Міністерство освіти І науки України Національний університет “Львівська політехніка”
| Вид материала | Автореферат |
- Міністерство Освіти І Науки України Національний університет “Львівська політехніка”, 2021.84kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1080.17kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1068.44kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1259.1kb.
- Національний університет «львівська політехніка» алзаб аєд хамдан, 385.08kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 1563.62kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 208.38kb.
- Міністерство освіти І науки україни національний університет «львівська політехніка», 723.06kb.
- Міністерство освіти І науки України Національний університет "Львівська політехніка", 526.12kb.
- Міністерство освіти І науки України Національний університет "Львівська політехніка", 305.54kb.
Рис.9. Стаціонарні значення СКВ фазової похибки, розраховані за стрижневою моделлю (а), кумулянтним методом (б) та за рівнянням Фокера – Планка (в).
Залежності СКВ фазової похибки від інтенсивності шуму N і початкової розстройки γ, розраховані за стрижневою моделлю, кумулянтним методом та за рівнянням Фокера – Планка наведені на рис. 9.
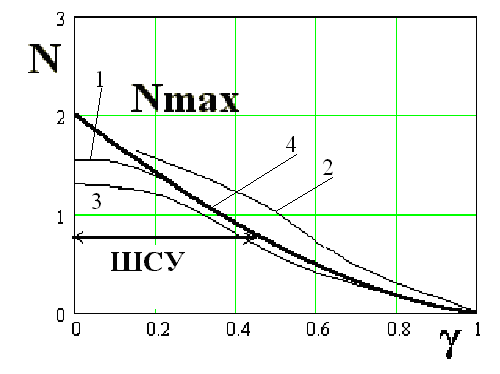 |
| Рис.10. Гранична інтенсивність шуму. 1–кумулянтний аналіз, 2– дані експерименту, 3 – рівняння Фокера -Планка [1], 4 – стрижнева модель. |
Процес синхронізації у ФАПЧ 2-го порядку з пропорційно-інтегруючим фільтром (ПІФ) описує двовимірний ВП (φ,y), який задовольняє систему стохастичних рівнянь
 (8)
(8)де φ – фазова похибка синхронізації, τ – нормований до сталої часу ПІФ час, y – нормована до смуги утримання частотна похибка, β – нормована до смуги утримання смуга ПІФ, γ – нормована до смуги утримання розстройка сигналу і керованого генератора (КГ), m – параметр ПІФ, Φ(t) – внутрішні збурення, викликані кутовою модуляцією, керуючими впливами або завадами у петлі керування КГ, ρ – відношення сигнал / шум у смузі ПІФ.
Отримані з (8) рівняння дрейфу кумулянтів, аналогічні до (5), мають вигляд
 (9)
(9)де mφ , my – середні значення,
 – дисперсії фазової та частотної похибок, κ11 – взаємний кумулянт, який характеризує кореляцію похибок. Приклади розв’язків математичної моделі (9) за умови Φ(t)=0 та віддаленого від точки рівноваги початкового δ-подібного розподілу наведені на рис. 11 у вигляді поведінки характерного перетину (еліпсу) на фазовому портреті незбуреної системи. Параметри еліпсу однозначно пов’язані зі значеннями фазових змінних системи (9).
– дисперсії фазової та частотної похибок, κ11 – взаємний кумулянт, який характеризує кореляцію похибок. Приклади розв’язків математичної моделі (9) за умови Φ(t)=0 та віддаленого від точки рівноваги початкового δ-подібного розподілу наведені на рис. 11 у вигляді поведінки характерного перетину (еліпсу) на фазовому портреті незбуреної системи. Параметри еліпсу однозначно пов’язані зі значеннями фазових змінних системи (9).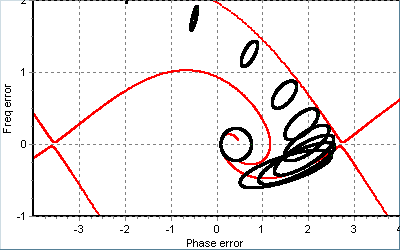
а) б)
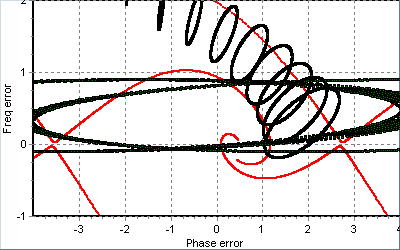
Рис.11. Еволюція характерного перетину густини імовірності похибки синхронізації у ФАПЧ 2-го порядку за малих (а) та великих (б) рівнів шуму.
