
И в авторской редакции. Удк 536. 7 +"7"+ (201) +53+57 +577. 4+211 Вейник А. И., «Термодинамика реальных процессов», Мн.: "Навука I тэхнiка", 1991. 576 с. Isbn 5-343-00837. Вмонографии приводятся ряд новых закон
| Вид материала | Закон |
- Впервые в авторской редакции, 9591.86kb.
- Конспект лекций Кемерово 2004 удк: 637. 992, 2553.59kb.
- Хавронюк Микола Іванович удк 343 (4: 447) Кримінальне закон, 3077.54kb.
- М. М. Ничипорчук национальный исследовательский ядерный университет «мифи» моделирование, 9.59kb.
- Удк [544. 77: 577. 112. 824]: 535, 64.03kb.
- Хавронюк Микола Іванович удк 343 (4: 447) кримінальне закон, 684.97kb.
- Учебное пособие и Учебный словарь-минимум по религиоведению. М.: Гардарики, 2000. 536, 8576.03kb.
- Учебное пособие и Учебный словарь-минимум по религиоведению. М.: Гардарики, 2000. 536, 8588.39kb.
- И. А. Бунин принадлежал к тем реалистам рубежа веков, которым была дорога сущность, 164.9kb.
- Формирование гендерного подхода к обучению и воспитанию учащихся в школе 343, 102kb.
«движение за счет внутренних сил».
1. Техническое оснащение эксперимента.
Рассмотрим теперь кратко результаты многочисленных и всесторонних экспериментов с механическими устройствами типа БМ, принципиальные схемы которых описаны в предыдущей главе. В этих устройствах вопреки третьему закону Ньютона и закону сохранения количества движения появляется нескомпенсированная внутренняя сила, она обусловлена неодинаковыми значениями хронала и хода времени на взаимодействующих телах. Возникающая разность хроналов создает хрональное поле, которое наблюдается в окружающей среде. В свою очередь, внешнее (постороннее) хрональное поле тоже воздействует на ход времени на взаимодействующих телах и таким образом отражается на величине нескомпенсированной силы. Поэтому опыты с БМ не только решают проблему «движения за счет внутренних сил», но и одновременно под новым углом зрения освещают главную проблему, связанную с новым определением времени (пространства), и подтверждают правильность сделанных на этой основе хрональных выводов-прогнозов.
В опытах с целью приведения во вращение водила 3 (см. рис. 17, в), кривошипно-шатунного механизма (см. рис. 18, а) и некоторых маховиков-гироскопов используются авиационные электродвигатели постоянного тока марки Д-12ТФ - 2-я серия (масса 0,46 кг, номинальная частота вращения 13000 об/мин, напряжение 27 В, сила тока 2,6 А) и фотоаппаратурные электродвигатели марки МА-40А (масса 1,25 кг, номинальная частота вращения 10000 об/мин, напряжение 27 В, ток 4 А). Оба типа двигателей выдерживают кратковременную (в течение нескольких секунд), достаточную для замера, двукратную и более перегрузку по напряжению и току, что обеспечивает реальную частоту вращения свыше 20000 об/мин. Частота вращения измеряется тахометром ИО-30. Ток от сети выпрямляется, плавно регулируется и измеряется вольтметрами и амперметрами.
В качестве гироскопов применены трехфазные (36 В, 400 Гц) гиромоторы для авиационных гирокомпасов. Первый из них (малый, без заводского кожуха) имеет массу 0,42 кг и номинальную частоту вращения около 14000 об/мин, второй (большой, в кожухе) имеет массу 1,92 кг и частоту около 21000 об/мин. Трехфазный ток получается с помощью преобразователя ПАГ-1Ф, питаемого постоянным током напряжением 27 В. Путем перегрузки преобразователя удается существенно повысить частоту трехфазного тока, а следовательно, и число оборотов гиромоторов.
Нескомпенсированная внутренняя сила определяется с помощью весов технических первого класса с ценой деления 10-5 Η, а также аналитических с оптическим отсчетом и ценой деления 10-6 Н. Устройством БМ кладется на чашу весов либо располагается под весами и особым образом подвешивается к чаше проволокой, пропущенной через отверстие, которое предназначено для стержня арретира. Вся система заземляется.
Иногда, если определяется слишком малая сила или устройство имеет очень большую массу (порядка одного-двух десятков килограммов), то используются крутильные весы, изображенные на рис. 10, б. В последнем случае применяется подвес 1 достаточного диаметра [ТРП, стр.428-429].
2. Методика взвешивания.
