
Системантика
| Вид материала | Монография |
Содержание2. Функции самоорганизации 1. Управление и обратная связь |
2. Функции самоорганизации
Самоорганизация – это свойство системы изменять свою внутреннюю структуру и функции для адаптации к воздействию окружающей среды. Самоорганизация представляет собой эволюцию линейных и нелинейных превращений материального и идеального начал природы, непрерывного усложнения диссипативных структур вплоть до сверхсложных систем.
Она исходит из открытости мира, обеспечивающей контакт между любой системой и средой, необходимый для выработки их согласованного действия или собственного поведения путем выбора цели и формирования кинематической траектории. Но это только идеальная компонента, и этим самоорганизация не исчерпывается. Она включает в себя системную закрытость при реализации движения по кинематической траектории к идеальному.
Только динамический процесс, вызванный силовыми действиями, способен ликвидировать возникающие при движении рассогласования между желаемым состоянием системы, заданным кинематической траекторией, и фактическим ее состоянием. Именно это реактивное действие выполняется в системе на основе управления ее внутренними функциями со стороны субъекта. Внутренние функции самоорганизации и управления связаны со знанием, информацией, веществом и энергией. Это то предельное, чем располагает система.
Из этих функциональных элементов формируются диссипативные структуры – носители нового, они как бы заводят механизм хаоса, из которого рождается тенденция к порядку.
Сочетание открытости и закрытости иллюстрирует принцип дополнительности в самоорганизации и эволюции. Доминантой синергетики, с точки зрения самоорганизации, является изучение эволюционного пути развития систем на основе долгосрочных стратегических прогнозов и выбора кинематической траектории. Для этого и самоорганизующимся системам, и изучающей их синергетике нужны знания о прошлом, настоящем и будущем системы и среды, условиях и возможностях их взаимодействия.
В отличие от традиционного представления знания как результата познавательной деятельности человека, в семантической модели самоорганизующихся систем знание рассматривается как системная категория, выполняющая определенную функцию формирования идеального на основе наследственного и накопленного опыта как результата эволюционного процесса. В системном знании фиксируется опыт о прошлом, настоящем и возможном будущем и системы, и среды. На основании этих знаний формируются прогнозы будущего, которые определяют долгосрочные стратегические цели и кинематические траектории движения к ним.
