
Автореферат диссертации на соискание ученой степени
| Вид материала | Автореферат диссертации |
- Автореферат диссертации на соискание ученой степени, 378.33kb.
- Автореферат диссертации на соискание учёной степени, 846.35kb.
- Автореферат диссертации на соискание ученой степени, 267.76kb.
- Акинфиев Сергей Николаевич автореферат диссертации, 1335.17kb.
- L. в экосистемах баренцева моря >03. 02. 04 зоология 03. 02. 08 экология Автореферат, 302.63kb.
- Автореферат диссертации на соискание ученой степени, 645.65kb.
- Автореферат диссертации на соискание ученой степени, 678.39kb.
- Автореферат диссертации на соискание ученой степени, 331.91kb.
- Автореферат диссертации на соискание ученой степени, 298.92kb.
- Автореферат диссертации на соискание ученой степени, 500.38kb.
УЧРЕЖДЕНИЕ РОССИЙСКОЙ АКАДЕМИИ НАУК
ИНСТИТУТ ПРОБЛЕМ УПРАВЛЕНИЯ
им. В.А. ТРАПЕЗНИКОВА РАН
(ИПУ РАН)
На правах рукописи
УДК 62-50: 62-525: 628
БЕЗМЕНОВ Василий Серафимович
РАЗРАБОТКА ПРИНЦИПОВ И МЕТОДОВ ПОСТРОЕНИЯ
ПНЕВМАТИЧЕСКИХ СИСТЕМ
АВТОМАТИЗИРОВАННОГО ДОЗИРОВАНИЯ ЖИДКОСТЕЙ
Специальность: 05.13.05 – Элементы и устройства вычислительной
техники и систем управления
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
доктора технических наук
Москва, 2009
Работа выполнена в ИПУ РАН
Официальные оппоненты:
доктор технических наук, профессор, главный научный сотрудник ИПУ РАН Совлуков Александр Сергеевич
доктор технических наук, заведующий аспирантурой
ОАО «Научно-исследовательский институт
железнодорожного транспорта» (ОАО «ВНИИЖТ»)
Гогричиани Георгий Венедиктович
доктор физико-математических наук, профессор,
проректор по научной работе
Московского государственного университета
технологии и управления (МГУТУ)
Краснов Андрей Евгеньевич
Ведущая организация:
ГУП г. Москвы «Институт Мосводоканал НИИ Проект»
Защита состоится «_____» ____________________2009 г. в __ час.
на заседании Диссертационного совета Д 002.226.03 Института проблем управления им. В.А. Трапезникова РАН по адресу: 117997, г. Москва,
ул. Профсоюзная,65.
С диссертацией можно ознакомиться в библиотеке Института проблем управления им. В.А. Трапезникова РАН
Ученый секретарь
Диссертационного совета
к.т.н. А.А. Кулинич
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Проблематика диссертации. В диссертации решается крупная научно-техническая проблема, имеющая важное народно-хозяйственное значение, - создание конкурентоспособного однотипного дозировочного оборудования для автоматизации производственных технологических процессов (ТП), содержащих контуры дозированной подачи жидкостей. В этой связи в работе предложена новая технология построения систем автоматизированного дозирования (САД) жидкостей, рассматриваемых в виде совокупности дозирующего устройства (ДУ) как объекта управления и устройства управления (УУ), обеспечивающего управление исполнительными органами ДУ по заданному алгоритму. Проектирование САД ведется на основе использования методов отмеривания дозы по косвенным параметрам, аппаратуры промышленной пневмоавтоматики УСЭППА и ЦИКЛ в узлах управления и датчиков параметров течения жидкостей барботажного типа.
Актуальность.
1. Значительная часть ТП химических, нефтехимических, пищевых, текстильных, парфюмерных, лакокрасочных, фасовочных (разлив жидких продуктов в тару) и других производств характеризуется наличием операций, для выполнения которых необходима реализация автоматической подачи в объект управления (ОУ) устанавливаемых технологическим регламентом доз или расходов жидких компонентов. При этом при проектировании оборудования необходимо учитывать разнообразие физико-химических свойств дозируемых составов, обеспечивать достаточно высокую точность и широкие диапазоны дозирования.
Задача автоматизации операций дозирования усложняется, если требуется реализовать систему автоматического регулирования (САР) параметров ТП, эффект регулирования в которой достигается посредством ввода в ОУ доз жидкости. В этом случае САД надо рассматривать и, соответственно, проектировать как исполнительное устройство (ИУ) в составе САР, в которой, помимо средств автоматического контроля и регулирования основных параметров, должны содержаться контуры управления собственно процессами дозирования.
И здесь проектировщик сталкивается с еще более сложной задачей, когда ОУ обладает инерционным запаздыванием и параметрической нестационарностью. Последняя выражается в непостоянстве во времени его динамических параметров.
Типичными примерами таких ОУ являются объекты очистки промышленных сточных вод гальванических производств.
Эти ОУ характеризуются следующими общими признаками:
- возможностью описания динамики реакторов очистных установок передаточной функцией Wо(s) вида: Wo(s)= koexp(-τos)/(Tos+1), где ko, τo и Тo - соответственно, коэффициент усиления, постоянная времени и время запаздывания ОУ;
- параметрической нестационарностью, выражающейся в непостоянстве во времени параметров ko, τo и Тo или части из них, обусловленной их зависимостью от химического состава сточных вод.
Согласно рекомендациям, изложенным в научно-технической литературе, при выборе закона регулирования для такого рода объектов необходимо учитывать величину отношения τo/To, служащую общей динамической характеристикой ОУ. В зависимости от величины τo/To рекомендуется выбирать двухпозиционный закон регулирования при τo/To < 0,2; пропорциональный - при 0,2 ≤ τo/To ≤ 1,5; импульсный - при τo/To > 1,5.
На практике же, ввиду параметрической нестационарности данных ОУ и ограниченности времени процесса обезвреживания промстоков, применение какого-либо одного из указанных законов регулирования не обеспечивает нужные характеристики САР по точности и быстродействию. Для достижения должного качества очистки в реальных условиях, необходимо применение САР с перенастраиваемой структурой, для реализации которых требуется определенный класс практически отсутствующих в промышленности универсальных САД, конструктивно и функционально приспособленных к выполнению операций как порционного, так и непрерывного дозирования. Термин «функционально приспособленных» означает, что эти системы должны иметь датчики выходных параметров и соответствующие функциональные блоки, воспринимающие входные управляющие сигналы для реализации того или иного алгоритма управления дозированием.
2. Среди указанных выше производств, связанных с задачами автоматизации процессов дозирования жидкостей, фасовочные производства занимают особое место. Это связано с тем, что в последнее десятилетие в России получает развитие упаковочная отрасль. Образовался целый ряд предприятий малого и среднего бизнеса, занимающихся производством и расфасовкой жидких продуктов в тару. В связи с этим становится чрезвычайно актуальной проблема создания высокоточного, недорогого, надежного и компактного импортозамещающего фасовочного оборудования, учитывающего специфические условия малых производств.
В отличие от крупносерийных и массовых производств такое оборудование должно быть приспособлено к работе с большой номенклатурой дозируемых составов и иметь возможность оперативной переналадки на разные типы продукции.
3. В научно-технической литературе общепризнанной является классификация САД по основным принципам действия.
