
Систематический курс 11 класс Для классов гуманитарного профиля Допущено
| Вид материала | Учебник |
СодержаниеМодель самоуправления Предопределен ли исход самоорганизующегося процесса и можно ли в принципе предугадать итоговый результат? АВ, либо устойчивая пара АС |
- Элективный курс по химии 10-11 класс для профильного обучения. «Введение в биохимию, 103.1kb.
- Программа курса химии для школ и классов гуманитарного профиля (третья ступень обучения), 99.49kb.
- Элективный курс «русская речь: развитие речи», 57.53kb.
- Программа дополнительного образования, 78.63kb.
- Программа элективного курса "Издательское дело", 73.93kb.
- Систематический курс (в трёх томах) Том, 7018.51kb.
- Зимина Ирина Викторовна 2010 год пояснительная записка, 94.37kb.
- Желябовская Татьяна Олеговна, учитель русского языка и литературы моу сош №1 города, 61.66kb.
- Курс лекций по организации производства на предприятиях отрасли, 1731.03kb.
- Пояснительная записка к программе «Страноведение. Великобритания» для учащихся 9-х, 65.3kb.
щей среды. Терморегуляция осуществляется на основе принципа обратной связи. Если температура тела снижается, то выработка тепла возрастает, например, за счет дрожи. Уменьшаются теплопотери, например, путем уменьшения циркуляции крови в сосудах, лежащих непосредственно под кожей. Если температура тела повышается, то возрастает отдача тепла, например, в виде пота.
Пример. Как известно, в образовании этноса существенную роль играет принцип комплиментарности, заключающийся в неосознанной симпатии к одним людям и антипатии к другим. Например, викинги не брали в поход тех, кого считали ненадежными, трусливыми, сварливыми или недостаточно свирепыми. Все это было очень важно, ибо при военных действиях на каждого человека должна была пасть максимальная нагрузка и ответственность за свою жизнь и жизнь товарищей.
Эти и другие примеры наводят на мысль, что управление в ряде случаев может осуществляться без присутствия субъекта управления — автономной (не относящейся к объекту управления) управляющей системы. В этом случае возникают вопросы:
- Каков механизм самоуправления, в чем его отличие от «традиционного» управления?
- Каким образом задается и поддерживается цель управления, коль скоро в этом не участвует субъект?
Механизм самоуправления существенным образом отличается от механизма управления, представленного на схеме из § 3.1. При самоуправлении элементы системы воздействуют друг на друга, стремясь стать субъектами управления. При этом возможны следующие ситуации:
- воздействие одного из элементов становится доминирующим и он становится «обычным» субъектом управления;
- элементы уничтожают друг друга и, возможно, всю систему;
- цели, преследуемые отдельными элементами системы, корректируются и наступает определенное динамическое равновесие.
Анализ последней ситуации приводит к мысли, что при самоуправлении глобальные, перспективные, стратегические цели могут быть поставлены, но они не могут быть реализованы, поскольку длительное «сохранение» таких целей может «отслеживаться» только управляющей системой (субъектом управления). Тогда цели функционирования от-
дельных элементов системы подчиняются общей цели. В процессе самоуправления, при достижении равновесия, как правило, происходит понижения уровня целей до тактических, иногда даже - сиюминутных.
Пример Предстаете себе компанию друзей, которая решила вместе провести свободное время. До этого решения у каждого могли быть свои цели. Одному хотелось пойти в спортзал, другому — прочитать интересную статью в новом журнале и так далее. Как будет развиваться ситуация в том случае, когда в компании есть признанный лидер, и в том, когда такового нет, вы можете предположить сами.
Следует отметить, что управление отличается от взаимодействия тем, что в процессе управления реализуются какие-либо цели. В этом смысле притяжение планет к Солнцу является взаимодействием, а не управлением, поскольку здесь нет явно выделенной цели. С другой стороны, повышение пульса у бегущего человека трудно объяснить каким-либо прямым взаимодействием, но зато здесь можно выделить определенную цель — сохранение жизни.
В случае отсутствия субъекта управления будет правильнее говорить не о «достижении цели», а о «преследовании цели», поскольку преследовать цель можно как осознанно (при наличие субъекта), так и неосознанно (когда речь идет о самоуправлении). В дальнейшем, во избежании путаницы, мы будем говорить о достижении цели только по отношению к субъекту управления, а преследование цели — по отношению к самоуправлению.
Таким образом, процесс самоуправления описывается иной моделью, чем процесс управления, в котором участвует субъект. Основные моменты формализации, лежащие в основе модели самоуправления, следующие:
- элементы объекта управления оказывают управляющие воздействия на другие элементы объекта, то есть распределяют между собой функции субъекта управления;
- в процессе самоуправления цели элементов (как субъектов управления) могут быть скорректированы;
- управляющие воздействия отдельного элемента определяются той информационной моделью всей системы управления, которая у него сложилась;
- информационные модели у различных элементов могут не совпадать друг с другом.
