
Автор Баташов Сергей Иванович (Ф. И. О) учебно-методический комплекс
| Вид материала | Учебно-методический комплекс |
- Автор Баташов Сергей Иванович (Ф. И. О) учебно-методический комплекс, 231.34kb.
- Чиркун Сергей Иванович учебно-методический комплекс, 257.6kb.
- Чиркун Сергей Иванович учебно-методический комплекс, 476.75kb.
- Корниенко Сергей Иванович, доктор исторических наук, профессор кафедры новейшей истории, 248.33kb.
- Тюрин Сергей Борисович учебно-методический комплекс, 387.27kb.
- Филиппов Иван Иванович, к т. н., профессор учебно-методический комплекс, 1959.42kb.
- Учебно-методический комплекс удк ббк п рекомендовано к изданию Учебно-методическим, 1762.72kb.
- Беряков Николай Иванович, к т. н., доцент учебно-методический комплекс, 963.95kb.
- Макаров Аркадий Иванович, кэн, доцент учебно-методический комплекс, 1567.16kb.
- Тюрин Сергей Борисович учебно-методический комплекс, 369.3kb.
1.6 Тематика кУРСОВых работ и методические рекомендации по их выполнению
В процессе изучения дисциплины «Автоматические системы управления», студент-заочник должен выполнить самостоятельно контрольную работу. В контрольной работе анализируется принцип действия системы автоматического пуска электропоезда постоянного тока и процессы при его разгоне.
Примерный объем контрольной работы – 10 страниц.
Работа должна быть выполнена в тетради, сброшюрованной из листов формата 210х297 мм, с обязательным оставлением полей для замечаний рецензента, аккуратно, разборчивым почерком. При выборе требуемых расчетных величин, использовании таблиц, формул, справочных материалов необходимо ссылаться на источники. Графическая часть работы выполняется на миллиметровой бумаге. Таблицы и графики необходимо вставлять в тетрадь так же, как и страницы с текстом в корешок. Страницы работы, таблицы и графики должны быть пронумерованы, работу следует подписать и указать дату ее выполнения.
После получения прорецензированной работы необходимо, независимо от того зачтена она или нет, исправить все замечания и сделать требуемые дополнения. Если работа не зачтена, следует в кратчайший срок выполнить требования рецензента и передать исправленную работу вместе с рецензией для повторной проверки. При этом нет необходимости переписывать целиком работу или отдельные ее разделы, а также производить исправления по написанному тексту; все исправления и дополнения должны быть сделаны на отдельных листах и вклеены или вшиты в соответствующие места работы. Стирать или зачеркивать замечания рецензента запрещается.
Имеется рабочая программа и задание на контрольную работу с методическими указаниями, изданные в РОАТ.
1.7 Самостоятельная работа
| Разделы и темы для самостоятельного изучения | Виды и содержание самостоятельной работы |
| Раздел 1 Исходные понятия об автоматическом управлении производственными и транспортными процессами Иерархические принципы построения систем управления. Системы автоведения и телемеханического управления ЭПС. Технико-экономическая эффективность автоматизации ЭПС.[1; 2; 3, с. 5-15]. Раздел 2 Функциональные схемы систем автоматического управления ЭПС Системы автоматической стабилизации и программного регулирования тока тяговых двигателей. Многоканальные САР ЭПС. Многоконтурные системы автоматического управления ЭПС. Двухконтурная система с регулированием скорости движения поезда и тока тяговых двигателей. Примеры функциональных схем САУ, применяемых на отечественном ЭПС.[1; 8; 3, с. 15-48 ]. Раздел 3 Функциональные элементы САУ ЭПС Датчики тока на основе трансформаторов постоянного тока и преобразователя Холла. Датчик угла коммутации ЭПС переменного тока с рекуперацией. Датчики скорости на базе тахометрических генераторов и индукционные. Реализация управляющих элементов на основе аналоговых и цифровых интегральных микросхем. Управляемый выпрямитель как исполнительный элемент на ЭПС однофазно-постоянного тока. Применение импульсных преобразователей для питания тяговых двигателей на ЭПС постоянного тока. [1; 2; 3, с.15-48]. Раздел 4 Системы автоматического и телемеханического управления ЭПС Централизованные системы автоведения поездов метрополитена. Системы автоведения электропоездов и грузовых поездов. Телемеханические системы управления ЭПС. [1; 3, с.223-275; 4; 5; 6]. Раздел 5 Надежность и техническое обслуживание систем автоматики ЭПС Надежность функциональных элементов САУ. Расчет показателей надежности элементов и систем автоматики ЭПС. Структурная надежность САУ и способы ее повышения. Особенности технического обслуживания систем автоматики ЭПС. Способы обеспечения контролепригодности и ремонтопригодности систем автоматики. Техническая диагностика САУ ЭПС.[1;11, 3, с. 276-295]. | Проработка учебного материала по учебной и научной литературе, работа с вопросами для самопроверки. Обсуждение проблемных вопросов с преподавателями в рамках индивидуальных консультаций. Выполнение тестов и заданий из лабораторного практикума с применением математического пакета Mathcad и Excel. |
Результаты самостоятельной работы контролируются при аттестации студента при защите контрольной работы.