Здесь выделяются следующие группы устройств и систем дозирования: замкнутые САР параметров ТП с расходомерами на линиях подачи дозируемой жидкости в объект – приемник доз и насосы-дозаторы, реализующие функции непрерывных САД; системы автоматического отмеривания доз с расходомерами и интегрирующим устройством, ДУ сифонного и эрлифтного типов, а также ДУ с мерной емкостью, реализующие функции порционных САД.
Строящиеся по рассмотренным схемам замкнутые САР с расходомерами имеют низкую точность при малых величинах производительности, что связано с нестабильностью характеристик регулирующих клапанов, особенно при работе с малыми перепадами давлений. Другим их недостатком является наличие конструктивно сложных расходомеров, устанавливаемых в линиях подачи дозируемой среды, и вторичных приборов, понижающих надежность данных систем.
Системы автоматического отмеривания доз, реализующие функции порционных САД работают по одному из двух принципов:
- путем суммирования мгновенных значений расхода, осуществляемого посредством связанного с расходомером интегрирующего устройства, и отключения исполнительного механизма (ИМ) при достижении заданной величины дозы. В качестве интегрирующего устройства используются различные системы задания, учета и регистрации протекших количеств жидкости, работающие в комплекте с крыльчаткой или подобного рода датчиком расхода, преобразующим объемный расход жидкости в скорость вращения чувствительного элемента (вертушки, ротационные, барабанного типа);
- путем использования ДУ непрерывного действия с постоянным расходом на выходе (в качестве которых выступают насосы-дозаторы с усреднителем расхода) с отмериванием дозы по времени.
Данные принципы построения систем порционного дозирования неприемлемы для отмеривания и выдачи малых доз ввиду наличия больших статических и динамических ошибок, возникающих из-за нелинейности и инерционности датчиков расхода и регулирующих органов (в первом случае) и из-за наличия относительно больших по продолжительности и, как правило, нестабильных переходных процессов изменения расхода дозируемой среды при включении и выключении ДУ (во втором случае).
Насосы-дозаторы (электроприводные и пневматические), применяемые главным образом на жидкостях, не содержащих твердой фазы, являются конструктивно сложными, имеют узкий диапазон дозирования. Насосы-дозаторы целесообразно применять при значительном противодавлении в объекте – приемнике доз, а также для непрерывного напорного объемного дозирования при соблюдении бесперебойности подачи и постоянства концентрации дозируемого состава.
ДУ сифонного и эрлифтного типов являются высоконадежными безарматурными системами свободного и низконапорного истечения. Однако, их применение в качестве средств автоматизации ТП ограничено.
ДУ сифонного типа могут использоваться лишь для дозирования фиксированных объемов жидкости и не позволяют производить автоматическую дистанционную регулировку величины дозы. Кроме того, для обеспечения приемлемой точности дозирования требуются дополнительные средства стабилизации перепада давлений на линии подачи жидкости, а также дополнительные ИУ для автоматизации операций пуска и останова сифона.
ДУ эрлифтного типа могут применяться лишь на невязких жидкостях.
ДУ с мерной емкостью конструктивно сложны и применимы лишь для дозирования фиксированных или изменяемых в сравнительно узком диапазоне доз жидкости, что связано с ограниченностью объема ME.
Представляют особый интерес безарматурные устройства транспортировки жидких сред под действием избыточного давления сжатого воздуха, создаваемого в замкнутом расходном резервуаре-монжусе. Эти устройства не являются собственно ДУ, так как имеют существенную зависимость расхода на выходе от текущего положения уровня жидкости в резервуаре. Тем не менее, эти устройства не содержат гидрозапорную арматуру в линии подачи жидкости. Именно это обстоятельство явилось причиной принятия их за основу для дальнейшей доработки и реализации безарматурных универсальных САД.
Среди систем расфасовки жидких продуктов в тару на сегодняшний день наибольшее распространение получили дозаторы объемно-поршне-вого типа с мерными камерами (МК) переменного объема и с клапанно-поршневыми ИМ и весовые, в которых реализован прямой метод отмеривания дозы: по объему МК (в первом случае) или по показаниям автоматизированных электронных весов (во втором случае).
Другими распространенным типами ДУ являются ДУ гравитационного типа с отмериванием дозы по уровню жидкости в таре и перистальтические – с отмериванием дозы по числу оборотов приводного вала.
Таким образом, обосновывая актуальность темы диссертации, необходимо отметить следующее.
Известные ДУ имеют ряд принципиальных недостатков, ограничивающих их эффективное использование как для построения универсальных САД для автоматизации ТП, так и в качестве фасовочного оборудования в условиях малых производств.
К этим недостаткам относятся: сложность конструкций узлов дозирования и управления; сравнительная узость обеспечиваемых диапазонов дозирования; неприспособленность оборудования к дозированию сред с различными физико-химическими свойствами; узкие функциональные возможности по оперативной перенастройке выходных параметров ДУ.
Целью работы является исследование и разработка принципов построения, методики проектирования и аппаратурной реализации гаммы САД жидкостей широкого назначения, в том числе следующих систем.
1. Универсальных САД для построения САР ТП с перенастраиваемой структурой для ОУ, обладающих инерционным запаздыванием и параметрической нестационарностью (на примере ОУ процессами очистки промышленных сточных вод гальванопроизводств).
2. Универсальных автономных САД для автоматизации процессов порционного и непрерывного дозирования жидкостей в устанавливаемых технологическим регламентом количествах.
3. Высокоточных, недорогих и компактных импортозамещающих САД для расфасовки жидких продуктов в тару для малых производств, в том числе типовых с ручной установкой тары на позицию налива, и строящихся на основе типовых – индивидуальных систем, встраиваемых в конвейерные линии, с широкими функциональными возможностями по оперативной перенастройке как величины дозы, так и диапазона дозирования.
4. Систем многокомпонентного дозирования.
Задачи диссертационной работы. Для достижения поставленной цели необходимо было решить следующие задачи:
- провести обзор и анализ существующих методов дозирования жидкостей, а также принципов построения и конструктивных особенностей промышленных автоматизированных ДУ и САД;
- выработать классификационные признаки, на основании которых может быть произведен выбор рациональных принципов организации и построения указанных в цели работы систем;
- разработать методы преобразования расхода жидкости (как основного регламентируемого параметра процессов дозирования) в выходные параметры, приемлемые и удобные для построения пневматических САД, в том числе универсальных (в вышеуказанном смысле);
- на основе изучения ТП расфасовки жидкостей в тару и используемого в этих процессах промышленного дозировочного оборудования, выявить специфику малых производств и разработать принципы построения и методику проектирования типовых и индивидуальных САД, удовлетворяющих требованиям данных производств;
- выработать критерии и разработать принципы построения систем многокомпонентного непрерывного и порционного дозирования.
Методы исследования. Проведенные исследования базируются на основах гидродинамики неустановившегося движения жидкости, математической теории обработки данных экспериментов, теории линейных систем автоматического регулирования, на применении формализованного описания последовательности технологических операций автоматизируемого процесса в виде графа операций, а также на использовании известных методов и прикладных программ на персональных компьютерах, позволяющих сократить трудозатраты на разработку и проектирование САД.
Научная новизна. Научная новизна работы заключается в разработке, обосновании, аналитическом и экспериментальном исследовании новых оригинальных технологий и схемных решений на основе методов отмеривания дозы по косвенным параметрам для создания комплекса САД жидкостей. Данная обобщенная формулировка научной новизны работы раскрывается следующими новациями.
