
Системантика
| Вид материала | Монография |
Содержание2. Принятие решения и реализация действия Ф в расчетное положение Р Знание и информация |
2. Принятие решения и реализация действия
Следует различать стратегическое управление и оперативное управление, отличающиеся временем и пространством протекания процесса. Стратегические процессы требуют больше времени на изучение состояния системы и окружающей среды. Апогеем изучения является принятие решения на основе имеющихся знаниях о выборе цели и кинематической траектории движения к ней, которая включает в себя последовательность оперативных желаемых состояний системы.
Доминантой оперативного управления выступает реализация действий по ликвидации рассогласования между текущим, фактическим состоянием системы и желаемым состоянием на основе информации об их взаимном расположении. Управление предполагает принятие решения на основе полученной информации.
Для выяснения проходящих в системе функциональных процессов рассмотрим в самом общем виде рис. 21. Орган управления на основании информации о фактическом (f1) и заданной программой (f2) состоянии управляемого объекта принимает решения и формирует соответствующие команды управления объектом или команды корректировки программы. Система информационного обеспечения должна выдать органу управления сведения, необходимые для формирования цели и программы управления, а также о состоянии управляемых объектов и окружающей их среде.
Все входные и выходные данные блоков, показанные на рис. 21, условно можно обозначить некоторыми функциями времени протекания процессов управления.
Если развитие объекта управления осуществляется строго по программе, а внешние условия и внешние объекты, т. е. окружающая среда, не вызывают необходимости корректировать программу, то команда управления объектом (f) равна нулю.