Особое внимание приходится уделять методике определения нескомпенсированной силы, ибо надо учитывать вибрации БМ; реакцию крутящего момента двигателей и гироскопов; разогрев токоподводов, электродвигателей и гиромоторов, что сопровождается возникновением подъемной силы, вызванной тепловой конвекцией воздуха; обычную конвекцию воздуха в комнате; заряжание хрональным полем БМ окружающих предметов и силовое взаимодействие с ними; влияние хронального поля экспериментатора на БМ (силовое и через ход времени на взаимодействующих в БМ телах) и т.д. Со всеми этими помехами я боролся в течение многих лет, перепробовав сотни всевозможных вариантов устройств.
Вибрации устраняются применением упругого звена - резинки или пружинки - между БМ и проволокой, идущей к чаше весов. С реакцией крутящего момента можно бороться, например, используя два двигателя, вращающихся в противоположных направлениях. Токоподводы должны быть изготовлены из мягкого изолированного медного провода и подвешены горизонтально, их и электродвигатели целесообразно теплоизолировать; после каждого измерения все устройство должно остыть. Весы располагаются, например, на доске.
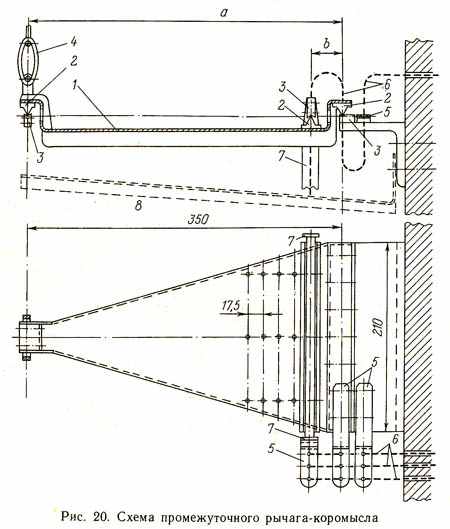
В ней предусмотрено отверстие для проволоки, идущей к чаше весов. Весь объем под доской, где висит БМ, окружен загородкой из плотного материала, защищающего от сквозняков: это может быть картон, плотная бумага, клеенка и т.п. Однако коренного снижения помех удалось добиться только после применения специального промежуточного рычага-коромысла 1, соединенного с чашей весов через резинку 4 (рис. 20). Длинные опорные ножи 2 хорошо гасят реакцию крутящего момента даже при наличии одного мотора. Изменением расстояния b - отношения b/a - до среднего ножа регулируется чувствительность весов для тяжелых БМ; с этой целью на коромысле предусмотрена серия запасных отверстий. Ножи 2 и седла для них 3 изготовлены из твердой закаленной стали, например ХВГ. Токоподводящие провода 6 поддерживаются пластинками 5. Сами пластинки и отверстия в них под провода расположены точно против остриев ножей, поэтому при качании коромысла упругость и сила тяжести проводов практически не влияют на величину измеряемой силы. Провода образуют петли (они изображены жирными штриховыми линиями). Коромысло 1 и пластинки 5 и 7 сделаны из листовой стали толщиной 1 мм, коромысло упрочнено отогнутыми ребрами жесткости, как показано на рисунке.
Очень важно, чтобы все три острия ножей располагались в одной плоскости, тогда при качании коромысла не будет нарушаться соотношение плеч а и b рычага. Это достигается постановкой соответствующих прокладок под ножи. Острия ножей можно видеть через небольшие окна, вырезанные на вертикальных участках коромысла.
Промежуточный рычаг-коромысло особенно нужен при испытании таких БМ, где невозможно применить два гироскопа, вращающихся в разные стороны. Например, это относится к БМ-35, для которого к тому же потребны весьма высокие частоты вращения, что создает большой реактивный крутящий момент.
БМ крепится жестко к двум вертикальным пластинкам 7, привинченным к седлу 3. Для учета влияния тепловой конвекции воздуха и внешних хрональных воздействий нескомпенсированную силу целесообразно направлять при одном измерении вверх, а при другом - вниз, чтобы получить среднее ее значение. Если этого нельзя сделать путем изменения направления вращения двигателя, тогда приходится поворачивать все устройство БМ вокруг горизонтальной оси. Осями поворота могут служить два полых болта, расположенных внизу пластин 7, на них висит БМ, через отверстие в болтах пропускаются токоподводящие провода.
С целью снижения влияния тепловой конвекции коромысло целесообразно защитить двух-, трехслойным алюминиевым экраном 8 (изображен штриховыми линиями). Его бока должны быть отбортованы книзу, чтобы отвести струю теплого воздуха за пределы коромысла [ТРП, стр.429-431].
3. Устройства типа БМ-28.
