
Методическое пособие для студентов специальностей 220301 «Автоматизация технологических процессов и производств»
| Вид материала | Методическое пособие |
- Методические указания по выполнению дипломных проектов для студентов специальности, 294.98kb.
- Рабочая программа Наименование дисциплины «Прикладная механика» По специальности 220301., 152.82kb.
- Рабочий учебный план специальности 220301 Автоматизация технологических процессов, 263.36kb.
- Методические указания по выполнению курсовой работы для студентов специальности 220301, 189.64kb.
- Методические указания к выполнению дипломного проекта (дипломной работы) по специальностям:, 1064.71kb.
- Рабочая программа дисциплины «Теория автоматического управления» для студентов специальности, 126.16kb.
- Задание на курсовой проект выдается на специальном бланке ( приложение №2 ) в котором, 276.58kb.
- Задания, 35.81kb.
- Рабочая программа По дисциплине «Оборудование и технология печатных процессов» По специальности, 546.72kb.
- Рабочая программа по дисциплине «Основы проектирования машин» для студентов специальности, 283.06kb.
3.3.2 Контуры автоматического регулирования
Одной из основных задач контроллеров является задача автоматического регулирования технологических параметров. Структурная схема контура автоматического регулирования приведена на рисунке 13.
Задание Y*(t) сравнивается с текущим значением регулируемого параметра Y(t). В результате сравнения формируется сигнал рассогласования e(t) = Y*(t) – Y(t), который поступает в регулятор. Регулятор вырабатывает управляющий сигнал u(t) и подает его на исполнительное устройство. Управляющее воздействие v(t) от исполнительного устройства поступает на вход объекта. Помимо управляющего воздействия V(t) на поведение объекта влияет возмущение f(t). Задача регулятора – обеспечить изменение Y(t) в соответствии с заданием Y*(t) в условиях действия возмущений f(t) и погрешностей измерения выхода φ(t).
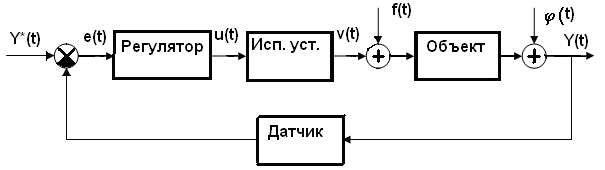
Рис. 13 Схема контура регулирования в АСУ ТП
Регулятор может формировать управляющий сигнал в соответствии с различными алгоритмами [7]. В зависимости от алгоритма выделяют следующие виды регуляторов:
- релейные регуляторы (как правило, двух- или трехпозиционные);
- типовые промышленные регуляторы непрерывного действия (П-, И-, ПИ-, ПД-, ПИД-регуляторы);
- типовые регуляторы импульсного действия (с амплитудной, широтной, частотной или фазовой модуляцией выходной последовательности импульсов);
- регуляторы состояния динамической системы (в непрерывном и дискретном вариантах);
- регуляторы на основе нечеткой логики (fuzzy logic);
- регуляторы на основе искусственных нейронных сетей.
Необходимо отметить, что термин регулятор специалистами в области автоматизации и управления используется в двух смыслах:
- техническое устройство, реализующее автоматическое управление каким-то физическим процессом;
- закон (алгоритм) U(t) = U(e(t),t), в соответствии с которым формируется управляющее воздействие U(t) по сигналу рассогласования e(t) = y*(t) – y(t), где y*(t) и y(t) – задание и текущее значение регулируемой величины соответственно.
Регуляторы, как технические устройства, принято делить на две категории:
- регуляторы прямого действия, в которых для перемещения регулирующего органа (клапан, заслонка, задвижка) используется внутренняя энергия регулируемой среды и не используются внешние источники энергии;
- регуляторы косвенного действия (электрические, гидравлические, пневматические и комбинированные – электропневматические, электрогидравлические), использующие для воздействия на регулирующий орган внешний источник энергии (электрическая сеть, масло под давлением, сжатый воздух).
3.3.2.1 Регуляторы прямого действия
Простейшим примером регулятора прямого действия является поплавковый регулятор уровня жидкости в емкости. Так поплавковый регулятор поддерживает уровень бензина в камере карбюратора автомобиля. При возрастании уровня бензина поплавок поднимается и с использованием рычага с игольчатым клапаном перекрывает поступление бензина в камеру. Снижение уровня бензина вызывает опускание поплавка и открытие клапана. Клапан перемещается за счет внутренней энергии, обусловленной выталкивающей силой, действующей на поплавок.
