
Общая характеристика Актуальность темы исследования
| Вид материала | Документы |
- I. общая характеристика работы актуальность темы исследования, 263.23kb.
- Общая характеристика работы актуальность темы исследования, 305.28kb.
- Общая характеристика работы актуальность темы диссертационного исследования, 329.52kb.
- С. В. Горбунов общая характеристика работы актуальность темы исследования, 371.63kb.
- I. общая характеристика работы актуальность темы диссертационного исследования, 1929.01kb.
- Общая характеристика работы Актуальность исследования, 354.73kb.
- Общая характеристика работы актуальность темы исследования, 705.68kb.
- Общая характеристика работы актуальность темы диссертационного исследования, 465.87kb.
- I. общая характеристика работы актуальность темы исследования, 450.44kb.
- Общая характеристика работы актуальность темы исследования, 441.48kb.
МАТЕМАТИЧЕСКОЕ И ИНФОРМАЦИОННОЕ ОБЕСПЕЧЕНИЕ
ВНЕДРЕНИЯ СПУТНИКОВОЙ ТЕХНОЛОГИИ В
АВТОМАТИЗИРОВАННЫХ СИСТЕМАХ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДОВ НА ВНУТРЕННИХ ВОДНЫХ ПУТЯХ
Работа выполнена в Санкт–Петербургском государственном университете водных коммуникаций
Санкт-Петербург
Общая характеристика
Актуальность темы исследования. Речной транспорт России является составной частью единого транспортно-дорожного комплекса страны, обеспечивающего внутрироссийские и внешнеэкономические транспортные связи страны. Внутренние водные пути Российской Федерации являются важным и ответственным звеном транспортной системы с особым значением для обеспечения перевозок в районах Севера, Сибири и Дальнего Востока, где другие виды транспорта пока еще не получили необходимого развития.
На деле, в силу экономических причин последних лет, существует значительная диспропорция между уровнем оснащения флота и оснащением береговых служб, отвечающих за управление движением и обеспечением безопасности судоходства. Этот технологический разрыв имеет тенденцию к увеличению.
Особенно остро проблема перехода с лоцманских методов проводки к инструментальным методам судовождения с использованием спутниковых технологий и их функциональных дополнений встает при плавании на внутренних водных путях (ВВП).
При существующем состоянии картографического обеспечения ВВП использование навигационной аппаратуры потребителя (НАП) глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС или ГЛОНАСС/GPS представляется возможным только в комплексе с установкой системы отображения электронных навигационных карт и информации (СОЭНКИ), которая также должна быть обеспечена коллекцией электронных навигационных карт (ЭНК). Однако в настоящее время ЭНК охвачено весьма ограниченное количество районов ВВП единой глубоководной системы Европейской части Российской Федерации (ЕГС ЕЧ РФ). Следует также отметить, что для подавляющего числа малотоннажных речных судов установка СОЭНКИ представляется экономически нецелесообразной.
Данная работа признана обеспечить использования инструментальных методов судовождения на ВВП РФ с применением информации дифференциального режима ГНСС ((Д)ГЛОНАСС/(D)GPS) и электронной картографии в автоматизированных системах управления движением судов (АСУДС).
Цели и задачи исследований.
- Анализ современного состояния использования спутниковых навигационных систем и их функциональных дополнений на ВВП РФ.
- Новое решение разработки и обоснования актуальной научной задачи повышения безопасности судоходства в районах АСУДС ВВП, на основе высокоточного радионавигационного спутникового оборудования и их функциональных дополнений.
- Анализ картографического обеспечения на ВВП РФ с целью определения возможности использования инструментальных методов судовождения и повышения уровня безопасности эксплуатации судов на ВВП.
- Оценка точности определения координат НАП ГНСС ГЛОНАСС/GPS с учетом дифференциальных поправок контрольно-корректирующих станций (ККС) в статическом и динамическом режимах позиционирования судов на ВВП.
- Исследование результатов натурных экспериментальных измерений с математическим расчетом навигационного поля, создаваемого ККС в зоне ответственности систем управления движением судов (СУДС) на ВВП.
Объектом исследования является применение существующих и перспективных спутниковых навигационных систем и их функциональных дополнений на участках АСУДС ВВП, позволяющие повысить безопасность и эффективность судоходства.
Предметом исследования является математическое и информационное обеспечение использования спутниковых навигационных систем и их функциональных дополнений в АСУДС на ВВП ЕГС Европейской части РФ.
Методологической основой исследований являются принципы системного анализа, методы теории решений, методы теории алгоритмов, в том числе, алгоритмов математического моделирования движения судна как динамического объекта, планирование эксперимента, методы математической статистики для обработки результатов экспериментальных исследований.