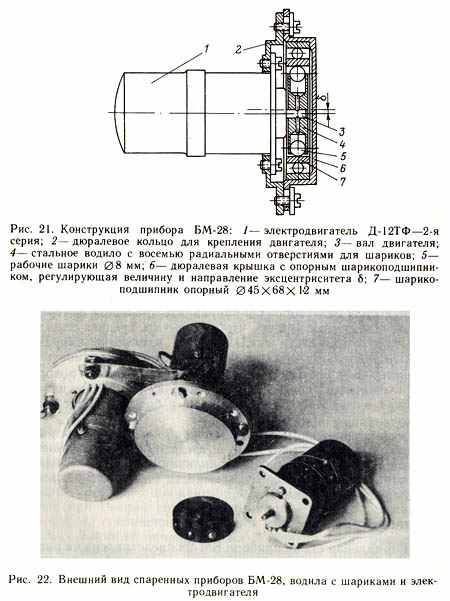
Принципиальная схема прибора БМ-28 представлена на рис. 17. Этот прибор осуществлен с двигателями МА-40А и Д-12ТФ - 2-я серия. В первом случае двигатель пришлось полностью загерметизировать дюралевым кожухом. Во втором случае конструкцию удалось существенно упростить и облегчить (рис. 21). Здесь загерметизированы посредством кольца 2 и крышки 6 только стальное водило 4 с восемью рабочими шариками 5 диаметром 8 мм, которые катятся по кольцу 7 легкого шарикоподшипника с внутренним диаметром 45 мм.
Описанного типа приборы были испытаны в одиночку и в паре (рис. 22) на рычажных и крутильных весах при различной ориентации в пространстве эксцентриситета кольца. Парное устройство со взаимно противоположным направлением вращения двигателей применено с целью погашения реакции крутящего момента. Установлено, что во всех случаях нескомпенсированная хрональная сила РхВ направлена в сторону, где скорость шариков минимальна, причем величина силы от направления вращения моторов не зависит. Если эксцентриситет = 0, то сила РхВ обращается в нуль. При эксцентриситете = 0,7 мм и частоте вращения 21000 об/мин, что соответствует скорости движения шариков 42 м/с, сила РхВ равна около 14·10-5 Η [ТРП, стр.431-433].
4. Устройства типа БМ-29 и БМ-30.
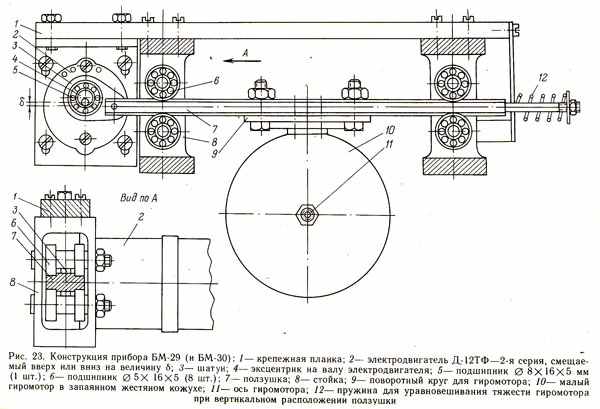
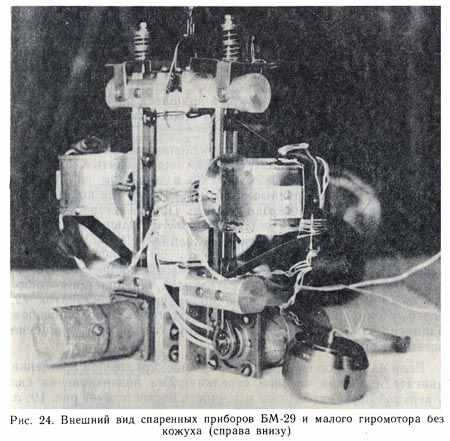
Принципиальная схема этих приборов приведена на рис. 18. Они осуществлены с малыми и большими гиромоторами, кривошипно-шатунный механизм приводится во вращение электродвигателями Д-12ТФ - 2-я серия. В одном варианте прибора гиромоторы колеблются по принципу скольжения между двумя параллельными направляющими, в другом ползушка с гиромотором катится между шариковыми подшипниками. Конструкция второго варианта изображена на рис. 23. Здесь поворотный круг 9, к которому крепится гиромотор 10, позволяет осуществлять колебания как поперек (БМ-29), так и вдоль оси гиромотора (БМ-30). Внешний вид спаренного прибора с малыми гиромоторами приведен на рис. 24.
При испытании приборов с гироскопами, колеблемыми поперк оси вращения (БМ-29, рис. 23), найдено, что нескомпенсированная сила ориентирована перпендикулярно к линии колебаний и направлена в сторону зоны гироскопа с наименьшей скоростью движения (см. рис. 18, в).
