
Міністерство освіти І науки України Національний університет “Львівська політехніка”
| Вид материала | Автореферат |
- Міністерство Освіти І Науки України Національний університет “Львівська політехніка”, 2021.84kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1080.17kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1068.44kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1259.1kb.
- Національний університет «львівська політехніка» алзаб аєд хамдан, 385.08kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1563.62kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 208.38kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 723.06kb.
- Міністерство освіти І науки України Національний університет "Львівська політехніка", 526.12kb.
- Міністерство освіти І науки України Національний університет "Львівська політехніка", 305.54kb.
а) б) в)
Рис.16. Усталений періодичний режим в неавтономному ФАПЧ з шумом.
За малих рівнів шуму та індексів модуляції на розмах орбіти усталеного руху характерного перетину (рис. 16 а) впливає тільки індекс модуляції, а на його розмір – тільки інтенсивність шуму. Торкання еліпсом вхідної сепаратриси через зростання розміру або розмаху орбіти свідчить про зрив синхронізму. За більших рівнів збурень характерною особливістю періодичних розв’язків є те, що впродовж періоду модулювального збурення змінюється і середнє значення (потовщена лінія на рис. 16 б) і СКВ похибки. Порівняння СКВ фазової похибки за наявності кутової модуляції (крива 1 на рис. 16 в) та за її відсутності (пряма 2) показує, що збільшення індексу модуляції за незмінного рівня шуму суттєво (до 7 разів) збільшує пікові значення СКВ похибки. Отже, отримана математична модель (9) дає можливість аналізувати одночасну дію шумової завади та кутової модуляції і виявляти ефекти, недоступні іншим методам.
Аналогічні особливості усталених періодичних рухів виявив також аналіз статистичної динаміки ФАПЧ за наявності фазової маніпуляції (рис. 17).
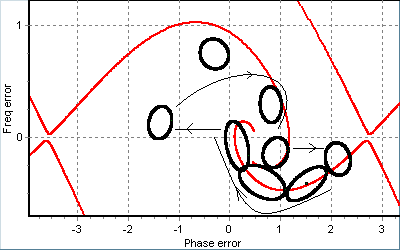
 Рис.17. Усталений періодичний режим за наявності фазової маніпуляції.
Рис.17. Усталений періодичний режим за наявності фазової маніпуляції.
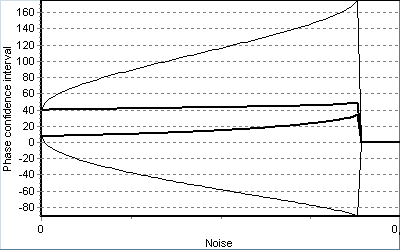
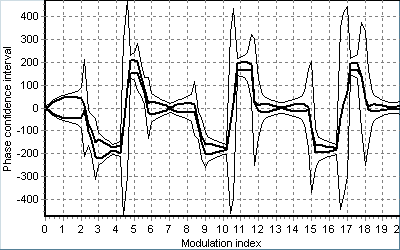
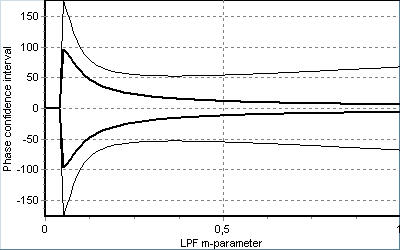
Зміни характеристик усталених періодичних розв’язків системи (9), викликані змінами параметрів збурень та пристрою, зображено на рис. 18, де потовщеними лініями відмічений розкид середнього значення за період модуляції, а тонкими – довірчий інтервал фазової похибки (абсциси граничних точок еліпса). Наближення до межі існування синхронного режиму викликає різке зростання СКВ фази незалежно від того, яким параметром це наближення викликано. Залежність від рівня шуму 1/ (рис. 18 а) показує, крім числових значень статистичних характеристик фазової похибки, граничну завадостійкість, що дає можливість оптимізувати параметри пристрою за критерієм максимуму допустимого рівня шуму. Залежність від індексу модуляції μ (рис. 18 б) показує зміни фази основної гармоніки модульованого коливання на ±180° та помітні викиди СКВ фазової похибки, коли гармоніка носійної частоти має близьку до нуля амплітуду. Залежність від параметру m ПІФ (рис. 18 в) має мінімум, що уможливлює оптимізацію за відомим критерієм мінімуму СКВ, крім того, ця залежність показує неможливість синхронізму за деяких значень параметрів (m<0,05).
а) б) в)
Рис.18. Залежності довірчого інтервалу фазової похибки від рівня шуму (а),
індексу модуляції (б) та параметру m ПІФ (в).
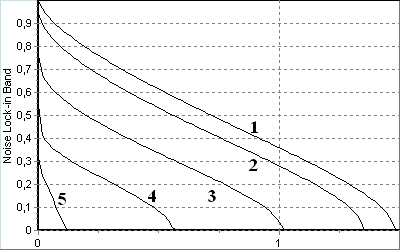
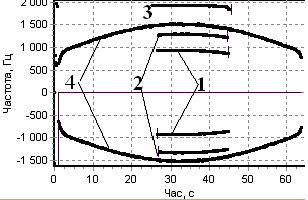
На рис. 19 наведено залежності шумових смуг утримання (рис. 19 а) і схоплення (рис. 19 б) від параметру 1/ (відношення шум/сигнал в смузі ФНЧ) при значеннях індексу модуляції = 0; 0,5; 1,0; 1,5; 2,0 (криві 1..5 відповідно). Характерною особливістю ШСУ та ШСС є монотонне звуження як з ростом шуму, так і з ростом індексу модуляції. Це обмежує можливість збільшення вихідного відношення сигнал/шум шляхом збільшення індексу модуляції. Різке звуження смуг (особливо ШСС) в області малих шумів показує неможливість за наявності шуму використовувати результати, відомі для детермінованих ФАПЧ.
а)
 б)
б)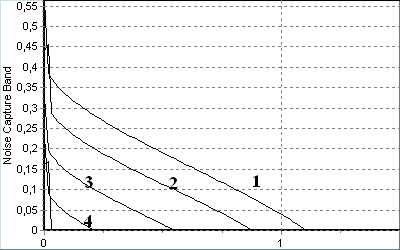
Рис.19. Залежності ШСУ (а) та ШСС (б) від рівня шуму за різних індексів модуляції.
