Краткий курс лекций по дисциплине «Электрические железные дороги» специальность 180700
| Вид материала | Курс лекций |
- Краткий курс лекций по дисциплине «Подвижной состав железнодорожного транспорта» специальность, 910.14kb.
- Открытое акционерное общество "российские железные дороги", 198.35kb.
- Методические указания: краткий курс лекций для студентов заочной формы обучения Санкт-Петербург, 1540.61kb.
- Краткий курс лекций, 182.24kb.
- Н. В. Рудаков Краткий курс лекций, 1552.23kb.
- Открытое акционерное общество "российские железные дороги", 1369.07kb.
- В. Б. Аксенов Краткий курс лекций, 1098.72kb.
- Краткий курс лекций по медицинской паразитологии Часть Клещи, 643.33kb.
- Краткий курс лекций по философии учебно-методическое пособие для студентов всех специальностей, 2261.57kb.
- Учебно-методический комплекс дисциплины История английской литературы Специальность, 473.74kb.
9.К.П.Д. тяговой сети и системы электроснабжения.
К.П.Д. электрической тяги определяется перемножением К.П.Д. отдельных звеньев системы электроснабжения:
ηтепл.эл.станции х ηЛЭП х ηт.п. х ηт.с. х ηэл-ва = ηэл.тяги
0,4 х 0,95 х 0,98 х 0,94 х 0,85 = 0,3 или 30 %
ηГЭС = 0,9, тогда ηэл.тяги = 0,67 или 67 %
Электроподвижной состав потребляет примерно 5 % всей вырабатываемой в России электроэнергии.
10.Электрическое сопротивление тяговой сети.
Для системы постоянного тока: контактный провод и несущий трос – медные, усиливающие провода – алюминиевые. Алюминий в 1,7 раза обладает меньшей проводимостью и вводится медный эквивалент Sалюм / 1,7. Контактная сеть – двойной контактный провод 2 х 100 мм2 (2МФ – медный, фасонный), несущий трос 120 мм2 (М – 120), два усиливающих алюминиевых провода 2 х 185 (2А х 185).
Sм = 2х100 + 120 + 2х185/1,7 = 540 мм2
ρмеди = 18,8 Ом х мм2/м
Сопротивление 1 км контактной сети:
Rк.е. = ρ/Sм = 18,8 / 540 = 0,035Ом.
Сопротивление 1км рельсов в Ом/км (двух рельсовых нитей одного пути) находятся на эмпирической формуле Rрельс = 1/G, где G – масса одного погонного метра рельса (указывается в типе рельса Р50 → 50 кг/м).
R рельса Р65 =1/65 = 0,0154Ом/км.
Для системы переменного тока сложнее: в земле под проводами создаются вихревые потоки, которые в контактной сети наводят Э.Д.С. взаимоиндукции и между проводами происходит взаимоиндукция. И учитывается уже эквивалентное сопротивление Z0, влияет так же сопротивление рельс – земля, какой грунт, балласт, шпалы, сухой или промерзший грунт.
Имеются специальные таблицы для однопутных или двухпутных участков, например:
для однопутного участка: М120+МØх100 и Р65→Z0=0,423Ом/км или ПБСМ95+МØх100 и Р65→Z0=0,531Ом/км;
для двухпутного участка: ПБСМ95+МØх100 и Р65 если питание раздельное, второй путь отключен и Z0 = 0,411Ом/км, а при параллельном питании и оба пути включены, то Z0 = 0,548Ом/км.
При М120+МØх100 и Р65 соответственно Z0 = 0,359Ом/км.
Несущий трос может и двойной ПБСМ2х70.