Прогнозирование можно рассматривать как «опережающее» отображение, связанное с временным соотношением отображаемого и отображенного состояния системы (рис. 20).
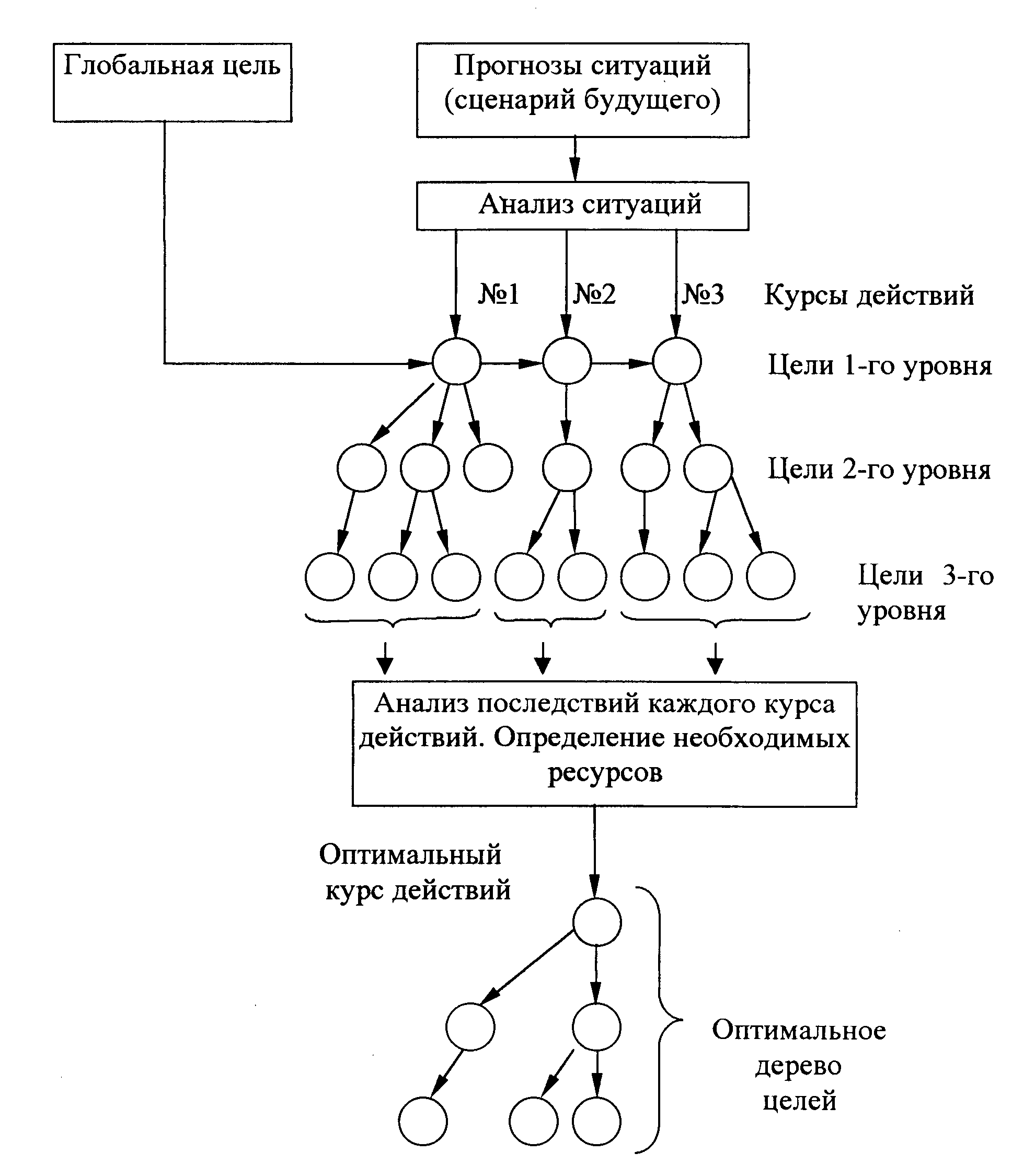
Рис. 20. Процесс прогнозирования
В прогнозе на основании объективных составляющих формируется сценарий будущего и учитывается глобальная цель, отображающаяся аттрактором, который может быть в пределе для всего мироздания определен в формулировке: мироздание перманентно стремится к идеалу (оптимуму) на всех уровнях своей организации, отражающей ее сущность и цель1.
Системная глобальная цель может быть выражена в терминах «существования» и «развития»2. На основании этих понятий выбираются курсы действий и строятся соответствующие деревья целей. Производится анализ последствий каждого курса действия и определяется необходимый ресурс для его реализации.
В результате этого анализа намечается наиболее приемлемый (оптимальный) курс действий, для которого выбираются окончательное дерево целей и маршруты кинематических траекторий.
«Мы вынуждены принять плюралистический мир, в котором обратимые и необратимые процессы сосуществуют»3 … «они охватывают изолированные системы, эволюционирующие к хаосу, и открытые системы, эволюционирующие к более высоким формам сложности»4.
Глава IV
САМООРГАНИЗАЦИЯ И УПРАВЛЕНИЕ
1. Управление и обратная связь
Кинематическая траектория представляет собой программу движения, развития системы. Ее реализация возможна только путем управления. Управление определяется как осуществление совокупности воздействий, выбранных из множества возможных на основании информации об отклонении реального состояния системы от определенного программой идеального состояния. Субъект в системе выступает в качестве управляющего механизма, результаты работы которого отражаются на изменении состояния объекта. Под объектом обычно понимается часть системы, на которую можно воздействовать, добиваясь осуществления цели.
Понятие «управление» в кибернетике охватывает любые системы с замкнутой обратной связью, обеспечивающей определенную логику выбора реакции системы на изменение условий ее работы.