- Учебно-методическое обеспечение дисциплины
Основная
- 1. Грищенко А.В., Базилевский Ф.Ю., Бабков Ю.В. Автоматизация локомотивов. Уч.пос. - М.: Маршрут, 2007 - 331 с.
- Луков Н.М., Космодамианский А.С. Автоматические системы управления локомотивов: Учебник для вузов ж.-д. транспорта – М.: ГОУ «Учебно-методический центр по образованию на ж.-д. транспорте», 2007. – 429 с.
- Бабков Ю.В., Базилевский Ф.Ю., Грищенко А.В. Автоматизация локомотивов. – М.: ГОУ «Учебно-методический центр по образованию на ж.-д. транспорте», 2007. – 323 с.
Дополнительная
- Автоматизация электрического подвижного состава / Под ред. А.Н.Савоськина. — М.: Транспорт, 1990
- Системы автоматического и телемеханического управления электроподвижным составом. /Баранов Л.А., Ерофеев Е.В. и др.; Под ред. Л.А.Баранова. — М.: Транспорт, 1984.
- К у н А.П. Системы автоматического регулирования электроподвижного состава метрополитена. — М.: ВЗИИТ, 1995.
- К у н А.П. Системы автоматического управления электроподвижным составом на базе микро-ЭВМ. — М.: ВЗИИТ, 1991.
- Клюев А.С. Автоматическое регулирование. — М.: Высшая школа. 1986.
- Головинский О.И. Основы автоматики. — М.: Высшая школа, 1987.
- Андрющенко В.А. Теория систем автоматического управления. — Л.: Изд.Ленинградского ун-та, 1990.
1. 9 Материально-техническое и информационное обеспечение дисциплины
В учебном процессе для освоения дисциплины используются следующие технические средства:
- учебная лаборатория;
- компьютерное и мультимедийное оборудование (на лекциях, для самоконтроля знаний студентов, для обеспечения студентов методическими рекомендациями в электронной форме);
- приборы и оборудование учебного назначения (при выполнении лабораторных работ);
- пакет прикладных обучающих программ (для самоподготовки и самотестирования);
- видео - аудиовизуальные средства обучения (интерактивные доски, видеопроекторы);
- электронная библиотека курса (в системе КОСМОС - электронные лекции, тесты для самопроверки, тесты для сдачи зачёта).
2. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ СТУДЕНТОВ
В помощь студентам для выполнения лабораторных работ и контрольной работы предложены учебно-методические материалы. Ниже представлены материалы по разделу «Системы автоматической стабилизации и программного регулирования тока тяговых двигателей.», тема «Исследование динамических характеристик электрических аппаратов электропоезда ЭР9»
Цель работы: Освоение методики расчета динамических характеристик электрических аппаратов электропоезда.
В лабораторной работе необходимо рассчитать времена замыкания и размыкания контакторов КСП электропоезда ЭР9 и построить развертку.
