
Методические указания к курсовой работе по дисциплине «Теория автоматического управления»
| Вид материала | Методические указания |
Содержание2.3 Синтез САУ при регулярных воздействиях 2.4 Построение желаемой амплитудной характеристики САУ |
- Методические указания к подготовке курсовой работы по дисциплине «Экономическая теория», 991.55kb.
- Методические указания к курсовой работе по дисциплине «Управленческие решения», 145.2kb.
- Методические указания к курсовой работе для специальностей 220100 Вычислительные машины,, 87.91kb.
- Методические рекомендации для курсовой работы по «тау», 35.72kb.
- Методические указания к курсовой работе по дисциплине «численные методы», 134.12kb.
- Методические указания по написанию курсовой работы по дисциплине «Теория менеджмента», 225.99kb.
- Методические указания по выполнению курсовой работы для студентов 2 курса специальности, 105.84kb.
- Методические указания для выполнения курсовых работ по дисциплине «Теория организации», 322.88kb.
- Методические рекомендации по выполнению курсовых работ по дисциплине «Экономическая, 193.84kb.
- Методические указания по выполнению курсовой работы Ижевск, 289.74kb.
2.3 Синтез САУ при регулярных воздействиях
Сущность задачи синтеза заключается в таком выборе структурной схемы системы и её параметров, а также таком конструктивном решении, при котором обеспечиваются требуемые показатели качества и точности процессов регулирования, а сама система состоит из наиболее простых устройств управления. Всю систему автоматического регулирования можно разделить на две части: объект регулирования, исполнительное устройство, усилитель мощности и измерительное устройство – неизменяемая часть системы, и корректирующее устройство с согласующим усилителем – изменяемая часть системы. В значительной степени определяющими при выборе устройств неизменяемой части системы являются стоимость, надёжность, масса и габаритные размеры. Поэтому задачу синтеза системы автоматического регулирования обычно сводят к выбору лишь легко изменяемых устройств, а именно: усилительных и корректирующих устройств.
Пусть известны тип и параметры устройств, входящих в неизменяемую часть системы. Тогда синтез системы осуществляется в следующем порядке:
1. Составляют упрощённую структурную схему системы и выбирают схему и место включения корректирующих и усилительных устройств.
2. По критерию качества или требованиям на показатели качества и точности регулирования находят желаемую логарифмическую частотную характеристику разомкнутой системы.
3. Определяют тип и параметры корректирующих и усилительных устройств системы.
4. Находят конструктивное решение корректирующих и усилительных устройств системы и составляют окончательную структурную схему системы автоматического регулирования.
5. Определяют динамические характеристики системы и сравнивают их с соответствующими данными технических условий. Очевидно, принятый порядок синтеза может привести к неоднозначному решению задачи.
В САУ применяются корректирующие устройства последовательного или параллельного действия. САУ с последовательной коррекцией имеют большую частоту среза, что предъявляет высокие требования к динамическим характеристикам устройств неизменяемой части и к отсутствию в системе сигналов шумов и помех. Корректирующие устройства последовательного действия являются наиболее простыми, однако при выходе из строя конденсаторов или резисторов этого устройства вся система регулирования становится неработоспособной.
Параллельные корректирующие устройства снижают частоту среза системы и делают систему малочувствительной к помехам и шумам. Совместным включением последовательного и параллельного корректирующих устройств можно получить высококачественную систему автоматического регулирования.
2.4 Построение желаемой амплитудной характеристики САУ
Желаемая ЛАХ определяется показателями качества и точности процессов регулирования.
Низкочастотная её часть обусловливает точность воспроизведения медленно изменяющихся воздействий, по ней можно определить добротности по скорости и ускорению и статическую ошибку системы.
Частота среза системы определяется номограмм В.В. Солодовникова (рис. 3):
По
 определяем
определяем  , а по находим значение
, а по находим значение  . Затем при заданном
. Затем при заданном  определяем
определяем  .
.Для наиболее простой реализации последовательного корректирующего устройства изломы наклонов высокочастотного участка желаемой ЛАХ и ЛАХ неизменяемой части системы должны совпадать. Рассмотрим следующий пример.
Пример. Требуется построить желаемую ЛАХ следящей системы с астатизмом первого порядка по следующим данным:
Ошибка системы при заданных скорости и ускорении -
 ,
,  не должна превышать
не должна превышать  , т.е.
, т.е.  ; при ступенчатом единичном входном воздействии на систему
; при ступенчатом единичном входном воздействии на систему  и
и  c; неизменяемая часть системы имеет передаточную функцию вида:
c; неизменяемая часть системы имеет передаточную функцию вида: (12)
(12)где
 .
