
Вестник Брянского государственного технического университета. 2008. №3(19) Энергетическое машиностроение
| Вид материала | Документы |
СодержаниеR) воздушного зазора думмиса при различных значениях развиваемого усилия P Р и максимальной индукции сердечника В Р, значения максимальной индукции сердечника В |
- Вестник Брянского государственного технического университета. 2008. №2(18) Энергетическое, 198.73kb.
- Вестник Брянского государственного технического университета. 2007. №1(13) Энергетическое, 184.61kb.
- Вестник Брянского государственного технического университета. 2008. №1(17), 121.05kb.
- Вестник Брянского государственного технического университета. 2008. №3(19), 168.61kb.
- Вестник Брянского государственного технического университета. 2008. №3(19), 114.86kb.
- Вестник Брянского государственного технического университета. 2008. №3(19), 138.83kb.
- Вестник Брянского государственного технического университета. 2008. №2(18), 127.9kb.
- Вестник Брянского государственного технического университета. 2008. №1(17), 152.78kb.
- Вестник Брянского государственного технического университета. 2006. №3 (11) Транспортное, 87.35kb.
- Вестник Брянского государственного технического университета. 2008. №3(19) Образование, 201.01kb.
Вестник Брянского государственного технического университета. 2008. № 3(19)
Энергетическое машиностроение
УДК 621.438+621.165
И.Г. Гоголев, А.М. Дроконов, А.Д. Николаев
АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОСЕВОЙ
НАГРУЗКОЙ РОТОРА ТУРБОМАШИНЫ
Рассмотрены энергетические и конструктивные характеристики электромагнитных думмисных устройств. Представлена система автоматического регулирования уровня осевого усилия, действующего на упорный подшипник турбомашины.
Ключевые слова: осевое усилие, упорный подшипник, электромагнитный думмис, ротор турбомашины, система управления.
В современных турбомашинах большой мощности для восприятия осевого усилия, действующего на ротор, и стабилизации его положения относительно статора широко применяются упорные подшипники скольжения сегментного типа (рис. 1). Смазывающим агентом в них служит, как правило, масло.
О
 собенность эксплуатации упорных подшипников заключается в том, что при переменных режимах работы энергоблоков (сбросах и набросах нагрузки, помпаже компрессоров и нагнетателей, резких изменениях начальных параметров теплоносителей и противодав-ления, засолении проточной части, колебании мощности агрегатов) необходима высокая надежность, так как при этом возможно не только многократное увеличение, но и изменение направления действия осевого давления на ротор. Работоспособность упорных подшипников, в соответствии с ГОСТ 30546. 1-98 для стационарных установок, должна быть обеспечена и в условиях сейсмических воздействий.
собенность эксплуатации упорных подшипников заключается в том, что при переменных режимах работы энергоблоков (сбросах и набросах нагрузки, помпаже компрессоров и нагнетателей, резких изменениях начальных параметров теплоносителей и противодав-ления, засолении проточной части, колебании мощности агрегатов) необходима высокая надежность, так как при этом возможно не только многократное увеличение, но и изменение направления действия осевого давления на ротор. Работоспособность упорных подшипников, в соответствии с ГОСТ 30546. 1-98 для стационарных установок, должна быть обеспечена и в условиях сейсмических воздействий.П
Рис. 1. Сегментный упорный
подшипник
ревышение расчетных значений аэродинами-ческих аксиальных давлений на ротор приводит к преждевременному износу упорных колодок подшипников и вызывает серьезные аварии с последующими длительными остановками агрегатов. Поэтому, наряду с уточнением расчетных методов определения действующего на ротор осевого усилия, актуальной является разработка специальных систем автоматической стабилизации уровня этих сил, что позволит существенно повысить надежность турбинных установок в широком диапазоне режимов и условий эксплуатации.
В статье рассматривается предлагаемый вариант системы компенсации аксиального аэродинамического усилия на ротор турбомашины. Основным звеном ее является регулирующий электромагнитный думмис (ЭМД), питание которого осуществляется от источника тока, получающего электрический сигнал через следящий контур от датчиков давления, установленных в колодках упорного подшипника и регистрирующих изменение гидродинамических характеристик масляного клина [1,2].
Главные элементы ЭМД – электрический магнит кольцевого типа, размещаемый в статоре установки, и якорь (диск), расположенный на валу (рис.2). Как видно, наряду с автономным вариантом исполнения такого устройства, возможно в качестве ЭМД использование турбинной ступени, в которой полотно диафрагмы при установке в нем электромагнита будет служить ярмом, а диск рабочего колеса – якорем думмиса.