Общая схема самоуправляющейся системы изображена на рис. 3.4.1.
Рис. 3.4.1
Общая схема
самоуправляемой
системы
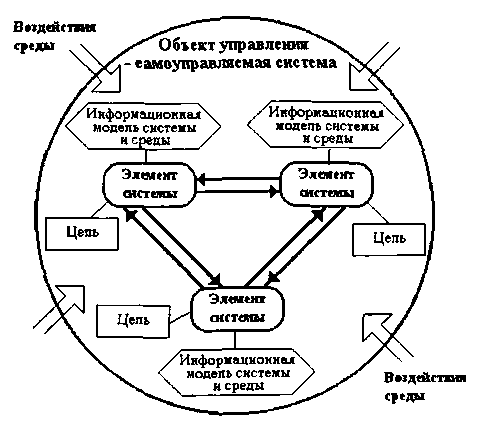
Примечание. Механизм самоуправления, согласно Н. Винеру, может быть объяснен на основе понятия информации, циркулирующей в системе. В данной схеме понятие информации конкретизировано до понятия информационной модели: в основе механизма самоуправления лежит информационная модель, в соответствии с которой живое существо или созданный человеком механизм осуществляет взаимодействие с системой.
Пример. В человеческом обществе понятие «преследование цели» близко к понятию мотива. Существуют различные психологический модели человеческих мотивов. По Адаму Смиту, проводившему исследования в начале XIX века на английских предприятиях, человек всегда стремится улучшить свое экономическое положение. По Лоуренсу и Ларошу, люди стремятся повторять то поведение, которое уже приводило к ожидаемому результату.
По Маслоу, человек стремится удовлетворить потребности в строгой иерархической последовательности: физиологические потребности —> потребности безопасности и защищенности —> социальные потребности —> потребности уважения —> потребности самовыражения. По МакКеланду, потребности имеют три основных составляющих: власть, успех и причастность. По Вруму, мотивация складывается из достижения ожидаемых результатов, вознаграждения, ценности последнего.
 Существует и другая, не менее обоснованная точка зрения на то, является ли субъект необходимым компонентом управления. Заключается она в том, что самоуправляющаяся система является не более чем абстрактной схемой, более или менее приближенной к действительности. В реальности же во всяких самоуправляющихся системах можно выявить субъект управления, возможно, скрытый.
Существует и другая, не менее обоснованная точка зрения на то, является ли субъект необходимым компонентом управления. Заключается она в том, что самоуправляющаяся система является не более чем абстрактной схемой, более или менее приближенной к действительности. В реальности же во всяких самоуправляющихся системах можно выявить субъект управления, возможно, скрытый.Пример. Считается, что рынок является самоуправляющейся системой. Послушаем, что говорит по этому поводу Н. Винер. «...Во многих странах распространено мнение, признанное в Соединенных штатах официальным догматом, что свободная конкуренция является гомеостатическим процессом, то есть что на вольном рынке эгоизм торговцев, каждый из которых стремиться продать как можно дороже и купить как можно дешевле, в конце концов приведет к устойчивой динамике цен и будет способствовать наибольшему общественному благу. Это мнение связано с очень «утешительным» воззрением, что частный предприниматель, стремясь обеспечить свою собственную выгоду, является в некотором роде общественным благодетелем и поэтому заслуживает больших наград, которыми общество его осыпает. К сожалению, факты говорят против этой простодушной теории. Рынок — игра, находящая свое подобие в семейной игре под названием «Монополия». Она строго подчинена теории игр, которую разработали фон Нейман и Моргенш-терн...Это рыночная игра, в которую играют вполне разумные, но совершенно беззастенчивые дельцы... Побуждаемые своей собственной алчностью, отдельные игроки образуют коалиции; но эти коалиции обычно не устанавливаются каким-нибудь одним определенным образом и обычно кончаются столпотворением измен, ренегатства и обманов. Это точная картина высшей деловой жизни и тесно связанной с ней политической, дипломатической и военной жизни. Даже самого блестящего маклера ждет разорение. Но, допустим, что маклерам это надоело и они согласились жить в мире между собой. Тогда награда достанется тому, кто, выбрав удачный момент, нарушит соглашение и предаст своих партнеров...» (Н.Винер. Кибернетика/ Русск. перевод. М.: Наука, 1983, с. 240-241). В реальных системах, близких к самоуправляющимся, наблюдаются явления, делающие их крайне неустойчивыми. Уже давно замечено, что значения многих параметров самоуправляющихся систем подвержены более или менее значительным колебаниям, циклам.