Направление силы изменяется на обратное при изменении направления вращения либо гироскопа, либо кривошипа. Например, малый гироскоп массой 0,42 кг при = 0,7 мм, R = 0,7 мм, l = 14 мм и частотах вращения кривошипа 2800 об/мин и гироскопа 21000 об/мин, что соответствует движению обода диаметром 55 мм со скоростью 63 м/с, дает нескомпенсированную силу РхВ , равную около 3·10-5 Η.
Испытания приборов типа БМ-30 с гироскопами, колеблемыми вдоль оси вращения (рис. 24), проходили аналогичным образом. Возникающая в опытах нескомпенсированная сила действует вдоль оси гироскопа и от направления его вращения не зависит, она во всех случаях ориентирована в сторону низкой скорости колебательного перемещения ползушки (см. рис. 18, г). Например, малый гироскоп при упомянутых выше (БМ-29) условиях развивает нескомпенсированную силу около 14·10-5 Н. Эта сила заметно превышает ту, которую дает гироскоп, колеблемый поперек оси вращения. Следует добавить, что приборы БМ-29 и БМ-30 испытывались на обычных и крутильных весах, поэтому колебания гироскопов по необходимости были ориентированы как в горизонтальном, так и в вертикальном направлении [ТРП, стр.433-435].
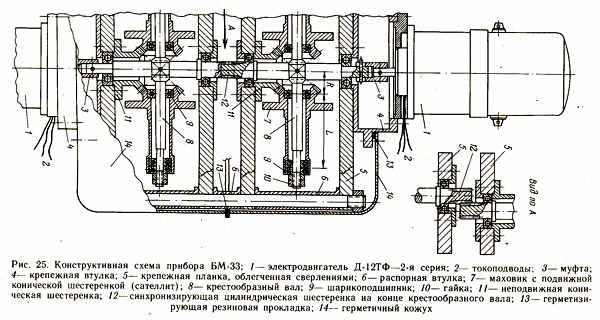
5. Устройства типа БМ-33 и БМ-34.
Должен сказать, что различных приборов, действующих по схеме рис. 19, а, испытано большое множество. Например, один из них (БМ-17),состоит из двух маховиков, насаженных на валы электродвигателей, которые прикреплены к вращающейся вокруг вертикальной оси штанге. Есть приборы (БМ-33), содержащие два больших или два малых гиромотора, укрепленных на вращающемся диске. Но во всех этих приборах реакция крутящего момента штанги и диска не гасится, что затрудняет их испытание. Применение четырех малых гиромоторов и двух дисков, вращающихся в противоположных направлениях, частично гасит этот момент. Однако добиться таким способом высоких скоростей не удается, ибо подобную систему трудно сбалансировать по массе и в ней практически невозможно обеспечить одинаковые частоты вращения гиромоторов, а также дисков. В итоге пришлось прибегнуть к принудительной синхронизации частот вращения гироскопов с помощью шестеренок.
На рис. 25 изображена конструктивная схема одного такого прибора, а на рис. 26 - его внешний вид со снятым кожухом. Детали этого прибора изготовлены в основном из дюраля, маховики и крестообразные валы - из стали; все подшипники шариковые, радиальные однорядные. При диаметре маховика 35 мм масса сателлита с шестеренкой и подшипником 50 г, масса прибора БМ-33 в сборе 1,93 кг, радиус R = 11 мм, плечо момента сил L = 36 мм (см. рис. 19, а и 25). Коническая шестеренка сателлита 7 катится по неподвижной конической шестеренке 11. Вал верхней пары сателлитов зацепляется с таким же нижним валом с помощью цилиндрических зубчаток 12, поэтому они вращаются в разные стороны. Таким способом балансируются массы и синхронизируются частоты вращения всех сателлитов и валов.
Если на прибор смотреть сверху (рис. 25), то при вращении двигателя против часовой стрелки схема возникновения сил у верхней пары сателлитов в точности соответствует рис. 19, а. При изменении направления вращения верхнего вала изменится также направление вращения сателлитов, в результате нескомпенсированная сила останется неизменной (см. параграф 5 гл. XXI). То же самое можно сказать и о нижнем вале с его сателлитами. Поэтому с целью изменения направления силы такой прибор надо поворачивать «вниз головой».