П
 ри проектировании и изготовлении необходимо обеспечить конструкционную надежность таких устройств. С этой целью индукция магнитного поля в зазоре ЭМД принимается равной
ри проектировании и изготовлении необходимо обеспечить конструкционную надежность таких устройств. С этой целью индукция магнитного поля в зазоре ЭМД принимается равной  , на ферромагнитных участках ее уровень, как правило, не должен превышать
, на ферромагнитных участках ее уровень, как правило, не должен превышать  , и только в локальных зонах возможна несколько большая интенсивность нагрузки. Плотность тока в катушке
, и только в локальных зонах возможна несколько большая интенсивность нагрузки. Плотность тока в катушке  для номинального режима устанавливается в диапазоне от 4 до 5 А/мм2.
для номинального режима устанавливается в диапазоне от 4 до 5 А/мм2.Базовыми параметрами думмиса являются осевой размер воздушного зазора
 и его кольцевая площадь, определяющие при заданной индукции величину развиваемого осевого усилия Р.
и его кольцевая площадь, определяющие при заданной индукции величину развиваемого осевого усилия Р.Сохранению уровня индукции в ярме способствует изменение его толщины по высоте сердечника
 , а сокращению потока рассеяния, не участвующего в создании аксиального давления, - шлиц, обеспечивающий частичное замыкание силовых линий в рабочей зоне магнитной системы (рис.2).
, а сокращению потока рассеяния, не участвующего в создании аксиального давления, - шлиц, обеспечивающий частичное замыкание силовых линий в рабочей зоне магнитной системы (рис.2).В
Рис. 2. Конструкция электромагнитного
думмиса
еличина потока рассеяния зависит от размеров шлица – ширины
 и глубины
и глубины  , причем увеличение и сокращение способствуют уменьшению этого параметра, а потому оптимизация их соотношения – одна из задач, рассматриваемых в процессе проектирования ЭМД.
, причем увеличение и сокращение способствуют уменьшению этого параметра, а потому оптимизация их соотношения – одна из задач, рассматриваемых в процессе проектирования ЭМД.Размер катушки думмиса определяется величиной магнитодвижущей силы, необходимой для создания заданного уровня индукции в зазоре. С целью уменьшения тепловых потерь и индуктивности при высоком коэффициенте заполнения катушку предполагается выполнять из проводников прямоугольного сечения, а потому выбрана соответствующая форма сечения ее окна. Размеры якоря ЭМД примерно равны размерам статорной части (сердечника).
С целью изучения энергетических показателей думмисных устройств были выполнены комплексные аналитические исследования ряда их типоразмеров на математической модели методом конечных элементов, в процессе которых определены основные конструктивные параметры и характеристики электромагнитных полей ЭМД для условий формирования ими осевых усилий в 10, 40, 70 и 100 кН при величине монтажного зазора между ярмом и якорем
 мм.
мм.Основные конструктивные соотношения исследованных вариантов думмисных устройств представлены в таблице.
Таблица
Конструктивные размеры электромагнитных думмисов, мм
| Номинальное усилие Р, кН | D1 | D2 | D3 | D4 | bш | hш | hм |  |  |
| 10 | 234 | 174 | 208 | 120 | 6 | 4 | 20 | 14 | 26 |
| 40 | 458 | 344 | 404 | 238 | 8 | 8 | 12 | 30 | 52 |
| 70 | 486 | 364 | 414 | 314 | 8 | 10 | 24 | 32 | 42 |
| 100 | 540 | 382 | 446 | 318 | 10 | 12 | 22 | 42 | 58 |
Результаты расчетов магнитных полей позволили определить параметры думмисов и оптимизировать их конструкцию с целью получения наиболее равномерных электромаг-нитных нагрузок.
В качестве примера на рис.3 проиллюстрирована картина магнитного поля в думмисе с номинальным усилием 10 кН при плотности тока в катушке 4,5 А. Как видно, наибольших значений индукция достигает в области точек 1, 2 и 3 сердечника, а в якоре ее интенсивность существенно снижается.
