
Методическое пособие для студентов специальностей 220301 «Автоматизация технологических процессов и производств»
| Вид материала | Методическое пособие |
Содержание1. Краткая история развития АСУ ТП |
- Методические указания по выполнению дипломных проектов для студентов специальности, 294.98kb.
- Рабочая программа Наименование дисциплины «Прикладная механика» По специальности 220301., 152.82kb.
- Рабочий учебный план специальности 220301 Автоматизация технологических процессов, 263.36kb.
- Методические указания по выполнению курсовой работы для студентов специальности 220301, 189.64kb.
- Методические указания к выполнению дипломного проекта (дипломной работы) по специальностям:, 1064.71kb.
- Рабочая программа дисциплины «Теория автоматического управления» для студентов специальности, 126.16kb.
- Задание на курсовой проект выдается на специальном бланке ( приложение №2 ) в котором, 276.58kb.
- Задания, 35.81kb.
- Рабочая программа По дисциплине «Оборудование и технология печатных процессов» По специальности, 546.72kb.
- Рабочая программа по дисциплине «Основы проектирования машин» для студентов специальности, 283.06kb.
1. Краткая история развития АСУ ТП
Первые автоматические устройства управления промышленного назначения появились в связи с изобретением и развитием паровых машин. Такими устройствами были поплавковый регулятор питания парового котла водой, разработанный российским механиком Н. И. Ползуновым в 1756 г., а также регулятор скорости паровой машины, созданный англичанином Д. Уаттом в 1784 г.. Длительное время регуляторы паровой машины были основными видами автоматических устройств управления в промышленности.
Появление автоматических регуляторов и рост требований к качеству регулирования вызвали потребность в разработке теоретических основ их расчета. Основы научного подхода к проектированию и исследованию автоматических регуляторов были заложены работами английского ученого Джеймса С. Максвелла и российского ученого И. А. Вышнеградского. Максвелл в 1868 г. опубликовал статью, в которой он исследовал устойчивость замкнутой системы регулирования скорости паровой машины на основе регулятора Уатта. И. А. Вышнеградский, в 1876 г. опубликовал работу «Об общей теории регуляторов», которая, по признанию многих специалистов, положила начало классической теории автоматического управления. В дальнейшем большой вклад в развитие теории автоматического управления внесли работы А. М. Ляпунова, И.Е. Жуковского, А. Стодолы, А. Гурвица, Г. Найквиста и т.д.
В тридцатые и сороковые годы ХХ столетия теория и практика автоматического регулирования получили бурное развитие, что во многом связано с индустриализацией и Второй мировой войной. В арсенале специалистов по управлению прочно закрепились принцип обратной связи, пропорционально-интегрально-дифференциальный (ПИД) регулятор, частотные методы анализа и синтеза систем. Помимо отдельных регуляторов в промышленности стали применяться локальные системы контроля, регулирования и управления (ЛСКРиУ). Так в конце 30-х годов на Магнитогорском и Кузнецком металлургических комбинатах были разработаны и внедрены системы регулирования теплового режима мартеновских печей. Типовая схема ЛСКРиУ приведена [4] на рисунке 1.
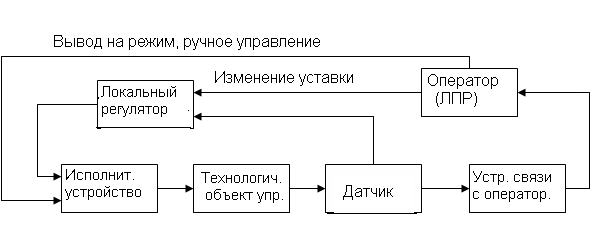
Рис. 1 Типовая схема ЛСКРиУ
ЛСКРиУ эффективны при автоматизации технологически независимых объектов с достаточно компактным расположением основного оборудования и несложными целями управления (стабилизация, программное управление) при хорошо отработанной технологии и стационарных условиях эксплуатации. Локальные регуляторы могут быть одно- и многоканальными. Наличие человека-оператора (лица, принимающего решение - ЛПР) в системе, территориальная компактность объекта позволяют использовать эту структуру на объектах с невысоким уровнем механизации и надежности технологического оборудования. ЛПР осуществляет общий контроль технологического процесса и, при необходимости, переходит на ручное управление. Устройство связи с оператором включает, как правило, измерительные приборы, устройства световой и звуковой сигнализации, регистрирующие приборы. Структура ЛСКРиУ соответствует классической структуре системы регулирования.
Увеличение числа контролируемых и регулируемых параметров, возрастание территориальной рассредоточенности ТОУ привели к появлению нового класса систем автоматизации технологических процессов – централизованных систем контроля, регулирования и управления (СЦКРиУ). Структура СЦКРиУ приведена [4] на рисунке 2.
