
Краткий курс лекций по дисциплине «Электрические железные дороги» специальность 180700
| Вид материала | Курс лекций |
- Краткий курс лекций по дисциплине «Подвижной состав железнодорожного транспорта» специальность, 910.14kb.
- Открытое акционерное общество "российские железные дороги", 198.35kb.
- Методические указания: краткий курс лекций для студентов заочной формы обучения Санкт-Петербург, 1540.61kb.
- Краткий курс лекций, 182.24kb.
- Н. В. Рудаков Краткий курс лекций, 1552.23kb.
- Открытое акционерное общество "российские железные дороги", 1369.07kb.
- В. Б. Аксенов Краткий курс лекций, 1098.72kb.
- Краткий курс лекций по медицинской паразитологии Часть Клещи, 643.33kb.
- Краткий курс лекций по философии учебно-методическое пособие для студентов всех специальностей, 2261.57kb.
- Учебно-методический комплекс дисциплины История английской литературы Специальность, 473.74kb.
24. Методы решения уравнения движения поезда.
Используются три метода решения уравнения движения поезда:
1. Аналитический.
2. Метод установившихся скоростей.
3. Графический.
При решении уравнения движения поезда любым способом необходимо иметь диаграмму удельных ускоряющих и удельных замедляющих сил.
24.1.Аналитический метод.
П
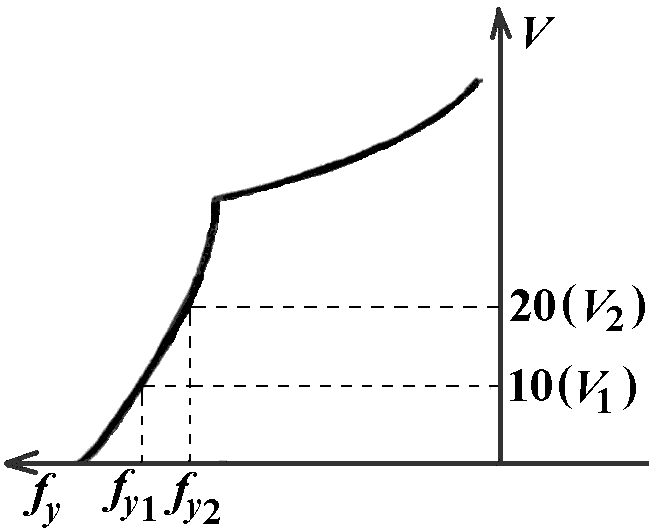

 ринимается определенный интервал скорости ΔV, пусть равный 10 км/ч. В каждом интервале скорости от 0 до 10 км/ч, от 10 до 20 км/ч и так далее по диаграмме удельных ускоряющих и удельных замедляющих сил определяем fy ср. Например, в интервале от 10 до 20 км/ч
ринимается определенный интервал скорости ΔV, пусть равный 10 км/ч. В каждом интервале скорости от 0 до 10 км/ч, от 10 до 20 км/ч и так далее по диаграмме удельных ускоряющих и удельных замедляющих сил определяем fy ср. Например, в интервале от 10 до 20 км/ч  (Н/кН), затем необходимо учесть величину уклона данного профиля пути, при ξ
(Н/кН), затем необходимо учесть величину уклона данного профиля пути, при ξ подсчитываем:
подсчитываем: Аналогичным способом подсчитывают для другого профиля пути. Далее все Δt складываем и находим время, например, для разгона поезда. Складывая всеΔS, определяется путь, проходимый, например, при разгоне поезда.
С учетом полученных данных ΔV, Δt, ΔS можно построить графические зависимости V(S) и t(S).
24.2.Метод установившихся скоростей.
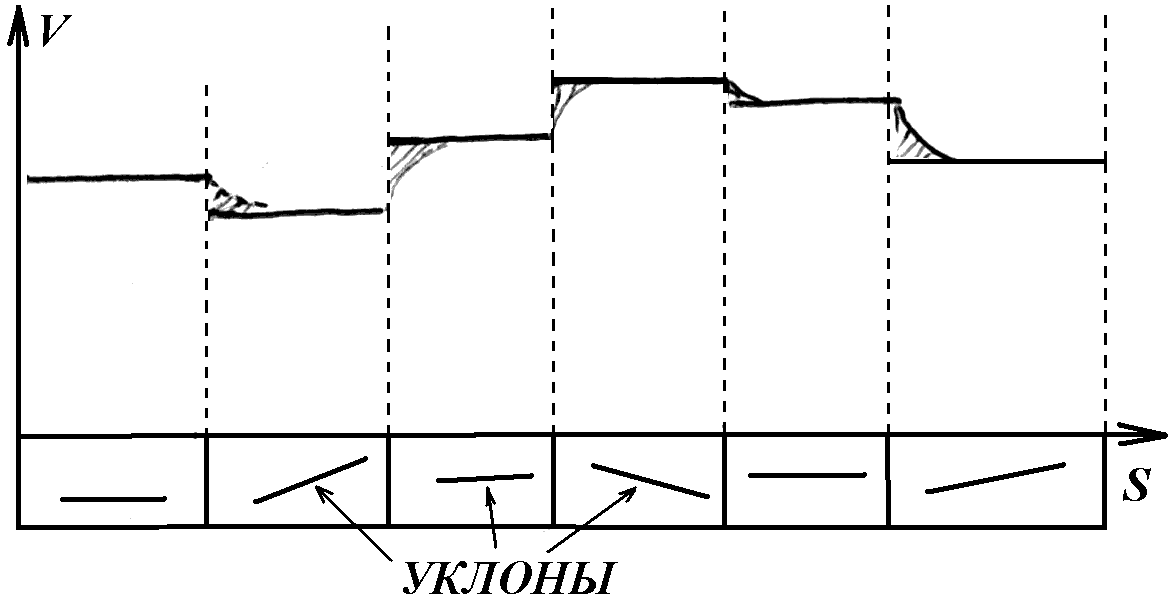
По диаграмме удельных ускоряющих и удельных замедляющих сил по крутизне каждого элемента пути определяют установившуюся скорость.
