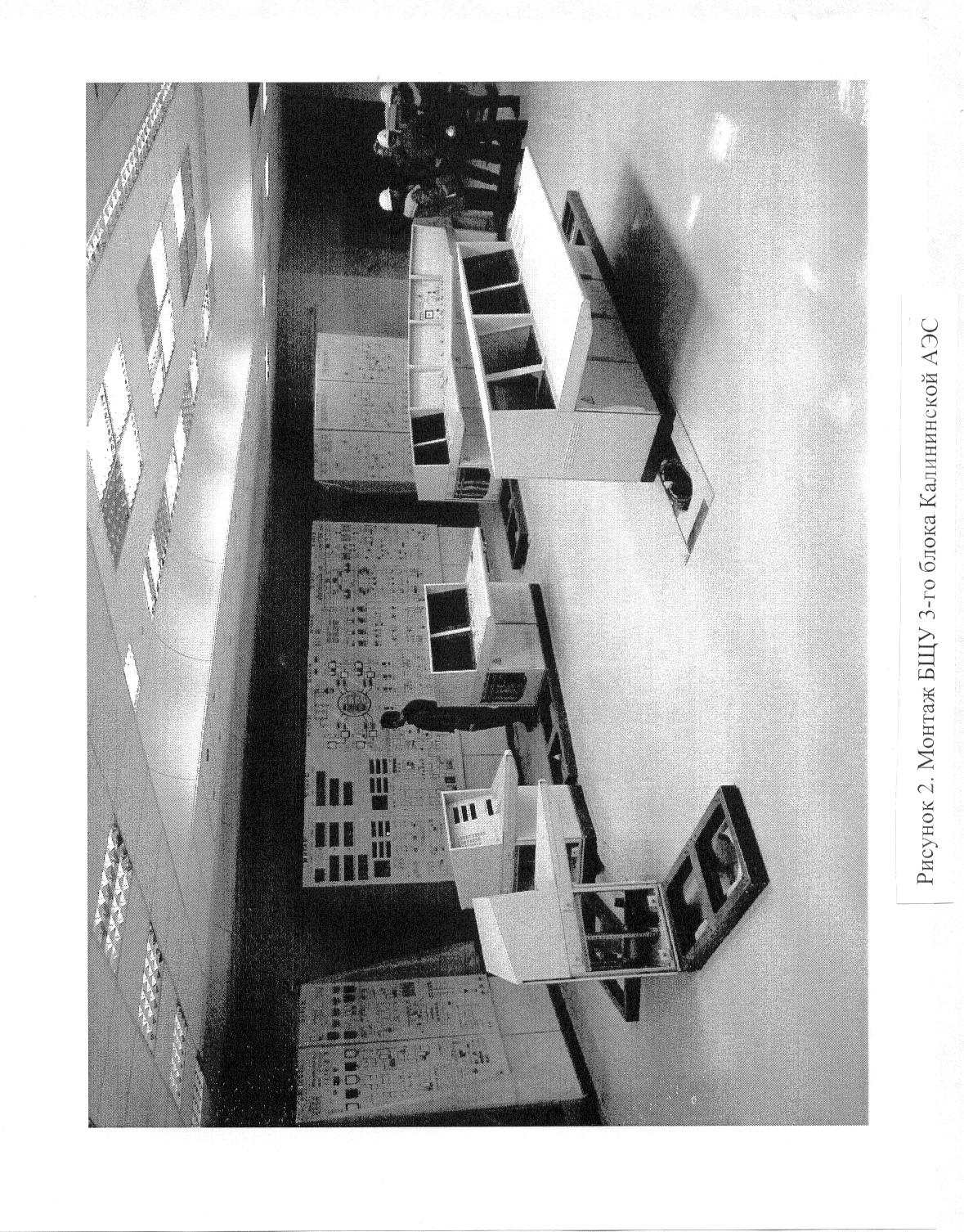 После Чернобыльской аварии принято решение о развитии отечественной атомной энергетики на базе реакторов ВВЭР, как наиболее надежном типе реакторов.
После Чернобыльской аварии принято решение о развитии отечественной атомной энергетики на базе реакторов ВВЭР, как наиболее надежном типе реакторов. На рис.3 приведена упрощенная схема двухконтурной АЭС с реактором ВВЭР-1000 [2].