А
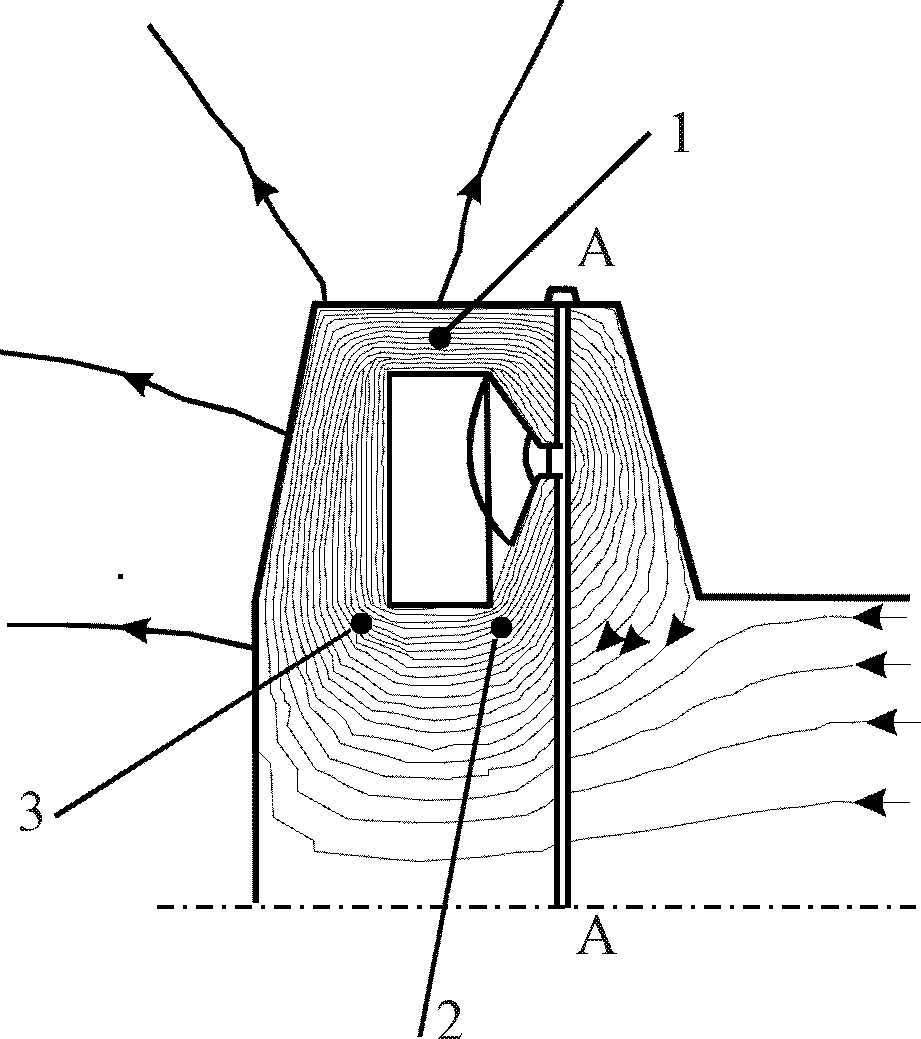
налогичные картины магнитных полей получены и в других вариантах моделей ЭМД.
Г
Рис. 3. Картина магнитного поля опытного
образца ЭМД с номинальным усилием Р=10 кН:
1, 2, 3 – зоны максимальной индукции
Рис. 4. Изменение индукции в сечении А-А
(вдоль радиуса R) воздушного зазора думмиса
при различных значениях развиваемого
усилия P: 1 – Р=10 кН; 2 – Р=40 кН;
3 – Р=70 кН; 4 – Р=100 кН


шлица
рафики распределения индукции в середине воздушного зазора (вдоль линии А-А, рис.3) для ЭМД силового ряда
 приведены на рис.4. Из них видно, что магнитные поля в зазоре неравномерны. В центральной части зазора значения индукции превышают расчетные, а в области шлицев – резко снижаются.
приведены на рис.4. Из них видно, что магнитные поля в зазоре неравномерны. В центральной части зазора значения индукции превышают расчетные, а в области шлицев – резко снижаются.Н
Рис. 5. Зависимости развиваемого думмисом усилия Р и максимальной индукции сердечника Вmax от
плотности тока: - Р=10 кН; - Р=40 кН; - Р=70 кН; - Р=100 кН; 1 – усилие думмиса, 2 – максимальная индукция думмиса
а рис.5 представлены силовые и магнитные характеристики исследованных вариантов ЭМД (развиваемые усилия Р, значения максимальной индукции сердечника Вmax) в зависимости от плотности тока в катушке
. Они иллюстрируют характер изменения указанных параметров. Так, при предельных для данной конструкции значениях тока развиваемые усилия превышают номинальные величины, однако при этом насыщение системы становится выше допустимого, что отразится на прочностных показателях конструкционных материалов.Т
 аким образом, выполненные расчеты позволили с достаточной степенью точности определить основные конструкционные размеры думмисов, обеспечивающие установленные номинальные параметры, характеристические соотношения их силовых и электромагнитных показателей, сделать заключение об эффективности предлагаемого проектного решения.