1. Разработана новая классификация САД по признакам наличия или отсутствия в системе датчиков контроля ее выходных параметров и по методам контроля этих параметров, на базе которой выработаны рациональные принципы организации и построения САД, указанных в цели работы.
2. На основе предложенного нового способа порционного дозирования жидкостей разработан новый класс замкнутых универсальных САД с единым выходным параметром - текущей величиной расхода жидкости на выходе ДУ, преобразуемой в давление сжатого воздуха.
3. Предложена методология анализа систематических погрешностей процессов порционного дозирования жидкостей, приемлемая и для анализа метрологических характеристик аналогичных процессов.
4. Разработаны принципы построения, методика проектирования и номенклатура типовых САД по косвенным параметрам для малых производств на основе использования датчиков параметров течения жидкостей барботажного типа и аппаратуры промышленной пневмоавтоматики систем УСЭППА и ЦИКЛ.
Достоверность научных положений и выводов, полученных в диссертации, подтверждена результатами практического использования разработанных систем дозирования на ряде промышленных объектов.
Практическая ценность работы заключается в создании новых принципов построения, методики проектирования и аппаратурной реализации САД по косвенным параметрам с едиными принципами их организации и реализации на элементной базе промышленной пневмоавтоматики.
В диссертации получены следующие практические результаты.
1. Разработаны оригинальные схемы построения и аппаратурная реализация пневматических функциональных блоков УУ в составе САД:
2. Разработаны критерии и принципы построения универсальных многокомпонентных САД, предложен ряд конструктивных и схемных решений, упрощающих реализацию систем многокомпонентного дозирования.
3. Показаны особенности проектирования индивидуальных САД и их использования как нестандартного дозировочного оборудования для решения задач дозирования жидких продуктов в условиях малых производств.
Результаты работы нашли практическое применение на ряде производств на предприятиях малого и среднего бизнеса в виде автоматизированных систем дозирования, прошедших этап опытной, а после их доводки - промышленной эксплуатации. Получены акты внедрения разработанных и переданных заказчикам систем, что подтверждается соответствующими актами о внедрении.
Диссертационная работа выполнена в рамках плановой тематики Института проблем управления им. В.А. Трапезникова РАН.
Апробация работы. Основные положения и результаты диссертационной работы докладывались на IX (Варшава, 1982) и X (Москва, 1986) Международных конференциях по пневмоавтоматике и струйной технике; на третьем Научно-техническом семинаре "Пневматические системы управления биологическими процессами", Москва, 1987; на Научно-практической конференции "Автоматизация в экологии и медицине", Самара, 1991; на Национальном форуме "Экология и экономика России", Москва, 1995; на Всероссийском совещании "Пневмоавтоматика", Москва, 1996; на третьей Международной конференции "Проблемы управления качеством окружающей среды", Москва, 1997; на Всероссийской конференции с международным участием "Пневмогидроавтоматика - 99", Москва, 1999; на Международной конференции по проблемам управления, Москва, 1999; на Третьей (Москва, 2006) и Четвертой (Москва, 2009) международных конференциях по проблемам управления; на Российской конференции с международным участием “Технические и программные средства систем управления, контроля и измерения” (УКИ'08), Москва, 2008; на семинарах ассоциации «Росупак».
Публикации. Основные результаты исследований и разработок по теме диссертации содержатся в 52 публикациях, в их числе 23 публикации в ведущих научных журналах и изданиях перечня ВАК.
Структура и объем работы. Диссертация состоит из введения, пяти глав и заключения, содержит 232 стр. машинописного текста, 53 рисунка, 8 таблиц и список литературы из 121 наименования.
СОДЕРЖАНИЕ РАБОТЫ
Во Введении обосновывается актуальность, формулируются цель и основные направления исследований, изложены методы исследования, научная новизна, практическая ценность и достоверность полученных результатов диссертационной работы.
Первая глава посвящена уточнению основных понятий в области дозирования жидкостей, обзору и критическому анализу принципов действия и конструктивных особенностей промышленных ДУ и САД, выработке классификационных признаков, на основании которых проводился выбор рациональных принципов организации и построения САД.
Из проведенного обзора и анализа известных методов и систем дозирования жидкостей сделаны следующие выводы.
1. Известные ДУ имеют ряд принципиальных недостатков, указанных в «Общей характеристике работы», ограничивающих их эффективное использование для построения указанных в цели работы систем.
2. Для выявления рациональных принципов построения САД целесообразно воспользоваться разработанной автором классификацией САД (рис.1), в основу которой положены признаки наличия или отсутствия в системе датчиков контроля ее выходных параметров и методы контроля этих параметров. При этом, применительно к САД, приспособленных для работы в составе САР с перенастраиваемой структурой, предпочтительным является принцип дозирования, основанный на использовании замкнутых по выходному параметру систем. Данному принципу в наибольшей степени соответствуют САД на базе ДУ с единым выходным параметром.
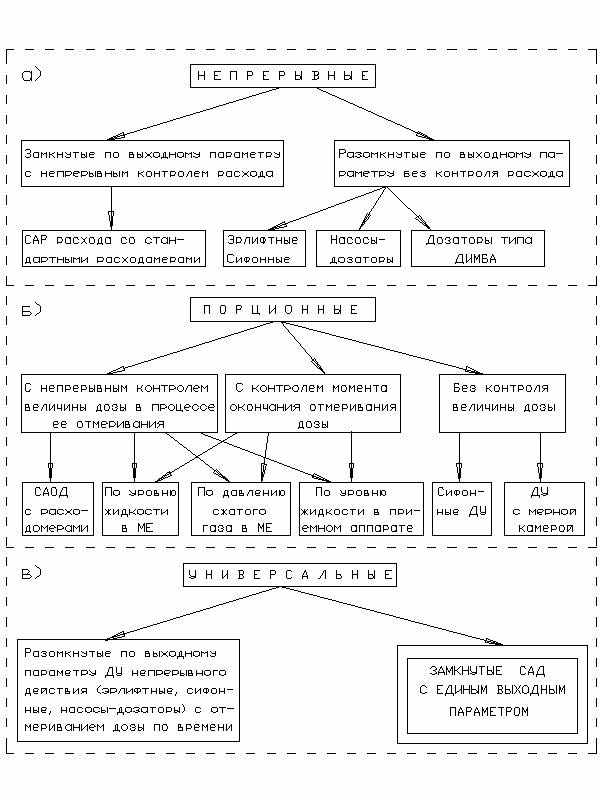
Рис.1. Классификация САД.
3. Поскольку значительная часть известных устройств и систем дозирования использует принцип отмеривания дозы по косвенным параметрам, этот способ нуждается в подробном исследовании с целью выявления возможности разработки более простых по реализации САД.
4. При решении задач автоматизации процессов разлива жидких продуктов в тару в первую очередь необходимо рассмотреть наиболее распространенные на практике технологические схемы установок разлива в совокупности с соответствующим данной схеме методом отмеривания дозы и выявить наиболее рациональные принципы построения САД. При этом, с целью унификации дозировочного оборудования для различных технологических схем, основное внимание следует уделить анализу возможности использования однотипного датчика параметров течения жидкости.