Исходные данные для расчета выбираются из таблицы:
| Пара- метры | Последняя цифра шифра | |||||||||
| 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |
| tКСП, с | 21 | 22 | 23 | 24 | 25 | 26 | 27 | 28 | 29 | 30 |
Каждый электрический аппарат - устройство, имеющее один или несколько входов, на которые подается управляющее воздействие, в результате которого изменяется состояние одного или нескольких выходов.
Элементы аппарата, воспринимающие воздействия, будем называть входными, а выходы в зависимости от их назначения - элементами исполнения или связи.
В рассматриваемой системе управления входными элементами являются обмотки электропневматических вентилей, управляющих приводом тяговых аппаратов. Исключением является реле ускорения РУ, имеющее два входных элемента - обмотку в силовой цепи РУ-С и обмотку подъемной катушки РУ-П в цепи управления.
Элементами исполнения тяговых аппаратов являются их силовые контакты, обеспечивающие работу силовых цепей. Исполнительные элементы контроллера машиниста КМ и реле ускорения РУ включены в цепи управления.
К элементам связи относятся блокировки данного аппарата, обеспечивающие требуемый порядок работы аппаратов. Контроллер машиниста имеет механические связи между рукоятками (механические блокировки).
В структурных схемах систем автоматического регулирования [1, c. 62] электрические коммутационные аппараты изображаются в виде динамического звена с запаздыванием. Это связано с тем, что переключение выходных элементов аппарата происходит с некоторым запаздыванием относительно момента изменения управляющего воздействия на его входе. Поэтому динамическая характеристика аппарата представляет собой ступенчатую функцию, смещенную относительно начала координат на величину запаздывания. Величина запаздывания определяется длительностью электрических и механических переходных процессов в аппарате и зависит от ряда эксплуатационных факторов - напряжения питания цепей управления, давления сжатого воздуха, температуры и т.д.
Для расчетов в контрольной работе принимаются следующие значения времен запаздывания:
tру = 40 мс - время отпадания якоря РУ (время от момента достижения тока уставки до момента замыкания контактов РУ);
tру = 20 мс - время срабатывания РУ (время от момента замыкания контакта ПВ1 до момента размыкания контактов РУ);
tк =
 к = 80 мс - время включения и отключения контакторов с индивидуальным приводом (переходного, мостового, регулирования возбуждения).
к = 80 мс - время включения и отключения контакторов с индивидуальным приводом (переходного, мостового, регулирования возбуждения).Знак инверсии в обозначениях
ру , к обозначает размыкание контакта аппарата.Время переключения главного контроллера с позиции на позицию складывается из длительности ряда процессов, происходящих в аппарате и подчиняющихся определенному порядку - алгоритму.
Время переключения ГК отсчитывают с момента подачи воздействия (питания) на катушку очередного вентиля ВI или ВII через контакты ПВ1 или ПВ2 соответственно (рис. 3). Однако включение цепи питания катушки вентиля еще не означает его срабатывания.
Время срабатывания вентиля РК, как и любого электромагнитного устройства (например, реле), складывается из двух времен, а именно: времени трогания tтр = 130 мс, в течение которого ток в обмотке вентиля нарастает до значения тока срабатывания и начинается движение якоря, и времени движения tд = 20 мс якоря, который нажимает на клапан, открывающий доступ воздуха в цилиндр привода. Далее происходит заполнение воздухом цилиндра привода, которое завершается в течение tзв = 100 мс. После этого начинает вращаться выходной вал привода Решетова, на котором находятся кулачковые шайбы контакторных элементов ПВ1, ПВ2, ПВ3. Одновременно через зубчатую передачу начинает вращаться главный вал контроллера, который управляет работой силовых и блокировочных контактов.
Диаграмма, отражающая последовательность замыкания и размыкания силовых и блокировочных контактов при переключениях ГК с позиции на позицию (развертка ГК), приведена на рис. 1.