Научная новизна и положения, выносимые на защиту:
- Оценка современного состояния и перспектив использования спутниковых навигационных систем и их функциональных дополнений в АСУДС на внутренних водных путях России.
- Метод создания наборов путевых точек для мониторинга и автоматизированного управления на маршрутах плавания на ВВП РФ, и оценки точности координат в динамическом и статическом режимах позиционирования судна.
- Алгоритмы математического моделирования работы системы автоматического управления движением судна в зоне ответственности СУДС на ВВП.
- Методика статистической обработки результатов натурных экспериментальных измерений с математическим расчетом навигационного поля, создаваемого ККС в зоне ответственности СУДС на ВВП.
Практическая ценность работы состоит в том, что сформулированные выводы и рекомендации могут быть использованы при реализации на ВВП Постановления Правительства Р.Ф. № 365 от 9 июня 2005г., с поправками к постановлению от 25 августа 2008г. № 641 «Об оснащении транспортных технических средств и систем аппаратурой спутниковой навигации ГЛОНАСС или ГЛОНАСС/GPS».
Реализация научных результатов. Отдельные положения диссертационной работы реализованы в Санкт-Петербургском Государственном университете водных коммуникаций, в ГБУ «Волго-Балт» и «Азово-Донском» ГБУВПиС при оценке точности позиционирования в зоне первой на ВВП ККС "Шексна" в п. Иванов Бор и ККС «Ростов–на–Дону» в Кочетовском гидроузле.
Публикации работы. Основные результаты работы опубликованы в семи научных изданиях, в том числе, в трех изданиях, рекомендованных Высшей аттестационной комиссией Министерства образования и науки Российской Федерации.
Апробация работы осуществлена на международной научно-практической конференции «Перспективы внедрения Глобальной спутниковой системы ГЛОНАСС/GPS в целях картографического обеспечения ВВП» (СПб, СПГУВК, 2005г.) и международном научно-техническом семинаре «Современное состояние электронной картографии для морской и речной навигации» (СПб, ГМА им. адм. С.О. Макарова, 06 – 07 февраля 2008г.).
Объем и структура работы. Диссертация состоит из введения, четырех глав, заключения, списка опубликованных источников, содержащего 106 отечественных и зарубежных работ, включает в себя 166 страниц текста, 51 рисунка, 16 таблиц и графиков, 1 приложение.
Содержание работы
В ПЕРВОЙ ГЛАВЕ произведена оценка существующих и перспективных спутниковых навигационных систем (ГЛОНАСС, GPS, GALILEO) и их функциональных дополнений на внутренних водных путях.
Систему ГНСС в ближайшее время ожидают значительные перемены. Основных изменений будет три. Первое: Министерство обороны США начало модернизацию системы GPS, таким образом, гражданский канал пополнится еще двумя новыми частотами. Второе: Российская Федерация объявила о грядущих нововведениях, которые коснутся созвездия спутников ГЛОНАСС. И, наконец, ведется работа по вводу в эксплуатацию европейской спутниковой системы GALILEO – аналога российской ГЛОНАСС и американской GPS. Три вышеуказанных факта откроют огромные возможности в области высокоточного позиционирования.
Представлены требования к перспективной НАП (Д)ГЛОНАСС/(D)GPS для речного транспорта и рекомендации по ее техническим возможностям, удовлетворяющие требованиям АСУДС на ВВП.
Новое поколение космических аппаратов (КА) систем ГЛОНАСС и GPS смогут передавать навигационные сигналы для гражданских потребителей в двух и даже в трех диапазонах частот. При использовании в НАП приемовычислителей, способных измерять псевдодальности на двух или трех частотах влиянием ионосферы можно пренебречь, и в большинстве случаев обеспечить требуемую для речных судов точность местоопределения в штатном режиме. Однако из анализа обеспечения целостности радионавигационного поля можно сделать вывод, что для речных судов в условиях ограниченных габаритов судового хода локальные дифференциальные подсистемы (ЛДПС) являются наиболее предпочтительными.
Создание сплошного дифференциального поля на ВВП ЕГС ЕЧ РФ обеспечит возможность создания инструментальных методов проводки судов, с использованием математического и картографического обеспечения.
ВО ВТОРОЙ ГЛАВЕ произведен подробный анализ картографического обеспечения автоматизированных систем управления движением судов на ВВП.
Традиционное использование относительных методов навигации для лоцманской проводки судов на ВВП привело к тому, что в отличие от морских навигационных карт, речные лоцманские карты и планы оказались не приспособленными для непосредственного перевода их в цифровую форму с целью создания ЭНК. Первым успешным опытом в этом направлении было создание Тома 3 ЕГС картографическим бюро ГБУ Волго-Балт, когда по его заказу Росаэрогеодезия произвела съемку знаков СНО с точностью 2 м для карт масштаба 1: 10 000.