Установившиеся скорости для каждого элемента пути можно определить путем наложения на тяговую характеристику кривые сопротивления движению поезда на различных уклонах.
Т
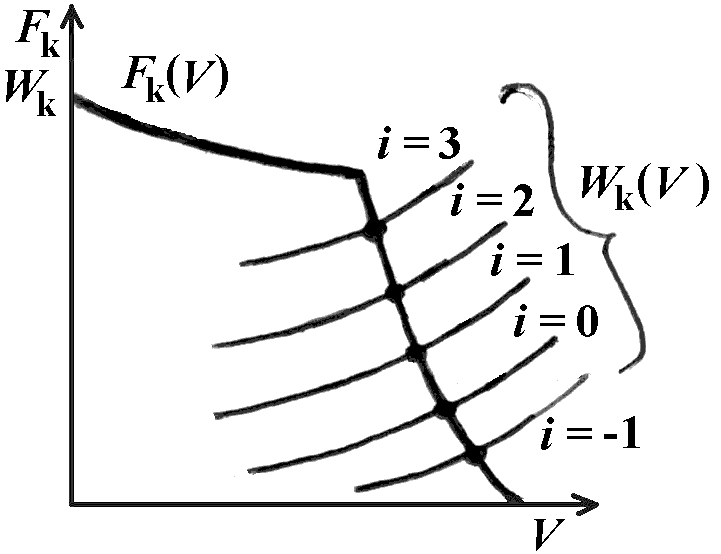 очки пересечения тяговой характеристики и кривых сопротивления движению поезда будут показывать установившуюся скорость для каждой крутизны.
очки пересечения тяговой характеристики и кривых сопротивления движению поезда будут показывать установившуюся скорость для каждой крутизны.Время движения поезда по каждому элементу пути при равномерной скорости
 , где t в мин, S в км, V в км/ч.
, где t в мин, S в км, V в км/ч.При этом необходимо внести поправки на разгон и замедление, которые принимаются для электровозов tp = 2 мин, tЗ = 1 мин, для электропоездов – tp = 0,5 мин, tЗ = 0,4 мин. Время движения по перегону (в мин):

П
ри этом методе не учитывается плановый переход от одной скорости движения к другой при изменении профиля пути.
Сравнивая расчеты с использованием метода установившихся скоростей и графическим методом, разница получается 4÷7% при электрической тяге и 11÷17% при тепловой тяге.
24.3.Графический метод.
Подробно рассмотрен в методических указаниях по выполнению курсовой работы.
25. Основные параметры ЭПС постоянного тока и
переменного тока.
| Параметры | ВЛ8 | ВЛ10 | ВЛ15 | ВЛ60К | ВЛ80С | ВЛ85 | |||
| Осевая формула | 20+20+20+20 | 20–20–20–20 | 20–20–20–20–20–20 | 30–30 | 20–20–20–20 | 20–20–20–20–20–20 | |||
| Сцепной вес, т | 180 | 184 | 300 | 138 | 192 | 288 | |||
| Полная длина, мм | 27520 | 32840 | 45000 | 20800 | 32840 | 45000 | |||
| Род тока | ПОСТОЯННЫЙ | ПЕРЕМЕННЫЙ | |||||||
| Конструктивная скорость, км/ч | 100 | 100 | 100 | 110 | 110 | 110 | |||
| Электрическое торможение | РЕКУПЕРАТИВНОЕ | НЕТ | реостатное | рекуперативное | |||||
| Мощность часового режима, кВт | 4200 | 5200 | 9000 | 4650 | 6520 | 10000 | |||
| Сила тяги часового режима, кН | 346 | 397 | 651 | 313 | 442 | 706 | |||
| Скорость часового режима, км/ч | 42,6 | 47,3 | 47,7 | 52 | 51,6 | 50,9 | |||
| К.П.Д. | 89,1 | 90,2 | 88,0 | 84 | 84 | 86 | |||
26.Упрощенная схема силовой цепи ЭПС постоянного тока.