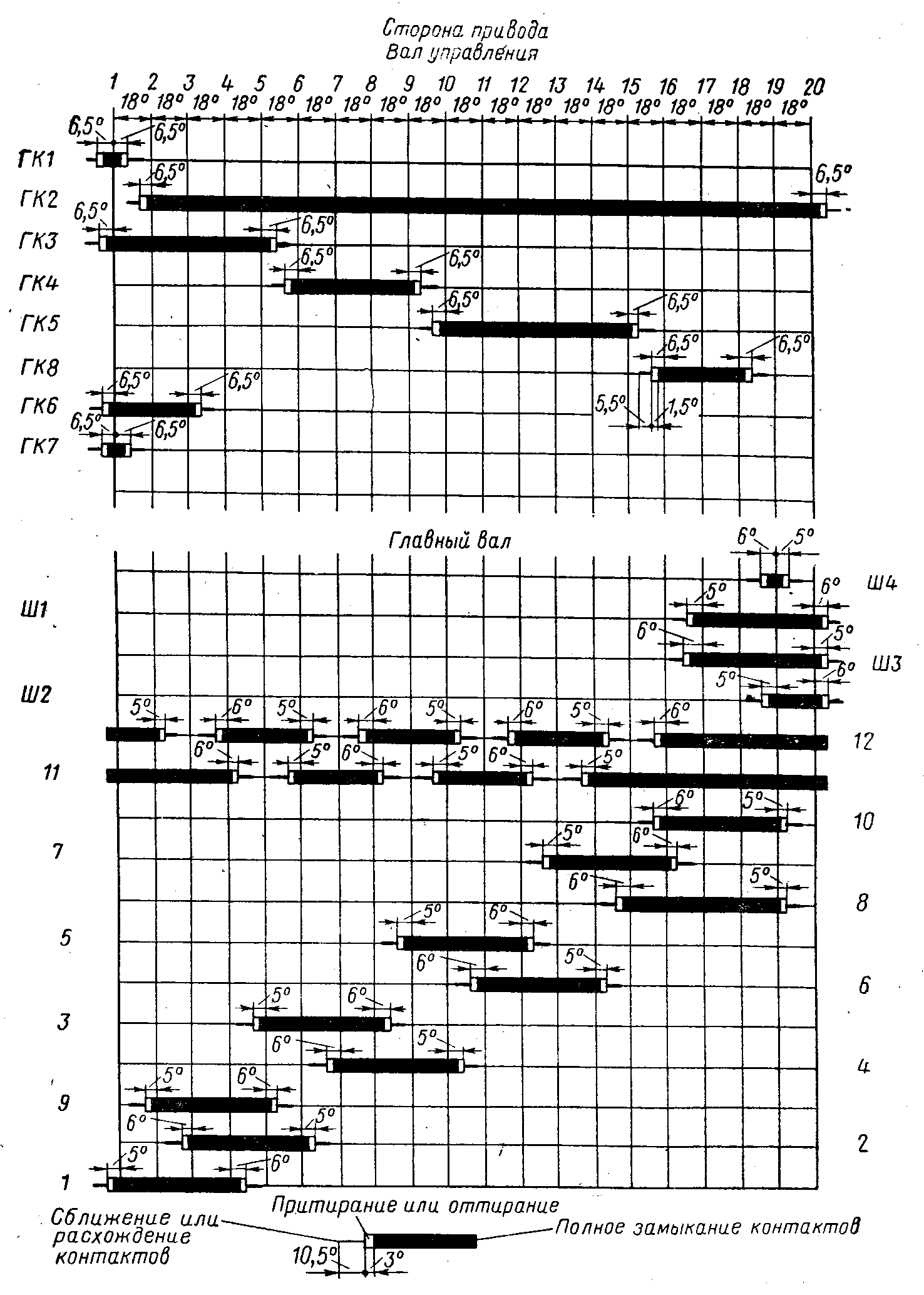
Р и с. 1. Развертка реостатного контроллера
Цифрами на диаграмме отмечены углы поворота в градусах выходного вала привода, отсчитанные от фиксированных позиций. Полный угол поворота вала при каждом переключении ГК составляет 18о. Для того, чтобы по заданным углам определить время от начала вращения вала до переключения контакта, нужно знать скорость вращения вала. Эту скорость будем считать постоянной. А численное ее значение определяется на на основе технических данных контроллера, а именно времени хронометрического вращения контроллера с 1-ой на 20-ю позицию при давлении 5 атм. Этот параметр нормируется в зависимости от модификации КСП, а в работе выбирается в зависимости от варианта по табл. Скорость вращения вала КСП можно определить по формуле
Время переключения главного контроллера, которое записывают в таблицу последовательности работы системы (табл. 5), складывается из времени подготовки tп = tтр + tд +tзв = 250 мс и времени вращения tвр до момента замыкания или размыкания силовых или блокировочных контактов, на различных тактах работы системы это время может быть разным.