Переход к абсолютным методам навигации для инструментальной проводки судов на ВВП однозначно показал экономическую целесообразность создания единой базы как для навигационных карт на бумажном носителе, так и для ЭНК.
Учитывая сравнительно небольшой тоннаж речных судов по сравнению с морскими судами, следует принимать во внимание особую чувствительность судовладельцев к стоимостным характеристикам СОЭНКИ и самого картографического обеспечения. В этой связи для речных судов кроме векторных ЭНК имеют право на применение растровые карты и более того, использование маршрутных координат и режима «фарватер» в НАП на малых судах позволит обойтись без использования традиционных СОЭНКИ. При этом НАП должны иметь опцию ввода маршрутных точек с внешних электронных носителей, например с Flash USB.
Представлен метод математического создания наборов путевых точек для мониторинга и автоматизированного управления на маршрутах плавания на ВВП РФ, и оценки точности координат в динамическом и статическом режимах позиционирования судна. Постпроцессорная математическая обработка координатной информации была выполнена на основе результатов натурных испытаний проведенных сотрудниками СПГУВК на т/х «Сергей Киров» по участку ВВП г. Москва – г. Санкт-Петербург с 16 ноября 2005г. по 23 ноября 2005г.
В IMO для оценки точности принята предельная погрешность определения координат судна P = 0,95 (2СКП - среднеквадратическая погрешность).
Следует различать точность определения координат в статике и в динамике при движении судна. Координаты начальной и конечной путевых точек (ПТ) маршрута рекомендуется определять во время стоянки судна в статическом режиме.
Так например на Рис.1(слева) представлены результаты обработки измерений в абсолютном режиме: среднее арифметическое значение (САЗ) широты 55°50.79333' при СКП 1.245 м; САЗ долготы 037°28.14744' при СКП по долготе 0.749 м; САЗ значение высоты + 176.68 м при СКП по высоте 2.09 м. Результаты обработки измерений в дифференциальном режиме составили: САЗ широты 55°50.79150' при СКП 0.579 м по широте; САЗ долготы 037°28.14822' при СКП 0.894 м по долготе; САЗ высоты + 173.98 м при СКП 1.91м. по высоте (Рис.1.(справа)).
Р
 ис.1. Результаты обработки измерений в абсолютном режиме
ис.1. Результаты обработки измерений в абсолютном режиме(слева) и в дифференциальном режиме (справа)
Как видим, характер распределения погрешностей при дифференциальном режиме значительно отличается от абсолютного режима.
Погрешность определения координат в рабочей зоне (на удалении от радиомаяка 390 – 400 км) в режиме «статика» не превышает 3 – 4 м для вероятности 95%, что соответствует требованиям Резолюции IMO А.815(19).
Для создания набора ПТ маршрута плавания в динамике с требуемой для речных условий точностью предлагается использовать теорию случайных процессов для аппроксимации траектории (трека) судна по данным НАП в процессе рейса. С этой целью производится непрерывная (с интервалом 1 с) запись с выхода НАП в персональный компьютер первой строки GGA формата NMEA 0183 при движении судна для создания траектории в динамическом режиме. Затем, в ходе постпроцессорной обработки координатной информации траектории получают графическое представление ее цифровой формы, т.е. совокупность точек отображающих траекторию судна в прямоугольных координатах в режиме реального времени в соответствующем масштабе (Рис.2).