Пример. В развитии экономики выявлены различные циклы, состоящие из периода подъема и периода спада, названные именами их первооткрывателей-экономистов. Выстроив циклы по увеличению длительности, заметим, что их периоды примерно удваиваются: цикл Китчина (3-4 года), цикл Жюглара (6-8 лет), цикл Лабруса (10-12 лет), цикл Кузнеца (20-24 года), цикл Кондратьева (40-60 лет) и, наконец, вековая тенденция. Применительно к Европе отмечены четыре последовательных цикла Кондратьева: [1790 (1810-1817) 1844-1855], [1850 (1870-1875) 1890-1896], [1890 (1914-1920) 1940], [1940 (1969-1972) 1980]. Первая и последняя даты каждого из этих циклов отмечают начало подъема и окончание спада. Дата в круглых скобках отмечает кульминационный момент, точку кризиса, где начинается нисходящая ветвь цикла (разумеется, приближенно). Аналогично отмечены четыре последовательных вековых цикла: [1250 (1350) 1507-1510], [1510 (1650) 1733-1743], [1740 (1817) 1896], [1896 (1974?) ...]. Как и у любого другого цикла, определение исходной точки оказывается довольно приблизительным, принимая во внимание плавные очертания волны. От года к году вековая тенденция едва ощутима, но как только одно столетие сменяет другое, она оказывается важнейшим действующим лицом.
Поскольку всякая система стремится к устойчивому состоянию, неустойчивое состояние самоуправляющейся системы может разрешиться следующим образом:
- переходом к традиционной системе управления, рассмотренной в § 3.1;
- разрушением системы;
- переходом к принципиально новым (для даной системы) формам управления.
Третья возможность будет подробно рассмотрена в следующих параграфах. Что касается первых двух возможностей, то они исследованы достаточно подробно.
Пример. В художественной культуре существуют очень яркие образы разрушения самоуправляющихся систем. Одним из них является роман-антиутопия лауреата нобелевской премии У. Голдинга «Повелитель мух» и снятый по нему классический фильм. В нем показано, как сотня нормальных детей, попавших без взрослых на тропический остров, решает воспроизвести политический строй «как у взрослых» — с выборами парламента, президента, то есть через создание самоуправляемой системы. В конечном итоге эта система рухнула и образовалась жесткая диктатура.
Другим, столь же ярким примером является известный фильм Ф. Феллини «Репетиция оркестра». Восстав против дирижера, оркестранты создали общий хаос, который привел к разрушению и гибели. Только вернувшись к музыке и вспомнив про дирижера, они спасли себя.

Самоуправление — это способ управления объектом, когда нет автономной от него управляющей системы.
Цель самоуправляющейся системы формируется внутри нее, а не задается извне.
Управление может осуществляться без управляющей системы — субъекта управления, независимого от управляемого объекта, в следующих случаях:
• один из элементов объекта управления оказывает управ
ляющее воздействие на другие элементы, то есть берет на
себя функции субъекта управления;
' • в процессе самоуправления цели отдельных элементов (как субъектов управления) корректируются в процессе взаимодействия с другими элементами.
В последнем случае уровень целей, стоящих перед объектом в целом, понижается.
Механизм самоуправления, согласно Н. Винеру, может быть объяснен на основе понятия обмена информацией, циркулирующей в системе, между элементами системы.
В основе механизма самоуправления лежат информационные модели, на основе которых живое существо или созданный человеком механизм (как элемент системы) осуществляет взаимодействие с системой в целом и в ее рамках с внешней средой.
Модель самоуправления основывается на следующих предположениях:
• элементы объекта управления оказывают управляющие
воздействия на другие элементы, то есть распределяют
между собой функции субъекта управления;
• у каждого элемента системы есть индивидуальные цель и
модель ситуации, причем информационные модели у раз
личных элементов могут не совпадать друг с другом.
- в процессе самоуправления цели элементов (как субъектов управления) могут быть скорректированы и, как правило, корректируются в процессе взаимодействия;
- управляющие воздействия отдельного элемента определяются той информационной моделью всей системы управления, которая у него сложилась.
В реальных системах, близких к самоуправляющимся, значения многих параметров подвержены более или менее значительным колебаниям и периодически возникающим сотояниям неустойчивости.
Поскольку всякая система стремится к стабильности, неустойчивое состояние самоуправляющейся системы может привести к:
- переходу к традиционной системе управления;
- разрушению системы;
- переходу к принципиально новым (для данной системы) формам управления.
Задание 1
Компьютер является очень сложной информационной системой, включающей в себя различные подсистемы. Какие информационные подсистемы компьютера можно отнести к самоуправляющимся? Ответ обоснуйте.
Задание 2
Приведите примеры самоуправляющихся систем в природе, технике, обществе.
Задание 3
Какие из следующих систем являются самоуправляющимися:
а) живой организм;
б) автопилот самолета;
в) робот;
г) компьютер;
д) человеческое общество?
Задание 4
Сформулируйте основные отличия управляемых и самоуправляющихся систем.
Задание 5
В разных ситуациях коллектив вашего класса можно рассматривать как управляемую или как самоуправляющуюся систему. Определите для этих двух случаев, в чем разница между целями, которые преследуются, и целями, которые могут быть достигнуты. Приведите примеры целей того и другого типа. Какое «функционирование» данной системы — управляемое или самоуправляющееся — более эффективно для достижения каждой из предложенных вами целей?