Электрическая схема – это изображение электрических машин и электрических аппаратов в их условном обозначении с указанием электрической связи их между собой.
Электрическая цепь в отличие от электрической схемы, это путь протекания электрического тока при замкнутых контактах электрических аппаратов.
Упрощенная схема силовой цепи ЭПС переменного тока рассматривается при выполнении курсовой работы.
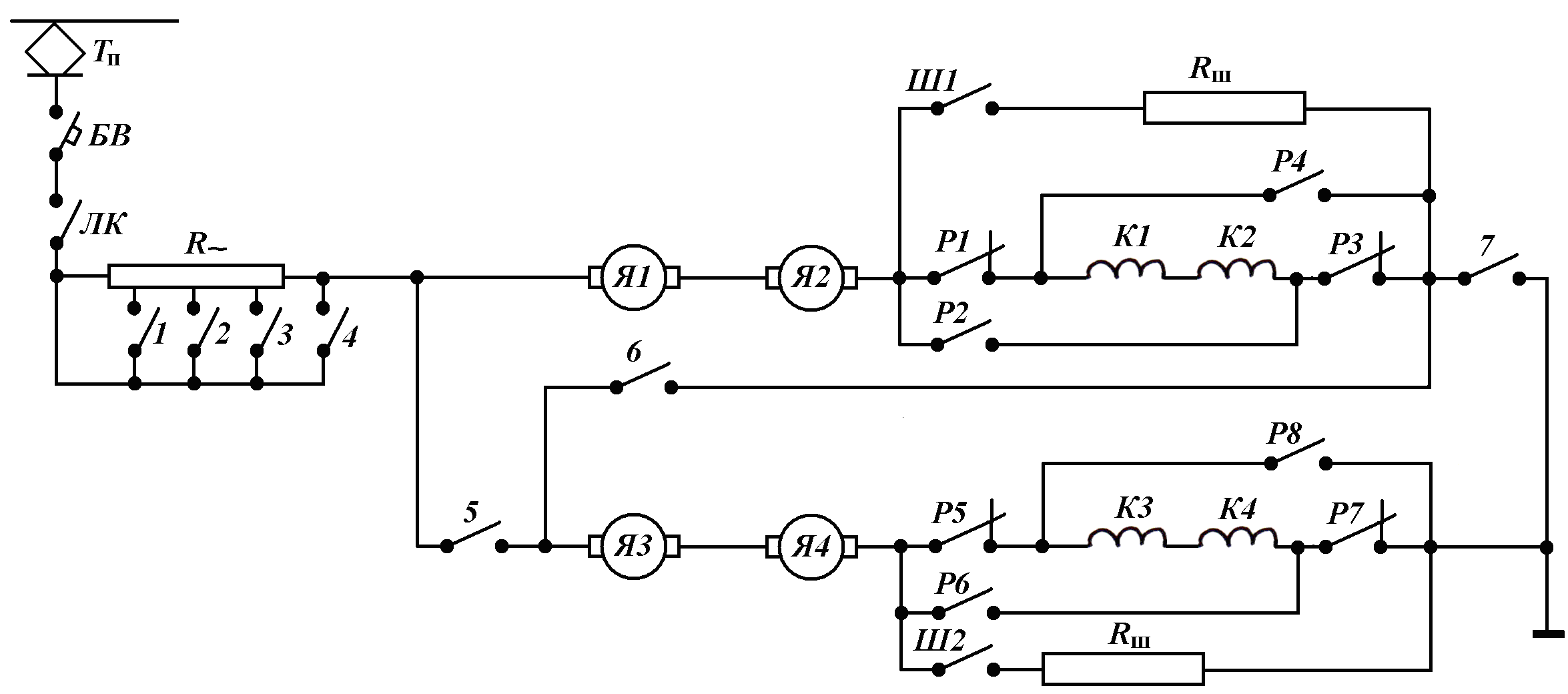
Основные элементы силовой схемы (тяговые электродвигатели рассматриваются отдельно):
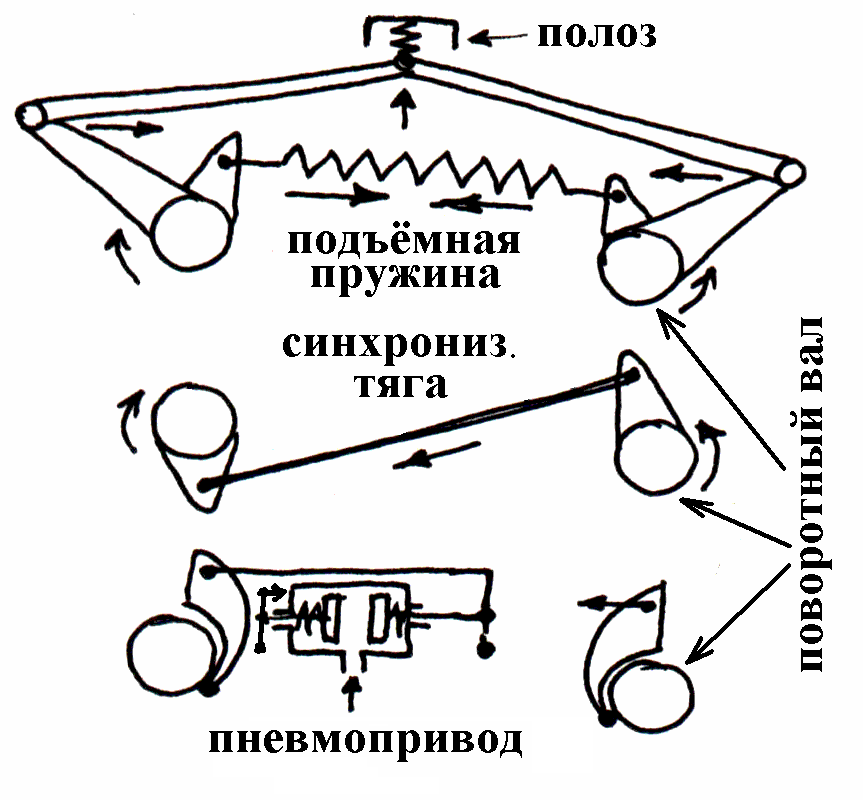 Тп – токоприемник, устанавливается на крыше электровоза или на крыше моторного вагона электропоезда. Является скользящим контактом, обеспечивая соединением электрической схемы ЭПС с контактным проводом. Нажатие на контактный провод 180Н (60÷90Н при переменном токе).