Во второй главе разрабатываются и исследуются замкнутые по выходному параметру универсальные САД на базе ДУ с единым выходным параметром. Рассматривается их использование в качестве ИУ в составе САР параметров ТП с перенастраиваемой структурой (на примере процессов очистки промышленных сточных вод гальванопроизводств).
В диссертации показано, что реализация практически всех известных методов очистки промстоков гальванопроизводств связана с необходимостью организации контуров дозированной подачи жидких химреагентов в очистные установки либо в заданных технологическим регламентом количествах (при использовании физико-химических методов), либо в количествах, определяемых в процессе автоматического регулирования параметров процесса очистки (при использовании химреагентных и электрохимических методов). В последнем случае основными регулируемыми параметрами являются кислотность вод рН и концентрации загрязняющих компонентов.
Как отмечалось выше, объекты очистки промстоков гальванопроизводств обладают инерционным запаздыванием и параметрической нестационарностью. Поэтому предпочтительным для такого рода ОУ является принцип дозирования, основанный на использовании замкнутых по выходному параметру универсальных САД на базе ДУ с единым выходным параметром.
Для определения такого параметра установим связь между объемом дозы Vд, отпускаемым потребителю за время Тд цикла порционного дозирования, и текущей (по времени t) величиной расхода Q(t) на выходе ДУ.
Искомая связь между указанными параметрами существует и является однозначной при использовании предложенного нового способа порционного дозирования. Данный способ (рис.2) предполагает, во-первых, одновременное выполнение операций порционного дозирования - транспортировку жидкости, отмеривание дозы, и ее выдачу. Во-вторых, этот способ заключается в том, что отмеривание дозы производится следующим образом.
Мгновенную величину расхода Q(t) изменяют посредством ее автоматического программного регулирования по заданному закону: Q(t) = Q3(t). Расход Q(t) сначала увеличивают в течение времени t* от его начального (в момент времени t=0) минимального значения Qmin до некоторого, фиксированного для каждой дозы, заданного значения Qз*, а затем уменьшают до нуля. Указанные изменения Q(t) формируются с помощью показанных на рис.2 пунктирными линиями монотонно возрастающей (ψ1(t)) и монотонно убывающей (ψ2(t)) базовых функций, имеющих нулевой корень.
Таким образом, контроль и управление процессами как порционного, так и непрерывного дозирования можно вести по единому выходному параметру - мгновенной величине расхода Q(t) жидкости. При непрерывном дозировании расход Q(t) должен поддерживаться на заданном постоянном уровне Q(t) = Qз* = const, определяющем производительность ДУ. При порционном дозировании параметр Q(t) должен изменяться по заданным - Q1,3(t) и Q2,3(t) законам:
Q(t) = Q1,3(t) + Q2,3(t), где Q1,3(t) ≡ Qmin + ψ1(t) – при 0 < t ≤ t*,
Q2,3(t) ≡ Qз* + ψ2(t – t*) – при t* ≤ t ≤ Тд…………………………………......(1)
При этом объем дозы и время дозирования могут изменяться в широких пределах за счет изменения базовых функций ψ1(t) и ψ2(t) и параметра задания дозы Qз*.
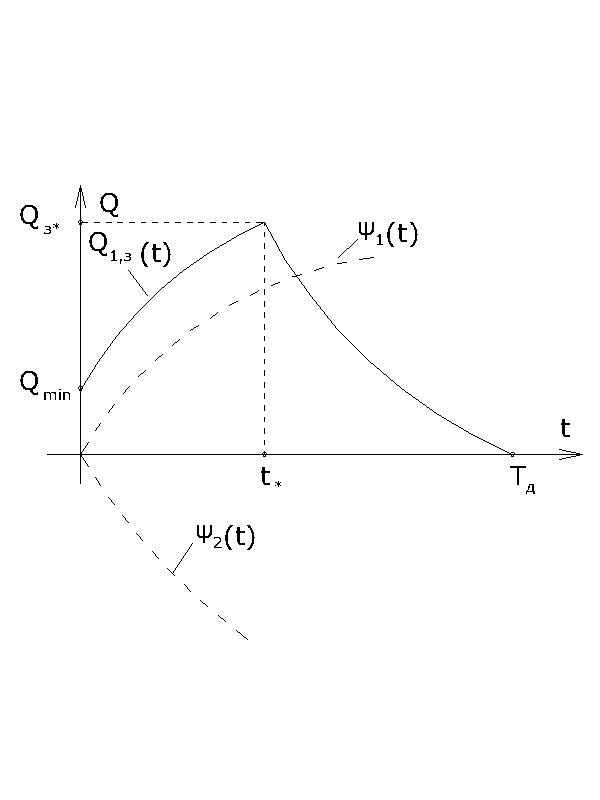
Рис.2. Способ порционного дозирования.
С учетом (1) объем дозы Vд, отпускаемый потребителю за время Тд цикла порционного дозирования, связан с расходом Q(t) соотношением:
t* Тд t* Тд
Vд = ∫ Q1,3(t) dt + ∫ Q2,3(t) dt = ∫ [Qmin + ψ1(t)] dt + ∫ [Qз* + ψ2(t – t*)] dt,…...(2)
0 t* 0 t*
где время t* изменения расхода в сторону его увеличения и полное время дозирования Тд определяются из граничных условий:
Q1,3(t*) ≡ Qmin + ψ1(t*) = Qз*; Q2,3(Тд) ≡ Qз* + ψ2(Тд – t*) = 0……………......(3)
На рис.3а показана схема конструкции проточного преобразователя мгновенной величины расхода Q(t) в давление p(t) сжатого воздуха, представляющего собой замкнутую дозировочную емкость (ДЕ) 1 с входным патрубком 2 и коротким цилиндрическим сливным насадком 3.
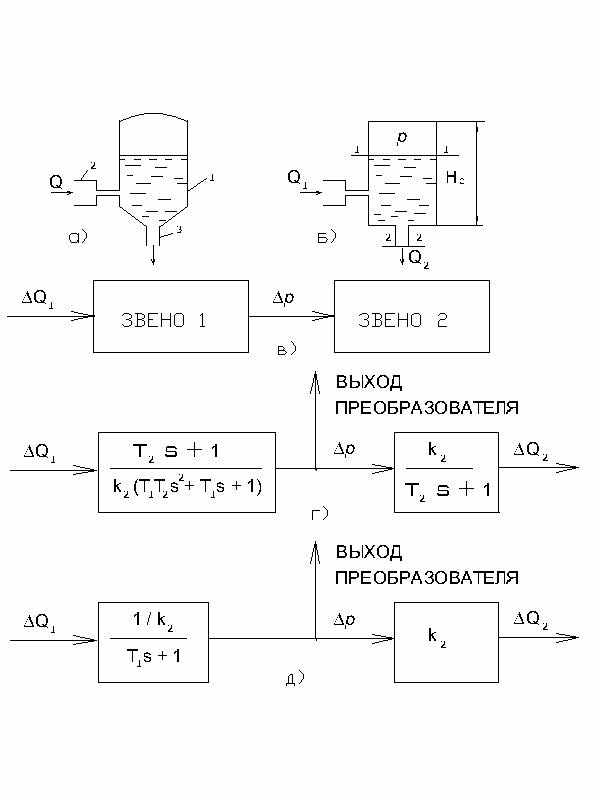
Рис.3. Схемы преобразователя: а - принципиальная, б - расчетная,
в, г, д - структурные.