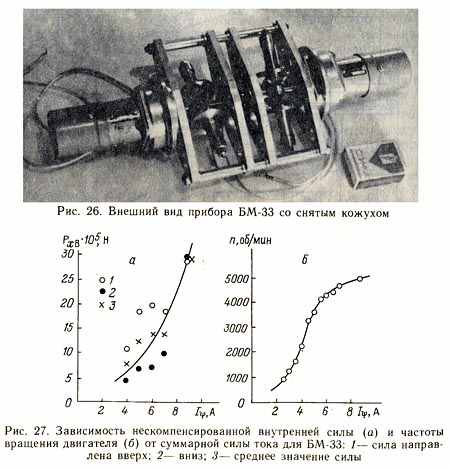
Результаты испытания описанного устройства на аналитических весах без промежуточного коромысла представлены на рис. 27. Из сопоставления графиков а и б видно, что внутренняя сила резко возрастает с частотой вращения. Этого и следовало ожидать, ибо момент гироскопических сил пропорционален произведению угловых скоростей вертикального вала и сателлита. При суммарной силе тока на двух моторах Ιψ = 8,7 А частота вращения n = 5000 об/мин и внутренняя сила ΡхВ = 28·10-5 Η.
Момент гироскопических сил пропорционален также моменту инерции, в свою очередь пропорциональному диаметру маховика в четвертой степени (см. параграф 5 гл. XX). Чтобы экспериментально показать влияние момента инерции, по схеме рис. 25 изготовлен большой прибор БМ-33 массой 9,27 кг. При диаметре маховика 70 мм, R = 25 мм и L = 70 мм масса сателлита равна 244 г. Однако электродвигатели МА-40А не позволили развить необходимые для сравнения частоты вращения.
Аналогичное устройство БМ-33-мини с диаметром маховика 21 мм и массой сателлита 26,7 г имеет массу в сборе 1,58 кг, R = 8 мм, L = 42 мм. Испытание этого прибора при частоте вращения 5000 об/мин (сила тока 4 А) дало внутреннюю силу около 2·10-5 Η. Эта величина примерно в 14 раз ниже предыдущей, что вполне объяснимо, ибо у мини-сателлита все размеры меньше, чем у предыдущего: диаметр маховика в 1,67 раза (1,674 = 7,7), длина маховика в 1,17 раза (7,7х1,17 = 9), диаметр конической шестеренки в 1,09 раза, диаметр хвостовика в 1,25 раза и т.д. В итоге набирается величина, сопоставимая с экспериментальной.
Таким образом, многочисленные опыты, выполненные с различными устройствами типа БМ-33, подтверждают принципиальные выводы теории. Прежде всего это касается направления действия возникающей внутренней силы и ее связи с направлениями вращений сателлита. Наблюдается также определенное согласование теории и опыта в количественном отношении. Например, квадратичный характер имеет зависимость величины силы от числа оборотов сателлита в единицу времени (в наших приборах частоты вращений сателлита вокруг продольной и поперечной осей равны между собой). Есть намек и на четвертую степень зависимости силы от диаметра маховика. Интересен факт изменения величины силы при ее направлении вверх или вниз (рис. 27, а), который отражает влияние тепловой конвекции и внешних хрональных воздействий.
Необходимо отметить, что найденные в БМ-33 значения внутренних сил фактически определяются разностью между гироскопическим и ротационным эффектами (смерчевый эффект гасится из-за разнонаправленного вращения вертикальных осей). Первый эффект господствует над вторым благодаря большому L и малому R. С уменьшением L и ростом R ротационный эффект увеличивается и БМ-33 превращается в БМ-34.
При осуществлении устройства БМ-34 за основу взята конструктивная схема БМ-33-мини (она похожа на схему рис. 25). В этом приборе у сателлита отсутствует хвостовик. Маховик, изготовленный заодно с конической шестеренкой, вращается на трех миниатюрных шариковых подшипниках, расстояние между центрами шариков крайних подшипников L = 5 мм, расстояние от вертикальной оси до центра шарика первого подшипника R = 8 мм, диаметр маховика 21 мм, масса сателлита 16,5 г, масса всего прибора 1,1 кг.
Испытания показывают, что при частоте вращения 10000 об/мин ротационный и гироскопический эффекты, направленные в противоположные стороны, мало различаются по абсолют ной величине, в результате суммарная нескомпенсированная сила не выходит за пределы 0,5·10-5 Η, то есть за пределы погрешности измерений. Очевидно, что это предельный случай, полученный при уменьшении L. Чтобы преобладал ротационный эффект, надо увеличить R. О реальном существовании и неравенстве нулю ротационного и гироскопического эффектов в БМ-34 говорят опыты с БМ-29 (см. рис. 18, в) и БМ-33 [ТРП, стр.435-440].
6. Устройства типа БМ-35.