Тп – токоприемник, устанавливается на крыше электровоза или на крыше моторного вагона электропоезда. Является скользящим контактом, обеспечивая соединением электрической схемы ЭПС с контактным проводом. Нажатие на контактный провод 180Н (60÷90Н при переменном токе).Принцип работы токоприемника на ЭПС постоянного и переменного токов одинаковые.
Аппараты управления токоприемниками обеспечивают быстрый подъем токоприемника, быстрый отрыв полоза от контактного провода и мягкую его посадку на основание. Токоприемник должен быть менее инерционным, допускать большие скорости движения, успевая следить за траекторией контактного провода.
БВ - быстродействующий выключатель.
БВ – служит для оперативного включения и отключения силовой цепи электровоза от контактного провода, и для отключения при различных авар
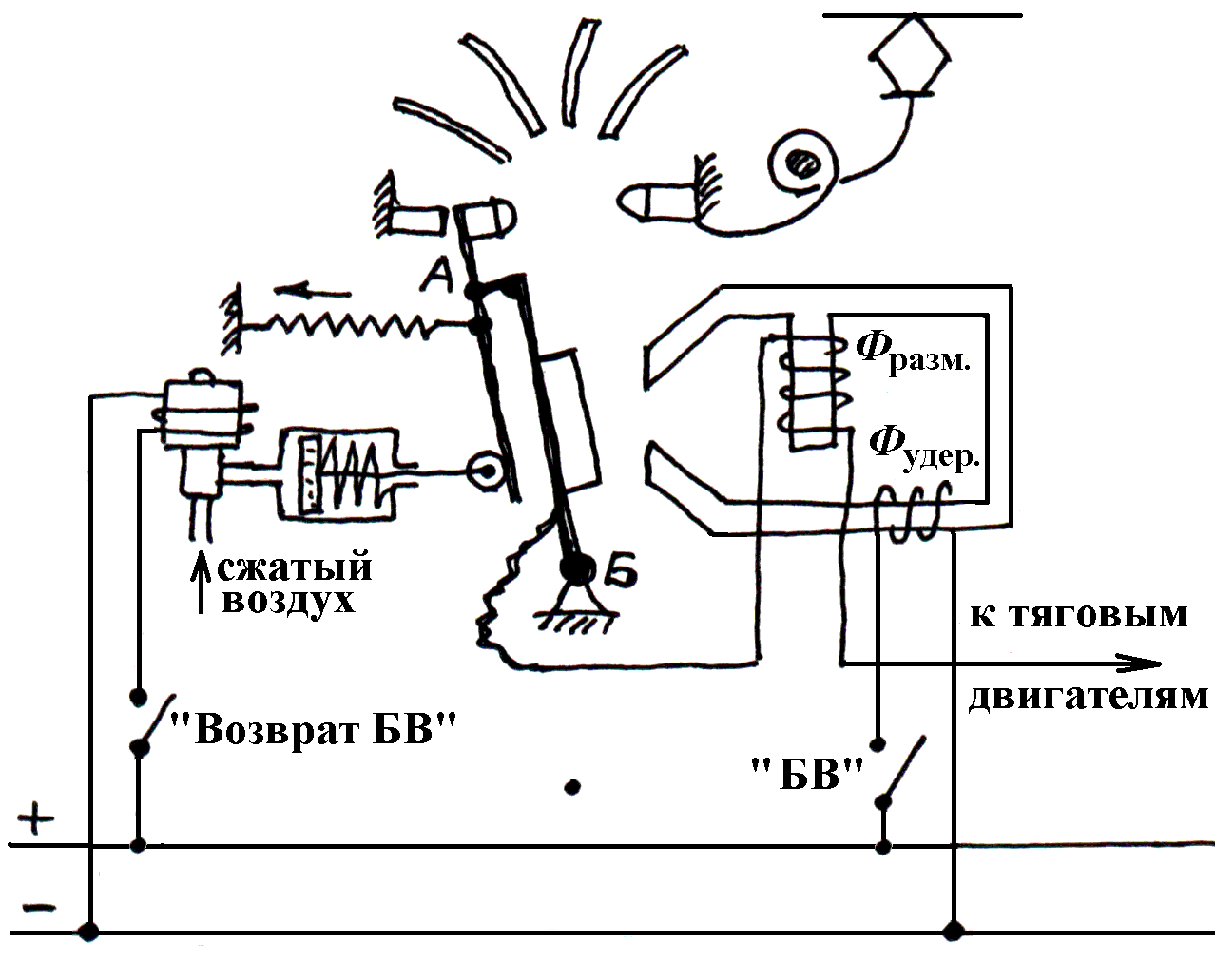 ийных ситуациях. Устанавливается на ЭПС постоянного тока.