Для определения времени вращения и последующего анализа необходимо построить график замыкания и размыкания силовых и блокировочных контактов ГК, а также контактов переключения вентилей (ПВ1, ПВ2 и ПВ3) в зависимости от времени. График следует построить для любых нескольких поворотов вала с позиции на позицию, где происходит замыкание силовых и блокировочных контактов. Форма данного графика должна соответствовать рис. 2 , только вместо углов нужно нанести времена вращения до замыкания и размыкания каждого контакта от фиксированной позиции.
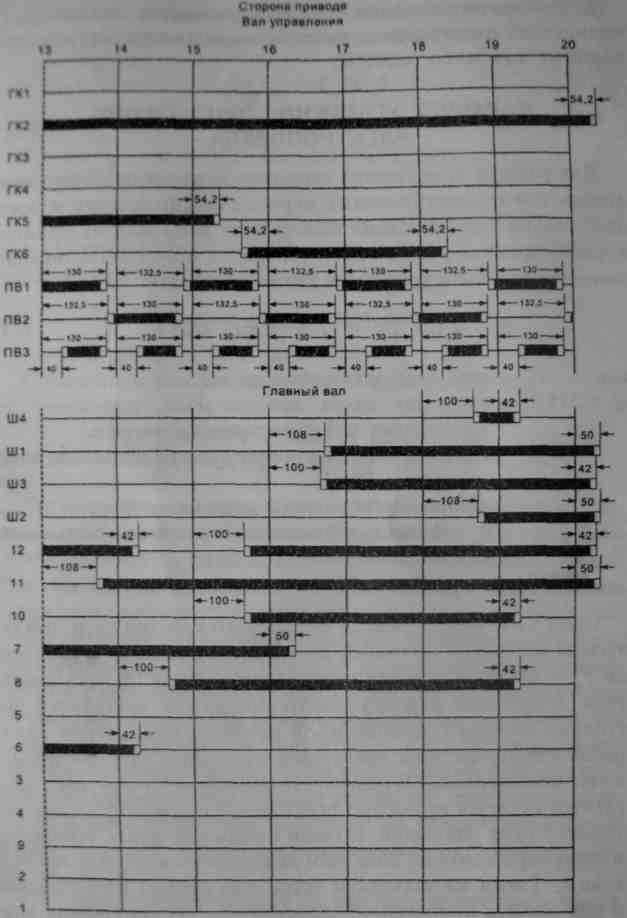
Рис. 2.
Время переключения электрических аппаратов записываются в колонку 4 табл. 5. При этом нужно следить за работой системы пуска по таблице алгоритма управления электропоездом табл. 2 и схемам рис. 2, 3 и 6. Необходимо помнить, что время переключения ГК в зависимости от исполнения может быть различным.
3. МЕТОДИЧЕСКИЕ УКАЗАНИЯ ДЛЯ ПРЕПОДАВАТЕЛЕЙ
- Изучив глубоко содержание учебной дисциплины, целесообразно разработать матрицу наиболее предпочтительных методов обучения и форм самостоятельной работы студентов, адекватных видам лекционных.
- Необходимо предусмотреть развитие форм самостоятельной работы, выводя студентов к завершению изучения учебной дисциплины на её высший уровень.
- Организуя самостоятельную работу, необходимо постоянно обучать студентов методам такой работы.
- Вузовская лекция – главное звено дидактического цикла обучения. Её цель – формирование у студентов ориентировочной основы для последующего усвоения материала методом самостоятельной работы. Содержание лекции должно отвечать следующим дидактическим требованиям:
- изложение материала от простого к сложному, от известного к неизвестному;
- логичность, четкость и ясность в изложении материала;
- возможность проблемного изложения, дискуссии, диалога с целью активизации деятельности студентов;
- опора смысловой части лекции на подлинные факты, события, явления, статистические данные;
- тесная связь теоретических положений и выводов с практикой и будущей профессиональной деятельностью студентов.