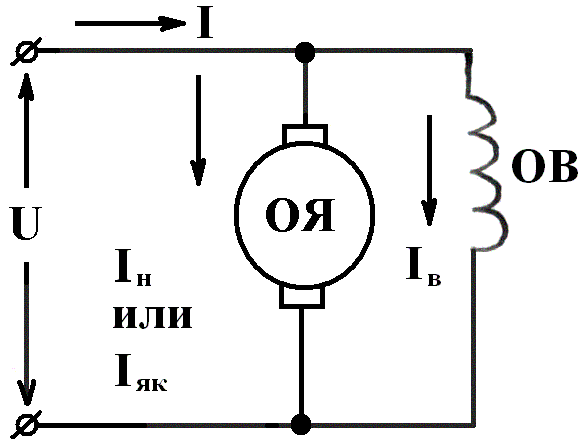
11. Общее устройство электродвигателя постоянного тока
и принцип его работы.
Тяговые электродвигатели служат для получения вращающихся моментов, которые через зубчатые передачи передаются на колесные пары и в результате сцепления колес с рельсами образуется сила тяги.
В качестве тяговых электродвигателей на отечественном электроподвижном составе, в основном, применяются электродвигатели постоянного тока, которые легко берут с места под нагрузкой и имеют простой способ регулирования частоты вращения якоря.
Неподвижная часть двигателя называется остов, который служит для механического соединения всех деталей двигателя и выполняет роль магнитопровода (по нему замыкается магнитный поток). К остову крепятся главные полюса, которые служат для создания основного магнитного потока. Главные полюс состоит из сердечника и катушки. Сердечник шихтованный, набирается из штампованных листов электртротехнической стали. Катушки всех полюсов соединяются последовательно и образуют обмотку возбуждения.
Подвижная вращающаяся часть электродвигателя называется якорем. Якорь имеет шихтованный сердечник из электротехнической стали, в пазы которого укладывается обмотка якоря. Все витки обмотки якоря соединяются последовательно. Выводы от проводников обмотки якоря впаиваются в петушки коллекторных пластин.
Коллектор состоит из отдельных изолированных друг от друга коллекторных пластин и обеспечивает изменения направления тока в проводниках обмотки якоря при переходе их через геометрическую нейтраль (линию, перпендикулярную оси полюсов) для того, чтобы выталкивающая сила, действующая на проводники обмотки якоря, всегда была направлена в одну сторону (для того, чтобы якорь вращался).
Концы вала якоря расположены в подшипниках щитов, которые крепятся к остову.
Полярность главных полюсов чередуется. Для изменения полярности полюсов необходимо изменить направление тока в обмотке возбуждения.
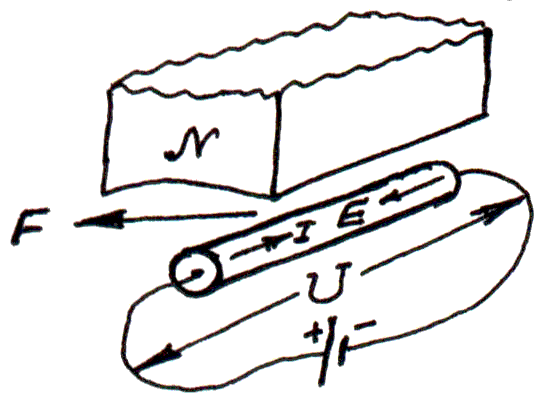
Принцип работы двигателя постоянного тока основан на выталкивании проводника с током из магнитного поля.
Е
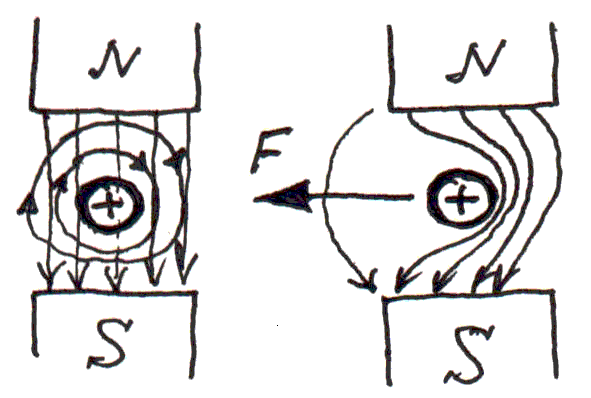 сли по проводнику пропускать электрический ток, то вокруг проводника образуется круговое магнитное поле, направление которого определяется по правилу буравчика. Если этот проводник поместить в магнитное поле полюсов, то в результате взаимодействия магнитного поля проводника с током с магнитным полем полюсов с одной стороны от проводника магнитное поле усиливается, а с другой – ослабевает. Магнитное поле обладает свойством упругости. На проводник будет действовать выталкивающая электромагнитная сила, стремящаяся вытолкнуть проводник с током из магнитного поля полюсов. Направление выталкивающей силы при этом определяется по правилу левой руки, а ее величина по закону Ампера: F = B x I x l, где В – электромагнитная индукция полюсов, I – величина тока, проходящего по проводнику, l – длина проводника.