Залежності, наведені на рис. 18 і 19, отримані за допомогою спеціально розробленої програми, яка здійснює інтегрування системи рівнянь (9) та автоматичну зміну одного (рис.18) або двох (рис. 19) параметрів. Ця програма була використана для оптимізації параметрів ФАПЧ за критерієм максимальної завадостійкості. Вихідними даними для оптимізації за цим критерієм є тільки параметри модуляції (прийнято γМ=0,02 та μ=10). Отримані оптимальні значення параметрів (m=0,230; β=0,013) забезпечують максимально допустимий рівень шуму 1/βρ=2,8. Для порівняння були також розраховані значення параметрів, оптимальні за критерієм мінімуму СКВ, який вимагає додатково задавати апріорне значення рівня шуму. Отримані значення (m=0,242; β=0,101 для 1/βρ=0,1 та m=0,115; β=0,016 для 1/βρ=4,0) суттєво відрізняються від рекомендацій розробленої програми. На рис. 20 наведені графіки ШСУ для всіх трьох наборів параметрів, порівняння яких показує, що нелінійний синтез програє малошумовому лінійному біля 20% допустимої розстройки за малих рівнів шуму, але виграє 25% по завадостійкості. Виграш нелінійного синтезу порівняно з сильно шумовим лінійним по завадостійкості лише 5%, але по граничній розстройці сягає 25..50%. Крім того, відсутність необхідності апріорно задавати рівень шуму значно полегшує задачу проектування порівняно з лінійним методом, нечутливим до порогу завадостійкості.
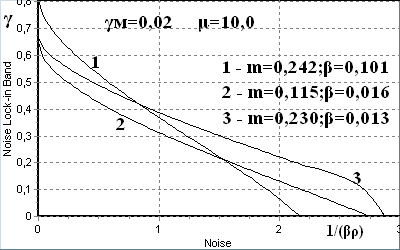

| Рис. 20. Залежність ШСУ від рівню шуму за умови лінійної (1, 2) та нелінійної (3) оптимізації параметрів. | Рис. 21. Вибір смуги утримання за критерієм максимального діапазону стеження. |
Розроблена програма дає можливість оптимізувати параметри пристрою ще за одним критерієм, недоступним для лінійного методу, – за максимумом діапазону стеження. На рис. 21 наведені залежності частотного діапазону стеження від смуги утримання FУА незбуреної ФАПЧ. За відсутності ФМ (μ=0) малі смуги утримання (до 500 Гц) використовуються практично повністю. Але при значному розширенні FУА (більше 12 кГц) діапазон стеження спадає до нуля через вплив шуму. Рекомендованим значенням коефіцієнта підсилення петлі ФАПЧ є FУА =8 кГц (досягнутий діапазон 1,7..2,2 кГц в залежності від значення μ). Для порівняння на рис. 21, крім точок максимуму діапазону стеження, відмічені точки мінімальної фазової похибки та значення СКВ фази для γ=0, які показують, що критерій максимального діапазону програє 10°..15° по якості синхронізації, але виграє в 2..3 рази по діапазону стеження.
Отже, з використанням кумулянтної математичної моделі (9) виявлені нові особливості статистичної динаміки ФАПЧ під дією комбінованих збурень, зокрема змінність в часі СКВ фазової похибки та його залежність від індексу модуляції. Розроблена програма аналізу математичної моделі (9) дає можливість проектувальнику оптимізувати параметри пристрою як за відомим критерієм мінімуму СКВ фазової похибки, так і за критеріями максимуму допустимого рівня шуму і максимуму діапазону стеження.
У п’ятому розділі роботи обґрунтована та досліджена структурна модифікація пристрою ФАПЧ, спрямована на усунення основного джерела порогового обмеження завадостійкості, а саме – обмеженості робочої ділянки детекторної характеристики ФД. Зрив синхронізму відбувається, коли сумарна похибка синхронізації (статична, динамічна і шумова) виходить за межі цієї робочої ділянки (±π/2). На етапі проектування це викликає необхідність пошуку компромісу між завадостійкістю (статистична складова похибки) та динамічними властивостями пристрою (динамічна складова).
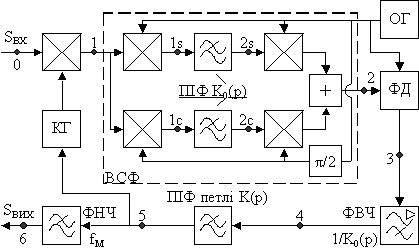 |
| Рис. 22. Структурна схема модифікованого пристрою ФАПЧ. |
 . (10)
. (10)Покладемо, що ФД має трикутну характеристику і максимальний рівень вихідної напруги UФД, а крутість характеристики керованого генератора становить S. Тоді максимальне відхилення частоти КГ (смуга утримання автономного пристрою) становить ΩУА=S∙UФД. Нехай також сигнали на виході опорного генератора (ОГ) SОГ, на виході КГ SКГ, і вхідний сигнал SВХ(t) становлять
SОГ(t)=sin(ωОГt), SКГ(t)=sin[(ω0КГ–Su5)t+φКГ],
SВХ(t)= S0(t)=cos(ω0t+φ0(t)+φn(t)). (11)
В (11) позначено: ω0КГ, φКГ – власна частота і початкова фаза КГ; ω0– носійна частота, φ0(t)=μ sin(Ωt) – модулювальна складова фази сигналу; μ – індекс, Ω– частота модуляції; φn(t) – перерахована у фазовий шум канальна шумова завада; u5 – керуюча напруга КГ (точка 5 на рис.22). Позначимо також ΩП=ω0–(ω0КГ+ωОГ) – відхилення носійної частоти SВХ від очікуваної (ω0КГ+ωОГ), тобто початкова розстройка частот; ω=ΩП–Su5 – миттєва частотна похибка синхронізації з носійним сигналом; φ(t)=(ΩП+ Su5)t –φКГ – миттєва фазова похибка синхронізації з носійним сигналом; φ1(t)=φ(t)+φ0(t)+φn(t) – фазовий зсув сигналу на вході ВСФ відносно опорного генератора; φ2(t)– різниця фаз сигналів на входах ФД. За таких позначень сигнал на вході ВСФ в усталеному режимі має частоту ωОГ, а його фаза становить φ1(t). За умови ΩП=0 і відсутності шуму напруги на входах фільтрів квадратурних каналів (точки 1s та 1с на рис 22) становитимуть
u1S(t)=sin φ= sin (μ sin Ωt); u1C(t)=cos φ= cos (μ sin Ωt), (12)
і при індексах модуляції μ<π/2 можна вважати, що спектри цих сигналів містять постійну складову U1C0 і по одній гармоніці частоти модуляції з амплітудами U1SM, U1CM:
u1S(t)= U1SM sin Ωt; u1C(t)= U1C0+U1CM cos (2 Ωt). (13)
Сигнал на виході ВСФ матиме частоту ωОГ, а його фаза, з огляду на (10), становитиме
 , (14)
, (14)а для випадку Ω>>1/T0, тобто при виборі смуги пропускання ПІФ меншою від частоти модуляції, вираз (14) набуває вигляду
 . (15)
. (15)При дуже малих індексах модуляції (
 ) можна вважати u1S(t)≈μ sin(Ωt), u1C(t)≈1, tg μ≈sin μ≈μ, і вираз (15) перетворюється на
) можна вважати u1S(t)≈μ sin(Ωt), u1C(t)≈1, tg μ≈sin μ≈μ, і вираз (15) перетворюється на , (16)
, (16)тобто в лінійному наближенні коефіцієнт передавання фази ВСФ збігається з коефіцієнтом передавання напруги ПІФ квадратурних каналів. Використання пропорційно - диференціюючого фільтра з коефіцієнтом передавання
 (17)
(17)в якості коректуючого ФВЧ забезпечує тотожну рівність одиниці коефіцієнта передавання „фаза вхідного сигналу – напруга U4” в лінійному режимі. Це означає, що динамічні властивості і фільтруюча здатність модифікованого пристрою будуть такими ж, як і у класичного ФАПЧ, у якому відсутні ВСФ та ФВЧ. Але порогові явища, викликані виходом за межі робочої ділянки характеристики ФД, проявляться за значно більших викидів різниці фаз φ(t), оскільки, як видно з (15) у модифікованому пристрої ці викиди зменшуються приблизно в 1/m0 разів.