Принцип действия преобразователя основан на повышении давления р сжатого воздуха в газовом пространстве ДЕ при подаче дозируемой жидкости через входной патрубок 2 и далее, через насадок 3, - к потребителю.
Истечение жидкости из ДЕ имеет стабильный характер (происходит с заполнением ею внутренней полости насадка и сопровождается повышением давления р при расходах Q, превышающих некоторое минимальное значение Qmin (зону нечувствительности преобразователя), которая зависит от конструктивных параметров ДЕ и может быть определена из статической характеристики преобразователя.
Для выбора величин конструктивных параметров ДЕ и оценки их влияния на точность дозирования получены статическая и динамические характеристики преобразователя.
Для этого использовались его расчетная схема (рис.36) и двухзвенная структурная схема (рис.3в). В расчетной схеме, с целью упрощения выкладок, принята за основу цилиндрическая форма ДЕ. Структурная схема (рис.3в) составлена по отношению к управляющему (входному) воздействию преобразователя в виде приращения притока ΔQ1=Q1–Q1,0 жидкости в ДЕ и к выходным параметрам в виде приращений давления Δр = р - р0 (для звена 1) и расхода на выходе ДЕ ΔQ2 Q2–Q2,0 (для звена 2), где p0 - установившееся значение давления р, соответствующее постоянным по времени t (установившимся) величинам притока Q1,0 и расхода Q2,0 жидкости: Q1,0=Q2,0=Q0= const.
Статическая характеристика преобразователя имеет вид
Q0 = φ f {(2 / ρ) р0 + 2g [l + Не р0/(p0 + Pa)]}1/2……………………........(4)
и получена из решения системы двух уравнений: уравнения Бернулли для установившегося турбулентного движения несжимаемой жидкости, записанного для сечений 1-1 и 2-2 (рис.3б) и уравнения газового состояния в ДЕ для модели изотермического процесса сжатия газа. В выражении (4) - φ - коэффициент расхода, f=πd2/4 - площадь проходного сечения насадка, l и d - длина и внутренний диаметр насадка, ρ - плотность жидкости, g - ускорение силы тяжести, Pa - атмосферное давление, Не - высота ДЕ.
Истечению жидкости из ДЕ с минимальным расходом соответствует точка характеристики (4), для которой р0 = 0 и Qmin= φ f (2g l)1/2.
Рассмотрим реализацию предложенного способа порционного дозирования для частного случая, когда системой программного регулирования расхода Q(t) производится только его увеличение от 0 до Qз* по заданному закону Q(t) = Q1,з(t) ≡ Qmin + ψ1(t), после чего выполняется операция отсекания дозы (быстрое уменьшение до нуля расхода на выходе ДУ). Заданный характер изменения расхода Q(t) может быть получен посредством программного регулирования давления р по заданному, рз(t), например, по наиболее просто реализуемому средствами пневмоавтоматики экспоненциальному закону.
При таком алгоритме порционного дозирования, а также при условии «идеальности» системы регулирования давления р, предполагающем тождественное равенство р(t) ≡ рз(t), количественная оценка объема дозы Vд, отпускаемого потребителю за один цикл Тд дозирования, полученная без учета инерционных свойств звена 2 преобразователя, может быть дана в виде:
t*
Vд=φf ∫ {(2/ρ)рз(t)+2g [l+Нер з(t)/(p з(t)+Pa)]}1/2dt+Vepз*/(pз*+Pa),……..(5)
0
где Vepз*/(pз*+Pa)=Vд,от- составляющая дозы, отпускаемая за время отсекания, определяемая как объем жидкости, накопленный в ДЕ за время t*,
pз* = рз(t*).
Построение системы непрерывного дозирования на основе ДЕ ведется посредством автоматической стабилизации давления р на заданном постоянном уровне p = рз* = const. При этом оценка производительности САД при условии «идеальности» САР давления р, будет иметь вид:
Q= φ f {(2/ ρ) рз* + 2g [l + Не рз*/(pз* + Pa)]}1/2………………………...(6)
Функциональные зависимости (5) и (6) представляют собой расчетные тарировочные характеристики ДУ и могут быть использованы для ориентировочной количественной оценки обеспечиваемых диапазонов дозирования.
Из (5) и (6) следует, что однозначная зависимость объема дозы и производительности ДУ от давлений задания (pз* и рз*) имеет место при постоянных величинах φ, ρ и Ра. При условии φ=const для процесса непрерывного дозирования систематическая погрешность δQ2(Ра)│max ничтожно мала и может не приниматься во внимание. Погрешность δQ2(ρ) должна учитываться при оценке метрологических характеристик САД.
Таким образом, исследованы факторы, вызывающие систематические погрешности дозирования при условии «идеальности» системы регулирования давления р. «Неидеальность» же системы регулирования приводит к появлению дополнительной динамической погрешности.
Чем меньше инерционность преобразователя и количество звеньев, определяющих его динамику, тем проще реализация качественного регулирования, направленного на снижение динамической погрешности. В этой связи в главе 2 исследованы динамические характеристики преобразователя и дана оценка влияния на них конструктивных параметров ДЕ.
Динамика преобразователя описывается системой трех уравнений.
1. Уравнением Бернулли для неустановившегося режима истечения жидкости через насадок, составленным с учетом неравенства u»dh/dt: р/ρg+l+h+(dh/dt)2/2g = (1/φ2) (u2/2g)+(l/g) (du/dt), где u(t) - текущее (по времени t) значение скорости истечения жидкости из ДЕ.
2. Уравнением газового состояния в ДЕ: h(t) = Не р / (р + Ра).
3. Уравнением баланса расходов в ДЕ: Fe (dh/dt) = Q1 - Q2, где Fe – площадь проходного сечения ДЕ.
Оценка динамических характеристик преобразователя проведена по его линейной модели. Такая оценка оправдана ввиду малых динамических отклонений давления р (и, соответственно, расхода Q2) от их заданных значений.
Полученная модель преобразователя имеет вид стандартных линейных дифференциальных уравнений:
Т2 d(ΔQ2)/dt + ΔQ2 = k2 Δр – для звена 2, где постоянная времени Т2 и коэффициент k2 вычисляются по формулам: Т2 = φ2 l f / Q0; k2 = φ2 f2 / ρQ0;
Т1Т2 d2(Δp)/dt2 + Т1 d(Δp)/dt + Δp = (T2/k2) d(ΔQ1)/dt + (1/k2) ΔQ1 – для звена 1, где Т1 - постоянная времени звена 1, вычисляемая по формуле:
Т1 = VePа/k2 (p0+Pa)2 = ρVePаQ0 / φ2 f2 (p0+Pa)2.
Таким образом, преобразователь расхода описывается двухзвенной структурой с передаточными функциями вида (рис.3г):
W1(s) = (Т2 s + 1) / k2 [(Т1Т2 s2 +Т1 s + 1)]; W2(s) = k2 / (Т2 s + 1)…….(7)
Анализ данной структуры показывает, что улучшение динамических характеристик преобразователя может быть проведено путем варьирования величин конструктивных параметров ДЕ. При достаточно малой величине постоянной времени Т2 и выполнении неравенства Т1/Т2«1 звено 1 можно рассматривать как апериодическое звено с коэффициентом усиления k1 = 1/k2 и постоянной времени Т1, а звено 2 - как усилитель с коэффициентом усиления k2 (рис.3д).