сли по проводнику пропускать электрический ток, то вокруг проводника образуется круговое магнитное поле, направление которого определяется по правилу буравчика. Если этот проводник поместить в магнитное поле полюсов, то в результате взаимодействия магнитного поля проводника с током с магнитным полем полюсов с одной стороны от проводника магнитное поле усиливается, а с другой – ослабевает. Магнитное поле обладает свойством упругости. На проводник будет действовать выталкивающая электромагнитная сила, стремящаяся вытолкнуть проводник с током из магнитного поля полюсов. Направление выталкивающей силы при этом определяется по правилу левой руки, а ее величина по закону Ампера: F = B x I x l, где В – электромагнитная индукция полюсов, I – величина тока, проходящего по проводнику, l – длина проводника.Е
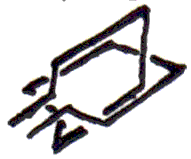
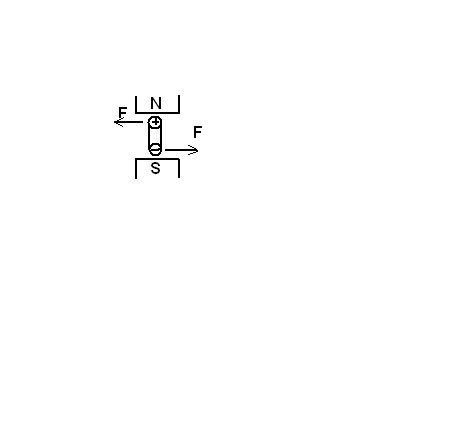 сли в магнитное поле полюсов поместить виток с током, то он повернется под действием пары сил до горизонтального положения в данном случае. А чтобы получить вращение, необходимо взять несколько витков.
сли в магнитное поле полюсов поместить виток с током, то он повернется под действием пары сил до горизонтального положения в данном случае. А чтобы получить вращение, необходимо взять несколько витков.Часть обмотки якоря между соседними по ходу обмотки якоря коллекторными пластинами называется секцией обмотки якоря. Секции обмотки якоря выполняются, как правило, одновитковыми. Чтобы якорь вращался, активные стороны каждого витка располагаются под полюсами разной полярности.
Обмотка якоря может быть по типу: простая петлевая, простая волновая, сложная петлевая, сложная волновая, смешанная.
12. Параметры двигателя постоянного тока :
 1. Ток нагрузки (ток якоря):
1. Ток нагрузки (ток якоря):После подачи напряжения на обмотки двигателя якорь начинает вращаться. Проводники обмотки якоря будут пересекать магнитное поле полюсов. В проводниках будет наводиться Э.Д.С., направленная против тока, а значит и против приложенного напряжения. Эта Э.Д.С. получила название противо Э.Д.С. Поэтому,пользуясь законом Ома:
Ток нагрузки прямопропорционален приложенному напряжению за минусом противо Э.Д.С. и обратнопропорционален сопротивлению обмотки якоря.
Противо Э.Д.С. – это Э.Д.С., которая индуктируется в проводниках обмотки якоря работающего двигателя постоянного тока; направлена против тока, а значит и против приложенного напряжения.