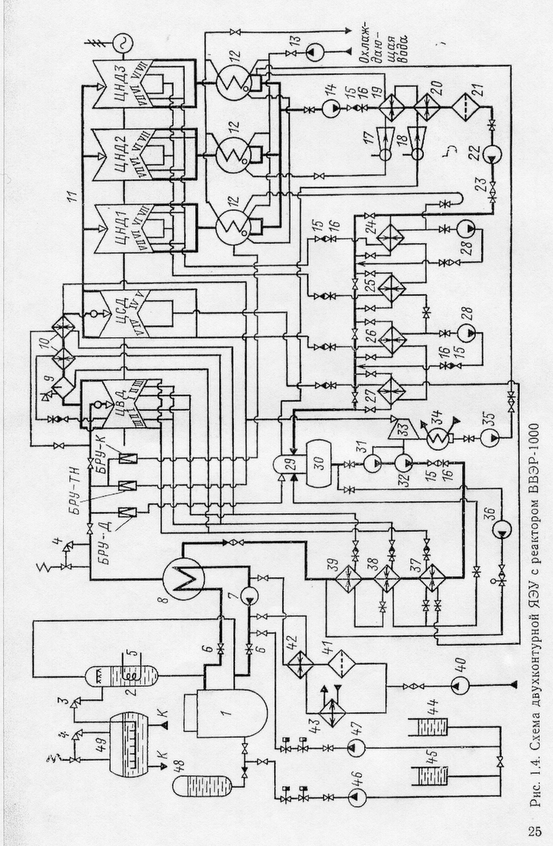
Первый контур состоит из реактора 1 и четырех тепловых петель, каждая из которых включает парогенератор 8, главный циркуляционный насос (ГЦН) 7, главные запорные задвижки 6 и главные циркуляционные трубопроводы. Вода в реактор поступает под давлением 16,6 МПа с температурой 562 К. В активной зоне она нагревается до 595 К и идет в парогенератор, где отдает теплоту теплоносителю второго контура. Из парогенератора с помощью ГЦН вода подается обратно в реактор. Главные запорные задвижки между реактором и парогенератором позволяют отключить от реактора любую петлю.
Кипения воды в каналах первого контура нет, что обусловлено высоким давлением в контуре. Для поддержания необходимого давления требуется внешний источник, которым служит паровой компенсатор давления
(ПКД) 2. Он компенсирует изменения объема теплоносителя при его нагреве в контуре и создает начальное давление. Для предотвращения повышения давления сверх нормы в паровое пространство ПКД вспрыскивается теплоноситель из холодной ветви трубопровода. Если при этом повышение давления не прекращается, то срабатывает предохранительный клапан 3, соединенный с барботером 49. Температура воды в барботере поддерживается постоянной ~333 К для конденсации пара из ПКД. Если давление в барботере превышает допустимое, то срабатывает другой предохранительный клапан 4 и теплоноситель первого контура выбрасывается в помещение, что, однако, происходит редко.
Вода первого контура приобретает большую наведенную активность, из-за присутствия примесей (продукты коррозии, соли и т.д.), поэтому все оборудование помещается в необслуживаемом помещении, и должно работать без сбоев в течение года без обслуживания персонала. Для очистки воды первого контура от примесей некоторая часть ее отводится в фильтры 41. Перед фильтрами вода охлаждается до 318 К в регенеративном теплообменнике 42 и холодильнике 43. Компенсация потерь воды первого контура производится подпиточными насосами 40. Реактор снабжен системой аварийного охлаждения активной зоны (САОЗ), которая обеспечивает отвод теплоты из активной зоны в случае разрыва трубопровода первого контура. САОЗ включает в себя насосы низкого (ННД) давления 46 и высокого (НВД) 47 давления
гидроаккумуляторы 48, в которых вода находится под давлением азота, и баки запасной воды 44 и раствора борной кислоты 45.
Если потеря теплоносителя идет с небольшой скоростью, включаются насосы НВД. При большой разгерметизации (диаметр трубы равен 850 миллиметров) вначале вода под давлением подается из гидроаккумулятора, затем включаются НВД, а если и этого мало – включаются ННД.