.Определим добротности системы по скорости и ускорению
 и
и  . Запишем ошибку следящей системы:
. Запишем ошибку следящей системы: (13)
(13)Первое слагаемое, называемое скоростной (кинематической) ошибкой, примем равным 3, второе, называемое динамической ошибкой – 15. Далее не составит труда определить добротности:
 .
. 
Если принять, что в области малых частот желаемая ЛАХ состоит из двух участков с наклоном
 и
и  , то
, то  и
и  определяются по:
определяются по: .
.Таким образом, получим низкочастотную часть желаемой ЛАХ (рис. 5). Для построения её среднечастотной части определим по номограммам (рис. 3) значение
 для заданного
для заданного  , а затем значение частоты среза
, а затем значение частоты среза  при заданном
при заданном  ; отложим значение на оси частот и проведём через эту точку среднюю часть желаемой ЛАХ, прямую с наклоном . Для построения высокочастотной части желаемой ЛАХ поступим следующим образом.
; отложим значение на оси частот и проведём через эту точку среднюю часть желаемой ЛАХ, прямую с наклоном . Для построения высокочастотной части желаемой ЛАХ поступим следующим образом.
На рисунке 5 нанесём ЛАХ неизменяемой части при
 .
.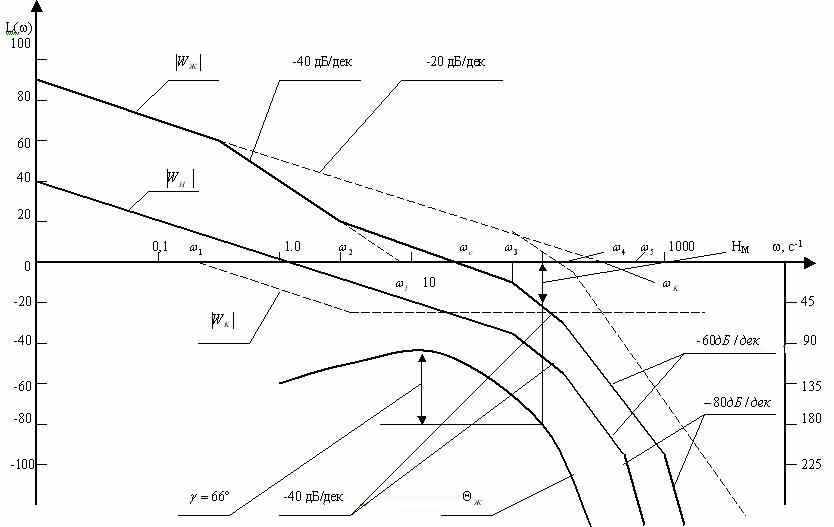

Р
 исунок 5 - Построение желаемой ЛАХ
исунок 5 - Построение желаемой ЛАХЛоманая
 , полученная по (12) при подстановке
, полученная по (12) при подстановке  . Для более простой реализации последовательного корректирующего устройства наклоны высокочастотной части желаемой ЛАХ примем равными наклонам ЛАХ неизменяемой части системы с теми же точками излома по частотам
. Для более простой реализации последовательного корректирующего устройства наклоны высокочастотной части желаемой ЛАХ примем равными наклонам ЛАХ неизменяемой части системы с теми же точками излома по частотам  ,
, ,
,
Вычитанием
 из
из  получим ЛАХ корректирующего устройства
получим ЛАХ корректирующего устройства  .
.Проверку правильности построения
выполним по фазовой частотной характеристике  , вычисленной в среднечастотной части:
, вычисленной в среднечастотной части: . (14)
. (14)Как видно, синтезированная по требованиям качества и точности процессов регулирования система имеет запас устойчивости по модулю
 . Полученные запасы устойчивости полностью обеспечивают заданное качество системы (табл. 4).
. Полученные запасы устойчивости полностью обеспечивают заданное качество системы (табл. 4).В ряде случаев в синтезируемых САР приходится уменьшать частоту среза
 ,например, по условиям качества при случайных воздействиях на систему. Тогда целесообразно строить желаемую ЛАХ с низкочастотной частью, имеющей
,например, по условиям качества при случайных воздействиях на систему. Тогда целесообразно строить желаемую ЛАХ с низкочастотной частью, имеющей  .
.В случаях, когда требуется повысит точность системы регулирования, целесообразно строить желаемую ЛАХ с наклонами
 т.е. увеличивать порядок астатизма, а далее - соответственно с наклонами неизменяемой части.
т.е. увеличивать порядок астатизма, а далее - соответственно с наклонами неизменяемой части.