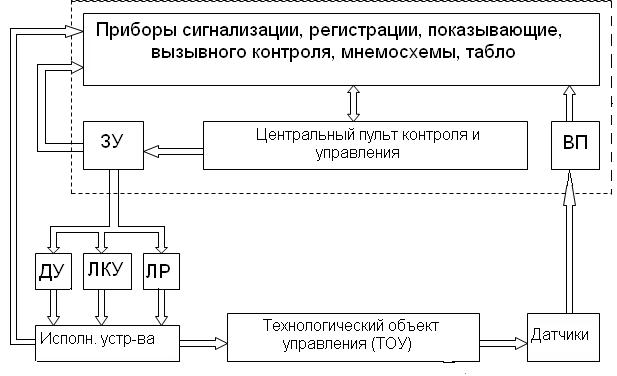
Рис. 2 Типовая схема СЦКРиУ
Для СЦКРиУ помимо функций локального регулирования (ЛР), свойственных ЛСКРиУ, характерны также функции дистанционного управления (ДУ), логико-командного управления (ЛКУ). Появляется центральный пульт контроля и управления. На пульте расположены средства отображения информации, полученной от датчиков, и командной информации от задающих устройств (ЗУ). Двойные стрелки на схеме отражают векторный характер сигналов и связей. В СЦКРиУ довольно часто используются многоканальные приборы (многоканальные измерительные приборы и вторичные преобразователи, многоканальные регуляторы, регистраторы технологических параметров).
В СЦКРиУ оператор может быть территориально отделен от ТОУ, поэтому проблемам отображения информации о ходе технологического процесса в системе уделяется повышенное внимание (мнемосхемы, табло, регистраторы, световая и звуковая сигнализация).
Появление электронных вычислительных машин (ЭВМ), бурный рост их технических характеристик (производительности, объемов памяти, надежности) позволили использовать ЭВМ в промышленности для автоматизации процессов обработки информации и решения задач управления. Первоначально ЭВМ в автоматизации технологических процессов использовались в основном для выполнения информационных функций (сбор, предварительная обработка, хранение, представление информации в удобном для оператора виде, контроль технологических параметров, сигнализация). В дальнейшем ЭВМ стали применять и для решения задач управления технологическими процессами сначала в режиме «советчика оператора».
Одной из первых промышленных АСУ ТП, в которой ЭВМ использовалась в управлении и в режиме «советчика оператора», и для автоматического формирования уставок аналоговым регуляторам, является построенная в 1959 году [1] в городе Порт-Артур, штат Техас система управления нефтеперегонным процессом. Работа выполнена совместно компанией Texaco и производителем ЭВМ RW 300– компанией Thomson Ramo Woolridge. В сравнении с современными компьютерами RW 300 имела очень низкие технические характеристики (время сложения составляло 1 мс, время умножения – около 20 мс, среднее время наработки на отказ - около 50 часов). Программы для ЭВМ создавались в машинных кодах и использовали весь скромный объем памяти.
АСУ ТП, в которых цифровая ЭВМ вырабатывает уставки для локальных регуляторов, называют системами с супервизорным управлением. Схема АСУ ТП с супервизорным управлением приведена на рисунке 3.
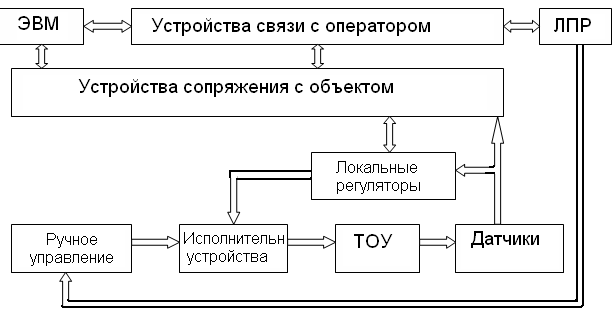

Рис. 3 Схема АСУ ТП с супервизорным управлением
Компьютерное управление – это область, в которой с самого начала существовало необычно конструктивное взаимодействие между теорией и практикой. Аппарат анализа и синтеза систем управления, разработанный ранее на основе непрерывного математического описания, не применим напрямую для проектирования цифровых систем, построенных на базе компьютера. Потребовалось создать специальный раздел в теории управления – дискретные системы управления. Особым катализатором, интенсифицирующим исследования в этой области, стали ракетно-космические программы СССР и США. Существенный вклад в создание теоретических основ компьютерных систем управления внесли российские ученые Цыпкин Я.З., Красовский А.А., Кузин Л.Г., Бесекерский В.А., Волгин Л.Н. и зарубежные Джури Э., Калман Р., Бьюси Р., Ито В., Ту Д., Куо Б., Острем К. и др.