Из парогенератора ПГ пар направляется в турбину 11. Давление пара на выходе ПГ равно 6,3 МПа, а температура –551 К, влажность – менее 0,1%. Т.е. в отличие от ТЭЦ в ЯЭУ на первых ступенях турбины процесс расширения идет во влажном паре с низким КПД. Для такого пара нужны специальные турбины. На ВВЭР-1000 работают турбины К-1000-60/1500 мощностью 1000 МВт. Давление свежего пара на входе турбины составляет 5,88 МПа, расход пара 1780 кГ/с, частота вращения–1500 об/мин. Проточная часть турбины состоит из параллельно включенных цилиндров высокого давления (ЦВД), среднего давления (ЦСД) и трех параллельных цилиндров низкого давления (ЦНД). После ЦВД пар отводится в сепаратор 9, где из него выделяется вода. Одной ступени сепарации недостаточно, поэтому пар перегревается в промежуточном пароперегревателе (ПП) 10 и поступает на ЦСД и ЦНД уже с параметрами 1,12 МПа и 523 К, а после расширения – в конденсаторы 12. Конечная влажность за турбиной –14%.
Конденсатор работает в условиях достаточно глубокого вакуума, давление в нем поддерживается за счет конденсации пара. Теплота при конденсации отбирается технической водой, охлаждающей теплообменную поверхность конденсатора. Охлаждающая вода охлаждается в градирнях или берется из природного водоема, а для ее циркуляции используются циркуляционные насосы 13.
Вода из конденсатора конденсатными насосами первой 14 и второй ступени 22 через дополнительные конденсаторы 19 и 20, конденсатоочистку 21 и подогреватели низкого давления (ПНД) 2427 подается в деаэратор 29 устройство для термической дегазации воды при ее нагревании до температуры насыщения. Нагрев воды происходит паром, который отбирается от турбины. На выходе конденсатных насосов установлены обратные клапаны 15 для предотвращения обратного движения среды при выключении конденсатных насосов. Подогреватели ПНД служат для подогрева воды до температуры, несколько меньшей, чем в деаэраторе. Для этого из турбины отбирается часть пара и направляется в ПНД. Пар конденсируется, нагревая воду магистрали. Вода после конденсатных насосов называется питательной. Нагретая и деаэрированная питательная вода поступает в бак питательной воды (БПВ) 30.
Из БПВ питательными насосами 32 через системы подогревателей высокого давления (ПВД) 3739 (нагрев до 493К) вода подается в парогенератор. Для этого используется питательный насос с приводом от конденсационной турбины 33 с отдельным конденсатором 34 и конденсационным насосом 35. Питательный насос обеспечивает повышение давления от 0,685 МПа в деаэраторе до 6,4 МПа в парогенераторе. Если нагрузка на турбине мала ( менее 30%), то подача пара к турбине привода питательного насоса производится через быстродействующую редукционную установку БРУ-ТН. На случай аварии с потерей подачи питательной воды в ПГ предусмотрена установка трех аварийных питательных насосов 36 с электрическим приводом, включаемых параллельно главным питательным насосам и тракту ПВД.
Параллельно турбине включены быстродействующие редукционные установки БРУ-К и БРУ-Д для сброса пара помимо турбины в главные конденсаторы и в деаэратор при внезапном выключении турбины и при пусках и остановках ЯЭУ, когда пара настолько мало, что он не обеспечивает поддержание устойчивой частоты вращения холостого хода турбины.
КПД блока ВВЭР-1000 равен 33%. Для увеличения КПД необходимо повышать начальные параметры пара и использовать перегретый пар на входе турбины. Ядерный перегрев пара непосредственно в топливных каналах активной зоны был впервые в мире осуществлен на Белоярской АЭС в реакторах типа АМБ с параметрами пара 783К и 10 МПа. Используемые сегодня ЯЭУ с канальными кипящими реакторами типа РБМК пока не используют ядерный перегрев пара и работают на пониженных параметрах пара (давление до 6,3 МПа). Поэтому по величине КПД они не имеют преимуществ перед АЭС с реакторами ВВЭР.