Задание 6
Педставьте с помощью какой-нибудь программы деловой графики (например, Мастера диаграмм) данные, приведенные в примере об экономических циклах. Проанализируйте, совпадают ли периоды экономического спада с известными вам историческими событиями.

Как известно, в живой природе и в человеческом обществе многие процессы имеют циклическую природу. Например, солнечная активность имеет период колебания в 11 лет. Иногда эти циклы связывают между собой, например, периодичность социальных катаклизмов объясняются периодичностью некоторых астрономических явлений. Правомерно ли подобное сопоставление?
В пользу идеи о самоорганизации материи (как, впрочем, и в пользу ее отрицания) можно привести множество примеров.
Наглядно процесс самоорганизации можно продемонстрировать с помощью так называемых «клеточных автоматов», наиболее известным примером которых является игра «Жизнь», программу которой вы можете составить и сами.
Представим себе поле, разбитое на клетки. Для простоты возьмем поле небольшого размера, например 5x5 клеток.
Предположим, что каждая клетка может находиться в одном из двух состояний: быть закрашенной или нет.
Пусть в начальный момент времени половина клеток была закрашена, причем эти клетки случайным образом распределены по всему полю (рис. 3.4.2 о). Предположим далее, что в некоторый момент времени клетка изменяет свое состояние на противоположное, если большинство клеток из ее непосредственного окружения составляют клетки альтернативного типа и, напротив, она остается такой же какой и была, если в ее окружении преобладают, или даже не составляют меньшинства, клетки того же типа, что и у нее. Повторяя этот процесс снова и снова, можно приди к некоторой структуре, которая уже не будет подвергаться дальнейшим изменениям. В данном примере, это уже происходит
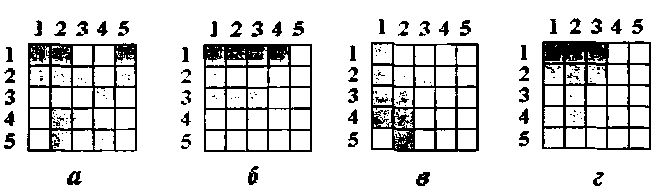 в четвертом «поколении» клеток (рис. 3.4.2 г).
в четвертом «поколении» клеток (рис. 3.4.2 г).Рис. 3.4.2. Пример развития колонии случайно распределенных клеток в игре «Жизнь
Происходит это потому, что клетки в ходе игры «информируют» друг друга о своем состоянии и реагируют на эту информацию в соответствие с установленными правилами.
В связи с эти возникает чрезвычайно важный вопрос. Предопределен ли исход самоорганизующегося процесса и можно ли в принципе предугадать итоговый результат?
В самоорганизующихся системах, особенно на ранних этапах эволюции, возникают ситуации неустойчивого состояния системы, от которых развитие может пойти в различных направлениях в зависимости от случайных факторов.
Например, в приведенной выше модели из закрашенных и не закрашенных клеток можно выделить объективную закономерность — разноименные клетки «притягиваются» друг к другу. Однако, даже несмотря на объективный характер этой закономерности в каждый конкретный момент времени существует альтернатива притяжения клеток А и Б, либо, скажем, клеток А и С. В результате образуется либо
устойчивая пара АВ, либо устойчивая пара АС, что, в свою очередь, может привести к развитию системы по одной из двух непересекающихся линий.
В этом плане поучительным является анализ многих исторических событий: являются ли они исторически неизбежными или определяются действиями случайных (или целенаправленных) сил, приложенных к системе в точке неустойчивого состояния.
Как правило, «исторически неизбежные» события всегда имеют альтернативу, и какая из них осуществится — во многом дело случая или личностного фактора. Человек с волевыми качествами может самым решительным образом влиять на дальнейшее развитие системы, независимо от имеющихся в его распоряжении средств, если его усилия будут приложены в нужном месте и в нужное время.
§ 3.5. Устойчивость систем с позиций управления

В нашем восприятии мира представления об устойчивости носят основополагающий характер. Человек может изучать и работать с теми объектами, которые ощутимо сохраняются во времени или повторяются. Без наличия определенной устойчивости не может существовать сознание, да и вообще живой организм.
Как вы знаете, любой объект можно рассматривать с точки зрения его внешнего вида, структуры и поведения. Оказывается, именно структура объекта в наибольшей степени «отвечает» за его устойчивость. Любой объект можно рассматривать как систему, а потому необходимо определить, что же такое устойчивость систем.
Считается, что данная система устойчива, или структурно устойчива, если при достаточно малых изменениях в ее структуре поведение системы становится в некотором смысле аналогичным поведению исходной системы. Разумеется, в каждом конкретном случае мы должны точно определить, что подразумевается под выражением «достаточно малые» и «аналогично».