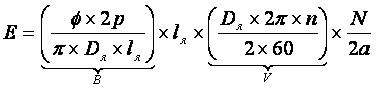
2. Противо Э.Д.С.:
E = B x l x V - закон Фарадея
B = φ/S; Sодного полюса = π x Dяк x lяк / 2p, где 2р – число полюсов двигателя.
V = Dя х ω / 2; ω = 2π х n / 60;
N – число активных проводников обмотки якоря (в одном витке обмотки якоря два активных проводника).
N/2 - число активных проводников в одной параллельной ветви.
2а – число параллельных ветвей обмотки якоря.
 и после сокращений
и после сокращений 
где
 - конструктивный коэффициент, постоянный для данного типа электрической машины.
- конструктивный коэффициент, постоянный для данного типа электрической машины.Противо Э.Д.С. прямопропорциональна магнитному потоку полюсов, частоте вращения якоря и зависит от конструкции электрической машины.
3. Частота вращения якоря:
;
Частота вращения якоря прямопропорциональна приложенному напряжению за минусом падения напряжения в обмотке якоря (для двигателя с параллельным возбужденим) или в обмотках двигателя (для двигателя с последовательным возбуждением), обратно пропорциональна магнитному потоку полюсов и зависит от конструкции машины.
4. Вращающий момент:

; ; ;

Вращающий момент прямопропорционален магнитному потоку полюсов, току нагрузки и зависит от конструкции машины.
13. Свойства двигателя постоянного тока:
1. Саморегулирование.
Под саморегулированием двигателей постоянного тока понимается автоматическое выравнивание вращающего момента с моментом сопротивления. При изменении момента сопротивления изменяется частота вращения якоря, затем противо Э.Д.С., ток нагрузки, а за ним и вращающий момент, который по величине сравнивается с изменившимся моментом сопротивления.
2. Обратимость.
Под обратимостью электрических машин постоянного тока понимается их способность работать как в режиме двигателя, так и в режиме генератора.
Что необходимо сделать, чтобы электрическая машина работала в режиме двигателя, или в режиме генератора? На обмотки двигателя подать напряжение, а у генератора вращать якорь внешней механической силой.
При этом необходимо объяснить:
… как направлены между собой выталкивающая сила, действующая на проводники обмотки якоря, и направление вращения якоря (в электродвигателе совпадают по направлению, а в генераторе направлены встречно);
… как направлены между собой ток и индуктируемая в обмотке якоря Э.Д.С. (в электродвигателе направлены встречно, а в генераторе совпадают по направлению);
… что больше: индуктируемая Э.Д.С. в обмотке якоря или напряжение на зажимах обмотки якоря (в генераторе Э.Д.С. больше напряжения, а в электродвигателе напряжение больше Э.Д.С. и в обоих случаях на величину падения напряжения в обмотках электрической машины или в обмотке якоря в зависимости от способа возбуждения электрической машины).
14. Сущность электрического торможения.
При электрическом торможении тяговые электродвигатели переходят в генераторный режим. Их якоря получают вращение через зубчатую передачу от вращения колесных пар за счет запасенной кинетической энергии поезда или при движении под уклон. На проводники обмотки якоря каждого электродвигателя будет действовать выталкивающая сила, направленная против вращения якоря, затормаживающая вращение якоря, а через зубчатую передачу затормаживающая вращение колесной пары.
В случае подключения к обмотке якоря резистора электроэнергия, вырабатываемая электродвигателем, будет гаситься на резисторе – выделяется в виде тепла. За счет изменения величины сопротивления резистора можно регулировать величину тормозной силы. Такой способ электрического торможения называется реостатным.
В случае передачи электроэнергии от электродвигателя в контактную сеть электрическое торможение называется рекуперативным. Рекуперативное торможение возможно в случае превышения вырабатываемой электродвигателем Э.Д.С. напряжения контактной сети. Это невозможно при последовательном возбуждении тяговых двигателей, которые используются в режиме тяги. При переходе в режим рекуперативного торможения, тяговые двигатели переключают на независимое возбуждение.