У лінійному наближені отримана аналітична оцінка можливого підвищення завадостійкості, яке становить 1/m0 для високочастотних (порівняно зі смугою ВСФ) завад та
 (де β0=1/ΩУАT0 – нормована смуга ВСФ) для широкосмугових завад. Це підвищення обмежене лише власними шумами квадратурних каналів ВСФ.
(де β0=1/ΩУАT0 – нормована смуга ВСФ) для широкосмугових завад. Це підвищення обмежене лише власними шумами квадратурних каналів ВСФ.Для аналізу нелінійних явищ у модифікованому ФАПЧ була розроблена його математична модель у вигляді такої системи алгебраїчних та диференціальних рівнянь:
 (18)
(18)У системі рівнянь (18) індекси змінних відповідають точкам на схемі рис. 22, всі напруги нормовані до напруги UФД. Впроваджені змінні
y2S=u2S–m0u1S, y2C=u2C–m0u1C, y4=m0u4–u3, y5=u5–m0u4
є визначальними змінними лінійних фільтрів, які описують стан реактивних елементів цих фільтрів. Параметри α=1/T та α0=1/T0 – смуги пропускання ПІФ петлі та каналів ВСФ відповідно, F(φ2) – детекторна характеристика ФД.
Отримані числовим інтегруванням (18) усталені періодичні розв’язки для випадку розімкненої петлі керування та індексу модуляції μ=1,8 рад подані на рис. 23 у вигляді осцилограм напруги u4(t). У класичному ФАПЧ (крива 1) спостерігається обмеження вершини сигналу при виході за лінійну ділянку характеристики ФД, а у модифікованому (крива 2) форма сигналу практично зберігається, нелінійні спотворення проявляються у несиметричності кривої поблизу екстремумів та постійному фазовому зсуві.
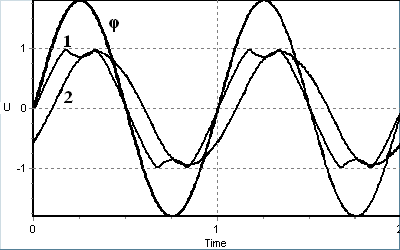 |  |
| Рис. 23. Нелінійні спотворення в класичному (1) і модифікованому (2) ФД. | Рис. 24. АЧХ „фаза сигналу 1 – – напруга U4”. |
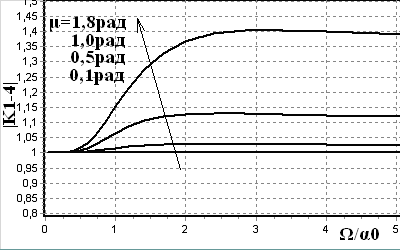
На рис. 24 наведені АЧХ коефіцієнту передавання „фаза сигналу 1 – напруга U4”, отримані за допомогою нелінійної моделі (18) для випадку розімкненої петлі керування та різних значень індексу модуляції. Як видно з рисунку, зі зростанням індексу і частоти модуляції цей коефіцієнт може значно (до 1,4 рази) відхилятися від постійного значення, розрахованого у лінійному наближенні.
Результати нелінійного аналізу процесів у замкненій петлі ФАПЧ за наявності початкової розстройки γ=ΩП/ΩУА=0,5, фазового шуму φn(t) з СКВ σ=0,1 рад та кутової модуляції з індексом μ=1 рад наведено на рис. 25.
| а)  б) 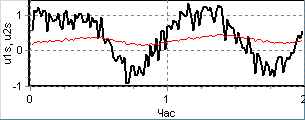 в) 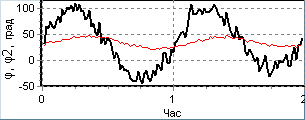 | г) 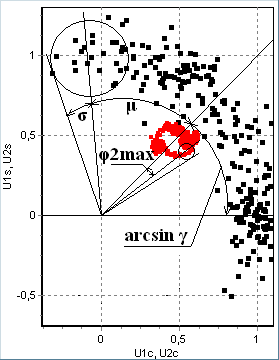 |
Рис. 25. Осцилограми (а, б) та фазовий портрет (г) квадратурних складових напруг на входах (темні лінії) та виходах (світлі) ВСФ та осцилограма фаз (в) цих напруг.