При определенных в диссертации соотношениях конструктивных параметров ДЕ эти условия выполняются, преобразователь расхода имеет передаточную функцию вида W(s) = k1/Т1 s + 1, является малоинерционным и вполне приемлем для реализации на его основе универсальных САД.
ДУ с преобразователем расхода в составе САД могут строиться по трем основным схемам (рис.4).
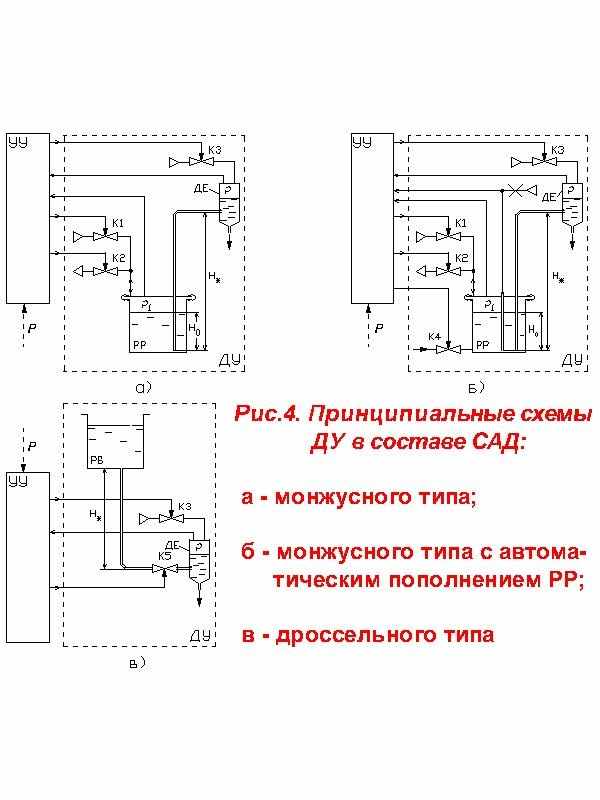
ДУ (рис.4а) не содержит гидрозапорную и регулирующую арматуру на линии подачи жидкости и может применяться на средах, содержащих значительный процент нерастворенной твердой фазы (например, на известковых суспензиях, являющихся основным химреагентом в процессах очистки сточных вод гальванопроизводств). ДУ (рис.4б,в) могут применяться на жидких средах с небольшим содержанием взвесей.
Работа САД (рис.4а,б) организуется по следующим алгоритмам.
В исходном состоянии в обеих системах производится продувка соединительного трубопровода (от РР к ДЕ) и сливного насадка.
При непрерывном дозировании УУ (рис.4а) посредством релейного двухпозиционного программного регулирования давления p1 по заданному экспоненциальному закону обеспечивает заполнение жидкостью трубопровода и автоматическую стабилизацию давления р на заданном постоянном уровне p = рз* = const (где рз* - давление задания производительности).
Цикл порционного дозирования в обеих САД включает стадии заполнения трубопровода под действием нарастающего по времени t по заданному экспоненциальному закону давления p1(t), наполнения ДЕ до уровня, соответствующего равенству p = pз* (где pз* - давление задания дозы), отсекания дозы путем переключения клапанов K1-K3 на операцию продувки и стадию пополнения РР через клапан K4, реализуемую в САД на рис.4б.
В САД на рис.4в стабилизация давления р при непрерывном дозировании и его программное регулирование при порционном дозировании осуществляются посредством разработанного для этих целей автором диссертации пневматического импульсного пропорционально-интегрального (ИПИ) регулятора, описание которого приводится в примере 2 второй главы диссертации. Действие регулятора основано на изменении проходного сечения регулирующего клапана К5 в зависимости от знака и текущей величины рассогласования давления р.
Рассмотренные САД могут иметь двоякое применение:
- в качестве ИУ в составе замкнутых САР параметров ТП; в этом случае на вход УУ подается показанный на рис.4 пунктирной линией аналоговый пневматический сигнал P, отражающий текущее значение регулируемого параметра, преобразуемого в давление сжатого воздуха;
- как автономные системы, предназначенные для решения других, не связанных с автоматическим регулированием параметров по замкнутой схеме, задач дозирования.
В первом случае первостепенное значение имеют надежность САД и возможность реализации ею различных законов регулирования, во втором - ее метрологические характеристики.
В работе для порционной САД с ДУ монжусного типа дана оценка влияния различных факторов на точность дозирования. При этом была использована следующая оригинальная методология.
Первоначально было составлено аналитическое описание процесса дозирования. Далее оценивалась повторяемость стадий процесса в отдельных реализациях цикла дозирования, которая была принята в качестве критерия отсутствия погрешностей дозирования. При этом считалось (без решения исходной системы уравнений), что эта повторяемость имеет место, если остаются неизменными рабочие параметры ДУ, а также начальные и граничные условия для входящих в описание стадий исходных уравнений.
Как показало проведенное исследование, наибольшую по отношению к другим погрешностям абсолютную величину имеет погрешность дозирования dVд(Н0), вызываемая изменением начального уровня заполнения РР.
Рассмотренный в диссертации метод компенсации данной погрешности заключается во введении в состав ДУ барботажного измерителя параметра H0, а в цикл дозирования дополнительной (предшествующей заполнению трубопровода) стадии - установки в РР начального давления p1,0. Последнее вычисляется пневматическим сумматором по формуле: р1,0 = р1,m - рh,0, где р1,m = const - умноженное на удельный вес жидкости g заданное начальное положение уровня в трубопроводе, соответствующее окончанию операции установки в РР начального давления, рh, 0 = gН0 - выходной сигнал барботажного датчика уровня. При реализации данного метода погрешность dVд(Н0) исключается.
Рассмотренная методология анализа систематических погрешностей порционной САД с ДУ монжусного типа (рис.4а) была также использована и при разработке типовой системы непрерывного дозирования на основе ДУ дроссельного типа (рис.4в). описание которой дается в примере 3 главы 2.
Накопленный в Институте проблем управления РАН опыт автоматизации производственных ТП средствами промышленной пневмоавтоматики позволил создать инженерную методику синтеза дискретных УУ в виде стандартной позиционной структуры, основанной на формализованном описании последовательности операций процесса в виде графа операций.
Данная методика, изложенная в главе 2 в конспективной форме, является наиболее эффективной и принята за основу при синтезе УУ в составе САД, строящихся на основе преобразователя расхода в давление сжатого воздуха. Эта методика проиллюстрирована в работе тремя примерами.
В примере 1 рассматривается САД, реализующая двухпозиционный и АИ (амплитудно-импульсный) законы регулирования параметра рН на установке периодического действия для химической нейтрализации кислотосодержащих сточных вод. Эта система была испытана и эксплуатировалась на очистных сооружениях НПО "Орион" в составе системы управления процессом очистки кислотно-щелочных вод. Для дозирования реагента (известкового молока) применено ДУ монжусного типа (рис.4а).
В примере 2 рассматривается САД отработанных щелочных растворов в составе установки непрерывного действия одноступенчатой гальванокоагуляционной очистки промстоков, реализующая (по выбору оператора) двухпозиционный, пропорциональный или АИ законы регулирования параметра рН. Для дозирования реагента - щелочных отработанных растворов применено ДУ дроссельного типа (рис.4в). САД выполняет функции узла автоматической корректировки параметра рН.