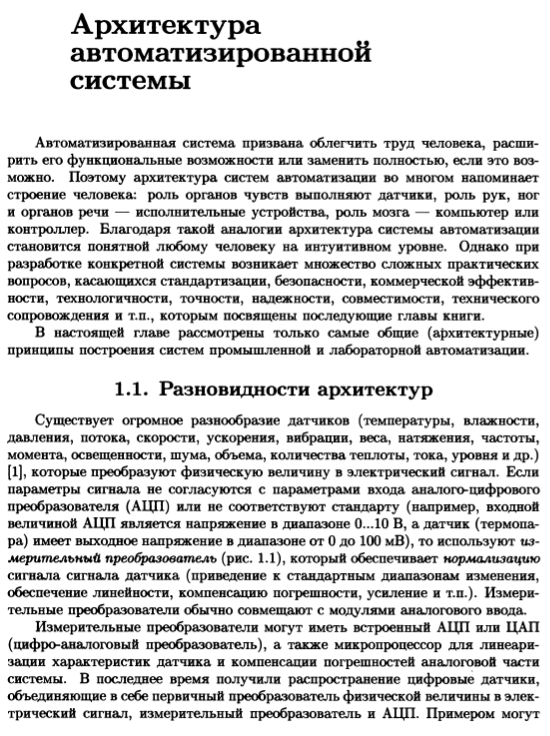
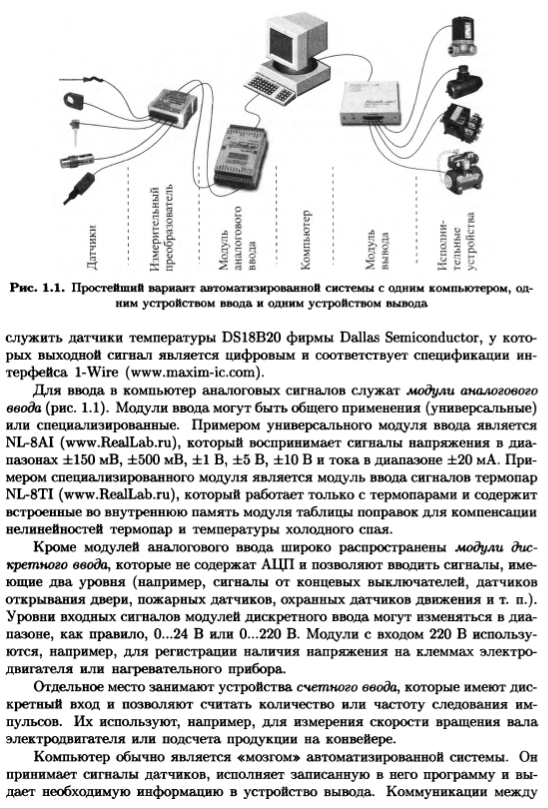
В последнее время наметилась тенденция стирания грани между компьютером и контроллером. С одной стороны, контроллеры позволяют подключить монитор, мышь и клавиатуру, с другой стороны, появилось большое количество промышленных компьютеров, которые имеют специальное конструктивное исполнение и другие свойства, характерные для контроллеров. В связи с этим в термины «компьютер» и «контроллер» часто употребляются как синонимы.
Устройства вывода (модули вывода) позволяют выводить дискретные, частотные или аналоговые сигналы. Дискретные сигналы используются, например, для включения электродвигателей, электрических нагревателей, для управления клапанами, фрамугами, насосами и другими исполнительными устройствами. Частотный сигнал используется обычно для управления средней мощностью устройств с большой инерционностью с помощью широтно-импульсной модуляции.
Требования к архитектуре
Архитектура автоматизированной системы — это наиболее абстрактное ее представление, которое включает в себя идеализированные модели компонентов системы, а также модели взаимодействий между компонентами. Компоненты архитектуры находятся во взаимосвязи, образуя единую автоматизированную систему и обеспечивая решение поставленной задачи автоматизации на архитектурном уровне. В то же время правильно спроектированная архитектура допускает множество технических реализаций путем выбора различных компонентов архитектуры и методов взаимодействия между ними.
Элементами или что то же самое компонентами архитектуры являются модели датчиков, устройств ввода-вывода, измерительных преобразователей, программируемых логических контроллеров, компьютеров, интерфейсов, протоколов, промышленных сетей, исполнительных устройств, драйверов, каналов передачи информации.
Основным требованием при создании архитектуры является знание принципов функционирования объекта автоматизации и знание технических характеристик аппаратных и программных средств, используемых для построения системы.