ийных ситуациях. Устанавливается на ЭПС постоянного тока.Для включения БВ машинист включает кнопку «БВ», которая остается включенной, замыкая цепь удерживающей катушки БВ. Затем, машинист включает кнопку с самовозвратом «Возврат БВ». Замыкается цепь на катушку электромагнитного вентиля, который пропускает сжатый воздух в пневмоцилиндр. В пневмо-цилиндре поршень перемещается, сжимая пружину, и через шток роликом нажимает на контактный рычаг, который поворачиваясь относительно точки А, прижимается к якорю. При дальнейшем перемещении поршня якорь прижимается к сердечнику, поворачиваясь относительно точки Б. Но силовые контакты остаются разомкнутыми, пока кнопку «Возврат БВ» удерживаем включенной. После отпускания кнопки «Возврат БВ» под действием пружины в пневмоцилиндре поршень перемещается в прежнее положение, освобождая контактный рычаг. Под действием своей пружины контактный рычаг поворачивается относительно точки А, замыкая силовые контакты. Якорь остается притянутым к сердечнику под действием магнитного потока удерживающей катушки. При включенной кнопке «Возврат БВ» силовые контакты не замкнуты для того, чтобы при включении БВ на аварийный режим, БВ не смог бы отключиться. После включения БВ последовательно в силовую цепь включена размагничивающая катушка, магнитный поток которой раздваивается, с одной стороны направлен согласно Фудерж, а с другой – встречно. Соотношение витков катушек таково, что при нормальных условиях якорь остается притянутым. При к.з. в силовой цепи быстро возрастающий ток и магнитный поток размагничивающей катушки размагничивает сердечник и якорь под действием пружины быстро отпадает, размыкая силовые контакты, а образовавшаяся дуга магнитным дутьем выбрасывается на «рога» и гасится. Для уменьшения времени отключения после появления к.з. параллельно размагничивающей катушке включается индуктивный шунт, имеющий индуктивное сопротивление больше индуктивного сопротивления размагничивающего винта. Ток к.з., в основном, идет через размагничивающую катушку. Оперативное отключение и отключение при перезагрузках происходит размыканием цепи удерживающей катушки. Время отключения БВ 0,0015÷0,003 сек., регулируется изменением усилия пружины или перемещением винтов в магнитной системе сердечника. Ток уставки БВ, например, на ВЛ10 А. На ЭПС переменного тока роль, аналогичную БВ, выполняет главный выключатель ГВ (воздушный).
Электрические аппараты.
Электрический аппарат – это устройство, которое служит для замыкания и размыкания электрических цепей.
Электрические аппараты подразделяются:
1. По способу управления - на ручные и дистанционные. Большинство электрических аппаратов с дистанционным управлением, т.к. при их управлении обеспечивается безопасность, и возможна автоматизация процесса переключения.
2. По назначению - на командные, исполнительные, защиты, блокирования, автоматизации, сигнализации. Один и тот же аппарат может иметь несколько назначение.
3. По способу приведения в действие электрические аппараты с дистанционным управлением делятся на электромагнитные, электропневматические и с моторным приводом.
20.3.1.Электромагнитные контакторы
При подаче напряжения на катушку управления создается магнитный поток, который замыкаясь по сердечнику, притягивает якорь, преодолевая усилие отключающей пружины и замыкая контакты. При снятии напряжения с катушки под действием отключающей пружины якорь отпадает, размыкая контакты.