Осцилограми напруг (рис. 25 а,б) показують зменшення як амплітуди квадратурних складових так і СКВ шуму приблизно в 1/m0=10 разів, що є результатом проходження через ПІФ з вузькою смугою (α0=0,1 ΩУА). Анологічне зменшення спостерігається і для фаз сигналів на вході і виході ВСФ (рис. 25 в). Більш наочно співвідношення напруг і фаз, а також складових фазової похибки, представлено у вигляді квадратурних складових напруг на фазовій площині (рис. 25 г), з якого видно, що повна фазова похибка φ1(t) на вході ВСФ складається зі статичної (arcsin γ), спричиненої розстройкою частот сигналу і КГ; динамічної (μ), викликаної кутовою модуляцією, та статистичної (σ), викликаної випадковою завадою. Параметри пристрою і завад підібрано в такий спосіб, щоби максимальний викид повної фазової похибки φ1(t) був більшим границі однозначності характеристики ФД (π/2). Після проходження ВСФ статична складова фазової похибки φ2(t) не змінюється порівняно з φ1(t), а динамічна і шумова зменшуються відповідно до виразів (14, 15, 16). Це означає, що окремі складові фазової похибки синхронізації можна значно збільшувати, а різниця фаз сигналів на входах ФД залишатиметься у межах робочої ділянки характеристики (±π/2). Наприклад, за відсутності кутової модуляції (μ =0), при фіксованій інтенсивності шуму можна збільшити діапазон стеження (статичну похибку), або при фіксованій розстройці частот збільшити граничну інтенсивність шуму (статистичну похибку).
Шляхом повного перебору можливих значень параметрів ВСФ та ФВЧ встановлено, що за відсутності початкової розстройки (γ=0) та модуляції (μ =0) максимальне досяжне збільшення завадостійкості ФАПЧ з інтегруючим фільтром (m=0) становить від 1,5 до 3,5 разів (4-10 дБ), а безфільтрового ФАПЧ (m=1) – 5..8 разів (14-18 дБ).
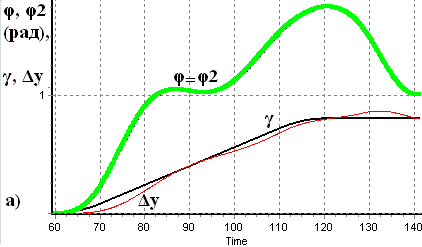
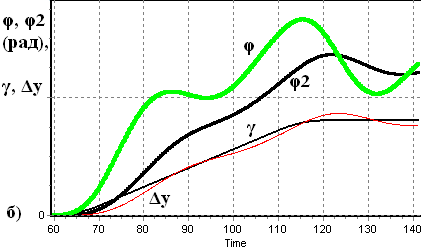
Рис. 26. Стеження за змінною частотою в класичному (а) і модифікованому (б) ФАПЧ.
Дослідження динамічних властивостей модифікованого пристрою за відсутності шуму та порівняння їх із властивостями класичного ФАПЧ було здійснено моделюванням стрибкоподібної та неперервної зміни початкової розстройки за нульових початкових умов, а також фіксованої розстройки за початкових умов, значно віддалених від стану рівноваги. Результати моделювання наведено на рис. 26.
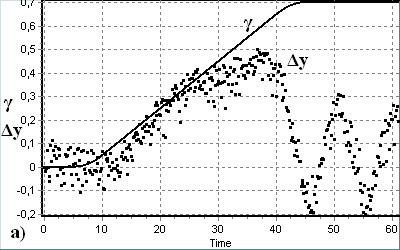
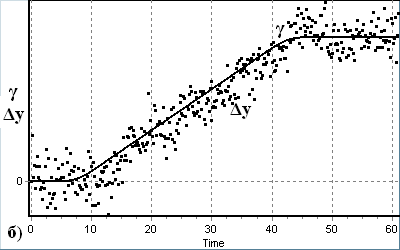

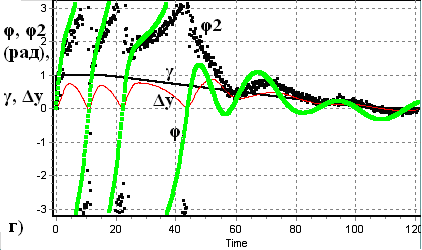
Рис. 27. Процеси утримання (а, б) і схоплення (в, г) змінної носійної частоти
за наявності шуму у класичному (а, в) і модифікованому (б, г) пристроях.
За неперервної зміни початкової розстройки (γ=ΩП/ΩУА), як видно з рис. 26, нормоване відхилення частоти КГ (Δy=Su5/ΩУА) збігається з відхиленням носійної частоти (γ) з практично однаковою похибкою, похибка φ стеження за фазою сигналу у модифікованому ФАПЧ дещо менша, а різниця фаз φ2 на входах ФД майже вдвічі менша, ніж у класичному пристрої. Це свідчить про більший запас стійкості синхронізації у модифікованому пристрої. Перебором параметрів ВСФ та ФВЧ виявлена область їх значень, за яких модифікований пристрій ФАПЧ є глобально стійким, тобто стаціонарний розв’язок моделі (18) встановлюється за будь-яких початкових умов, а смуга схоплення пристрою дорівнює його смузі утримання.
Результати моделювання процесу стеження за змінною носійною частотою з урахуванням впливу шумової завади (рис. 27) показали, що статистична і динамічна похибки синхронізації у модифікованому ФАПЧ практично такі ж самі, як і у класичному, але смуги утримання і схоплення є значно ширшими.
Отже, проведені дослідження модифікованого пристрою ФАПЧ (рис.22) показали, що його застосування значно підвищує завадостійкість синхронізації зі збереженням динамічних властивостей.
Шостий розділ дисертаційної роботи присвячений застосуванню розроблених методів підвищення завадостійкості у типових задачах радіолокації, зв’язку та навігації.
 |
| Рис. 28. Похибки стеження за частотою відбитого сигналу за різних значень параметрів ФАПЧ. |
Похибка стеження модифікованого пристрою ФАПЧ також наведена на рис.2 (крива 4). Як видно з результатів моделювання, модифікований пристрій забезпечує стеження за носійною частотою відбитого сигналу в усьому заданому діапазоні частот. Схоплення стеження відбувається при частоті сигналу 38,75 кГц. Отже, використання модифікованого пристрою ФАПЧ забезпечує стеження за частотою сигналу у складній завадовій обстановці без збільшення енергетичних параметрів сигналу.
Задача проектування на основі ФАПЧ другого порядку завадостійкого синхронного фазового детектора (СФД) сигналу з кутовою модуляцією була розв’язана у припущенні про застосування фазової модуляції однотональним коливанням з частотою М=2·5кГц та індексом, = 3,3, що є наближеним до параметрів сигналу широкомовних ЧМ станцій. Вибір значення параметрів ФАПЧ (УА, та m) проведено за критерієм узгодження огинаючої дискретного спектру модульованого сигналу S(ω) і АЧХ ФАПЧ W1(ω), яку у лінійному наближенні задає вираз
 ,
,де
 – КЧХ ПІФ петлі керування. Смуга утримання автономної ФАПЧ (УА) має приблизно дорівнювати девіації частоти модульованого сигналу, тобто УА ≈ М. Форма АЧХ
– КЧХ ПІФ петлі керування. Смуга утримання автономної ФАПЧ (УА) має приблизно дорівнювати девіації частоти модульованого сигналу, тобто УА ≈ М. Форма АЧХ  залежить від ширини смуги =1/T та коефіцієнта m ПІФ і є неперервною функцією частоти. Результати узгодження АЧХ СФД і спектра ЧМ сигналу зображено на рис. 29.