Пример. Солнечная система, является устойчивой системой. Эта устойчивость объясняется доминирующим действием Солнца, подавляющим взаимное притяжение планет. Вместе с тем, это действие позволяет планетам двигаться. Если бы притяжение было бы очень сильным, планеты бы просто бы упали на Солнце.
Предположим теперь, что мы имеем систему притягивающихся друг к другу планет без учета притяжения Солнца. В простейшем случае, когда у нас только три планеты, мы приходим к знаменитой и очень сложной задаче «трех тел»: как будет вести себя система из трех тел, между которыми существует сила притяжения, обратно пропорциональная квадрату расстояния между ними? Оказывается — очень непросто, и до конца эта задача не решена до сих пор.
Пример. Другим астрономическим примером служит внутренняя устойчивость звезды. Она обеспечивается взаимодействием двух противоположных процессов: сжатия вещества под влиянием гравитации и его расширения за счет кинетической энергии, приобретенной в ядерных реакциях. Сжатие повышает плотность и температуру, что ведет к усилению термоядерной реакции. Полученная при этом кинетическая энергия вещества ведет к расширению вещества, а, значит, к понижению температуры и плотности. Тогда уменьшается интенсивность термоядерных реакций и гравитационные силы сжимают вещество. Устойчивость звезды реализуется в виде сложных колебаний.
Пример. Для исследования проблем устойчивости известный специалист по кибернетике У.-Р. Эшби создал модель сложной системы — гомеостат, состоящей всего из четырех блоков, связанных между собой определенными связями (рис. 3.5.1). В каждом из них имелся поворачивающийся под действием электрического тока магнит, положение которого влияло на величину электрического тока, подаваемого на другие блоки. Когда включали эту систему, все магниты начинали поворачиваться под действием токов от других блоков. Эти движения изменяли величину протекающего через магниты тока, который в свою очередь изменял движение магнитов. При этом могло быть два случая: либо после некоторого переходного процесса все электромагниты оказались в некотором устойчивом состоянии и движение прекращалось, либо система не находила устойчивого состояния и один из электромагнитов выходил за пределы нормального отклонения. В схеме в этом случае происходили случайные переключения, и поиски равновесия возоб-
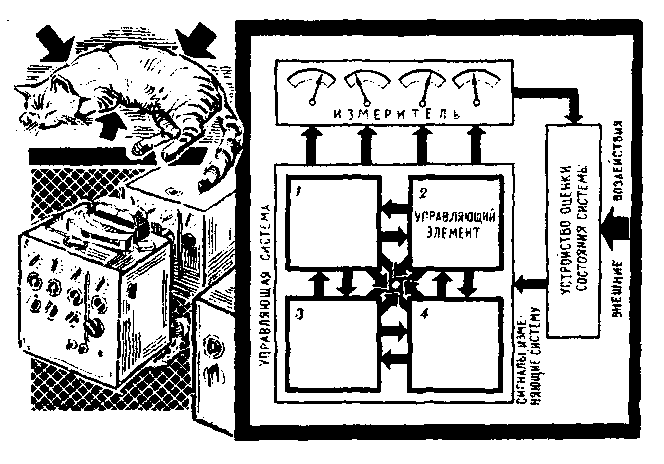
Рис. 3.5.1. Схема гомеостата У.-Р. Эшби
новлялись. В конце концов после нескольких случайных переключений система самостоятельно находила состояние равновесия.
Различные внешние возмущающие воздействия на гоме-остат — перестановки упоров, изменение связей, небольшие поломки — не нарушали его способности переходить в устойчивое состояние.
Интересна оценка Н. Винера результатов этих экспериментов: «Я полагаю, что блестящая идея Эшби о целеустремленном механизме, добивающемся своих целей через процесс научения, является не только одним из крупных философских достижений современности, но также ведет к весьма полезным техническим выводам в решении задач автоматизации. Мы не только можем придавать целевую направленность машине, но в подавляющем большинстве случаев машина, сконструированная для того, чтобы избегать аварийных ситуаций, будет отыскиввать цели, которые она может осуществить».
При изучении устойчивости динамических систем очень важным является понятие аттрактора (to attract — притягивать), т. е. такого состояния динамической системы, к которому она стремится, «притягивается». Это состояние может быть описано множеством, которое также называют аттрактором.
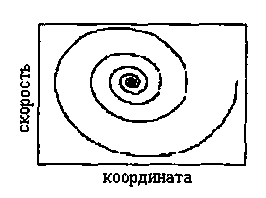
Пример. Простым примером динамической системы, иллюстрирующей понятие аттрактора, является маятник. Обычный движущийся маятник под действием сил трения в конце концов останавливается в точке, которая и есть в данном случае аттрактор, поскольку именно эта точка в процессе движения «притянула к себе» маятник. Если описать движение маятника в прямоугольной системе координат, где по одной оси откладывается угол отклонения маятника от вертикали, а по другой — скорость изменения этого угла (в математике это называется фазовой плоскостью), то получим постепенное приближение маятника к аттрактору — началу координат (рис. 3.5.2).