1
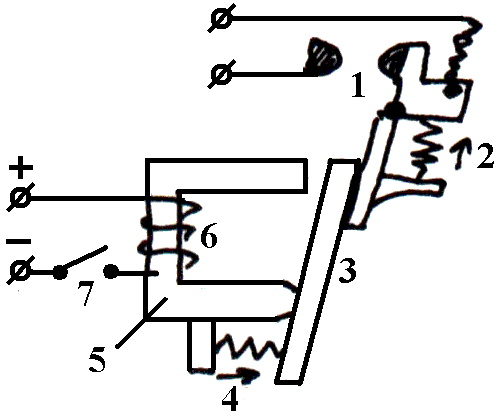 - силовые контакты; 2- притирающая пружина, 3-якорь; 4-отключающая пружина; 5-сердечник; 6- катушка управления; 7-кнопка управления.
- силовые контакты; 2- притирающая пружина, 3-якорь; 4-отключающая пружина; 5-сердечник; 6- катушка управления; 7-кнопка управления.Электромагнитные контакторы могут иметь магнитную систему гашения дуги между размыкающимися силовыми контактами. Контакторы могут иметь прямоходовую подвижную систему и поворотную. При прямоходовой подвижной системе через силовые контакты допускается ток до 50А, при поворотной системе – до 150А. По принципу электромагнитных контакторов работают и электромагнитные реле, которые в отличие от контакторов не имеют силовых контактов, дугогасительных устройств, и имеют блокировочные контакты.
20.3.2.Электропневматичекие контакторы
1
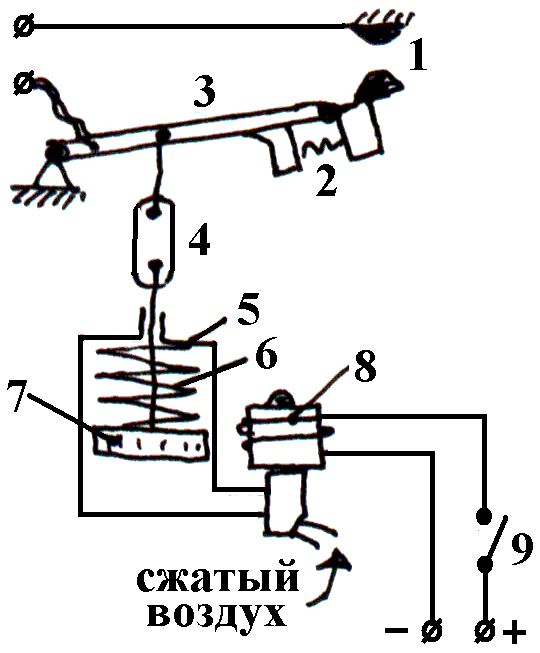 -силовые, контакты; 2-притирающая пружина; 3-поворотный рычаг; 4-изоляционная тяга; 5-пневмоцилиндр; 6-отключающая пружина; 7-поршень; 8-электромагнитный вентиль с катушкой управления; 9-кнопка управления.
-силовые, контакты; 2-притирающая пружина; 3-поворотный рычаг; 4-изоляционная тяга; 5-пневмоцилиндр; 6-отключающая пружина; 7-поршень; 8-электромагнитный вентиль с катушкой управления; 9-кнопка управления.При подаче напряжения на катушку вентиля вентиль пропускает воздух в пневмоцилиндр под поршень. Поршень поднимается вверх, преодолевая усилие пружины, и через тягу поворачивает рычаг и замыкает силовые контакты. При снятии напряжения с катушки вентиль из под поршня выпускает воздух в атмосферу. Под действием пружины поршень опускается вниз, и далее размыкая контакты. Электропневматические контакторы могут иметь систему дугогашения. Электропневматические контакторы из-за большой величины контактного нажатия применяются для переключения электрических цепей с большими токами. Но электропневматические контакторы имеют большие габариты, значительный вес и требуется подвод сжатого воздуха.
20.3.3. Реверсор
Служит для изменения направления тока в обмотках возбуждения тяговых электродвигателей с целью реверсирования или изменения направления вращения якорей двигателей, а значит и для изменения направления движения локомотива. Реверсор, это групповой переключатель с электропневматическим приводом на два положения. Контакторные элементы выполнены без дугогашения, поэтому переключают реверсор при обесточенных силовых цепях.
21. Требования к расположению электрического оборудования
1. Исключить попадание людей под напряжение.
2. Обеспечение необходимых изоляционных расстояний.
3. Удобство управления.
4. Удобство технического обслуживания и ремонта;
5. Обеспечение охлаждения;
6. Обеспечение защиты от загрязнений и атмосферных осадков;
7.Обеспечение минимальной длины проводов, воздухопроводов, трубопроводов;
8. Равномерное распределение нагрузки от сил тяжести;
9. Удаление от поста управления оборудования, издающего шум при работе.
22. Особенности пуска двигателя постоянного тока.
Различают непосредственный и управляемый способы пуска двигателей в ход. Управляемый способ пуска в свою очередь делится на реостатный и трансформаторный. Если для тягового электродвигателя с Uн = 1500 В, Rдв = 0,1 Ом Если применить непосредственный пуск, то получим:
 , при пуске n = 0, значит Е = 0, и
, при пуске n = 0, значит Е = 0, и 
Недопустимо!