Если же вследствие каких-то возмущающих факторов намечается рассогласование между фактическим и программным состояниями объекта управления, то в общем случае возможны два пути (см. рис. 22).
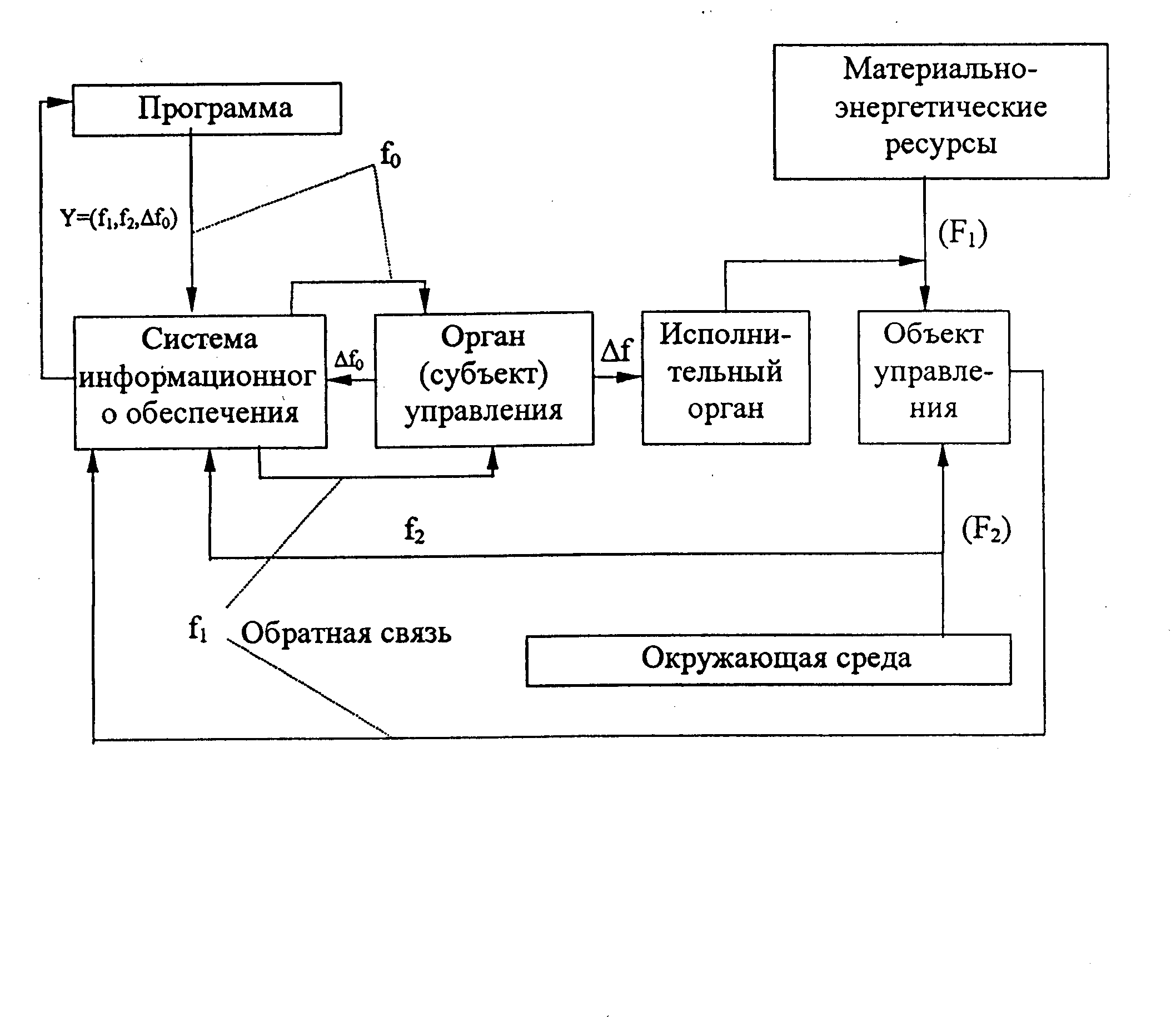
Рис. 21. Блок-схема системы управления
f0 – информация о желаемом состоянии объекта; f1 – информация о фактическом состоянии объекта; f – сигнал управления; f2 – информация об окружающей среде; F1, F2 – материально-энергетические каналы.
Первый путь состоит в переводе объекта управления из Ф в расчетное положение Р. При этом следует выбрать f и скорректировать вектор скорости V в соответствии с расчетным значением. В противном случае объект при дальнейшем движении опять будет отклоняться от заданного программой направления. Такое управление обеспечит развитие объекта по ранее заданной программе.
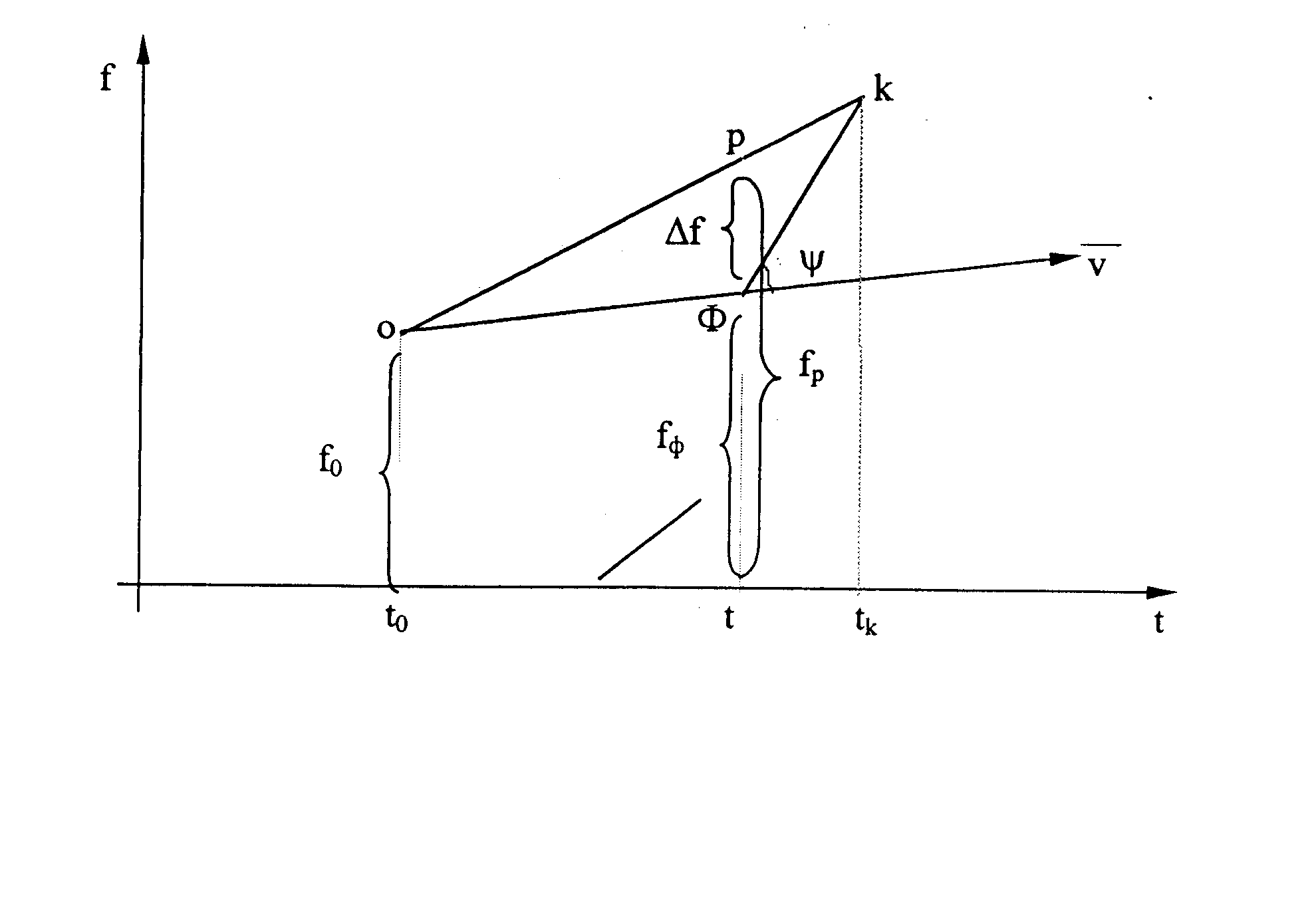
Рис. 22. Планирование и принятие решений
р – расчетное значение; ф – фактическое значение; f – рассогласование; – угол, на который надо повернуть вектор скорости, чтобы выйти к намеченной цели.
Второй путь состоит в изменении в положении Ф значений вектора скорости таким образом, чтобы объект вышел к намеченной цели, но при этом допускается возможность формирования некоторой новой программы.
Характеристика всякой системы управления представляет собой многомерную величину, зависящую одновременно от нескольких параметров. В некоторый момент времени t0 объект находится в состоянии, определяемом f0. Предположим, что изменение объекта происходит по линейной зависимости.