В примере 3 рассматривается типовая система непрерывного дозирования на основе ДУ дроссельного типа (рис.4в), отличительными особенностями которой являются наличие напорной магистрали на входе в ДЕ и протяженного сливного трубопровода на ее выходе, и исследуются методы повышения точности такой САД. Последние основаны на совершенствовании конструкции и схемы построения ДУ, а также алгоритма управления дозированием.
Таким образом, в главе 2 получены следующие результаты:
- предложен новый способ порционного дозирования жидкостей и разработан реализующий данный способ датчик-преобразователь расхода дозируемой среды в давление сжатого воздуха, проведено исследование его статических и динамических характеристик;
- дано описание схем построения и алгоритмов работы универсальных САД с преобразователем расхода, приведены примеры их использования в составе замкнутых САР технологических параметров с перенастраиваемой структурой;
- предложена математическая модель описания процесса порционного дозирования, реализуемого в САД с ДУ монжусного типа, и методология анализа ее метрологических характеристик, на основании которой выявлены факторы, вызывающие дополнительные систематические погрешности данных систем, рассмотрены методы компенсации этих погрешностей.
Третья глава посвящена разработке принципов построения, методики проектирования и аппаратурной реализации типовых порционных САД для расфасовки жидких продуктов в тару в условиях малых производств.
Типовые САД – это однажды разработанные системы, которые могут быть использованы без существенной доработки их принципиальной схемы с учетом особенностей ТП.
Типовые САД являются основой для разработки конкретной индивидуальной системы расфасовки с учетом особенностей и специфики ТП заказчика. Так что индивидуальные САД – это системы, отличные от типовых по принципиальной технологической схеме, составу оборудования и алгоритму управления.
Основной отличительной особенностью предлагаемых новых принципов построения САД является отказ от использования мерных камер с механическими подвижными элементами и дорогостоящих весоизмерительных устройств отмеривания дозы прямым методом и их замена на более простые по составу оборудования САД по косвенным параметрам, строящиеся на базе пневматических датчиков барботажного типа.
В зависимости от состава и схемы размещения оборудования системы расфасовки, а также диапазона дозирования, вязкости жидкости и типоразмеров тары операция отмеривания дозы может контролироваться по следующим косвенным параметрам: по времени - при условии обеспечения постоянной величины расхода жидкости в линии ее налива в тару; по достижении заданного уровня жидкости в таре в процессе ее наполнения; по гидростатическому давлению столба жидкости, отмеряемому в мерной емкости, являющегося косвенным параметром для отмеривания веса дозы.
При объемном дозировании с отмериванием дозы по времени организуется напорное истечение жидкости из замкнутого расходного резервуара-монжуса (РР) с постоянным перепадом давлений на линии налива (ЛН), обеспечиваемым регулятором давления в составе УУ. При этом величина дозы определяется временем дозирования и сечениями гидрокоммуникаций.
Рассмотрим показанную на рис.5. известную схему транспортировки жидкости под действием избыточного давления сжатого воздуха, создаваемого в РР, и определим условия, при которых данное устройство напорного истечения может быть использовано в качестве порционного ДУ.
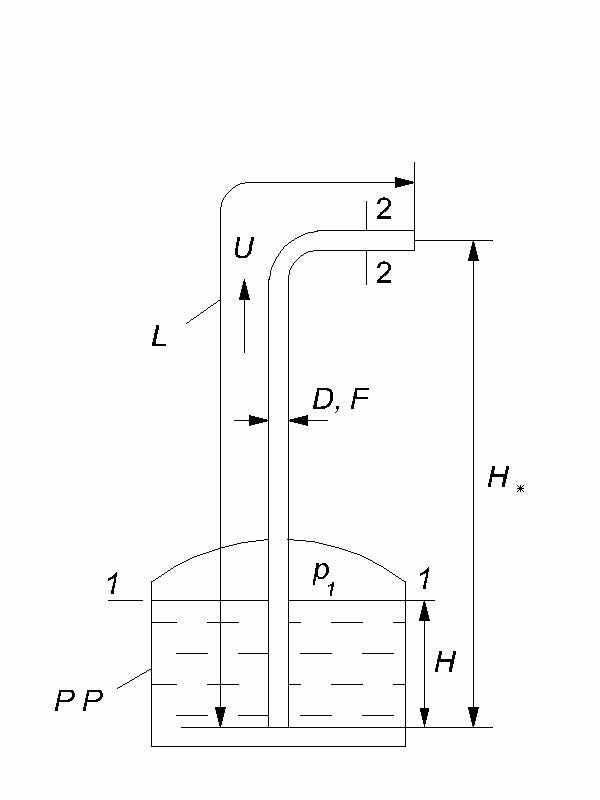
Рис.5. К описанию принципа дозирования по времени.
При произвольном характере изменения по времени t избыточного давления р1(t) сжатого воздуха в РР течение жидкости в выходном трубопроводе описывается дифференциальным уравнением Бернулли для неустановившегося турбулентного движения несжимаемой жидкости, которое для выделенных сечений 1-1 и 2-2 имеет вид:
р1 /g + H = [1 + + (L/D)] (u2/2g) + H* + (L/g) (du/dt),……………(8)
где - плотность жидкости, g - ускорение силы тяжести, Н - уровень жидкости в РР, L и D - длина и внутренний диаметр трубопровода, Н* - высота истечения, u - средняя по сечению трубопровода скорость течения, = соnst - коэффициент местного сопротивления на входе в трубопровод, зависящий от конфигурации входной кромки трубопровода, - коэффициент трения в трубопроводе, зависящий от текущего значения числа Рейнольдса Re=Du/ и от динамической вязкости жидкости , и рассчитываемый для турбулентного режима течения по формуле Блазиуса: =0,316 (Du / ) 1/4.
Анализ уравнения (8) показывает, что если в процессе истечения жидкости из РР поддерживать постоянным с помощью автоматического регулятора полное давление П = р1 + gH на входе в трубопровод, то при неизменных в процессе разлива жидкости величинах и , а также параметра H*, рассматриваемое течение будет установившимся. При этом u = const, и соответствующее установившееся значение объемного расхода жидкости рассчитывается по формуле: Q=kF[(2/) (П-gH*) ]1/2, где F=D2/4 - площадь сечения трубопровода, k=1/[1++(L/D)]1/2 - коэффициент расхода.
Таким образом, при П = соnst схему монжусной транспортировки жидкости можно рассматривать как ДУ непрерывного действия, а зависимость расхода Q от давления П, представляющая собой тарировочную характеристику ДУ, может быть легко получена экспериментальным путем.