залежить від ширини смуги =1/T та коефіцієнта m ПІФ і є неперервною функцією частоти. Результати узгодження АЧХ СФД і спектра ЧМ сигналу зображено на рис. 29. 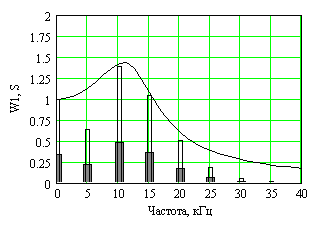 | 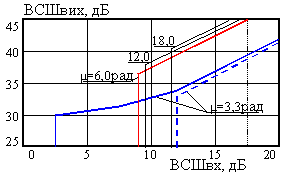 |
| Рис. 29. Узгодження АЧХ СФД (W1) зі спектром ЧМ сигналу (S) при індексі модуляції = 3,3 рад. | Рис. 30 Залежності вихідного відношення сигнал - шум від вхідного у класичному (штрихова) та модифікованому ФАПЧ. |
Для зручності порівняння на рис. 29, крім відносних амплітуд гармонік сигналу з кутовою модуляцією (темні стовпчики), нанесені їх масштабовані значення (світлі стовпчики). Синтезовані значення параметрів УА, та m, котрі реалізують квазіоптимальну АЧХ, наведено в табл. 1. Там же вказані параметри ВСФ та ФВЧ модифікованого пристрою ФАПЧ (рис. 22), які дозволяють здійснювати приймання сигналу з більш глибокою кутовою модуляцією.
Крива завадостійкості синтезованого пристрою зображена на рис. 30 штриховою лінією і добре узгоджується з відомими з літератури характеристиками оптимального приймача ЧМ сигналу.
Таблиця 1.
Синтезовані значення параметрів та показники завадостійкості СФД
| Базовий індекс модуляції, рад | 3,3 |
| Смуга утримання FУА, кГц | 32,0 |
| Смуга ФНЧ (α/2=1/2T), кГц | 5,0 |
| β=1/(2TFУА) | 0,156 |
| m | 0,16 |
| Смуга ВСФ та ФВЧ (α0/2=1/2T0), Гц | 3500 |
| m0 | 0,06 |
| Мінімальний енергетичний потенціал сигналу класичного СФД П, кГц | 96 |
| Мінімальний енергетичний потенціал сигналу модифікованого СФД П, кГц | 24 |
| Порогове ВСШ у смузі М, відн. од. / дБ | 19,05/12,8 |
Суцільною лінією на рис. 30 показана аналогічна крива для модифікованого пристрою ФАПЧ та індексу модуляції μ=3,3 рад, яка ілюструє можливість значного зниження порогу завадостійкості. Крім того, у модифікованому пристрої ФАПЧ існує можливість приймання широкосмугового ЧМ сигналу (μ=6,28 рад; 12 рад; 18 рад) пристроєм з вузькою ефективною смугою. Велика динамічна похибка, яка при цьому виникає, буде зменшена ВСФ і не призведе до зриву синхронізму. Проведене моделювання модифікованого ФАПЧ показало можливість збільшення завадостійкості приймання сигналів з кутовою модуляцією. Без зміни стандарту модуляції, тобто при використанні ЧМ сигналу з індексом модуляції μ=3,3 рад, модифікований СФД дає можливість знизити шумовий поріг (тобто збільшити чутливість приймача) на 10 дБ. Якість вихідного сигналу погіршується з ростом інтенсивності шуму, але синхронний режим зберігається. За умови зміни стандарту модуляції ЧМ сигналу зі збільшенням індексу модуляції до μ=6,28 відношення сигнал-шум на виході модифікованого СФД збільшиться на 8 дБ без збільшення енергетичних параметрів сигналу на вході приймача. Подальше збільшення індексу модуляції до 12-18 рад збільшує ВСШ на виході ще на 1-2 дБ і є недоцільним.
Наступною задачею, розглянутою у дисертаційній роботі, є застосування розроблених методів підвищення завадостійкості до проектування оптимального приймача цифрових радіосигналів. Цифрові радіосигнали з фазовою маніпуляцією широко застосовують у сучасних системах радіонавігації. Одною з основних проблем приймання цих сигналів є наявність шумового порогу детектора, особливо за неможливості збільшення потужності сигналу. Наприклад, у системах супутникової навігації, внаслідок віддаленості космічного апарату КА (висота геосинхронної орбіти КА системи GPS становить 20 240 км) та обмеженої потужності передавача КА, потужність цифрового радіосигналу, прийнятого на всеспрямовану антену поблизу поверхні Землі, становить від –165 до –160 дБ Вт, що суттєво обмежує функціональні можливості системи.
Невіддільною складовою приймача цифрового радіосигналу є схема стеження за носійною частотою (ССН), яка відслідковує допплерівські відхилення частоти сигналу і забезпечує синхронний режим роботи інших схем приймача. Зменшення потужності сигналу внаслідок затінення антени або роботи у закритих приміщеннях у першу чергу порушує синхронізм ССН, що викликає необхідність повторного входження у зв’язок, яке триває 5..20 хвилин. Отже, підвищення завадостійкості ССН приймача цифрових радіосигналів значно підвищить його експлуатаційні характеристики.
ССН сучасної АС є фактично синхронним фазовим детектором, побудованим на основі пристрою ФАПЧ. В роботі проведено імітаційне моделювання такого детектора за припущень щодо параметрів пристрою та цифрового радіосигналу, характерних для приймачів системи GPS. Зображені на рис. 31 результати імітаційного моделювання показали, що за однакових рівнів завад пристрій рис. 22 має суттєво кращі характеристики утримання і схоплення, ніж класичний детектор (світлі лінії).
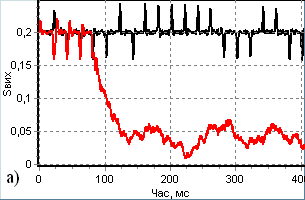
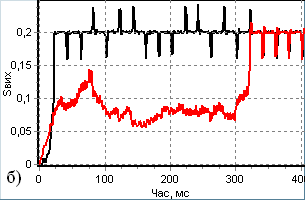
Рис. 31. Процеси утримання (а) і схоплення (б) цифрового радіосигналу у класичній (світлі лінії) та модифікованій (темні) ССН.