В произвольный момент времени t программное состояние объекта должно быть равно расчетной величине fр, а сам объект должен находиться в точке Р. Однако в действительности в момент времени t объект оказался в точке Ф. Фактическое его состояние характеризуется величиной fф. Таким образом, между программным (расчетным) и фактическим состоянием объекта обнаруживается рассогласование f = fр – fф. Обозначим обобщенный параметр управления через
где
 V – модуль скорости, с которой изменяется состояние объекта управления; – угол между вектором скорости и необходимым направлением движения к конечной точке.
V – модуль скорости, с которой изменяется состояние объекта управления; – угол между вектором скорости и необходимым направлением движения к конечной точке.В общем случае в процессе управления необходимо одновременно контролировать все три составляющих элемента параметра управления f,
 и . Однако могут быть и частные случаи вида:
и . Однако могут быть и частные случаи вида:q = q (f);
q = q();
q = q(V);
q = q(f, );
q = q(f,V);
q = q(,V).
Таким образом, для осуществления качественного управления в каждый момент времени нужно знать плановое и фактическое состояние объекта управления, выраженное в сопоставимых характеристиках и единицах измерения, и непрерывно приводить фактическое состояние объекта в соответствие с программным.
При скоротечных процессах в параметр управления необходимо вводить элемент, учитывающий ускорение.
Что касается центрального понятия «решение», то здесь не просматривается жесткого и однозначного определения понятия. Оно представляет (вне зависимости от сфер, в рамках которых используется), определенную мыслительную деятельность, совершаемую субъектом с целью уменьшения неопределенности, неточности, неоднозначности в сложившемся положении дел. «Размытость» этого понятия не означает проявления методологической слабости, а является следствием его междисциплинарного системного статуса.
Глава V
ЗНАНИЕ И ИНФОРМАЦИЯ