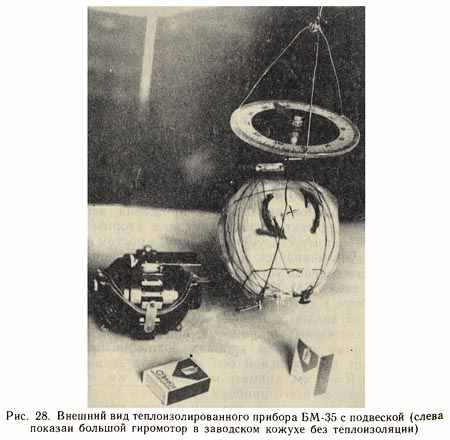
В качестве приборов БМ-35 я использовал упомянутые выше большой и малый авиационные гиромоторы. Здесь я остановлюсь только на опытах с большим.
Прибор подвешивается к чаше весов с помощью простейшего устройства, позволяющего ориентировать ось вращения в лю бом направлении по странам света и под любым углом к горизонту (рис. 28). Гироскоп разгоняется до нужной частоты вращения в течение 3-5 мин. Затем источник тока отключается (на рис. 28 снизу видны штырьки трехфазного разъема, направление вращения мотора регулируется поворотом розетки разъема на 180°), маховик после продолжает вращаться по инерции еще 40-50 мин. Весы снимаются с арретира и по световой шкале отсчитывается величина вертикальной составляющей внутренней нескомпенсированной силы. До момента измерения гиромотор успевает нагреться. Это сопровождается появлением заметной подъемной силы. Для ее ослабления прибор теплоизолирован слоем шнурового асбеста диаметром 4 мм, затем полиэтиленом, 21 слоем тонкой мятой бумаги и еще слоем полиэтилена.
Однако измерения на режиме замедленного вращения гироскопа сильно занижают искомый эффект и затушевывают многие важные особенности изучаемого процесса. Кроме того, реактивный момент торможения создает помехи при измерениях, стремясь повернуть чашу весов. С целью устранения всех этих неприятностей был применен промежуточный рычаг-коромысло (см. рис. 20), который, в частности, дает возможность не отключать ток перед измерениями, что резко повышает частоту вращения в момент измерений, а также позволяет изучать влияние ускорений.
Многочисленные эксперименты показывают, что весы фиксируют наибольшую величину нескомпенсированной силы при ориентации оси вращения, близкой к вертикали. При этом величина эффекта зависит от ускорений не меньше, чем от абсолютных скоростей маховика.
Любое вращающееся тело является мощным генератором хронального поля, которое вращается в ту же сторону, что и тело; именно поэтому обсуждаемый эффект назван мною смерчевым. Факт вращения поля хорошо фиксируется рамкой. При этом нет надобности ее перемещать, ибо само поле создает условия, необходимые для опрокидывания рамки. Хрональное поле гироскопа заряжает окружающие предметы, и они оказывают силовое воздействие на прибор. То же самое делает и хрональное поле экспериментатора.
Если смотреть на прибор сверху, то вращение гироскопа по часовой стрелке создает нескомпенсированную внутреннюю силу, направленную вверх. Изменение направления вращения гироскопа (изменять направление вращения Земли я не пробовал) приводит к изменению направлений действия силы и вращения поля, знак вращающегося хронального поля в обоих случаях положительный, но неподвижный БМ и его окружение заряжены плюсом и минусом одновременно.
Н
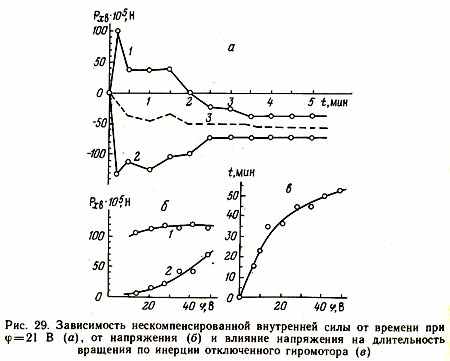
а рис. 29, а изображена типичная зависимость вертикальной составляющей внутренней силы от времени при резком подключении гиромотора к преобразователю ПАГ-1Ф. Вначале скорость маховика близка к нулю, а ускорение максимально, поэтому сила целиком определяется ускорением. О роли ускорения можно судить по второму равенству (237) и формуле (328). При этом знаки ускорения и приращений хронала и хода времени роли не играют, ибо в уравнение Ньютона (312) ход реального времени входит в квадрате. В первый момент шкала весов делает рывок, но к 10-20 с успокаивается и показывает силу, вызванную ускорением. Ускорение постепенно уменьшается, а скорость нарастает. О роли скорости говорят формулы (237), (328) и (329).
В наших условиях роль ускорения в несколько раз выше, чем роль скорости. В течение 1-2 мин суммарная внутренняя сила (от ускорения и скорости) может даже несколько возрасти, но затем снова падает. Наконец, к 3-4 мин прибор выходит на стационарный режим, когда ускорение обращается в нуль и нескомпенсированная сила целиком определяется величиной скорости. Все это можно наблюдать на рис. 29, а, где кривая 1 соответствует облегчению прибора (внутренняя сила направлена вверх), а кривая 2 - его утяжелению (сила направлена вниз, прибор подвешен «вниз головой»).