Час схоплення для різних реалізацій та за різних значень параметрів модифікованого пристрою становить від 3 мс до 20 мс. Час схоплення синхронізму у класичному ФАПЧ за тих самих умов становить 300..700 мс, тобто є на 1-2 порядки більшим. За прийнятих значень параметрів ФАПЧ та енергетичному потенціалі сигналу 20 дБ Гц смуга схоплення модифікованого ССН становить 5 100 Гц, порівняно із 1 170 Гц у класичної ССН із номінальним значенням енергетичного потенціалу 30 дБ Гц.
Досліджений пристрій зберігає здатність утримувати носійну частоту цифрового сигналу в режимі фазової синхронізації при енергетичному потенціалі на вході 16 дБ Гц, а здатність до детектування цифрового сигналу із задовільною імовірністю пропущених бітів – при 20 дБ Гц, що відповідно на 8 дБ Гц та 4 дБ Гц нижче, ніж пороги інформаційного та навігаційного режимів у відомих з літератури приймачів сигналів супутникової навігації.
Таким чином, застосування запропонованого пристрою (рис. 22) та розроблених у роботі методів вибору його параметрів дає можливість технічної реалізації приймання цифрового радіосигналу зі значно меншим енергетичним потенціалом та скорочення часу входження в синхронізм ССН цифрового радіоприймача.
У додатках до роботи наведені виведення використаних математичних моделей, запроваджені у роботі означення та доведена теорема, описи інтерфейсів розробленого програмного забезпечення, акти впровадження результатів дисертаційних досліджень.
Основні результати І Висновки
Основним результатом дисертаційної роботи є теоретичне обґрунтування та нове розв’язання науково-прикладної проблеми розробки методів підвищення завадостійкості пристроїв синхронізації зі збереженням їх динамічних властивостей.
До найважливіших теоретичних та практичних результатів можна віднести такі:
1. Виявлено тенденції актуального розвитку методів аналізу та оптимального синтезу завадостійких пристроїв фазової синхронізації; сформульовано нові наукові задачі, що випливають з теорії оптимальної нелінійної фільтрації, теорії марковських процесів та теорії коливань. Для реалізації поставлених задач необхідним є подальший розвиток теорії у напрямку усунення неузгодженості методів аналізу випадкових та детермінованих збурень та розробка методів оптимального синтезу, які усувають протиріччя між динамічними властивостями та завадостійкістю пристрою.
2. Розвинуто теорію статистичного представлення випадкових процесів у стохастичних динамічних системах. Вперше запропоновано описувати статистичну динаміку таких систем поведінкою перетину розподілу імовірності на фазовому портреті незбуреної системи. Обґрунтовано вибір перетину на рівні 1/е2, який названо "характерним перетином", як найбільш інформативного.
Для лінійних систем першого і другого порядку виявлені основні закономірності поведінки характерного перетину. Отримані аналітичні вирази для координат та розмірів усталеного характерного перетину в околі стійких особливих точок. Доведено теорему, яка дає можливість за значеннями параметрів та початковими умовами без проміжних розрахунків виявити одностороннє або двостороннє зростання розмірів характерного перетину в околі нестійких особливих точок.
Для нелінійних динамічних систем першого і другого порядку виявлені основні особливості поведінки характерного перетину, викликані обмеженістю потенціальної функції та можливістю наявності декількох станів рівноваги. Виявлена біфуркаційна зміна характеру випадкового процесу – перехід від розривно-стаціонарного до нестаціонарного. Запроваджені в роботі означення локальної стійкості до шуму, області притягання локально стійкої точки рівноваги та граничних (біфуркаційних) значень параметрів у стохастичних системах дали можливість уніфікувати аналіз детермінованих та випадкових збурень динамічних систем.
3. Запропоновано і реалізовано застосування розвинутої теорії біфуркацій стохастичних динамічних систем до аналізу завадостійкості пристроїв фазової синхронізації. Порівняльним аналізом результатів застосування методу імітаційного моделювання (аналізу ансамблів реалізацій), розв’язків рівняння Фокера-Планка (аналізу розподілів похибки синхронізації) та кумулянтного аналізу у гаусовому наближенні виявлена область застосування кумулянтного методу. Встановлено, що кумулянтний аналіз дає виграш обчислювальної складності на два порядки, похибку визначення СКВ фази – до 10%, похибку визначення граничних параметрів шуму – до 3%.
На основі виявлених якісних відмінностей статистичної динаміки ФАПЧ запроваджено означення шумової смуги схоплення (ШСС), як нової характеристики працездатності пристроїв фазової синхронізації. Уточнено раніше запроваджене означення шумової смуги утримання (ШСУ). На прикладах ФАПЧ другого порядку виявлений статистичний та імовірнісний зміст ШСС та ШСУ.
Порівняння визначених значень ШСС та ШСУ із відомими для детермінованих систем значеннями показало адекватність кумулянтної моделі. Побудована та досліджена кумулянтна модель ФАПЧ у ексцесному наближенні показала, що урахування вищих кумулянтів збільшує обчислювальну складність на порядок, точність визначення СКВ фази – до 0,5%, але майже вдвічі зменшує область застосування методу.
4. Розроблено новий метод аналізу статистичної динаміки нелінійного ФАПЧ, який відрізняється від існуючих можливістю урахування впливу на процес синхронізації детермінованих і випадкових збурень з однакових позицій – визначення границь працездатності пристрою. При проектуванні СФД, призначених для приймання ЧМ сигналу на фоні шуму, метод не вимагає апріорно завдавати параметри завади. Метод і його програмна реалізація дають можливість використовувати на етапі проектування відомий критерій мінімуму фазової похибки, а крім того, вперше запропоновані для такого використання критерії максимальної граничної інтенсивності завад та максимального діапазону стеження. Використання цих критеріїв виграш за окремими показниками від декількох відсотків до декількох разів порівняно з лінійним параметричним синтезом.
5. Обґрунтована та розроблена структура модифікованого пристрою ФАПЧ, який забезпечує значне підвищення завадостійкості зі збереженням динамічних властивостей шляхом локального зменшення рівня сигналу розузгодження фазового детектора.