Рис. 3.5.2
Движение обычного маятника
-г
::>°л. ■■->■
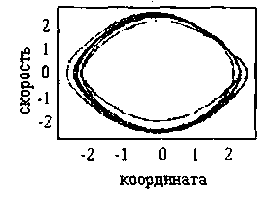
Пример. По другому ведет себя динамическая система, состоящая из часового механизма, маятника и груза на цепочке. Если раскачать маятник сильным толчком, то он начнет сильно раскачиваться, замедляясь затем до некоторого стабильного режима колебаний. На фазовой кривой этот режим изображается окружностью, которая в данном случае и является аттрактором (рис. 3.5.3).
Рис. 3.5.3
Движение маятника часов
Управляющие воздействия должны, с одной стороны, обеспечивать достижение поставленной цели, с другой — не нарушать относительной устойчивости системы, если система является изначально устойчивой. Если же напротив, система изначально является неустойчивой (например, государство в момент кризиса), то управление с необходимостью должно привести систему к относительно устойчивому состоянию.
И системы, управляемые субъектом, и самоуправляющиеся системы могут быть устойчивыми или неустойчивыми.
Устойчивость системы управления может быть достигнута разными очень разными путями, иногда очень простыми и остроумными.
Пример. Известно, что на военном флоте с давних времен устные команды и распоряжения, дословно повторяются теми, к кому они относятся. Например, офицер командует: «поднять якорь», а матрос отвечает «есть поднять якорь». Этим простым приемом достигается значительная надёжность в управлении сложной системой — кораблем. При шуме ветра и волн матрос мог неправильно понять приказ, и его дублирование позволяло офицеру это проконтролировать.
По-видимому, самым эффективным средством повышения устойчивости управляемых и самоуправляющихся систем — это усиление влияния субъекта управления.
Пример. Как известно, в 1929 году в США и многих странах Западной Европы разразился глубочайший экономический кризис, получивший название Великой депрессии. Решающая роль в его преодолении принадлежала государству (субъекту управления). Например, военные расходы правительства США в 1941 году увеличились на 105% (по сравнению с 1940 г.), в 1942 году - на 175%, а в 1943 году еще на 50%. В 1944 году расходы правительства США даже с поправкой на рост цен были в 6,5 раза выше, чем в 1940 году. Именно военные расходы встряхнули экономику США и вывели ее из трясины Великой депрессии.
Если цели управления и управляющие воздействия субъекта управления хорошо согласованы, состояния неустойчивости системы практически не возникают, поскольку субъект, как правило, с помощью обратных связей оперативно реагирует на первые признаки неустойчивости и стабилизирует систему. Иное дело самоуправляющаяся система или система, в которой субъект управления фактически не выполняет своих управленческих функций. В таких системах часто возникают кризисные ситуации. С точки зрения традиционной схемы управления эти состояния крайне нежелательны. Но существует и такая точка зрения, что в кризисах заложен эффективный инструмент управления.
Фундаментальной значение в этом случае приобретают так называемые точки бифуркации (от французского bifurcation — раздвоение), то есть такие точки, в которых система становится неустойчивой и ее дальнейшее развитие возможно в разных направлениях в зависимости от случайных факторов.
Пример. Пусть к балке, изображенной на рисунке 3.5.4. приложена переменная сила F. Какое-то время балка находится в устойчивом состоянии, а затем, при некотором значении F0 прогибается. При этом, в какую сторону она прогнется — вправо или влево — зависит от случайных факторов. Значение силы F0 и определяет точку бифуркации. Возможное развитие системы показано на графике.
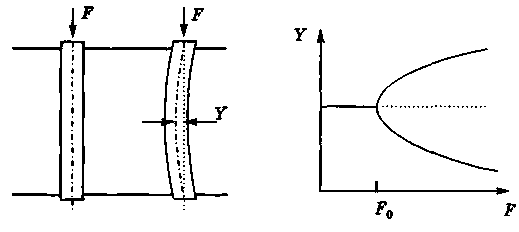
Рис. 3.5.4. Прогибание балки под воздействием силы
Как свойство точек бифуркации используется в процессе управления? Предположим, что существует субъект, который поставил перед собой цель прогнуть балку в определенную сторону.
Будем считать, что балка является достаточно прочной и прямое управляющее воздействие, необходимое для изгибания балки является очень большим и, возможно, недостижимым для субъекта.
Однако, зная свойства точек бифуркации, можно кардинально поменять стратегию управления. Можно, используя тот факт, что на балку действует сила F, в точке бифуркации FQ, подействовать на нее малой силой и добиться желаемого результата.