Трансформаторный пуск применяется на ЭПС постоянного тока и ЭПС двойного питания.
Регулирование скоростей движения на ЭПС постоянного тока
При реостатном пуске все двигатели включаются последовательно и последовательно с ними включается реостат.
 , где n – количество тяговых двигателей на ЭПС. По мере разгона частота вращения двигателей увеличивается, противо э.д.с. E = CE x φ x n возрастает, и ток понижается, вызывая понижение силы тяги Fк. При дальнейшем разгоне для поддержания величины пускового тока, а значит силы тяги по мере роста противо э.д.с. сопротивление реостата уменьшают переключением контактов группового переключателя с электропневматическим приводом. После полного вывода реостата будет первая ходовая позиция и напряжение на каждом двигателе
, где n – количество тяговых двигателей на ЭПС. По мере разгона частота вращения двигателей увеличивается, противо э.д.с. E = CE x φ x n возрастает, и ток понижается, вызывая понижение силы тяги Fк. При дальнейшем разгоне для поддержания величины пускового тока, а значит силы тяги по мере роста противо э.д.с. сопротивление реостата уменьшают переключением контактов группового переключателя с электропневматическим приводом. После полного вывода реостата будет первая ходовая позиция и напряжение на каждом двигателе  , где n – количество последовательно соединенных двигателей.
, где n – количество последовательно соединенных двигателей.Для дальнейшего разгона тяговые двигатели переключают в две параллельные ветви. Последовательно с ними вновь вводится реостат, сопротивление которого уменьшают по мере разгона. И после полного вывода реостата будет вторая ходовая позиция. Напряжение на каждом двигателе будет в 2 раза больше напряжений первой ходовой позиции.
Для дальнейшего увеличения скорости движения тяговые двигатели переключают в параллельные ветви по два последовательно соединенных двигателя в каждой параллельной ветви. Вновь вводится реостат. А после полного его вывода будет третья ходовая позиция и напряжение на каждом двигателе
 .
.На ЭПС постоянного тока всего три ходовых позиции, на которых допускается длительная езда. На позициях, когда включен реостат, не допускается длительная езда из-за исключения перегрева реостата. Подобные позиции называются реостатными.
Недостатками регулирования скорости на ЭПС постоянного тока являются:
- малое число ходовых позиций;
- потери электроэнергии на реостатах, которая выделяется в виде тепла.
23. Расчет ступеней пускового реостата. Пусковая диаграмма.
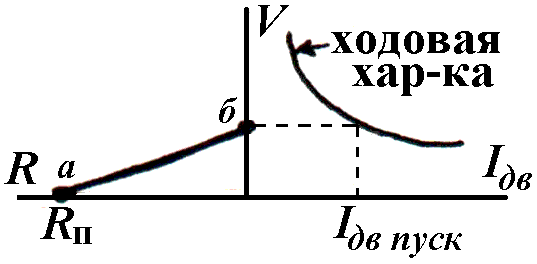
Выполняется графическим способом. Рассмотрим для одного двигателя. Скорость
 . При одно и том же U при большем Rп скорость V будет ниже. Таким образом, скоростная характеристика при большем Rп располагается ниже.
. При одно и том же U при большем Rп скорость V будет ниже. Таким образом, скоростная характеристика при большем Rп располагается ниже. . Величина Rп должна быть такой, чтобы обеспечить в первый момент небольшой Iпуск, небольшую Fк для плавного натяжения автосцепных устройств. Затем нужно уменьшить Rп, чтобы увеличить Iдв пуск и Fк для превышения сил сопротивления. С увеличением скорости V ток уменьшается. Для сохранения ускорения необходимо уменьшить Rп.
. Величина Rп должна быть такой, чтобы обеспечить в первый момент небольшой Iпуск, небольшую Fк для плавного натяжения автосцепных устройств. Затем нужно уменьшить Rп, чтобы увеличить Iдв пуск и Fк для превышения сил сопротивления. С увеличением скорости V ток уменьшается. Для сохранения ускорения необходимо уменьшить Rп.  (это из первой формулы). При неизменных U,
(это из первой формулы). При неизменных U, Iдв пуск, φ зависимость Rп от V иметь прямую линию. При V = 0
 . Это будет первая точка зависимости Rп(V), а вторую точку этой прямой зависимости определяем по скоростной ходовой характеристике (Rп = 0).
. Это будет первая точка зависимости Rп(V), а вторую точку этой прямой зависимости определяем по скоростной ходовой характеристике (Rп = 0).Н
 о плавно изменить величину Rп при мощных двигателях невозможно, поэтому используют ступенчатое изменение Rп.