Другим примером промышленного регулятора прямого действия является регулятор температуры РТ-ДО (ДЗ), внешний вид которого приведен на рисунке 14.

Рис. 14 Регулятор температуры прямого действия РТ-ДО (ДЗ)
Регулятор температуры прямого действия типа РТ-ДО (ДЗ) предназначен для автоматического поддержания температуры регулируемой среды путем изменения расхода пара, жидких и газообразных сред, неагрессивных к материалам регулятора (корпус СЧ-15, седло 40Х13 или БрОЗЦ7С5Н1, клапан 20Х13, шток и термобаллон термосистемы 12Х18Н10Т). Регулятор РТ-ДО - с двухходовым нормально открытым регулирующим органом; РТ-ДЗ - с двухходовым нормально закрытым регулирующим органом. Также по спецзаказу прибор может комплектоваться фильтром соответствующего диаметра условного прохода, ответными приварными стальными фланцами, возможно исполнение корпусных деталей из стали 25 или 12Х18Н10Т.
Принцип действия регулятора:
Термобаллон регулятора (на рис. 14 справа) помещается в среду, температуру которой необходимо регулировать. Термобаллон соединен герметичным трубопроводом с сильфоном, на котором закреплен шток регулирующего органа. Термобаллон, трубопровод и сильфон заполнены жидкостью. При повышенной температуре регулируемой среды жидкость расширяется, увеличивая объем сильфона и перемещая шток регулирующего органа в сторону закрытия. Расход теплоносителя снижается, что приводит к снижению температуры регулируемой среды.
Регулятор имеет винт настройки и шкалу с использованием которых устанавливается задание по температуре.
Область применения регуляторов температуры РТ-ДО (ДЗ):
- для систем центрального отопления;
- охладителей двигателей, конденсаторов и очистных станций;
- парогенераторов, печей, теплообменников, бойлеров, цистерн;
- обезжиривающих установок и гальванических сушильных шкафов;
- сушильных помещений и теплиц;
- трубопроводных магистралей.
Пример установки регулятора РТ-ДО на теплообменник горячего водоснабжения приведен на рисунке 15. Регулятор меняет подачу греющей воды (коричневый трубопровод) в теплообменник в зависимости от температуры воды, поступающей потребителю (зеленый трубопровод).
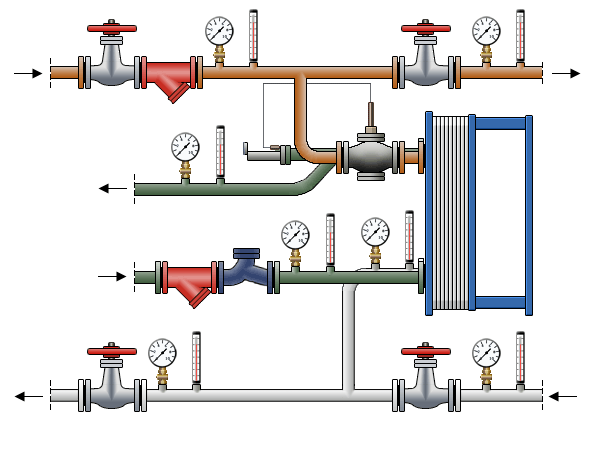
Рис. 15 Пример использования терморегулятора РТ-ДО в теплообменнике
Технические характеристики регулятора температуры прямого действия РТ-ДО (ДЗ) приведены в таблице 1
Таблица 1.
Технические характеристики регулятора РТ-ДО (ДЗ)
| Ду, мм | 15 | 25 | 40 | 50 | 80 |
| Макс. dР на регулирующем органе, МПа | 0,6 | 0,6 | 0,6 | 0,4 | 0,4 |
| Условная пропускная способность Kv, м³/ч | 2,5 | 6,3 | 16,0 | 25,0 | 60,0 |
| Условное давление регулирующей среды, МПа | до 1,0 | до 1,0 | до 1,0 | до 1,0 | до 0,63 |
| Зона пропорциональности, °С, не более | 10 | 10 | 10 | 12,5 | 12,5 |
| Температура рабочей среды, °С | от -15 до +225 |
| Зона нечувствительности, °С, не более | 1 |
| Протечка в % от Kv, не более | 0,1 |
| Длина дистанционной связи, м | 1,6; 2,5; 4; 6; 10 |
| Диапазоны настройки, °С | 0-40; 20-60; 40-80; 60-100; 80-120; 100-140; 120-160; 140-180 |
| Постоянная времени, с, не более | 100 |