Важный шаг в развитии АСУ ТП был сделан в 1962 году, когда английская компания Imperial Chemical Industries представила концепцию прямого (непосредственного) цифрового управления (ПЦУ или НЦУ в русской технической литературе, Direct Digital Control – DDC в англоязычной литературе). Идея состояла в том, что сигналы от датчиков вводились в ЭВМ, а управляющие сигналы, сформированные компьютером, возвращались обратно непосредственно на исполнительные устройства. Из процесса управления убирались аналоговые регуляторы. Схема АСУ ТП с ПЦУ приведена на рисунке 4.
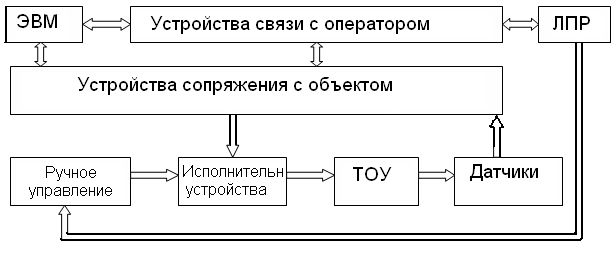
Рис. 4 Схема АСУ ТП с ПЦУ
Дальнейший рост числа АСУ ТП с ПЦУ связан с переходом в шестидесятые годы на новую элементную базу ЭВМ. Вначале полупроводниковые транзисторы позволили на порядок снизить стоимость единицы вычислительной мощности компьютера и повысить его надежность, а затем интегральные микросхемы улучшили эти показатели еще на порядок. Главный недостаток систем с ПЦУ состоит в том, что отказ ЭВМ приводил к потере управления технологическим объектом. Поэтому при удешевлении ЭВМ появилась возможность существенно повысить работоспособность АСУ ТП за счет дублирования ЭВМ (одна в работе, вторая – в горячем резерве).
Однако, централизованная структура АСУ ТП, когда практически все логические и арифметические вычислительные операции выполняются одной ЭВМ, достаточно скоро исчерпала свои возможности. И, несмотря на бурный рост технических характеристик ЭВМ, централизованные АСУ ТП перестали удовлетворять возросшим требованиям практики автоматизации. На смену централизованным пришли децентрализованные распределенные системы управления (Distributed Direct Digital Control – распределенное прямое цифровое управление). В децентрализованной распределенной системе существует несколько взаимосвязанных цифровых вычислительных средств (серверы, рабочие и инженерные станции, контроллеры, станции распределенного ввода/вывода, интеллектуальные датчики и исполнительные устройства, панели оператора и т.п.), по которым распределяются задачи АСУ ТП.
Главными предпосылками создания распределенных децентрализованных АСУ ТП стали создание локальных вычислительных сетей и разработка программируемого логического контроллера.
Первая в мире локальная вычислительная сеть ARPANET была построена в 1969 году агентством ARPA, работавшим над этой проблемой по заказу Министерства обороны США в течение 12 лет. В СССР первая локальная сеть ИАСНЕТ появилась в 1986 году.
Программируемый логический контроллер (ПЛК, programmable logic controller – PLC) – это специальный микрокомпьютер, первоначально предназначенный для выполнения операций переключения в промышленных условиях и призванный заменить применявшиеся ранее релейно-контакторные схемы. Современные ПЛК имеют гораздо более широкие возможности, включая работу с аналоговыми сигналами, ПИД-регулирование, выполнение математических операций, функций таймера, счетчика, программного задатчика режима и т.п. Однако первоначальное название и аббревиатура были сохранены, чтобы избежать путаницы с более общими терминами «программируемый контроллер» и «персональный компьютер» (оба по-английски PC).
Первый ПЛК был разработан в 1968 году группой инженеров компании General Motors. В это время еще не были изобретены микропроцессоры (первый микропроцессор создан в 1971 году). ПЛК на основе микропроцессора был впервые создан в США в 1977 году компанией Allan Bradley Corporation на базе микропроцессора Intel 8080, с использованием дополнительных схем быстрого выполнения битовых логических операций.
Конструктивно современные ПЛК устроены так, что они хорошо приспособлены к работе в типовых промышленных условиях, с достаточно широким температурным режимом, повышенной влажностью и запыленностью, при наличии высокого уровня вибрации и электромагнитных излучений.
В распределенных АСУ ТП выход из строя какого-то из вычислительных средств или какой-то из линий связи может привести к потере только части функций системы. В особо ответственных системах уровень надежности может быть существенно повышен за счет резервирования. Распределенные АСУ ТП и в настоящее время являются наиболее современным, высоко эффективным средством автоматизации и управления технологическими процессами. Сейчас на рынке аппаратных и программных средств широко представлена продукция различных производителей. Среди наиболее крупных производителей комплексных средств автоматизации можно выделить фирмы Siemens, Honeywell, Allan Bradley, ABB, Schneider Electric, National Instruments, GE Fanuc, Rockwell Automation и др.