
11. Лекция: Сложные поверхности и основы планирования управления роботом-станком для их воспроизведения
| Вид материала | Лекция |
- Рабочая программа дисциплины «маркетинг персонала» Рекомендуется для направления подготовки, 153.5kb.
- Рабочая программа дисциплины «Психофизиология профессиональной деятельности» Рекомендуется, 196.33kb.
- Кафедра ТиМ легкой атлетики Перечень контрольных работ для студентов 6 курса заочной, 102.02kb.
- Введение Основы теории коррозии, 479.15kb.
- Информационные технологии управления лекция 6 Информационные системы планирования (бюджетирования), 41.66kb.
- А. Н. Туполева кафедра Телевидения и мультимедийных систем устройства записи и воспроизведения, 764.84kb.
- Интернет-Университет Информационных Технологий, 1012.47kb.
- Рабочая программа дисциплины «основы кадровой политики и кадрового планирования» Рекомендуется, 169.77kb.
- Рабочая программа по дисциплине «основы менеджмента», 79.24kb.
- И. И. Ползунова Бийский технологический институт Л. Г. Миляева основы планирования, 1373.58kb.
11. Лекция: Сложные поверхности и основы планирования управления роботом-станком для их воспроизведения.
В лекции приведена методика описания фасонных поверхностей с применением подвижного трехгранника. В качестве подвижного трехгранника рассматриваются единичные векторы, пересекающиеся под прямым углом (трехгранник Фрэне). Предложенный метод позволяет применить единый аппарат однородных матричных преобразований для формирования управления обобщенными координатами, так как описание сложной поверхности представляет аналогичный аппарат матричных преобразований. Фасонная поверхность описывается полиномами Лагранжа, которые в отличие от описания сплайн-функциями позволяют получать гладкие сопряжения при задании поверхности опорными точками.
Сложные поверхности
При создании системы управления процессом механической обработки деталей с использованием многозвенных манипуляционных механизмов возникает необходимость экономного описания этого процесса, в том числе описания геометрического контура обрабатываемой поверхности. При этом следует отметить, что метод описания геометрии обрабатываемой поверхности определяет принципы построения систем управления манипуляционными механизмами, а такжесистемы распознавания геометрических параметров. Геометрия обрабатываемой поверхности определяет также требуемое количество степеней подвижности манипулятора, необходимое для выполнения данной операции.
Поверхности реальных машиностроительных деталей
Поверхности реальных машиностроительных деталей, имеющих сферическую, цилиндрическую, коническую или иную форму, могут быть заданы следующими параметрами: радиусами кривизны, кручения и координатами опорных точек или линий. Перемещение инструмента по траектории на обрабатываемой поверхности от одной опорной точки к другой может быть задано как перемещение по траектории с заданными радиусами кривизны и кручения.
Форма поверхности образуется режущей кромкой инструмента, который перемещается по траектории на обрабатываемой детали. Эта траектория выбирается таким образом, чтобы при движении по ней режущей кромки инструмента образовывалась требуемая поверхность.
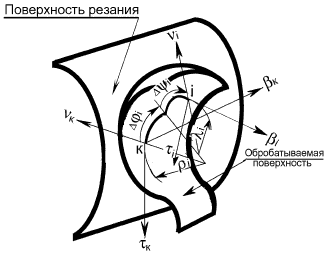
Рис. 11.1.
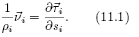
При движении инструмента по траектории, расположенной на поверхности обрабатываемой детали (рис. 11.1), ось сопровождающего трехгранника (трехгранника Фрэне) τi направлена по касательной к траектории, νi — по нормали, а βi — по бинормали к поверхности, на которой расположена траектория. Основные параметры, характеризующие траекторию в пространстве, — это текущие линейные координаты траектории, радиус кривизны ρi и радиус кручения λi. Радиус кривизны ρi в i–й точке траектории направлен вдоль оси νi и определяется как производная вектора τi по дуге si
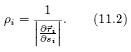
Величина радиуса кривизны ρi в каждой i–й точке поверхности вычисляется через модуль производной
Цилиндрическая поверхность полностью может быть задана координатами опорных точек траектории, радиусами кривизны ρi и направляющими косинусами осей νi и βi, причем для цилиндрической поверхности направляющие косинусы оси βi постоянны для всех опорных точек.