Імітаційним моделюванням модифікованого пристрою у випадку дії тільки випадкової завади показана можливість підвищення граничної завадостійкості до 2,5..5 разів та розширення діапазону стеження на 25%..200%, показано, що виграш ВСШ за потужністю становить 14-18 дБ для безфільтрового ФАПЧ та 4-10 дБ для ФАПЧ з інтегруючим фільтром. Шляхом аналізу нелінійної математичної моделі у випадку дії тільки детермінованих збурень визначена область простору параметрів пристрою, в межах якої пристрій є глобально стійким, що дає можливість проектування завадостійких пристроїв синхронізації з широкою смугою схоплення.
6. На прикладах типових задач радіолокації, радіозв’язку та радіонавігації показана можливість підвищення завадостійкості пристроїв фазової синхронізації приймачів радіосигналів шляхом застосування розробленої методики вибору параметрів пристроїв синхронізації без збільшення енергетичних параметрів сигналу.
7. Для радіолокаційної задачі показано, що параметричний синтез кумулянтним методом дає виграш до 5% за завадостійкістю та до 40% за діапазоном стеження. Розраховані параметри модифікованого ФАПЧ, які дають можливість збільшити завадостійкість більш ніж у 3 рази, а діапазон стеження і смугу схоплення від 2 до 6 разів.
8. Для задачі проектування синхронного фазового детектора ЧМ сигналу показана можливість технічної реалізації приймання сигналів з глибокою кутовою модуляції (з індексами до 18 рад). Визначені параметри і структура пристрою, які дають можливість знизити на 10 дБ шумовий поріг (за індексу модуляції 3,3 рад) або збільшити на 8 дБ відношення сигнал-шум (ВСШ) вихідного сигналу без збільшення ВСШ на вході (за індексу модуляції 6,28 рад). Показано, що подальше збільшення індексу модуляції (до 12..18 рад) збільшує ВСШ на виході на 1..2 дБ і є недоцільним.
9. Для радіонавігаційної задачі на прикладі вибору параметрів схеми стеження за носійною частотою приймача супутникового навігаційного сигналу системи GPS показана можливість збільшення завадостійкості на 2 дБ шляхом нелінійного параметричного синтезу та на 8..12 дБ застосуванням модифікованого пристрою ФАПЧ. Моделювання показало, що смуга схоплення пропонованого пристрою у 4,8 разів більша, а час схоплення у 30..100 разів менший, ніж у існуючих аналогів.
10. Використання розроблених у роботі теоретичних положень та математичних моделей дає можливість оптимізувати параметри ФАПЧ з урахуванням впливу детермінованих збурень у вигляді полігармонічного модулювального сигналу та сигналу із заданою формою спектру, а також враховувати вплив частотних і фазових флуктуацій та адитивних завад.
Список праць автора за темою дисертації
- Мандзий Б.А., Бондарев А.П. Качественный анализ статистической динамики системы ФАПЧ // Известия ВУЗов МВ и ССО СССР. Радиоэлектроника. –1988. –№ 12. –С.74-76.
- Бондарєв А.П., Мандзій Б.А. Аналіз граничної завадостійкості системи фазової синхронізації // Теоретична електротехніка. –1998. –№ 54. –С.14-17.
- Бондарєв А.П., Капшій О.В. Критерій граничної завадостійкості системи фазової синхронізації // Вісник ДУ "ЛП". Радіоелектроніка та телекомунікації. –1998. –№ 352. –С. 98-100.
- Бондарєв А.П., Хархаліс О.В. Динаміка системи з періодичною нелінійністю під впливом шумів // Вісник ДУ"ЛП". Радіоелектроніка та телекомунікації. –1999. –№ 367. –С.28-30.
- Бондарєв А.П. Вплив міжканальних і внутрішньоканальних завад на синхронізацію приймача // Моделювання та інформаційні технології. –2002. –Вип. 18. –С. 207-211.
- Бондарєв А.П. Енергетичні умови зриву синхронізації // Моделювання та інформаційні технології. –2002. –Вип.19. –С.171-178.
- Бондарєв А.П. Залежність спектру фазових флуктуацій пристрою синхронізації від характеристик фазового детектора // Моделювання та інформаційні технології. –2003. –Вип.20.– С. 198-202.
- Бондарєв А.П. Параметричний синтез ФАПЧ з урахуванням подібної завади і шуму // Вісник НУ"ЛП". Радіоелектроніка та телекомунікації. –2003. –№ 477. –С. 83-87.
- Бондарєв А.П. Моделювання пристрою синхронізації з підвищеною завадостійкістю // Вісник НУ "ЛП". Електроенергетичні та електромеханічні системи. –2003. –№ 479. –С. 24-29.
- Мандзій Б.А., Бондарєв А.П. Вплив характеристики фазового детектора на якість та завадостійкість синхронізації // Відбір і обробка інформації. –2003. –Вип. 19(95). –С. 63-68.
- Бондарєв А.П. Теоретичні засади аналізу завадостійкості пристроїв синхронізації // Вісник НУ "ЛП". Радіоелектроніка та телекомунікації. –2004. –№ 508. –С. 3-18.
- Бондарєв А.П. Статистичний зміст шумової смуги схоплення ФАПЧ // Збірник наукових праць Інституту проблем моделювання в енергетиці ім. Г.Є.Пухова. –2005. –Вип. 29. –С. 128-132.
- Бондарєв А.П., Коханий І.О. Шумові біфуркації безфільтрової ФАПЧ в часовій області // Моделювання та інформаційні технології. –2005. –Вип. 30. –С. 105-109.
- Бондарєв А.П. Шумові смуги утримання і схоплення пристроїв синхронізації // Вісник Вінницького політехнічного інституту. –2005. –№5(62). –С.113-116.
- Бондарєв А.П. Статистичний аналіз ФАПЧ другого порядку в часовій області // Вісник НУ"ЛП". Радіоелектроніка та телекомунікації. –2005. –№ 534. –С. 74-77.
- Бондарєв А.П. Гранична завадостійкість синхронізації з фазомодульованим сигналом // Збірник наукових праць Інституту проблем моделювання в енергетиці ім. Г.Є.Пухова. –2005. –Вип. 31. –С. 116-121.
- Бондарєв А.П., Лазько О.В., Недоступ Л.А. Вплив негаусовості розподілу фазової похибки на якість синхронізації та граничну завадостійкість ФАПЧ // Теоретична електротехніка. –2005. –№ 58. –С.8-14.
- Мандзій Б.А., Бондарєв А.П. Статистична динаміка пристрою синхронізації з фазомодульованим сигналом // Відбір і обробка інформації. –2005. –Вип. 23(99). –С. 79-82.