При обработке координатной информации траектории движения, которая аппроксимируется отрезками прямых линий с количеством точек траектории на каждом отрезке более 2, и криволинейные участки ВВП с количеством точек траектории более 3, которые следует аппроксимировать дугами окружностей при обработке траектории. Расчет параметров уравнений первого и второго порядков, можно выполнить, в
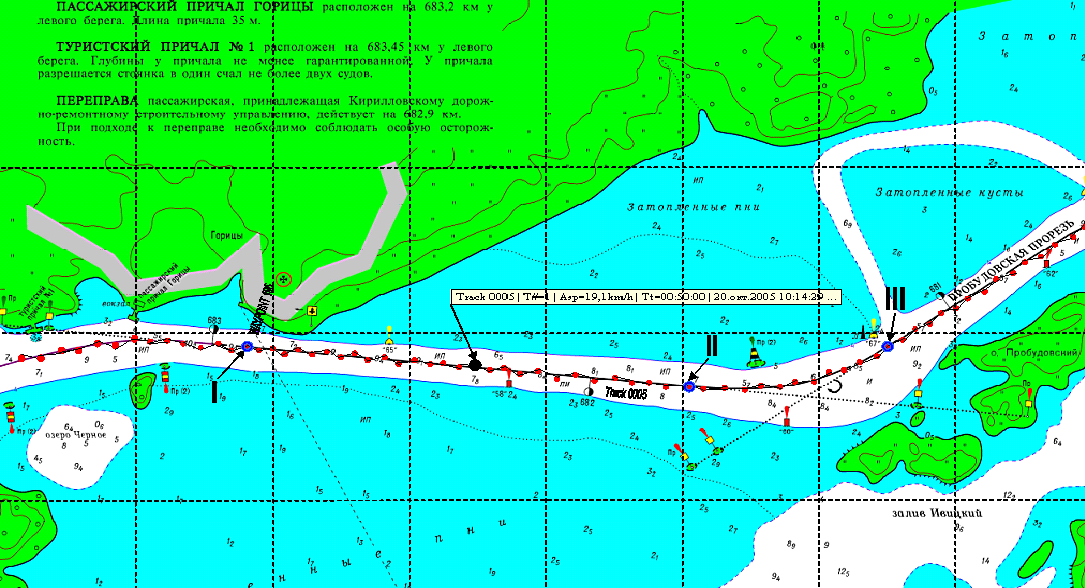 оспользовавшись методом наименьших квадратов.
оспользовавшись методом наименьших квадратов.Рис.2. Путевые точки судового хода I, II, III и запись маршрута плавания с использованием НАП (Д)ГЛОНАСС/(D)GPS на т/х «Сергей Киров» при подходе к пассажирскому причалу Горицы 680км – 683км (Том III, Часть 2, Лист 26)
Обработку отрезков траектории движения судна рекомендуется производить с использованием аналитического метода аппроксимации, например, с использованием любого графоаналитического продукта (MatCad, MapAple и т.д.), который позволяет упростить процесс обработки координатной информации (Рис. 3.).
В результате аппроксимации получается аппроксимированное уравнение траектории, из которого определяются начальная и конечная ПТ обработанного прямолинейного участка, а для криволинейного участка берутся точки с определенным интервалом.
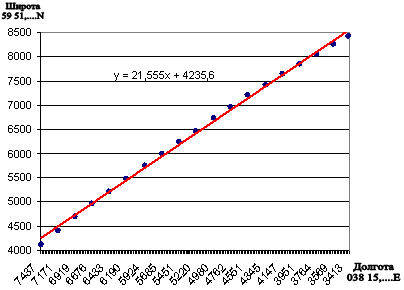
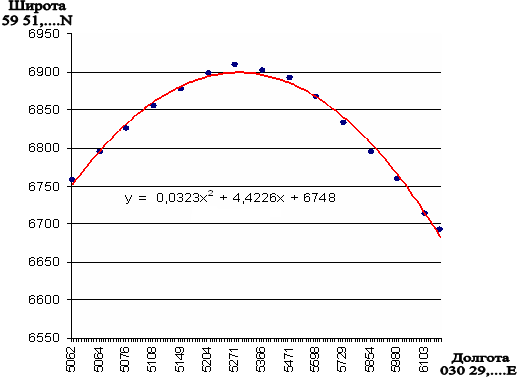
Рис.3. Пример аппроксимации линейного участка траектории судна (слева) и аппроксимации криволинейного участка траектории судна (справа)
Среднеквадратичная погрешность аппроксимации путевых точек зависит от длительности движения судна на отрезке траектории и интервалов времени, через которые определяются координатные точки:
 (1)
(1)где σk – СКП измерения при определении координат маршрутной точки относительно вычисленного постпроцессорной обработкой маршрута; Δi – случайная погрешность измерения координатной точки с учетом погрешности управления судном, относительно вычисленного маршрута при постпроцессорной обработкой маршрута; n – количество координатных точек на аппроксимированном отрезке траектории, равное отношению длины отрезка траектории к интервалу времени определения координат.
Полученный результат по разработке методики математического создания наборов путевых точек для маршрутов плавания с использованием НАП (Д)ГЛОНАСС/(D)GPS на ВВП позволяет по новому решать задачи программного и алгоритмического обеспечения проводки судна в автономном режиме и в зоне ответственности СУДС.
ТРЕТЬЕЯ ГЛАВА посвящена исследованию возможности построения системы автоматического управления движением судна, ориентированной на использование в качестве главных источников навигационной информации данные указателя скорости поворота (УСП) судна, НАП совместной системы (Д)ГЛОНАСС/(D)GPS и путевых маршрутов. В этой связи, был реализован модифицированный алгоритм математической модели, описывающий работу САУ.