При построении архитектуры должны быть заложены следующие свойства будущей автоматизированной системы:
слабая связанность элементов архитектуры между собой, т.е. декомпозицию системы на части следует производить так, чтобы поток информации через связи был минимален и через них не замыкались контуры автоматического регулирования;
тестируемость - возможность установления факта правильного функционирования;
диагностируемость (возможность нахождения неисправной части системы);
ремонтопригодность (возможность восстановления работоспособности за минимальное время при экономически оправданной стоимости ремонта);
надежность (например, путем резервирования);
простота обслуживания и эксплуатации (минимальные требования к квалификации и дополнительному обучению эксплуатирующего персонала);
безопасность (соответствие требованиям промышленной безопасности и технике безопасности);
защищенность системы от вандалов и неквалифицированных пользователей;
экономичность (экономическая эффективность в процессе функционирования);
модифицируемость (возможность перенастройки для работы с другими технологическими процессами);
функциональная расширяемость (возможность ввода в систему дополнительных функциональных возможностей, не предусмотренных в техническом задании);
наращиваемость (возможность увеличения размера автоматизированной системы при увеличении размера объекта автоматизации);
открытость;
возможность переконфигурирования системы для работы с новыми технологическими процессами;
максимальная длительность жизненного цикла системы без существенного морального старения, достигаемая путем периодического обновления аппаратных и программных компонентов, а также путем выбора долгоживущих промышленных стандартов;
минимальное время на монтаж и пуско-наладку (развертывание) системы. Архитектура системы может быть различной в зависимости от решаемой
задачи автоматизации. Такими задачами могут быть:
мониторинг (продолжительные измерение и контроль с архивированием полученной информации);
автоматическое управление (в системе с обратной связью или без нее);
диспетчерское управление (управление с помощью человека-диспетчера, который взаимодействует с системой через человеко-машинный интерфейс);
обеспечение безопасности.
Любая из перечисленных задач может выполняться на большом расстоянии между объектом автоматизации и системой. В этом случае говорят о задачах телемеханики (дистанционные измерение, управление, сигнализация). Однако в связи с тем, что каналы дистанционной связи (Интернет, радиоканал, оптико-волоконный канал, проводной канал) органично входят практически в любую систему автоматизации, задачу телемеханики все реже выделяют как самостоятельную.
Построение любой АСУ начинается с декомпозиции (деления на части) системы на подсистемы. Декомпозиция может быть функциональной (алгоритмической) или объектной.
При объектной декомпозиции используются распределенные системы управления, когда каждый объект автоматизации оборудуется локальным технологическим контроллером, решающим задачи в пределах этого объекта. При функциональной декомпозиции систему автоматизации делят на части, группируя сходные функции, и для каждой группы функций используют отдельный контролер. Оба вида декомпозиции могут быть использованы совместно. Выбор способов декомпозиции является творческим процессом и во многом определяет эффективность будущей системы.
Объектная декомпозиция объекта автоматизации используется в современных SCADA-пакетах. Она аналогична объектной декомпозиции, используемой в объектно-ориентированном программировании (ООП), основными признаками которой являются абстрагирование, инкапсуляция, модульность, иерархическая организация. Классам ООП соответствуют контроллеры (ПЛК), объектам — контроллеры с заданными свойствами (параметрами), инкапсуляция соответствует сокрытию конкретной реализации; благодаря инкапсуляции существенно упрощается структура системы с точки зрения системного интегратора и тем самым уменьшается количество возможных ошибок. Модульность обеспечивается модульностью аппаратного обеспечения системы, иерархичность естественным путем вытекает из требований заказчика.
Независимо от метода декомпозиции, основным ее результатом должно быть представление системы в виде набора слабо связанных частей. Слабая связь между частями системы означает отсутствие между ними обратных связей или малость модуля петлевого усиления при наличии таких связей, а также отсутствие интенсивного обмена информацией.
Программные модули, реализующие отдельные функции в разных контроллерах, могут взаимодействовать между собой по промышленной сети с помощью технологии СОМ фирмы Microsoft, CORBA консорциума OMG или SOAP консорциума W3C. Для разработки заказного программного обеспечения распределенных систем управления используют специальную среду разработки систем реального времени или стандартное программное обеспечение на основе технологии DCOM фирмы Microsoft.