На электровозах переменного тока с тяговыми двигателями постоянного тока применение рекуперативного торможения затруднено, т.к. тяговые двигатели вырабатывают постоянное напряжение, которое при передаче в контактную сеть необходимо преобразовать (инвертировать) в переменное напряжение. Это стало возможным с применением управляемых вентилей – тиристоров, которые при рекуперативном торможении переключаются с частотой переменного тока. На электровозах переменного тока сейчас устанавливают выпрямительные установки, собираемые на тиристорах. В режиме тяги установка выполняет роль выпрямителя, а в режиме рекуперативного торможения – роль инвертора.
Преимущества электрического торможения: экономия тормозных колодок, простота управления на спусках, а при рекуперативном торможении и экономия электроэнергии.
15. Электромеханические характеристики
электродвигателей постоянного тока.
В зависимости от способа подачи напряжения на обмотку возбуждения и обмотку якоря электрические машины постоянного тока делятся на:
1. генераторы (двигатели) с независимым возбуждением;
2. генераторы (двигатели) с самовозбуждением.
В зависимости от способа соединения обмотки якоря и обмотки возбуждения электрические машины с самовозбуждением делятся на:
1. генераторы (двигатели) с параллельным возбуждением;
2. генераторы (двигатели) с последовательным возбуждением;
3. генераторы (двигатели) смешанного возбуждения, имеют две обмотки возбуждения.
Электромеханические характеристики снимаются на электродвигателе - одна величина электрическая (Iн), другая- механическая (n или Мвр).
Электромеханические характеристики – это скоростная электромеханическая характеристика зависимости частоты вращения якоря от тока нагрузки n(Iн) и характеристика зависимости вращающего момента от тока нагрузки Мвр(Iн). Электромеханические характеристики снимаются при неизменном подаваемом напряжении.
15.1. Электродвигателя с параллельным возбуждением.
П
 ри изменении нагрузки (при изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и не будет изменяться в обмотке возбуждения.
ри изменении нагрузки (при изменении момента сопротивления) будет изменяться ток только в обмотке якоря, и не будет изменяться в обмотке возбуждения.Mвр = См х ф х Iн ; С м = Const, ф = Const т.к. Iв = Const
Вращающийся момент зависит только от тока нагрузки и характеристика будет иметь вид прямой линии.
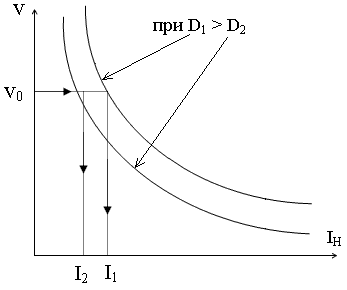
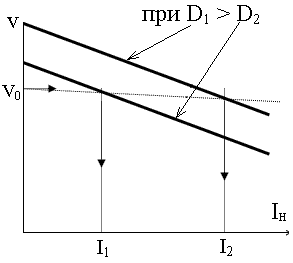
 Зависимость вращающегося момента от тока нагрузки. |  Скоростная электромеханическая характеристика. |
 , U =Const, С E = Const, ф = Const
, U =Const, С E = Const, ф = ConstПри увеличении нагрузки частота вращения якоря будет уменьшаться только из-за увеличения падения напряжения в обмотке якоря. Но, т.к. сопротивление обмотки якоря мало, то и падение напряжения в обмотке якоря мало и составляет примерно 4 % от номинального напряжения при номинальном токе. Характеристика будет иметь вид прямой линии с малым наклоном и называется жесткой (когда при изменении одной величины в широких пределах другая величина изменяется незначительно).
При уменьшении нагрузки частота вращения якоря увеличивается, противо Э.Д.С. возрастает и при какой-то n0 величина наводимой в обмотке якоря Э.Д.С. сравнивается с приложенным напряжением.

При дальнейшем разгоне Э.Д.С. становится выше приложенного напряжения, ток по обмотке якоря пойдет в другом направлении уже под действием Э.Д.С. – двигатель автоматически перешел в генераторный режим.