Математическая модель управляемого движения судна представляет собой систему дифференциальных уравнений, описывающую произвольное движение судна. В общем случае криволинейного движения судно обладает шестью степенями свободы. Однако в рассматриваемых в диссертации задачах, связанных с управляемостью водоизмещающих судов в зоне ответственности СУДС, креном, ходовым деферентом и качкой судна, можно пренебречь. Это позволяет при построении математической модели движения судна рассматривать только движение в горизонтальной плоскости. Основу математической модели движения судна составляют выражения для сил, действующих на подводную и надводную части корпуса судна, а также на его движительно-рулевой комплекс (ДРК). Таким образом, уравнения движения судна в общем виде могут быть записаны как
 (2)
(2)Силы и моменты, входящие в систему уравнений (2) (
 ), были определены применительно к сухогрузному судну смешанного «река-море» плавания пр. 16290 «Балтийский – 201», имеющему следующие характеристики: длина – 89,5 м; ширина – 13,2 м; осадка – 4,5 м; движительно-рулевой комплекс – гребной винт в насадке.
), были определены применительно к сухогрузному судну смешанного «река-море» плавания пр. 16290 «Балтийский – 201», имеющему следующие характеристики: длина – 89,5 м; ширина – 13,2 м; осадка – 4,5 м; движительно-рулевой комплекс – гребной винт в насадке.Отличие разработанной модели в том, что в качестве основного источника навигационной информации предполагается использование указателя скорости поворота судна, с периодической корректировкой закона управления на основе данных, полученных от приемоиндикатора (Д)ГЛОНАСС/(D)GPS.
Математическая модель САУ движения судна по заданной траектории была реализована на основе предложенной схемы на Рис.4.
Р
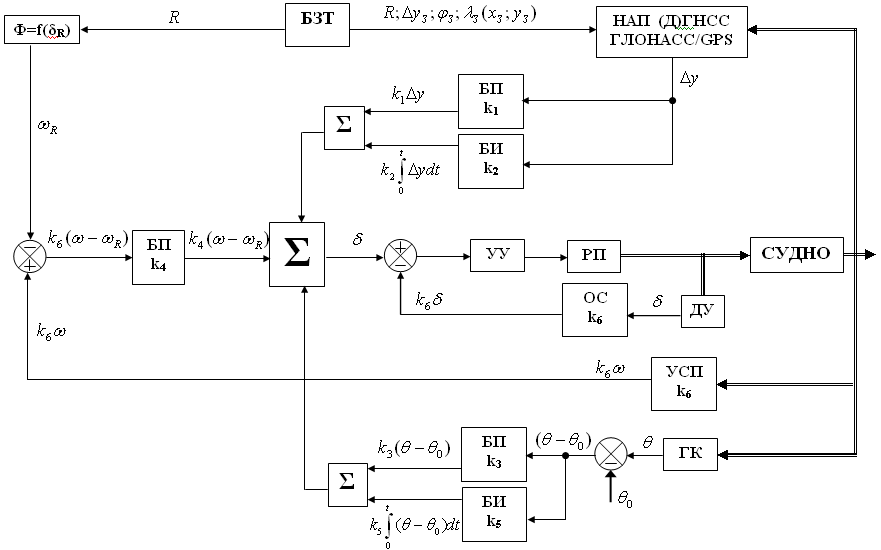 ис. 4. Функциональная схема САУ траекторией судна
ис. 4. Функциональная схема САУ траекторией суднаЗдесь: БП – блок пропорционального преобразования сигнала, БИ – блок интегрального преобразования сигнала, РП – рулевой привод, УУ – управление устройством РП, ОС – блок обратной связи, ДУ – датчик угла поворота баллера руля; УСП – указатель скорости поворота, ГК – гирокомпас, НАП (Д)ГНСС – блок НАП Глобальной Навигационной Спутниковой Системы, БЗТ – блок задания траектории (программа записи маршрута на флэш-памяти), Φ = f(δR) – блок нелинейной коррекции, который определяется диаграммой управляемости судна и определяет скорость поворота судна в режиме циркуляции, R – заданный радиус поворота.
В этом случае, закон управления на прямом участке в этой системе определяется выражением:
 (3)
(3)где, δ – угол перекладки руля; k1 – коэффициент обратной связи (КОС) по текущему поперечному смещению; ∆y – текущее поперечное смещение от оси маршрута по НАП (Д)ГНСС ГЛОНАСС/GPS; k2 – коэффициент обратной связи по интегральному поперечному смещению; t – время; k3 – коэффициент обратной связи по углу отклонения от курса; k4 – коэффициент обратной связи по угловой скорости; k5 – коэффициент обратной связи по интегральному отклонению от курса, k6 – коэффициент обратной связи по УСП, θ – текущий курс судна, θ0 – заданный курс судна, ω – угловая скорость, ωR – установившаяся угловая скорость на повороте.