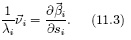
Радиус кручения λi (рис. 11.1) также направлен по оси νi и определяется как производная вектора βi по дуге si
Величина радиуса кручения λiв каждой i–й опорной точке поверхности вычисляется через модуль производной
При одновременном повороте с заданными радиусами кривизны ρi и кручения λi получается произвольная форма обрабатываемой поверхности.
Метод сопровождающего трехгранника.
Для записи обрабатываемой поверхности воспользуемся методом, описывающим перемещение подвижного трехгранника (τνβ)i относительно системы координат (XYZ)д, в которой задается поверхность. Положение трехгранника задается матрицей вида (10.1), которая является универсальной как для описания поверхности, так и для описания кинематической схемы сложного пространственного механизма
где
— подматрица направляющих косинусов осей подвижного трехгранника (τνβ)i относительно осей координатной системы (XYZ)д, дRi=[xiyizi]T — вектор, определяющий положение i–й точки поверхности в системе координат (XYZ)д. Матрица (10.1) может быть представлена в табличной форме (таблица 11.1), в которой k — номер опорной точки линии, Cij - направляющие косинусы осей сопровождающего трехгранника (τνβ)i относительно осей системыкоординат (XYZ)д, xi, yi, zi — координаты опорных точек траектории в системе координат (XYZ)д, ρi и λi — соответственно радиус кривизны и кручения в опорной точке.
| Таблица 11.1. | ||||||||||||||
| k | xi | yi | zi | c11 | c21 | c31 | c12 | c22 | c32 | c13 | c23 | c33 | ρi | λi |
| | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | |
| ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... | ... |
| | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | |
Для задания траектории на поверхности также используется перемещающийся трехгранник, в котором направление движения по траектории совпадает с осью τi. В зависимости от способа задания системы координат, относительно которой описывается обрабатываемая поверхность, и, соответственно, способа крепления детали, определяются алгоритмы управления манипуляционной системой. Кроме того, способ закрепления детали в захватном устройстве задаетколичество степеней подвижности манипулятора перемещения детали, необходимое для получения требуемой поверхности.
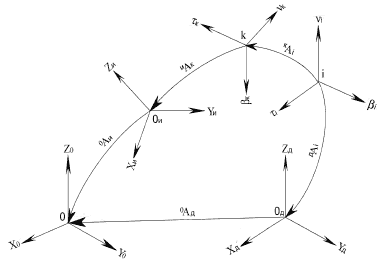
Рис. 11.2.
Предложенный метод описания геометрии обрабатываемой детали с применением сопровождающего трехгранника является обобщенным методом задания сложной поверхности. При анализе кинематики механизмов относительного манипулирования вводятся следующие координатные системы (рис. 11.2):
- (XYZ)0 — неподвижная система координат;
- (XYZ)д — система координат, связанная с местом крепления детали либо с ее базовыми поверхностями, относительно которых описывается обрабатываемая поверхность;
- (XYZ)и — система координат, связанная с местом крепления инструмента, относительно которого описывается его режущая поверхность и положение режущей кромки;
- (τνβ)k — подвижный трехгранник, связанный с режущей кромкой и определяющий ее положение относительно (XYZ)и
- (τνβ)i — подвижный трехгранник, связанный с точками поверхности и определяющий их положение в системе координат (XYZ)д.
Введенные системы координат дают возможность алгоритмизировать процесс обработки наиболее экономичным образом и с единых позиций разрабатывать алгоритмы управления манипулятором.
Как было отмечено выше, математически обрабатываемая поверхность получается взаимным перемещением двух трехгранников — (τνβ)i, связанного с поверхностью детали, и (τνβ)k, связанного с режущей кромкой инструмента (рис. 11.2). Элементы матрицы kAi определяют перемещение режущей кромки относительно программного задания поверхности, иAk — положение режущей кромки в системе координат (XYZ) и дAi — положение программируемых опорных точек поверхности в системе координат детали, 0Aд и 1Aи — положение систем координат (XYZ)д и (XYZ)и относительно (XYZ)0.