Все многообразие окружающей нас действительности находится в постоянном взаимодействии. Поэтому устойчивость проходящих в природе и обществе процессов, обусловленная наличием сил, поддерживающих равновесие, играет огромную роль в существовании единого мира. Процессы в любой системе, предоставленной самой себе, либо со временем ослабевают, и система прекращает свое существование, либо неудержимо усиливаются и разрушают саму систему.
Подтверждением наличия таких регулирующих воздействий в живой природе являются деятельность генетического аппарата (слабейший погибает), эндокринной (воспроизводство клетки и развитие раковой опухоли) и нервной (реакция организма на холод, боль) систем, увеличение адреналина в крови при стрессовых ситуациях, изменение численности популяции при изменении количества пищи или врагов. В природе наиболее ярким примером могут служить процессы экологии. Очень наглядны эти воздействия в технике. Примером может служить разработка генераторов, усилителей, регуляторов.
В общем случае указанные воздействия называются обратной связью. Можно дать такое определение обратной связи (ОС): воздействие результатов процесса на его протекание, или воздействие управляемого процесса на управляющий, или воздействие результатов функционирования какой-либо системы (объекта) на характер этого функционирования.
По типу воздействия различают положительную и отрицательную обратные связи. Если результаты процесса усиливают его, то обратная связь является положительной; когда результаты процесса ослабляют его действие, то проявляется отрицательная обратная связь. Отрицательная обратная связь широко используется в замкнутых системах с целью повышения устойчивости (стабилизации), улучшения переходных процессов, понижения чувствительности. Положительная обратная связь применяется, напротив, для усиления выходного воздействия системы, ускоренного развития процессов, повышения чувствительности, усиления колебательных процессов, что приводит к ухудшению динамических характеристик. В сложных системах (социальных, биологических) определение типов обратной связи затруднено, а иногда и невозможно.
Обратные связи классифицируются в соответствии с природой тел и сред, посредством которых она осуществляется:
механическая (отрицательная обратная связь, осуществляемая регулятором Уатта в паровой машине);
оптическая (положительная обратная связь, осуществляемая оптическим резонатором в лазере);
электрическая (положительная и отрицательная ОС в электронных устройствах).
По виду преобразования в цепи обратные связи разделяют на:
жесткую, содержащую только пропорциональные звенья (ее воздействие пропорционально выходному сигналу объекта управления);
дифференцирующую, содержащую дифференцирующие звенья (ее воздействие пропорционально производной выходного сигнала объекта управления; проявляется в динамических процессах);
интегрирующую, содержащую интегрирующее звено (накапливает со временем поступающее воздействие);
запаздывающую, содержащую линии задержки.
В радиоэлектрических устройствах применима формула:
Fс = F0/(1 – BF0),
где Fс – функция передачи устройства с ОС; F0 – функция передачи устройства без ОС; B – функция передачи цепи ОС; BF0 – петлевое усиление; 1 – BF0 – глубина ОС. Если BF0 > или = 1, то возникают автоколебания (применяют при конструировании генераторов).
Обратная связь в системах автоматического регулирования и управления – это связь в направлении от выхода к входу рассматриваемого участка основной цепи воздействий (передачи информации). Этим участком могут быть как управляемый объект, так и любое звено автоматической системы (либо совокупность звеньев). Обратная связь образует путь передачи воздействий в дополнение к основной цепи воздействий или какому-либо ее участку.
Если обратная связь органически присуща объекту управления, ее называют внутренней. Если обратная связь возникает непреднамеренно, ее называют паразитной.
Системы, в которых входным воздействием являются как внешние воздействия, так и воздействия ОС, называются замкнутыми системами управления. В системах управления могут существовать устройства, которые по определенному алгоритму преобразовывают выходной сигнал объекта управления, сравнивают его с предписанным значением, и на основании этого сравнения вырабатывают управляющее воздействие на управляемый объект. Такая обратная связь обычно называется главной.
Иногда в сложных системах обратную связь рассматривают как передачу информации о протекании процесса, на основании которой вырабатывается то или иное управляющее воздействие. В этом случае обратную связь называют информационной. Понятие обратной связи как формы взаимодействия играет важную роль в анализе функционирования и развития сложных систем управления в природе и обществе, в раскрытии структуры материального единства мира.