При отработки отклонения от заданного маршрута расчет величины “∆у” и интегрального поперечного смещения производится при поступлении данных с НАП (Д)ГНСС ГЛОНАСС/GPS. В промежутке времени между обновлением данных (Д)ГЛОНАСС/(D)GPS в расчете используется последнее вычисленное значение “∆у”. При переключении САУ в режим движения на повороте закон управления примет следующий вид:
 (4)
(4)Оценка зон устойчивости работы САУ производилась по переходному процессу, как реакция системы на ступенчатое изменение курса на 1 градус по всем заложенным в модель параметрам. В качестве примера на Рис.5 приведен вид переходного процесса для коэффициента k4.
Проведенный анализ показал, что разработанный модифицированный алгоритм САУ обеспечивает стабильное удержание судна на заданной траектории, на основе навигационной информации, получаемой от указателя угловой скорости поворота и НАП (Д)ГЛОНАСС/(D)GPS, позволяет выполнить оценку безопасности движения судов при различных экстремальных внешних воздействиях с учетом ограничений участков в СУДС на ВВП и выявить необходимость увеличения числа маршрутных путевых точек.
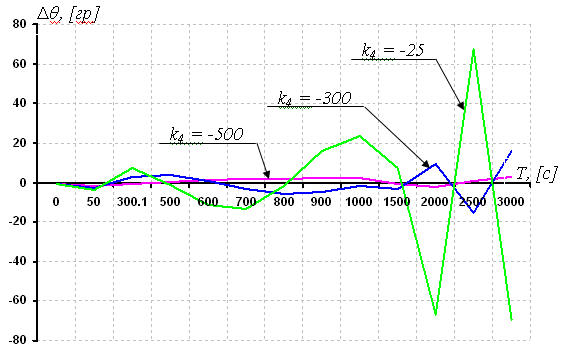
Рис.5. Графики устойчивости САУ при разных заданных коэффициентах
Для адекватной оценки работы САУ по маршруту путевых точек в зоне ответственности СУДС на ВВП Европейской части РФ необходимо оценить радионавигационное поле создаваемое ГНСС ГЛОНАСС/GPS и их функциональными дополнениями.
В ЧЕТВЕРТОЙ ГЛАВЕ проведено исследование результатов натурных испытаний НАП (Д)ГЛОНАСС/(D)GPS с картографическим обеспечением на ВВП РФ.
С целью оценки рабочих зон функциональных дополнений ГНСС был выполнен теоретический расчет влияния поликомпонентной подстилающей поверхности Земли на качество приема дифференциальных поправок НАП (Д)ГЛОНАСС/(D)GPS в Европейской части ВВП РФ по методу непосредственного определения дальности распространения радиоволны СВ диапазона, базирующийся на модели представления поликомпонентной подстилающей поверхности участками N=αn+βm с последующей сшивкой граничных сегментов поверхности. Такая модель позволяет аппроксимировать сколь угодно большое число участков поликомпонентной подстилающей поверхности и выявлять области, содержащие нелинейные переходы между ее сегментами. Здесь основным является определение нелинейного множителя функции ослабления, имеющей вид для сегмента, состоящего из двух отрезков:

(5)
Нелинейный множитель ослабления для сегмента, состоящего из трех отрезков, имеет вид:
(6)
Были сопоставлены точностные данные аналитических расчетов с применением указанного метода и натурных измерений напряженности поля (Ем), создаваемого передатчиком ККС «Ростов – на – Дону» (Рис.6.).
В результате сопоставительного анализа расчетов и натурных испытаний были получены следующие статистические характеристики электромагнитного поля ККС: математическое ожидание Ем = 10.8 [мкВ/м] и СКП = 27.4 [мкВ/м].
Р
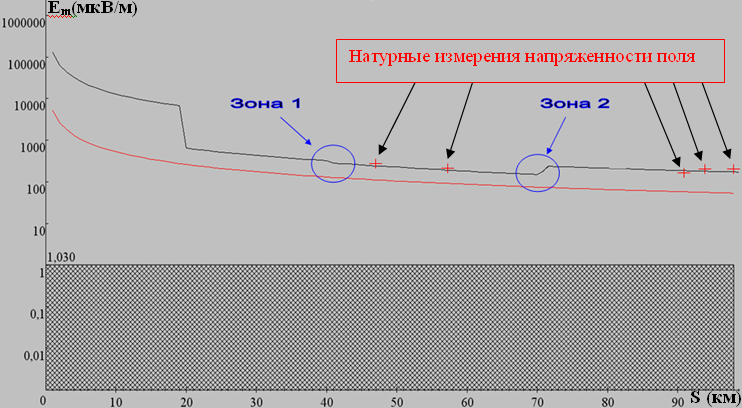 ис.6. Результаты аналитического расчета и натурных испытаний радионавигационного поля создаваемого ККС «Ростов-на-Дону»
ис.6. Результаты аналитического расчета и натурных испытаний радионавигационного поля создаваемого ККС «Ростов-на-Дону»П
 осле выполнения процедуры определения формы периметра зоны действия ККС, указанная зона была нанесена на реальную карту (Рис. 7.).