о плавно изменить величину Rп при мощных двигателях невозможно, поэтому используют ступенчатое изменение Rп.Задаются Iдв max при пуске, учитывается коэффициент неравномерности пускового тока:
Коэффициент Кн для электровозов принимается 0,04÷0,08, для электропоездов до 0,15 при ускорении 0,4÷0,5 м/с2 и до 0 при ускорении 0,6÷0,7 м/с2.
С учетом запаса по коммутации принимается Iдв пуск = 1,3÷1,5 Iдв час и соответственно, Iдв max = 1,5÷1,7 Iдв час.
Из за ограничения по сцеплению определяют среднее значение силы тяги: Fк сц пуск = 1000 mл x g x ψn, где mл – масса локомотива, g – ускорение свободного падения, ψn - коэффициент сцепления.
Затем по электротяговой характеристике по Fк сп пуск определяют I вд пуск, а по заданному Кн→Iдв max и Iдв min.
Затем изображается скоростная характеристика V(Iдв), справа от нее указываются две прямые Rп(V) при Iдв max и Iдв min, рассчитанные по способу указанному выше.
I
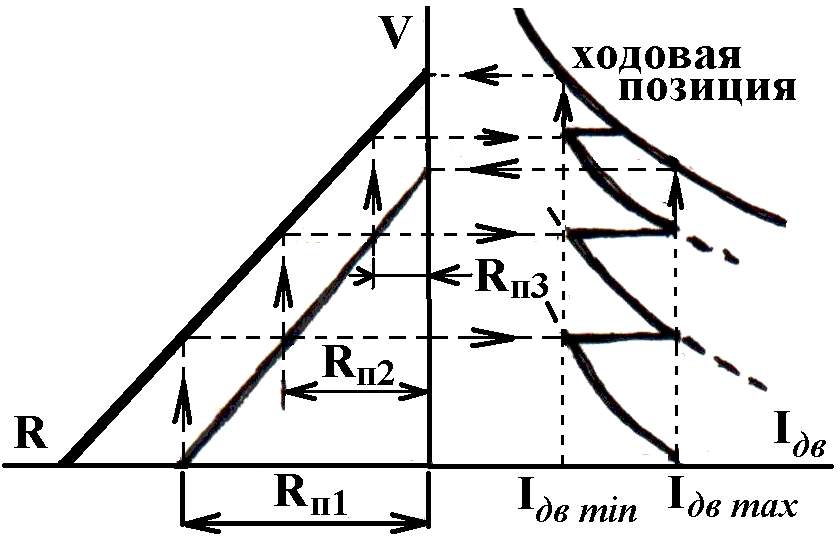 дв max получаем при Rп1, если бы Rп изменялось по наклонной прямой при увеличении скорости, то это бы происходило при неизменном Iдв max. Но Rп не меняется, поэтому при увеличении V увеличивается Е, значит уменьшается Iдв, и V изменяется по кривой. При уменьшении тока до Iдв min машинист выключает секцию реостата (или выключается с помощью реле ускорения). Уменьшение Rп происходит практически при неизменной скорости до Rп2, величина которого должна быть такой, чтобы не превысить Iдв max. Увеличился Iдв, Увеличивается Fк дв и увеличивается V, и т.д. Выход на ходовую скоростную характеристику может произойти при Iдв между Iдв max и Iдв min (как в данном случае). Чтобы этого не получилось, построение начинать сверху и получим Rп1 несколько большим и Iдв пуск несколько меньшим Iдв max. Таким образом, построили пусковую диаграмму .
дв max получаем при Rп1, если бы Rп изменялось по наклонной прямой при увеличении скорости, то это бы происходило при неизменном Iдв max. Но Rп не меняется, поэтому при увеличении V увеличивается Е, значит уменьшается Iдв, и V изменяется по кривой. При уменьшении тока до Iдв min машинист выключает секцию реостата (или выключается с помощью реле ускорения). Уменьшение Rп происходит практически при неизменной скорости до Rп2, величина которого должна быть такой, чтобы не превысить Iдв max. Увеличился Iдв, Увеличивается Fк дв и увеличивается V, и т.д. Выход на ходовую скоростную характеристику может произойти при Iдв между Iдв max и Iдв min (как в данном случае). Чтобы этого не получилось, построение начинать сверху и получим Rп1 несколько большим и Iдв пуск несколько меньшим Iдв max. Таким образом, построили пусковую диаграмму .Чтобы построить реостатные характеристики, необходимо брать большее количество значений тока при данном Rп. Предусматриваются и другие значения Rп для получения меньших значений пускового тока для маневровых позиций, а также для переходных позиций при переход с «С» на «СП», на «П». На электровозах предусматривают 4÷8 маневровых позиций, на электропоездах – одну. Rп для электровоза = n x Rn дв / а, n – количество последовательно соединенных двигателей, а – число параллельных ветвей.
Например на ВЛ10 – 37 позиций, ходовые 16,27,37; с 1 по 8 маневровых; 17,18,19 и 28,29,30 – переходные. На переходных позициях происходит уменьшение тока, а значит и силы и тяги, и чтобы это на сказалось на разгоне поезда, машинист на задерживается на этих позициях.