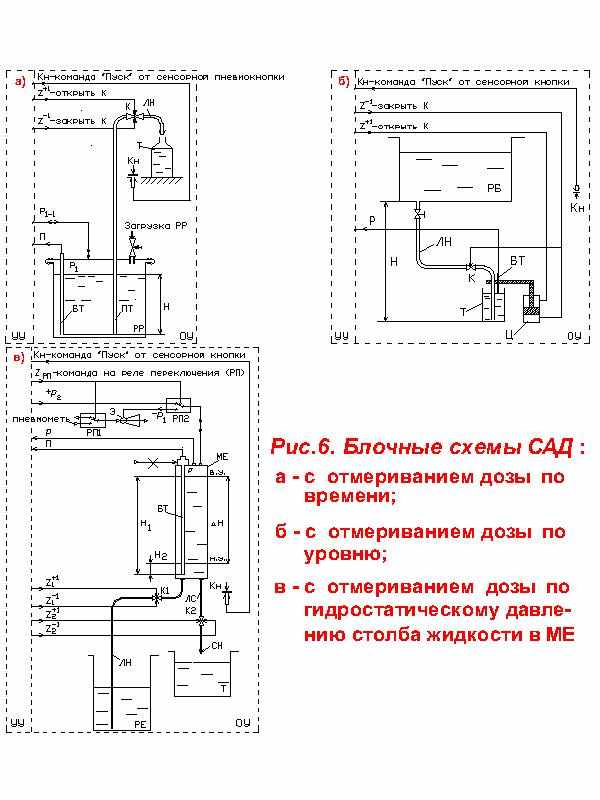
Для реализации на основе рассмотренного ДУ непрерывного действия операций порционного дозирования достаточно дополнить его схему отсечным клапаном (К), служащим для прерывания потока, и барботажной трубкой (БТ) – измерителем давления П (рис.6а). При этом величина дозы, заливаемой в тару (Т) определяется временем дозирования, заданной величиной Пз параметра П и проходными сечениями гидрокоммуникаций ЛН.
При объемном дозировании с отмериванием дозы по уровню жидкости в таре (рис.6б) организуется самотечное или напорное (под действием избыточного давления сжатого воздуха) истечение жидкости из расходного бака (РБ). ЛН содержит н.о. пневмоклапан К, который открывается по команде Z+1=1, формируемой по сигналу от пусковой пневмокнопки (Кн), и закрывается при достижении заданного уровня наполнения тары, настраиваемого посредством вертикального перемещения БТ, являющейся чувствительным элементом датчика уровня. Ввод БТ в полость тары (Т) и ее вывод осуществляется автоматически с помощью пневмоцилиндра (Ц). Верхняя граница диапазона дозирования ограничена лишь объемом тары.
При дозировании с контролем по гидростатическому давлению столба жидкости (рис.6в), являющегося косвенным параметром для отмеривания веса дозы, используется мерная емкость (МЕ) с установленной в ней БТ – чувствительным элементом датчика параметра Н (пропорционального весу дозы), где g - удельный вес жидкости, Н – уровень жидкости в МЕ над БТ. Отмеривание дозы производится посредством заполнения жидкостью МЕ от заданного нижнего уровня (н.у.) до заданного верхнего уровня (в.у.) через клапан налива К1 под действием разрежения, создаваемого в МЕ струйным эжектором (Э). Выдача дозы производится через сливной клапан К2.
Заданные значения в.у. и н.у. настраиваются пневматическими задатчиками в виде давлений задания рз1 и рз2, соответственно в.у. и н.у. наполнения МЕ. При рз2=const давление рз1=var однозначно определяет заданный вес дозы. Для цилиндрической формы МЕ с площадью зеркала S вес дозы G определяется равенством G = S (Н1 – Н2) = S ΔН = S (рз2 - рз1).
Таким образом, при рз2=const вес дозы однозначно зависит от давления задания рз1 и не зависит от удельного веса жидкости , что позволяет проводить тарировку предлагаемой САД на водопроводной воде и дозировать самые разнообразные по физико-химическим свойствам жидкости, в том числе агрессивные, в широком диапазоне изменения величины дозы (практически от 3 до 30 кг).
Методика проектирования типовых САД для расфасовки жидких про-дуктов в тару строится с учетом наиболее часто встречающихся на практике типовых технологических схем подачи жидкости, а также с учетом физико-химических свойств дозируемых жидкостей, диапазонов дозирования и других факторов. Эта методика касается систем расфасовки с ручной установкой тары на позицию налива. Автоматизация процессов разлива на конвейерных линиях требует разработки индивидуальных САД, особенности проектирования и примеры построения которых представлены в главе 5.
Исходным материалом для проектирования САД является разработанная типовая форма технического задания (ТЗ) в виде таблиц 1 и 2, которая позволяет формализовать процедуру разработки САД и содержит всю необходимую информацию по ОУ, свойствам жидкости, типе тары и другим параметрам исходных данных (ИД).
Таблица 1. Типовая форма технического задания.
| ИСХОДНЫЕ ДАННЫЕ | ВАРИАНТЫ ОТВЕТА |
| Исполнение САД | С ручной установкой тары |
| Для конвейерной линии | |
| Тип конвейерной линии | Шаговый Непрерывный |
| Число каналов дозирования | Один Два Для линии: n = |
| Диапазон дозирования (мл) | От…………. До…………. |
| Время выдачи дозы | Минимальное Заданное: t=…с (для дозы…мл) |
| Точность дозирования | ± % от заданной дозы |
| Источник продукта | Ответ на этот вопрос дать в таблице 2 |
| Характеристика жидкости | Вязкость: Малая (жидкости типа воды); Средняя (жидкости типа подсолнечного масла) Высокая (более вязкие) |
| Пенящаяся Не пенящаяся | |
| Агрессивная Не агрессивная | |
| Пищевая Техническая Лекарство | |
| Характеристика тары | Тип, геометрические параметры |
Из приведенных в таблице 1 параметров ИД были выбраны три основных, в зависимости от сочетания которых может быть проведен рациональный выбор принципа отмеривания дозы и спроектирована соответствующая принципиальная схема типовой САД. Основными критериями для такого выбора являлись минимизация состава технологического оборудования системы, простота ее эксплуатации и обслуживания.
В качестве основных параметров ИД выбраны следующие: тип источника дозируемого продукта - А1 – А7 согласно таблице 2; диапазон дозирования делится на 3 группы - Б1 – малые дозы (до 100 мл), Б2 – средние (от 100 мл до 2 л), Б3 – большие (более 2 л); вязкость жидкости делится на три группы: малая - В1, средняя – В2 и высокая – В3.
Согласно предложенной методике, посредством анализа возможных (рациональных) сочетаний основных параметров ИД (Аi, Бj, Вk), которые получаются путем их последовательного перебора, производится выбор принципа отмеривания дозы, и, в зависимости от этого, по таблице 3 - выбор типа герметичного РР для работы под давлением, используемого при необходимости организации напорного истечения жидкости. При определенных сочетаниях параметров ИД расфасовку жидкости можно вести непосредственно из источника продукта; при этом РР не требуется.
Таблица 2. Источник дозируемого продукта.
| ИСТОЧНИК ПРОДУКТА | ОБОЗН. | ХАРАКТЕРИСТИКА |
| Сменная транспортировочная тара (ТТ) с дозируемым продуктом | А1 | Открытого типа (без возможности работы под давлением) емкостью до 20 л |
| А2 | Открытого типа емкостью более 20 л | |
| А3 | Герметичная (с возможностью работы под давл-ем до 0,6 кгс/см2), напр., металлические бочки напольного размещения | |
| А4 | Специальный стальной резервуар большой емкости с возможностью работы под давлением до 1,0 кгс/см2 | |
| Стационарный герметичный расходный бак (РБ) большой емкости | А5 | С установкой на высоте более 1 м от пола, например, стандартный полиэтиленовый кубитейнер емкостью 1 м3 с возможностью работы под давлением до 0,4 кгс/см2 |
| А6 | Напольного размещения, например, стандартный кубитейнер с возможностью работы под давлением до 0,4 кгс/см2 | |
| Стационарный РБ | А7 | Открытого типа большой емкости с установкой на высоте более 1 м от пола |