Рассмотрим способы формирования матрицы описания обрабатываемой поверхности kAi при перемещении между опорными точками для различных типовых поверхностей. Для получения требуемой поверхности рассматривается случай перемещения детали относительно режущей поверхности. (Получение обрабатываемой поверхности возможно и при обратном движении инструмента относительно детали.)
Аппроксимация сложных пространственных поверхностей, задаваемых координатами опорных точек.
Для аппроксимации сложных пространственных поверхностей, задаваемых координатами опорных точек поверхности, целесообразно применять многомерные полиномы. В отличие от описания поверхности сплайн–функциями данный метод позволяет исключить колебательный процесс, который возникает в результате совпадения точек поверхности в опорных точках и отсутствия гладкости полученного описания в промежутках между опорными точками поверхности. В данном случае аппроксимация поверхности между двумя точками основывается на знании координат опорной точки и частных производных в данной точке. Это не накладывает требований на гладкость поверхности между опорными точками.
При описании гладких поверхностей полиномами необходимо знать координаты предыдущих и последующих опорных точек поверхности. В этом случае обеспечивается сглаживание поверхности между опорными точками. Рассмотрим применение для этих целей многомерных полиномов Лагранжа, зависимых от двух переменных. Метод сопровождающего трехгранника, рассмотренный выше для описания поверхностей, в сочетании с полиномами Лагранжа дает возможность планировать траекторию перемещения инструмента относительно детали и формировать управление манипуляторами для поверхностей, задаваемых координатами опорных точек.
Описание поверхности полиномами состоит в последовательном решении следующих задач:
- Приближенное описание поверхности полиномами по заданным координатам опорных точек поверхности в системе координат (XYZ)д.
- Определение ориентации сопровождающего трехгранника (τνβ)i относительно осей системы координат (XYZ)д.
- Нахождение элементов матрицы, определяющей закон перемещения инструмента относительно детали.
Задача 1
Задача 1 состоит в получении коэффициентов полиномов Лагранжа по заданным координатам опорных точек поверхности. Интерполяционные полиномы Лагранжа одной переменной позволяют аппроксимировать функцию y=f(x) в системе координат детали (XYZ)д, задаваемую координатами опорных точек (xi,yi)

где коэффициенты полиномов Лагранжа p(xi) определяются через значения xi, yi в опорных точках
где i=0÷n, j=0÷n, n — степень полинома.
Полином Лагранжа двух переменных для поверхности, представленной на рис. 11.3, по аналогии с полиномом одной переменной имеет вид

где i=[0÷n] — количество опорных сечений поверхности вдоль оси Xд; j=[0÷n] — количество опорных сечений поверхности вдоль оси Zд; pij — коэффициенты полинома, определяемые через координаты опорных точек поверхности.
Рассмотрим аппроксимацию поверхности полиномами Лагранжа второй степени.

При интерполяции поверхности полиномами двух переменных необходимо, чтобы опорные точки поверхности (узлы интерполяции) образовывали сетку. Наиболее удобной является прямоугольная сетка с равномерным распределением клеток. В этом случае поверхность, представляемая координатами узлов прямоугольной сетки (рис. 11.3, а), в зависимости от расположения текущих координат (z,x) поверхности последовательно "накрывается" прямоугольником (рис. 11.3, б). При этом для более точной аппроксимации необходимо, чтобы текущие координаты поверхности (z,x) находились в области центра прямоугольника, ограниченного координатами
Последовательность выбора опорных точек, описывающих заданную ограниченную область поверхности, где проходит планируемая траектория, состоит в том, что все последующие опорные точки поверхности выбираются только после выхода i–й точки планируемой траектории из центра прямоугольника (рис. 11.3, б).