- Bondarev A., Lazko O., Nedostup L. Synchronization quality analysis with consideration of high cumulants of phase error distribution // Electronics and electrical engineering. –Kaunas: Technologija. –2006. –No 2(66). –P. 17-20.
- Бондарєв А.П. Розширення робочої ділянки характеристики фазового детектора // Збірник наукових праць Інституту проблем моделювання в енергетиці ім. Г.Є.Пухова. –2006. –Вип. 34. –С. 81-90.
- Бондарєв А.П. Нелінійний параметричний синтез слідкуючого фазового детектора // Радіоелектроніка і інформатика. –2006. –№1(32). –С. 27-30.
- Бондарєв А.П. Зниження шумового порогу фазового автопідстроювання частоти // Вісник НУ"ЛП". Радіоелектроніка та телекомунікації. –2006. –№ 557. –С. 25-29 .
- Бондарєв А.П. Шумові та динамічні властивості модифікованого пристрою фазового автопідстроювання частоти // Радіотехніка. –2006. –Вип.146. –С. 171-177.
- Бондарєв А.П., Мартинів М.С. Порівняльне імітаційне моделювання пристроїв слідкування за несучою радіолокаційного сигналу // Збірник наукових праць Інституту проблем моделювання в енергетиці ім. Г.Є.Пухова. –2006. –Вип. 35. –С. 85-90.
- Мандзій Б.А., Бондарєв А.П. Підвищення завадостійкості демодулятора фазомодульованого сигналу // Відбір і обробка інформації. –2007. –Вип. 26(102). –С. 65-73.
- Бондарєв А.П., Давіденко С.В., Павлов Б.О. Параметричний синтез синхронного детектора багатоканального групового сигналу з частотною модуляцією // Вісник Хмельницького національного університету. –2007. –№2, Т.2(90). –С. 147-150.
- Бондарєв А.П. Параметричне та схемотехнічне підвищення завадостійкості фазового демодулятора // Інформаційні технології та комп'ютерна інженерія. –2007. –№2 (9). –С.29-33.
- Mandzij B., Bondarev A. Symulacja komputerowa układu synchronizacji fazowej w obecności sygnału PSK // Zeszyty naukowe Wyższej Szkoły Informatyki w Łodzi. – Łódz: ReadMe, 2006. –Vol.5, Nr 1. –P. 31-36.
- Бондарєв А.П., Давіденко С.В. Підвищення завадостійкості приймача супутникових навігаційних сигналів // Сучасні досягнення геодезичної науки та виробництва. Збірник наукових праць Західного геодезичного товариства. –2007. –С. 109-114.
- Патент України на винахід № 66435. H03L7/00 / Бондарєв А.П., Мартинів М.С. "Пристрій фазової автопідстройки частоти". Заявка № 4869869 від 01.10.90; Опубл.: Бюл. №5, 2004. –4 с.
- Бондарев А.П., Мандзий Б.А. Выбор параметров СФС с учетом шума и узкополосной помехи // Тезисы докладов всес. науч.-техн. конференции "Развитие и совершенствование устройств синхронизации в системах связи". Горький, 1988. С. 66.
- Бондарев А.П., Мартынив М.С. Помехоустойчивое устройство ФАПЧ // Тезисы докладов науч.-техн. конференции "Развитие и совершенствование устройств синхронизации в системах связи". Ярославль, 1993. С. 14.
- Bondarev A. Sync Devices Noise-Immunity Analysis Theoretical Basis // Proceeding of the International Conference TCSET'2004. Lviv-Slavsko, 2004. P. 27-34.
- Бондарєв А.П. Шумові смуги утримання і схоплення пристроїв синхронізації // Матеріали міжнародної НТК "Сучасні проблеми радіоелектроніки, телекомунікацій та приладобудування”. Вінниця, 2005. С. 57-58.
- Bondarev A. Decreasing of Phase Locked Loop Noise Threshold // Proceeding of the International Conference TCSET'2006. Lviv-Slavsko, 2004. P. 508-509.
- Bondarev A., Lazko O., Nedostup L. Anallysis of Kurtosis Distribution of Syncronization Error // Proceeding of the International Conference TCSET'2006. P. 524-526.
- Бондарєв А.П. Програма нелінійного параметричного синтезу синхронного фазового детектора // Збірник матеріалів міжвузівської науково-технічної конференції науково-педагогічних працівників. – Львів: Ліга-прес, 2006. – 248с. / С. 189-190.
- Бондарєв А.П. Нелінійний параметричний синтез синхронного фазового детектора // Материалы 10-го юбилейного международного молодежного форума "Радиоэлектроника и молодежь в ХХІ веке". –Харків: ХНУРЕ, 2006. С.130.
- Mandzij B., Bondarev A. Nonlinear mathematical model of a sync phase detector statistical dynamics // V Sympozjum "Modelowanie i symulacja komputerowa w technice". –Łódź: 2006. P. 87-90.
- Бондарєв А.П. Параметричне та схемотехнічне підвищення завадостійкості фазового демодулятора // Матеріали другої міжнародної НТК " Сучасні проблеми мікроелектроніки, радіоелектроніки, телекомунікацій та приладобудування” СПРТП2-2006”. Вінниця, 2006. С. 136-137.
- Бондарев А.П. Повышение помехоустойчивости демодулятора беспроводных средств телекоммуникации // Материалы 1-й Международной научной конференции "Глобальные информационные системы. Проблемы и тенденции развития". Харьков-Туапсе, 2006. С. 314-315.
- Бондарєв А.П., Мартинів М.С. Порівняльне імітаційне моделювання пристроїв слідкування за несучою радіолокаційного сигналу // Науково-практична конференція "Сучасні проблеми телекомунікацій – 2006". Матеріали. Львів, 2006. С.16-17.
- Бондарєв А.П., Давіденко С.В., Павлов Б.О. Параметричний синтез синхронного детектора багатоканального групового сигналу з частотною модуляцією // П’ята МНПК "Комп’ютерні системи в автоматизації виробничих процесів". Реферативний збірник наукових праць. Хмельницький, 2007. С. 42.
- Бондарєв А.П., Мандзій Б.А. Підвищення завадостійкості приймання сигналу з глибокою кутовою модуляцією // Матеріали ІІІ МНТК "Сучасні проблеми радіоелектроніки, телекомунікацій та приладобудування". Вінниця, 2007. С. 122-123.
- Бондарєв А.П., Давіденко С.В. Схемотехнічне підвищення завадостійкості детектора цифрових радіосигналів // Матеріали ІІІ МНТК "Сучасні проблеми радіоелектроніки, телекомунікацій та приладобудування". Вінниця, 2007. С. 121.