Преподаватель, читающий лекционные курсы в вузе, должен знать существующие в педагогической науке и используемые на практике варианты лекций, их дидактические и воспитывающие возможности, а также их методическое место в структуре процесса обучения.
- При изложении материала важно помнить, что почти половина информации на лекции передается через интонацию. В профессиональном общении исходить из того, что восприятие лекций студентами заочной формы обучения существенно отличается по готовности и умению от восприятия студентами очной формы.
- При проведении аттестации студентов важно всегда помнить, что систематичность, объективность, аргументированность – главные принципы, на которых основаны контроль и оценка знаний студентов. Проверка, контроль и оценка знаний студента, требуют учета его индивидуального стиля в осуществлении учебной деятельности. Знание критериев оценки знаний обязательно для преподавателя и студента.
4. МАТЕРИАЛЫ ТЕКУЩЕГО И ПРОМЕЖУТОЧНОГО КОНТРОЛЯ.
МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ
По дисциплине «Автоматические системы управления» предусмотрен промежуточный контроль в виде зачёта по лабораторным работам и текущий контроль в виде защиты контрольной работы. Порядок проведения текущего контроля и промежуточной аттестации строго соответствует Положению о проведении текущего контроля успеваемости и промежуточной аттестации студентов в университете. Ниже приводятся тесты, используемые для промежуточного контроля знаний.
4.1 Материалы текущего контроля
ТЕСТЫ
Вопрос №=1:
К какому виду операций относится следующая операция управления- получение начальной информации о цели управления?
Варианты ответов:
- кибернетическая, распорядительная.
- кибернетическая.
- распорядительная.
- энергетическая, исполнительная.
- энергетическая.
- исполнительная.
- кибернетическая, энергетическая.
- кибернетическая, исполнительная.
- распорядительная, энергетическая.
- распорядительная, исполнительная.
Вопрос №=2:
К какому виду операций относится следующая операция управления- сбор рабочей информации о состоянии объекта управления и о внешних воздействиях?
Варианты ответов:
- кибернетическая, распорядительная.
- кибернетическая.
- распорядительная.
- энергетическая, исполнительная.
- энергетическая.
- исполнительная.
- кибернетическая, энергетическая.
- кибернетическая, исполнительная.
- распорядительная, энергетическая.
- распорядительная исполнительная.
Вопрос №=3:
К какому виду операций относится следующая операция управления- обработка начальной и рабочей информации, принятие решения о необходимости воздействия на управляемый объект?
Варианты ответов:
- кибернетическая, распорядительная.
- кибернетическая.
- распорядительная.
- энергетическая, исполнительная.
- энергетическая.
- исполнительная.
- кибернетическая, энергетическая.
- кибернетическая, исполнительная.
- распорядительная, энергетическая.
- распорядительная, исполнительная.
Вопрос №=4:
К какому виду операций относится следующая операция управления- исполнение принятого решения?
Варианты ответов:
энергетическая, исполнительная.
- энергетическая.
- исполнительная.
- кибернетическая, распорядительная.
- кибернетическая.
- распорядительная.
- кибернетическая, энергетическая.
- кибернетическая, исполнительная.
- распорядительная, энергетическая.
- распорядительная, исполнительная.
Вопрос №=5:
Какие из перечисленных операций относятся к кибернетическим:
- Получение начальной информации о цели управления.
- Сбор рабочей информации о состоянии объекта управления и о внешних воздействиях.
- Обработка начальной и рабочей информации, принятие решения о необходимости воздействия на управляемый объект.
- Исполнение принятого решения.
Варианты ответов:
- п.п. 1,2,3.
- п.1.
- п.п. 1,2.
- п.2.
- п.п. 2,3.
- п. 3.
- п.п. 3,4.
- п. 4.
- п.п. 2,3,4.
- п.п. 2,4.
- п.п.1,3,4.
- п.п. 1,2,4.
Вопрос №=6:
Какие из перечисленных операций относятся к энергетическим:
Получение начальной информации о цели управления.
- Сбор рабочей информации о состоянии объекта управления и о внешних воздействиях.