Постоянные коэффициенты полинома pij (11.8) определяются для каждого элемента поверхности через координаты известных опорных точек поверхности

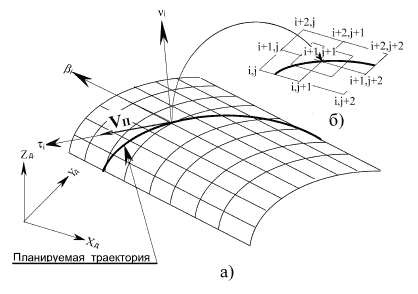
Рис. 11.3.
С учетом принятых обозначений полином (11.8) приводится к виду
y=a1z2x2+a2z2x+a3zx2+a4z2+a5x2+a6zx+a7z+a8x+a9, (11.9)
где коэффициенты ak вычисляются через постоянные pij и координаты опорных точек поверхности.
Задача 2
Задача 2 состоит в определении углов ориентации трехгранника (τνβ)i относительно осей системы координат (XYZ)д. Для каждой i–й точки поверхности, используя уравнение (11.9), кроме текущих координат поверхности, вычисляются направляющие косинусы для осей трехгранника (τνβ)i, связанного с поверхностью, которые представляют соответственно касательную, нормаль и бинормаль в каждой точке поверхности.
Для нахождения углов ориентации сопровождающего трехгранника (τνβ)i в каждой точке траектории относительно осей системы координат (XYZ)д необходимо получить уравнение нормали в точке поверхности, касательной к траектории перемещения инструмента относительно детали, и уравнение бинормали.
Направляющие косинусы нормали (ось νi) к поверхности в каждой точке траектории xiyizi определяются из уравнения (11.9)
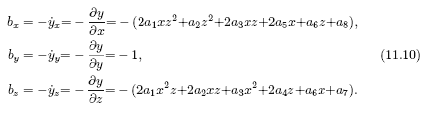
С учетом (11.10) направляющие косинусы для оси νi в точке поверхности относительно осей системы координат (XYZ)д принимают вид
Направляющие косинусы для касательной (ось τi) к траектории движения инструмента относительно детали определяется через частные производные от x, y, z по времени в i–й точке

С учетом (11.12) получим
Направляющие косинусы для бинормали трехгранника (τνβ)i — (ось βi) определяются из векторного произведения
Таким образом, уравнения (11.11), (11.13) и (11.14) определяют ориентацию подвижного трехгранника (τνβ)i относительно осей системы координат (XYZ)д.
Задача 3
Задача 3 состоит в нахождении элементов матрицы дAi(рис. 9.5), определяющей закон перемещения инструмента относительно детали. Элементы матрицы дAi
находятся на основе решения задач 1 и 2. Координаты xi, yi, zi представляют переменные x, y и z в полиноме Лагранжа (11.7), вычисляемые для каждой i–й точки траектории перемещения инструмента по поверхности детали. Направляющие косинусы Cxτ, Cxν, Cxβ, Cyτ, Cyν, Cyβ, Czτ, Czν, Czβ определяются из уравнений (11.11), (11.13) и (11.14).
Для получения непрерывного перемещения по планируемой траектории с заданной скоростью Vп (рис. 11.3) ее координаты x и z задаются в параметрическом виде
x(t)=Vxt, z(t)=Vzt,
где скорости Vx и Vz для текущего шага вычисляются через значение Vп на предыдущем шаге
Vx=Cx Vп, VZ=CzVп.
Значения Cx и Cz определяются также на предыдущем шаге.
Подстановкой текущих координат x(t), z(t) в (11.9) вычисляется координата y(t) планируемой точки траектории, а также планируемые значения направляющих косинусов Cxτ, Cxν, Cxβ, Cyτ, Cyν, Cyβ, Czτ, Czν, Czβ. Текущие элементы дAi вычисляются для каждой точки траектории с частотой задания координат x(t) и z(t).
Таким образом, метод, основанный на применении сопровождающего трехгранника, в сочетании с описанием обрабатываемой поверхности детали полиномами Лагранжа позволяет планировать закон перемещения инструмента и его ориентацию относительно детали для получения поверхностей, задаваемых координатами опорных точек.