осле выполнения процедуры определения формы периметра зоны действия ККС, указанная зона была нанесена на реальную карту (Рис. 7.).Рис. 7. Расчетная зона ККС «Ростов-на-Дону»
На основе проведения натурных испытаний с 2005 по 2006 г.г. в разные времена года, по маршруту г. Москва – г. Санкт-Петербург была определена дальность действия высокоточного дифференциального поля в интересах пользователей НАП на ВВП на примере одной из ККС «Шексна». Дальность приема дифференциальных поправок составила свыше 435 км при напряженности поля ≥20 мкВ/м и отношении С/Ш ≥ 11 Дб (Рис.8.).
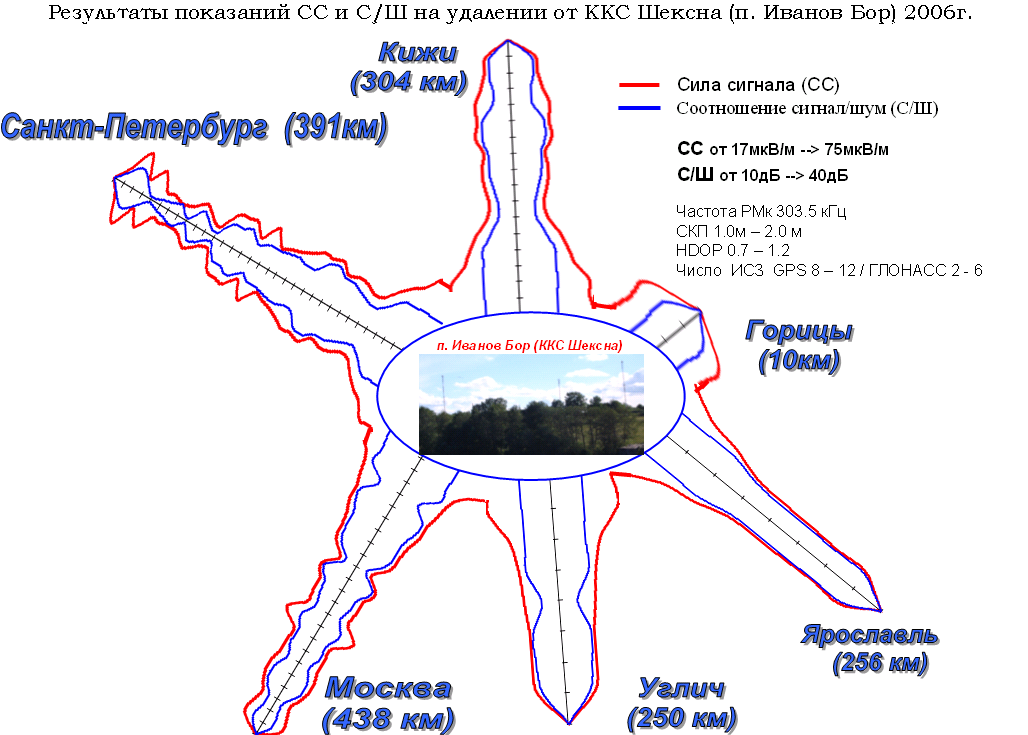
Рис.8. Условия приема сигнала дифференциальных поправок от ККС «Шексна» по ПКИ
В результате полученных расчетных измерений были внесены коррективы в антенное согласующее устройство ККС, которые позволили обеспечить перекрытие зон уверенного приема корректирующей информации от ККС «Шепелево» и ККС «Шексна» на 60 км.
В ходе сопоставительного графоаналитического анализа были получены весьма удовлетворительные совпадения точностных оценок определения напряженности поля в точке приема данных аналитического расчета и натурных испытаний для рассматриваемой ККС, что позволит ускорить использование инструментальных методов судовождения на ВВП.
Основные результаты работы
Настоящая диссертационная работа посвящена новому решению актуальной научной задачи по повышению безопасности судоходства в районах ответственности речных АСУДС, на основе разработки и использования инструментальных методов судовождения с применением информации (Д)ГЛОНАСС/(D)GPS и электронной картографии, имеющей важное значение для речного транспорта России.