Электромеханические характеристики для двигателя с независимым возбудителем, имеют внешний вид, подобный электромеханическим характеристикам двигателя с параллельным возбуждением из-за Ф = Const.
15.2.Электродвигателя с последовательным возбудителем.
Ток нагрузки равен току якоря и току возбуждения. При изменении нагрузки будет изменяться ток в обмотке якоря и одновременно в обмотке возбуждения, а, значит, будет изменяться и магнитный поток в соответствии с кривой намагничивания
 | 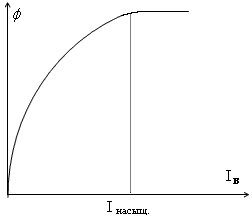 Кривая намагничивания. |
Mвр = См х Ф х Iн ; Ф = Iн х w / R магн ; Mвр = См х w/Rмагн х I2н,
где w - число витков.
Вращающий момент зависит от тока в квадрате и характеристика будет иметь вид параболы. Так происходит до магнитного насыщения полюсов. При дальнейшем увеличении нагрузки магнитный поток будет оставаться неизменным, вращающий момент будет зависеть только от тока и характеристика переходит в прямую линию.
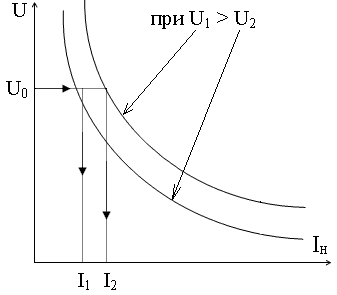
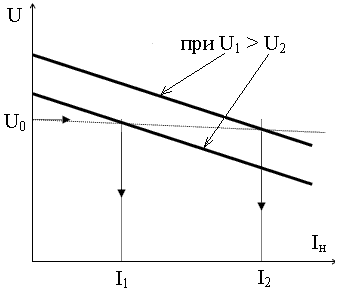
 Зависимость вращающегося момента от тока нагрузки. | 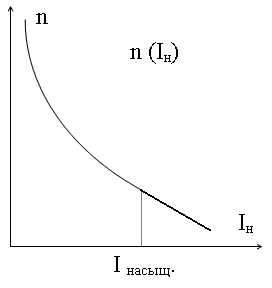 Скоростная электромеханическая характеристика. |
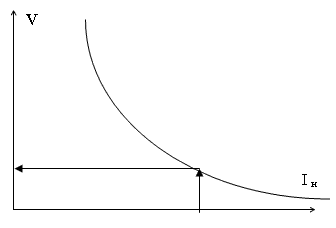
П
 ри увеличении нагрузки частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в обмотках двигателя и, в большей степени, из-за увеличения магнитного потока, что вызывает резкое понижение частоты вращения якоря. По мере роста тока нагрузки замедляется рост магнитного потока, а затем наступает магнитное насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении нагрузки магнитный поток остается постоянным, частота вращения якоря понижается только из-за увеличения падения напряжения в
ри увеличении нагрузки частота вращения якоря будет уменьшаться из-за увеличения падения напряжения в обмотках двигателя и, в большей степени, из-за увеличения магнитного потока, что вызывает резкое понижение частоты вращения якоря. По мере роста тока нагрузки замедляется рост магнитного потока, а затем наступает магнитное насыщение полюсов (см. выше кривую намагничивания). При дальнейшем увеличении нагрузки магнитный поток остается постоянным, частота вращения якоря понижается только из-за увеличения падения напряжения в обмотках двигателя. Характеристика переходит в прямую линию.
Скоростная электромеханическая характеристика мягкая.
При уменьшении нагрузки частота вращения увеличивается, но уменьшается и магнитный поток. Поэтому, наводимая противо Э.Д.С. в обмотке якоря не может преодолеть приложенное напряжение. Электродвигатели с последовательным возбуждением автоматически не переходят в генераторный режим.
16. Преимущества и недостатки электродвигателя
с последовательным возбуждением.
Преимущества:
1. Позволяют брать с места поезда большего веса, т.к. вращающий момент зависит не просто от тока нагрузки, а от тока в квадрате, величина которого при пуске большая.