Пример. Управление с использованием так называемых малых резонансных воздействий в точках бифуркации известно очень давно. Как свидетельствует история, рядом с властным лицом, не отличающимся умом или сдержанностью, всегда находится некто, кто в критические моменты (то есть точки бифуркации) дает ему советы, направляя его волю в определенную сторону. История сохранила для нас имена многих таких людей: шут Шико при французском короле Карле IX (по версии А. Дюма), Э. И. Бирон при русской императрице Анне Иоанновне, философ Сенека при римском императоре Нероне и др.
Управление через малые резонансные воздействия в неустойчивых ситуациях может быть более эффективным, чем директивное (авторитарное) и демократическое (коллективное) управление. В социальных системах тому немало подтверждений. Возможно, поиски возможности реализации такого рода управления в технических системах приведут к интересным открытиям.

Система называется структурно устойчивой, если при достаточно малых изменениях в ее структуре поведение системы становится в некотором смысле аналогичным поведению исходной системы.
При изучении устойчивости динамической системы очень важным является понятие аттрактора — такого состояния системы, к которому она стремится, «притягивается». Это состояние может быть описано множеством, которое также называют аттрактором.
Понятие аттрактора является обобщением понятия равновесия.
Фундаментальное значение в изучении поведения системы и ее устойчивости имеют точки бифуркации, то есть такие точки, в которых система становится неустойчивой и направление ее дальнейшего развития зависит от случайных факторов.

Задание 1
Приведите примеры устойчивых и неустойчивых систем, известных вам из курсов физики, химии, биологии.
Задание 2
Определите, какие факторы (внутренние и внешние) могут влиять на устойчивость системы. Может ли управление быть одним из таких факторов?
Задание 3
Разработайте схему управления транспортным потоком после выпадения обильных снегопадов, приводящую транспортную систему к стабильному работоспособному состоянию.
Задание 4
Определите, являются ли следующие системы устойчивыми:
а) метроном;
б) экосистема в пруду для разведения рыбы;
в) стая обезьян;
г) система управления железнодорожным транспортом;
д) система образования.
(Cffi вопрос-проблема
1. Как следует из доклада ООН о развитии человечества
за 1998 год, три самых богатых человека в мире имеют сово
купное личное состояние, превышающее валовой продукт
48 наименее развитых стран, 225 самых богатых людей пла
неты имеют совокупное состояние более чем 1 трл долларов,
а 3/5 из 4,4 млрд жителей развивающихся стран лишены
канализации, 1/3 — чистой воды, 1/5 — медицинского об
служивания. Американцы тратят на косметику 8 млрд дол
ларов в год. По оценкам ООН, 6 млрд. долларов хвалило бы
для того, чтобы дать всем детям мира начальное образова
ние. Европейцы съедают мороженого на 11 млрд долларов в
год, хотя 9 млрд долларов хватило бы на то, чтобы обеспе
чить чистой водой и надежной канализацией всех нуждаю
щихся в мире. Американцы и европейцы тратят 17 млрд
долларов на корм для домашних животных, но 13 млрд хва
тило бы, чтобы обеспечить элементарную медицинскую по
мощь всех нуждающихся по всему миру.
Можно ли такую цивилизацию считать устойчивой системой? Каковы возможные перспективы её развития?
2. Чем, по вашему, является массовая культура — искус
ством или инструментом управления?

Как показали исследования американского экономиста Д. Стиглера (Нобелевская премия по экономике 1982 года), в самоуправляемых системах большинство прогнозов оказываются неточными, а решения принимаемые на их основе — неэффективными. Например, ни одно из постановлений правительства США, которое в течении ряда лет пыталась регулировать экономику, не дало ожидаемых результатов. Более того, эти результаты были прямо противоположными тем, которые ожидали. Причина была в том, что в условиях неустойчивого развития системы схема: «управляющее воздействие — желаемый результат» не работает. Управление становится эффективным в том случае, когда главное не сила, а правильная организация воздействия на систему. Слабые, но правильно организованные, соответствующие структуре и тенденциям ее развития воздействия, оказывают более заметное влияние на систему, чем сильные, но прямые управляющие воздействия. Такие воздействия получили название «слабых резонансных воздействий». Характерно, что наблюдатель, находящейся «внутри» системы, слабые резонансные воздействия практически не замечает, даже если они имеют искусственный характер.
Рассмотрим простейшую модель кругооборота капитала в какой-нибудь банковской системе.
Пусть в эту систему входит три банка: А, В, С, которые продают и покупают акции. Чтобы избежать больших чисел, будем считать, что стоимость всех акций ограничена единицей.
Предположим следующее:
- банк А продает некоторые акции по цене X.
- банк В, купив эти акции, в силу сложившихся обстоятельств вынужден продавать их по цене 1-Х.
- банк С, покупая акции у банков А и В, продает их по цене Х(1-Х).
- банк А, реагируя на такое изменение цены акций сам начинает продавать их по цене Х(1-Х), умноженной на некоторый коэффициент к, то есть по цене кХ(1-Х).