Обращает на себя внимание смещение кривых 1 и 2 книзу. Это объясняется тем, что внешнее хрональное поле, создаваемое вращающимся гироскопом, заряжает окружающие предметы. Заряженные боковые стенки коробки, в которой висит прибор, на показания весов влияют мало. Остаются верх и низ: экран 8 (см. рис. 20) и в определенной мере верхняя доска, а также пол. В данном опыте расстояние от прибора до экрана равно 50 мм, а до пола - 270 мм. Поэтому отталкивающая хрональная сила со стороны экрана заметно выше, чем со стороны пола, причем она преодолевает также силу тепловой конвекции, что и приводит к смещению кривых вниз. Если бы не было хрональных и конвективных помех, то средняя штриховая линия 3 должна была бы совместиться с осью абсцисс. Ослабить хрональные помехи удается соответствующим размещением прибора по высоте, а конвективные - двух-, трехслойным алюминиевым экраном 8 с отогнутыми краями, отводящими теплый воздух от коромысла.
Хрональное поле экспериментатора тоже влияет на внутреннюю силу, но не так заметно, как поле гироскопа. При установке весов на нуль и при измерениях надо не бегать по комнате, а сидеть смирно и не изменять позу. Это влияние есть лучшее экспериментальное доказательство того факта, что главной составной частью биополя служит именно хрональное поле, изменяющее ход времени.
Зависимость величины внутренней силы от частоты вращения гиромотора показана на рис. 29, б, где кривая 1 соответствует начальным моментам (действует в основном ускорение), а кривая 2 - стационарному режиму (действует только скорость), причем о частоте приходится судить по напряжению φ постоянного тока, подаваемому на клеммы преобразователя. Слабое изменение силы от ускорения объясняется резким падением оборотов преобразователя в начальный период, при включении гиромотора, что ограничивает величину достижимых ускорений. О связи напряжения с частотой вращения тоже можно судить лишь по косвенным признакам, например по длительности t вращения гиромотора после его выключения (он перестает выть) (рис. 29, в). Непосредственному измерению частоты препятствует заводской герметичный кожух. Кстати, длительные опыты с воющим гиромотором пагубно отражаются на слухе экспериментатора.
После выключения прибора появляется слабое отрицательное ускорение (торможение от трения), оно вызывает небольшой скачок силы, который направлен в сторону, противоположную основному эффекту. Но так бывает только тогда, когда вначале отключается трехфазный ток.
Если выключить однофазный, то гиромотор превращается в генератор трехфазного тока, питающий преобразователь. Торможение скачкообразно возрастает, при этом отрицательное ускорение может даже превосходить по величине первоначальное положительное. Соответственно появляется и большая по величине обратная внутренняя сила. В таком состоянии гиромотор останавливается уже в 2 и более раз быстрее, чем без принудительной нагрузки со стороны преобразователя. Через 1-1,5 мин после выключения маховик обычно входит в резонанс с корпусом устройства, возникают сильные вибрации, сбрасывающие хрональный заряд с прибора, в результате сила возвращается примерно к исходному значению, определяемому скоростью гироскопа. Вспомним, что аналогично снимается заряд с воды путем легкого удара пузырька о стол (см. параграф 7 гл. XVIII).
Опыты показывают, что величина внутренней силы изменяется в течение суток, зависит от времени года, широты местности и т. д. Об этом говорил и Н.А. Козырев, экспериментировавший с вращающимися волчками. Теперь должно быть ясно, что причина заключается в изменении величины и направления переносной скорости ωп точки Земли, где находится вращающийся маховик (см. рис. 19, б).
Интересно, что свои опыты Н.А. Козырев проводил с волчками и гироскопами, но физическая суть обнаруженного явления была ему не известна, поэтому успех опытов целиком определялся случайными причинами: «Условия, при которых появлялись эти эффекты, не удавалось воспроизводить по желанию. Необходимый для этого режим устанавливался случайными обстоятельствами» [50, с.74]. И далее: «При взвешивании гироскопов, несмотря на большое число опытов, не удалось даже точно установить условия, при которых обязательно должен получиться эффект» [50, с.80]. Эффект по неизвестным причинам мог неожиданно изменить не только свою величину, но и знак. «Бывали дни, когда некоторые опыты просто не удавались. Но через некоторое время в тех же условиях снова получались прежние эффекты» [51, с.191].