2. Позволяют брать плавно поезда с места, т.к. при большой величине пускового тока частота вращения якоря небольшая.
3. Позволяет водить поезда без перегрузки тяговых двигателей, т.к. при изменении момента сопротивления одна величина увеличивается, другая величина уменьшается, а их произведение остается почти неизменным.
(Мощность
 )
) 4. Не переходят автоматически в генераторный режим, что позволяет перед подъемом раньше включиться в режим тяги и вместе с запасенной кинетической энергией поезда легче преодолеть подъем.
5. Не происходит перегрузки двигателей, расположенных на колесных парах с большими диаметрами бандажей колесных пар (не требуется точного подбора колесных пар по их диаметру).
 |  |
6. Колебания напряжения в контактной сети не вызывают резких толчков в поезде (не происходит большого броска тока нагрузки).
 |  |
7. Обмотка возбуждения проще по конструкции – для создания необходимого магнитного потока при небольших токах возбуждения, равным токам нагрузки, требуется меньшее число витков обмотки возбуждения; сечение «меди» обмотки возбуждения больше и из-за малого электрического сопротивления обмотки возбуждения не требуется усиленной межвитковой изоляции.
Недостатком электродвигателей с последовательным возбуждением является их склонность к боксованию (при резком уменьшении Мсопр частота вращения якоря резко возрастает), что объясняется мягкостью скоростной характеристики.
17. Образование электрической тяги.
 При подаче U на обмотки тягового двигателя по его обмотках течет ток. Образуется вращающий момент. Якорь тягового двигателя вращается и через зубчатую передачу вращающий момент передается на колесную пару Мк. Колесо колесной пары прижато к рельсу с силой Р0. Вращающий момент Мк можно заменить парой сил F1 и F2. Сила F1 приложена к центру колеса О, а сила F2 – к ободу колеса в точке А касания его с рельсом. Рельс закреплен! Под действием сил F2 и Р0 возникнут равные им и противоположно направленные реакции со стороны рельса, выраженные силами Fк и R, которые являются внешними силами. Сила R направлена вертикально и не влияет характер движения. Сила реакции рельса Fк и является силой тяги. За счет сцепления колеса с рельсом возникает необходимый упор. При этом силы F2 и Fк уравновешиваются. Под действием силы F1 колеса поворачиваются относительно точки А, как мгновенного центра вращения. Так как мгновенный центр вращения при этом перемещается по поверхности головки рельса слева направо, то и центр колеса (точка О) поступательно движется в том же направлении.
При подаче U на обмотки тягового двигателя по его обмотках течет ток. Образуется вращающий момент. Якорь тягового двигателя вращается и через зубчатую передачу вращающий момент передается на колесную пару Мк. Колесо колесной пары прижато к рельсу с силой Р0. Вращающий момент Мк можно заменить парой сил F1 и F2. Сила F1 приложена к центру колеса О, а сила F2 – к ободу колеса в точке А касания его с рельсом. Рельс закреплен! Под действием сил F2 и Р0 возникнут равные им и противоположно направленные реакции со стороны рельса, выраженные силами Fк и R, которые являются внешними силами. Сила R направлена вертикально и не влияет характер движения. Сила реакции рельса Fк и является силой тяги. За счет сцепления колеса с рельсом возникает необходимый упор. При этом силы F2 и Fк уравновешиваются. Под действием силы F1 колеса поворачиваются относительно точки А, как мгновенного центра вращения. Так как мгновенный центр вращения при этом перемещается по поверхности головки рельса слева направо, то и центр колеса (точка О) поступательно движется в том же направлении.Сумма сил Fк всех движущих колесных пар локомотива называется силой тяги локомотива.
Сила тяги Fк не должна превышать силу сцепления колеса с рельсом. тягового двигателя. Fк ≤Fк сцеп. В противном случае колесо теряет упор и начнется проскальзывание - боксование. Сила сцепления определяется произведением силы Р0 на коэффициент сцепления колеса с рельсом – Fсцеп = P0 x ψ.