аким образом, выполненные расчеты позволили с достаточной степенью точности определить основные конструкционные размеры думмисов, обеспечивающие установленные номинальные параметры, характеристические соотношения их силовых и электромагнитных показателей, сделать заключение об эффективности предлагаемого проектного решения.Следующий этап исследования был посвящен созданию технического образца электронной системы автоматического управления осевой нагрузкой на ротор турбомашины, оснащенной ЭМД предлагаемой конструкции, который позволит стабилизировать аксиальное усилие, действующее на упорный подшипник.
Р
азработанная система автоматического управления представляет собой двухконтурную систему подчиненного регулирования, содержащую два контура регулирования: тока и осевого усилия (рис.6).
Рис. 6. Структурная схема двухконтурной системы стабилизации осевого усилия:
РОУ – регулятор осевого усилия; РТ – регулятор тока; ПН – преобразователь напряжения;
ДТ – датчик тока; ДОУ – датчик осевого усилия; U3 –задание на приращение усилия
на подшипник; PОС - приращение аэродинамической составляющей осевого усилия;
FОС – приращение усилия на подшипник; КТ – контур тока; 1/р – передаточная функция
интегрирующего звена; R, i – сопротивление и ток думмиса; (i) – вебер-амперная
характеристика электромагнита; Pэм(i) – зависимость силы электромагнита от тока
Регулятор тока настраивается таким образом, чтобы компенсировать постоянную времени ЭМД, обеспечивая заданное быстродействие контура питания.
Регулятор осевого усилия поддерживает постоянную величину осевого давления, сравнивая сигнал датчика осевого усилия с заданием U3, формирующим приращение усилия на подшипник.
Подчиненный контур регулирования тока (КТ), состоящий из регулятора тока (РТ), преобразователя напряжения (ПН), датчика тока (ДТ) и электрической цепи электромагнита, обеспечивает динамические свойства последнего.
В
 нешний контур, служащий для регулирования аксиального давления энергоблока, включает датчик осевого усилия (ДОУ), установленный в упорных колодках подшипника, измерительный усилитель и регулятор осевого усилия (РОУ).
нешний контур, служащий для регулирования аксиального давления энергоблока, включает датчик осевого усилия (ДОУ), установленный в упорных колодках подшипника, измерительный усилитель и регулятор осевого усилия (РОУ).Динамические параметры спроектированной системы автоматического регулирования развиваемых в турбомашинах аэродинамических сил аксиального направления были исследованы на специальном экспериментальном стенде с использованием цифрового осциллографа.
Результаты этих исследований представлены на рис.7, где кривая 1 иллюстрирует заданный теоретический наброс осевой нагрузки на ротор турбомашины
 , к
, к Рис.7. Зависимости осевого усилия Р
от времени t при набросе нагрузки турбины:
1 – теоретическая, 2 - экспериментальная
ривая 2 – полученное экспериментально значение развиваемого думмисом компенсирующего усилия.
Результаты измерения свидетельствуют о достаточно высокой степени согласования исследованных характеристик между собой, а их локальных значений – с расчетными показателями.
Таким образом, спроектированная двухконтурная система регулирования вполне может обеспечить стабилизацию действующего на упорный подшипник осевого усилия в энергоблоках, обладает достаточной надежностью и высоким быстродействием. Оснащение такими системами автоматического управления турбомашин стационарного и транспортного типов позволит значительно повысить их работоспособность и долговечность, улучшит маневренность энергоустановок, существенно сократит эксплуатационные расходы.
СПИСОК ЛИТЕРАТУРЫ
1. Гоголев, И.Г. Аэродинамические факторы и надежность турбомашин/ И.Г. Гоголев, А.М. Дроконов, А.Е. Зарянкин. – Брянск: Грани, 1993. – 168 с.
2. Гоголев, И.Г. Обеспечение надежности и долговечности упорных подшипников скольжения турбомашин/ И.Г. Гоголев, А.М. Дроконов, А.Д. Николаев// Вестн. БГТУ. – 2007. - №3. – С.21-28.
Материал поступил в редколлегию 26.03.08.