В первых своих опытах Н.А. Козырев использовал плохо сбалансированные школьные волчки. Это случайно привело к несимметричным вибрациям, как в БМ-30, и дало уменьшение веса волчка. Более точно выполненные авиационные гироскопы эффекта не обнаруживали, пришлось их специально вибрировать с помощью мотора с эксцентриком либо электромагнитного реле - очень существенная догадка Н.А. Козырева. Но при этом только случайно могли возникнуть условия, когда вибрация оказывалась несимметричной и нужного направления, что обеспечивало требуемый круговой процесс и создавало нескомпенсированную силу соответствующего направления. Естественно, что в такой ситуации без знания истинного физического механизма явления успешно управлять опытом было в принципе невозможно. Что касается возможности получения на волчках эффекта типа БМ-35, то для этого потребны слишком высокие частоты вращения, которых у Н.А. Козырева не было.
На этом я закончу описание моих экспериментов с устройствами типа БМ. Эти приборы существенно различаются принципами своего действия, но одновременно во всех деталях в точности воспроизводят нарисованную выше теоретическую картину (я не буду ее здесь повторять). Это подтверждает правильность основных положений ОТ: о необходимости включения времени и пространства в общий круговорот простых явлений природы, о возможности произвольного управления ходом реального физического времени, о нарушении законов механики в определенных условиях и т.д. Никакая другая теория не способна предсказать и объяснить полученные экспериментальные результаты, следовательно, имеются все основания отнести описанные опыты к категории решающих, призванных определять судьбы теорий [ТРП, стр.440-445].
7. Перспективы применения «движения за счет внутренних сил».
Мне известно, что многие энтузиасты, пытаясь создать безопорный движитель, способный летать, вращают всевозможные тела, изощряются в придании своим хитроумным устройствам самых замысловатых движений и т.д. с целью обойти законы механики Ньютона. Этим занимаются даже целые институты. Однако я вынужден сразу же огорчить всех этих энтузиастов: обмануть механику Ньютона в принципе невозможно. Есть только один путь достигнуть желаемого - это воздействовать на ход времени, другого пути Бог не предусмотрел. Но и на этом пути вращение монолитных тел проблему не решит, ибо требуются такие высокие скорости, с которыми не справятся никакие материалы и подшипники.
На основе теоретических соображений я знал, что закон сохранения количества движения можно нарушить, и вначале пытался использовать для этого различные механические, электрические, магнитные и другие системы [21, с.213 и 359]; одна из них (электрическая, БМ-15) изображена на рис. 28 работы [21]. Однако мне были неизвестны числовые значения коэффициентов состояния в уравнении (308), поэтому я не знал конкретных условий нарушения этого закона. Пришлось идти на ощупь, методом проб и ошибок.
Намек на то, какие скорости по душе механическим системам, я нашел в работах Гольдсмита и Эйчельбергера и Кайнике, изучавших явления удара. Например, при скорости стального шарика около 50 м/с, ударяющегося об алюминиевый стержень, изменение количества движения ударника и импульса мишени «различаются на ±2%, что находится в пределах экспериментальной ошибки» [33, с.177]. При скоростях порядка 2-5 км/с (например, при ударе стали о свинец) картина резко изменяется, ибо «экспериментальные результаты существенно расходятся с предсказаниями, вытекающими из закона сохранения импульса» [89, с.219]. Мне стало ясно, почему Реп, Мариотт, Ньютон и другие авторы, проводившие свои опыты при значительно меньших скоростях, не обнаружили нарушения закона сохранения импульса и почему не хотели работать мои первые механические БМ. Заметные нескомпенсированные внутренние силы появились лишь после того, как в моих БМ скорости стали приближаться к 50 м/с, начиная с БМ-28. Сравнительно большие силы возникают при частотах вращения порядка нескольких сот тысяч оборотов в минуту. Например, по сообщению агентства АПН от 8 июня 1987 г., в одном из московских НИИ маховики вращаются с потерей веса 14%. Однако объяснить этого никто не может, да и полететь на такой машине тоже невозможно. Нужны другие подходы.
Мое обращение к механическим системам, описанным в настоящей монографии, объясняется их предельной простотой и наглядностью. Мне было важно не полететь, а убедительно нарушить закон сохранения импульса. В этой проблеме количественная сторона принципиального значения не имеет. Простота устройств позволила мне все опыты провести дома, ибо на поддержку официальной науки я рассчитывать не мог. Благодаря той же простоте мои результаты легко может проверить и подтвердить каждый желающий. К сожалению, ограниченные возможности не позволили мне изготовить и испытать еще десяток БМ, различающихся своими главными параметрами, чтобы получить красивые завершающие графики. Однако бедность - не порок... [ТРП, стр.445-446].