На этом пути получены следующие новые научные результаты:
1. Выполнена оценка современного состояния и перспектив развития спутниковых навигационных систем и их функциональных дополнений в АСУДС на внутренних водных путях России. Исследован переход к абсолютным методам управления, для инструментальной проводки судов на ВВП, который однозначно доказывает экономическую целесообразность создания единой базы как для навигационных карт на бумажном носителе, так и для электронных навигационных карт.
2. Предложенный в работе метод оценки точности координирования маршрутных точек в динамическом режиме позволяет оценить качество позиционирования на ходу судна, исключить погрешности управления судном и получить набор путевых точек с максимально возможной для данных условий точностью. Метод создание наборов путевых точек для маршрутов плавания на ВВП, предложенный в настоящей работе, представляется достаточно трудоемким для судоводительского состава, особенно с учетом корректуры путевых условий. Поэтому целесообразно, чтобы наборы путевых точек и маршрутов рассматривались в качестве самостоятельного продукта картографического обеспечения ВВП.
3. Алгоритмы математического моделирования работы САУ обеспечивают стабильное удержание судна на заданной траектории на основе навигационной информации, получаемой от указателя угловой скорости поворота с периодической корректировкой закона управления на основе данных, полученных от НАП (Д)ГЛОНАСС/(D)GPS, что позволяет выполнить оценку безопасности движения судов при различных экстремальных внешних воздействиях с учетом ограничений участков ВВП и выявить необходимость увеличения числа путевых точек на маршруте плавания.
4. На основе сопоставительного анализа математического расчета зоны действия ККС «Ростов–на–Дону» с помощью метода непосредственного определения дальности распространения сигналов ККС, базирующейся на аппроксимационной модели сегментации поликомпонентной подстилающей поверхности, и данных натурных измерений напряженности высокоточного радионавигационного поля, создаваемого ККС «Ростов–на–Дону», были получены весьма удовлетворительные совпадения точностных оценок определения напряженности поля в точке приема данных аналитического расчета и натурных испытаний для рассматриваемой ККС, что позволит ускорить использование инструментальных методов судовождения на ВВП.
Публикации по теме диссертации
В изданиях, предусмотренных “Перечнем изданий ВАК”:
1. А.В. Гусаковский, В.Д. Ракитин, О.В. Соляков, Ю.В. Яцук. «Математическое моделирование работы системы автоматического управления движением судна». Журнал Морская радио-электроника «Корабли и вооружение как единая система». Выпуск 4(26) декабрь. – СПб.: Печатный дом “Белл”, 2008г., с. 14-16
2. В.В. Каретников, А.А. Сикарев, О.В. Соляков. «Влияния поликомпонентной подстилающей поверхности Земли на форму периметра зоны действия контрольно-корректирующих станций». Журнал Морская радио-электроника «Корабли и вооружение как единая система». Выпуск 1(23) март. – СПб.: Печатный дом “Белл”, 2008г., с.22-24
3. А.В. Гусаковский, О.В. Соляков. «Количественная оценка характеристик потоков ИДС информационного обслуживания». Журнал Морская радио-электроника «Корабли и вооружение как единая система». Выпуск 1(27) март. – СПб.: Печатный дом “Белл”, 2009г., с. 24-26
В других изданиях:
4. В.Д. Ракитин, О.В. Соляков. «Применение аппроксимации случайных процессов с целью получения координат путевых точек на ВВП». Межвузовский сборник научных трудов ТСС и С на морских внутренних водных путях. Под редакцией д.т.н., профессора А.А. Сикарева. – СПб.: СПГУВК, 2005г., с. 142-149
5. В.Д. Ракитин, О.В. Соляков. «Некоторые аспекты новой радиолокационной технологии». Межвузовский сборник научных трудов ТСС и С на морских внутренних водных путях. Под редакцией д.т.н., профессора А.А. Сикарева. – СПб.: СПГУВК, 2005г., с. 139-142
6. Ракитин В.Д., Соляков О.В. «Применение аппроксимации случайных процессов с целью получения координат наборов путевых точек, в качестве самостоятельного продукта картографического обеспечения». Материалы тезисов международной конференции «Перспективы внедрения Глобальной спутниковой системы ГЛОНАСС/GPS в целях картографического обеспечения ВВП». – СПб.: СПГУВК, 2005г., с. 52-55
7. Ракитин В.Д., Самарин Г.В., О.В. Соляков. «Особенности использования картографического обеспечения на речных судах внутреннего плавания при инструментальных методах проводки по данным ГЛОНАСС/GPS и их функциональных дополнений». Материалы тезисов международного научно-технического семинара «Современное состояние электронной картографии для морской и речной навигации». – СПб.: ГМА им. адм. С.О. Макарова, 2008г., с. 64-67