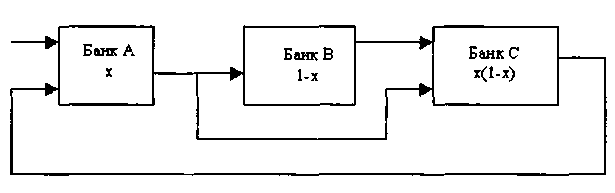
Рис. 3.5.5. Схема кругооборота капитала в условной банковской системе
При фиксированном коэффициенте к мы имеем систему, поведение которой зависит от значения к. Таким образом, к можно рассматривать как управляющее воздействие на данную систему.
Данная модель может быть реализована на компьютере. Тогда зависимость поведения системы от значения к можно детально исследовать с помощью компьютерного эксперимента (подробно об этом см. параграф главы 4, посвященный компьютерному эксперименту).
В итоге получается следующая картина.
При к < 3 переменная X стремиться к некоторому фиксированному значению Х0. В этом случае, аттрактор данной системы состоит из одной точки. Это — стабильное состояние системы.
При малом увеличении к (немного больше 3) значение X начинает колебаться между двумя значениями. Аттрактор системы теперь уже состоит из двух точек Х0 и X,. Эта состояние системы уже не стабильно, хотя его еще можно считать устойчивым. При этом, некоторое значение к0 определяет точку бифуркации: систему в точке к0 можно привести к стабильному состоянию со значением Х0 и X, с помощью малого дополнительного воздействия.
При увеличении к свыше к0 количество точек аттрактора возрастает и система, соответственно, становится менее и менее устойчивой.
Наконец, при к больших некоторого значения Ц переменная X начинает принимать бесконечное число значений. Система полностью теряет устойчивость. Образуется хаос.
Анализ приведенного примера подсказывает две основные стратегии управления.
- Управляя только параметром к, добиться стабильного состояния системы. В этом случае можно ориентироваться на традиционную схему управления, приведенную в §1 данной главы. Субъектом управления, в этом случае выступает банк А, а целью управления — создание стабильной банковской системы.
- Попытаться повысить свои доходы, используя нестабильность системы. Для этого необходимо зафиксировать значение к0 параметра к. Система перейдет в самоуправляемое состояние с двумя возможными значениями параметра X: Х0 и Хг Путем малого постороннего воздействия необходимо «подтолкнуть» систему к «выбору» нужного значения X. После этого можно объявить X результатом «правильно организованного» самоуправления. Далее можно попытаться улучшить результат и перейти к точке бифуркации kr Последствия этого шага определяется известной пословицей: «либо пан, либо пропал», поскольку в случае ошибки управления система превращается в хаос.
Данный пример показывает, какую роль в управлении играют точки бифуркации. Эти точки можно выявлять, чтобы избежать их и сохранить систему в стабильном состоянии, но можно создавать специально, исходя из опеделен-ных целей управления. Более того, в любой реальной системе речь идет не об отдельной ситуации неустойчивости, а о целом каскаде бифуркаций.
Управление через нестабильное состояние системы с необходимостью подразумевает наличие, как минимум, двух взаимосвязанных управляющих воздействий:
- воздействие, создающее каскад бифуркаций;
- слабое целенаправленное (резонансное) воздействие в точках бифуркаций.
В общем виде, схема управления системой через ее нестабильность выглядит так, как показано на рис. 3.5.6.
Воздействие, создающее каскад бифуркаций направлено, как правило, на разрыв системных связей между управляв-
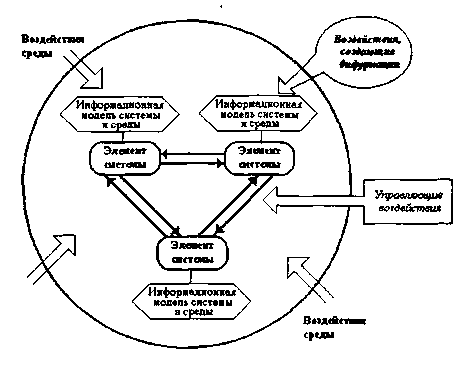
Рис. 3.5.6. Схема создания ситуаций нестабильности в самоуправляющейся системе
мым объектом и другими объектами системы. Потеряв или существенно ослабив системные связи, объект становится «подвижным» и очень чувствительным даже к слабым управляющим воздействиям.
Как известно, системные связи могут иметь материальный или информационный характер. В последнем случае речь идет об общности информационных моделей, которыми руководствуются объекты системы в своей деятельности. Дестабилизирующее воздействие направлено, как правило, на разрушение именно этих, информационных связей, то есть на деформацию всей информационной системы.
В неустойчивом состоянии слабое воздействие на систему может быть абсолютно незаметно для объекта управления. В этом случае он оказывается похожим на падающий камень, который по выражению философа Б. Спинозы (1632-77) думает, что он падает по своей воле. Это значит, что управляющее воздействие, равно как и его цель оказываются для объекта управления, во многом, анонимными.