- Обработка начальной и рабочей информации, принятие решения о необходимости воздействия на управляемый объект.
- Исполнение принятого решения.
Варианты ответов:
- п.4.
- п.п. 3,4.
- п.п. 2,3,4.
- п.п. 2,4.
- п.п. 1,3,4.
- п.п. 1,2,4.
- п.п. 1,2,3.
- п. 1.
- п.п. 1,2.
- п. 2.
- п.п. 2,3.
- п.3.
Вопрос №=7:
Какие из перечисленных операций относятся к распорядительным:
- Получение начальной информации о цели управления.
- Сбор рабочей информации о состоянии объекта управления и о внешних воздействиях.
- Обработка начальной и рабочей информации, принятие решения о необходимости воздействия на управляемый объект.
- Исполнение принятого решения.
Варианты ответов:
- п.п. 1,2,3.
- п.1.
- п.п. 1,2.
- п.2.
- п.п. 2,3.
- п. 3.
- п.п. 3,4.
- п. 4.
- п.п. 2,3,4.
- п.п. 2,4.
- п.п.1,3,4.
- п.п. 1,2,4.
Вопрос №=8:
Какие из перечисленных операций относятся к распорядительным: Варианты ответов:
- п.4.
- п.п. 3,4.
- п.п. 2,3,4.
- п.п. 2,4.
- п.п. 1,3,4.
- п.п. 1,2,4.
- п.п. 1,2,3.
- п. 1.
- п.п. 1,2.
- п. 2.
- п.п. 2,3.
- п.3.
Вопрос №=9:
Этот уровень управления электровозом сводится к тому, что машинист оценивает пройденный путь, затраченное время и достигнутую скорость. сопоставляет это с длиной перегона, ограничениями скоростями и заданным временем прибытия на станцию. Учитывает уровень напряжения в контактной сети и принимает решение об изменении режима работы ТЭД?
Варианты ответов:
- неавтоматическое управление.
- порядково-временное связывания.
- функциональное связывание.
- автоматическое регулирование.
- автоматическое управление.
Вопрос №=10:
Этот уровень управления обеспечивает последовательность выполнения процессов во времени?
Варианты ответов:
- порядково-временное связывания.
- неавтоматическое управление.
- функциональное связывание.
- автоматическое регулирование.
- автоматическое управление.
Вопрос №=11:
Этот уровень управления состоит в том. Что начало (или) конец какого-либо процесса определяется значением некоторого показателя. Характеризующего другой процесс?
Варианты ответов:
- функциональное связывание.
- автоматическое регулирование.
- автоматическое управление.
- неавтоматическое управление.
- порядково-временное связывания
Вопрос №=12:
Этот уровень управления обеспечивает изменение регулируемой величины по заданному закону при помощи автоматического регулятора, последовательность действий которого определяется человеком?
Варианты ответов:
- автоматическое регулирование.
- автоматическое управление.
- неавтоматическое управление.
- порядково-временное связывания.
- функциональное связывание.
Вопрос №=13:
Этот уровень управления предназначен для автоматизации ведения поезда. Включая пуск и разгон, выбор режима ведения на перегонах, торможение, с целью повышения точности выполнения графика движения?
Варианты ответов:
- автоматическое управление.
- автоматическое регулирование.
- функциональное связывание.
- порядково-временное связывания
- неавтоматическое управление.
Вопрос №=14:
Схема управления групповым переключателем для изменения группировок ТЭД ЭПС или переключения секций трансформатора служит примером?
Варианты ответов:
- порядково-временное связывания
- функциональное связывание.
- неавтоматическое управление.
- автоматическое регулирование.
- автоматическое управление.
Вопрос №=15:
Система защиты от перегрузок и коротких замыканий служит примером?
Варианты ответов:
функциональное связывание.
- порядково-временное связывания
- неавтоматическое управление.
- автоматическое управление.
- автоматическое регулирование.
Вопрос №=16:
Система регулирования угла запаса выпрямительно-инверторного преобразователя служит примером?
Варианты ответов:
- автоматическое регулирование
- автоматическое управление.
- неавтоматическое управление.
- порядково-временное связывания
- функциональное связывание.