Для локомотива Fсцеп = mл x g x ψ, где mл - масса локомотива, g – 9,81 м/с2 – ускорение свободного падения, ψ – коэффициент сцепления.
Коэффициент сцепления зависит от материала рельса и колес, состояния их поверхностей, от скорости движения.
Расчетный коэффициент сцепления локомотива ψк определяют по эмпирическим формулам для различных типов локомотивов и отдельно в кривых малого радиуса R менее 500 м, например для электровозов переменного тока:

Природу силы сцепления часто объясняют наличием шероховатостей на поверхностях колеса и рельса. При таком рассуждении можно считать, что при наличии отшлифованных поверхностей сила сцепления меньше. Однако практика доказывает, что при чистых и хорошо обработанных поверхностях сила сцепления выше. Сцепление колес с рельсами объясняется молекулярным сцеплением. Для увеличения сцепления колес с рельсами используют сухой кварцевый песок, который разрушает поверхностные пленки и твердые частицы внедряются в контактируемые поверхности.
Под каждое колесо электровоза нужно подавать песок 400-700 г/мин летом и 900-1500 г/мин зимой.
Склонность колесных пар к боксованию возрастает с увеличением проката бандажей свыше 3÷4 мм и износа рельсов вследствие изменения формы и размеров площадки, по которой соприкасаются колесо и рельс.
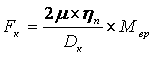
Вращающий момент, действующий на колесо Мк = М х μ x ηn, где М – вращающий момент на валу якоря тягового двигателя, μ - передаточное отношение зубчатой передачи, которое определяется отношением числа зубьев зубчатого колеса к числу зубьев шестерни μ= Zk / Zш , ηn – К.П.Д. зубчатой передачи и моторно-осевых подшипников, который принимается равным 0,975.
Сила F1 действует на буксу и по III закону Ньютона букса на колесо действует с силой F3. Пара сил F3 и Fк определяют момент. Для условия равновесия колеса Fк х Dк / 2 = Мк, отсюда Fк = 2 Мк / Dк, или
Мощность электродвигателя Pдв = Uдв х Iн х ηn, а так же Pдв = Fк х V (H х км/ч), переводим км/ч в м/с - 1000/(60х60) = 1/3,6
Pдв = Fк х V / 3,6, отсюда
 ;
;Сила тяги электровоза:
 , где N – число двигателей электровоза.
, где N – число двигателей электровоза.17. Перерасчет электромеханических характеристик
на электротяговые характеристики.
В электротяговых характеристиках одна величина электрическая (Iн), другая – связанная с тягой (V – скорость движения или Fк – сила тяги). Электротяговые характеристики – это скоростная электротяговая характеристика V(Iн) и характеристика зависимости силы тяги от тока нагрузки Fк (Iн). Цифровые переходные коэффициенты единиц измерения для простоты рассуждения упускаем.
1
 .
. 2
 .
.По электромеханическим характеристикам при разных значениях тока нагрузки Iн определяем частоту вращения якоря nдв и вращающий момент Мвр. Их значения умножаем, соответственно, на
 и
и  . Получаем для каждого выбранного значения тока нагрузки Iн соответствующие значения скорости движения V и силы тяги Fк. Получаем электротяговые характеристики, похожие на электромеханические характеристики.
. Получаем для каждого выбранного значения тока нагрузки Iн соответствующие значения скорости движения V и силы тяги Fк. Получаем электротяговые характеристики, похожие на электромеханические характеристики.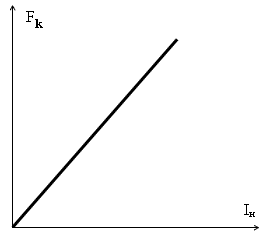

По двум электротяговым характеристикам при одном и том же значении тока нагрузки Iнί можно определить значение скорости движения Vί и значение силы тяги Fкί . По полученным значениям при разных значениях тока нагрузки Iнί получим тяговую характеристику зависимости скорости движения от силы тяги V(Fк).