Числове розв’язування системи рівнянь (9) показало, що залежно від початкових умов та параметрів пристрою і завад можливі три типи розв’язків.
1. За малих рівнів шуму або початкової розстройки після перехідного процесу встановлюються усталені розміри і положення характерного перетину в околі точки стійкої рівноваги, причому існують як завгодно віддалені початкові умови, за яких перехідний процес відбувається без торкання вхідних сепаратрис (рис. 11 а). Середнє значення усталеної частотної похибки дорівнює нулеві.
2. За більших рівнів шуму усталений характерний перетин існує, але досягннути його можна лише за початкових умов з обмеженої області поблизу точки стійкої рівноваги. Вибір віддалених початкових умов призводить до торкання вхідних сепаратрис (рис. 11 б) з подальшим необмеженим зростанням розмірів еліпсу. Середнє значення усталеної частотної похибки відрізняється від нуля.
3. За ще більших рівнів шуму не існує усталений характерний перетин. Навіть при виборі початкових умов у стійкій точці розміри характерного перетину (тобто дисперсії похибок) необмежено зростають, а середня частотна похибка є скінченою.
На підставі визначених типів розв’язків у роботі запроваджені означення, які стосуються простору параметрів пристроїв синхронізації за наявності шуму та характеризують їх працездатність.
Означення.1 Шумова смуга утримання (ШСУ) – діапазон значень граничної початкової розстройки частот сигналу і керованого генератора, для якої існує стаціонарний характерний перетин розподілу похибки синхронізації.
Означення. Шумова смуга схоплення (ШСС) – область простору параметрів, для якої область притягання стійкого характерного перетину необмежена.
 |
| Рис. 12. Залежність ШСУ та ШСС від інерційності ФАПЧ. |
Отримані результати є корисними для практики проектування пристроїв фазової синхронізації. Однак, кумулянтна модель є наближеною, тому статистичний та фізичний зміст ШСУ та ШСС був додатково з’ясований шляхом безпосереднього інтегрування стохастичних рівнянь (8). За умов вибору параметрів у межах ШСУ типові реалізації ВП є розривно-стаціонарним процесом (рис. 13 а), у якому тривалі проміжки стаціонарних флуктуацій в околі одного зі станів рівноваги чергуються з короткотривалими проковзуваннями в окіл іншого стану рівноваги. Поза межами ШСУ інтервали стаціонарності не спостерігаються (рис. 13 б).
Імовірність PС квазісинхронного режиму, обчислена як відношення тривалості стаціонарних флуктуацій до тривалості реалізації, показана на рис. 13 в для різних наборів параметрів і демонструє збіг кривої PС=0,8 з визначеною границею ШСУ. В межах ШСУ імовірність одночасних проковзувань циклів в різних реалізаціях дуже мала (при PС=0,8 імовірність синхронізму хоча б в одній з трьох реалізацій становить 99%), що уможливлює забезпечення впевненої синхронізації з носійною частотою багатоканальним прийманням. За межами ШСУ (рис. 13 б) імовірність збігу в часі перехідних процесів у різних реалізаціях є великою і багатоканальність не гарантуватиме неперервного синхронізму.
а)
 б)
б)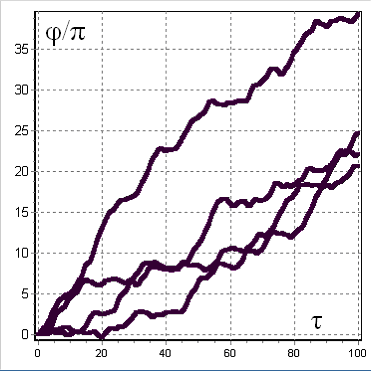 в)
в)