
Задание Структурная схема системы автоматического регулирования (сар) напряжения генератора постоянного тока (рисунок 1)
| Вид материала | Документы |
- Техническое задание 8 Структурная схема генератора пилообразного напряжения 9 Выбор, 143.71kb.
- Темы курсового проекта «Разработка системы автоматического регулирования скорости двигателя, 71.05kb.
- Вопросы по курсу "Теория автоматического управления", 38.97kb.
- Преобразователь измерительный активной мощности трехфазного тока эп8508, 237.92kb.
- Программа по специальности «Электромеханик», 312.34kb.
- ВП1 позволяет, 33.45kb.
- Описание регулятора напряжения рр363 автомобильного генератора, 155.91kb.
- Отчёт лабораторной работы №3. 3 по метрологии Тема, 26.53kb.
- Система оперативного постоянного тока, 35.15kb.
- Переходные процессы в линейных электрических цепях, 378.64kb.
Задание
Структурная схема системы автоматического регулирования (САР) напряжения генератора постоянного тока (рисунок 1).

Рисунок 1
Генератор (блок 5) описывается дифференциальным уравнением

Исходные данные (таблица 1).
Таблица 1
| Параметр | Вариант (выбирается согласно номеру по порядку в списке группы) | |||||||||
| 1, 11 | 2, 12 | 3, 13 | 4, 14 | 5, 15 | 6, 16 | 7, 17 | 8, 18 | 9, 19 | 10, 20 | |
| k1 | 1,0 | 1,1 | 1,2 | 1,3 | 1,4 | 1,5 | 1,6 | 1.7 | 1,8 | 1,90 |
| k2 | 12,0 | 11,0 | 10,0 | 9,0 | 8,0 | 7,0 | 6,0 | 5,0 | 4,0 | 3,00 |
| k3 | равен порядку первой буквы фамилии в алфавите | |||||||||
| T1 | 1,0 | 2,0 | 3,0 | 4,0 | 5,0 | 6,0 | 7,0 | 8,0 | 9,0 | 10,00 |
| T2 | 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | 0,6 | 0,7 | 0,8 | 0,9 | 1,00 |
| T3 | 0,5 | 0,8 | 1,1 | 1,4 | 1,7 | 1,5 | 1,2 | 1,0 | 0,8 | 0,60 |
| | 0,9 | 0,8 | 0,8 | 0,6 | 0,6 | 0,4 | 0,4 | 0,2 | 0,2 | 0,15 |
Примечание – точность расчетов не менее трех знаков после запятой. Все вычисления и графические построения выполняются в соответствии с теоретическими положениями, изложенными в [1-4] и конспекте лекций. Для обработки на ЭВМ используется пакет программ LinCAD. Последовательно выполняя работы, необходимо спроектировать устойчивую САР с заданными показателями качества.
Оформление отчета к лабораторному практикуму должно удовлетворять требованиям стандарта ПГУ. Допускается выполнять отчет в виде одной тетради с общим титульным листом и последовательно добавляемыми работами.
1 Исследование временных характеристик фильтра
1.1 Цель работы
Целью работы является исследование реакции на типовое воздействие во временной области звеньев (фильтров) с разной передаточной функцией.
1.2 Общие сведения
Регулярные сигналы, используемые для исследования САР, называются типовыми воздействиями. Они позволяют сравнивать свойства различных систем при равных начальных условиях и входных сигналах одинаковой формы. К типовым обычно относятся ступенчатое (скачок) A∙1(t) или функция Хевисайда, импульсное A∙δ(t) или функция Дирака, гармоническое A∙sinωt и степенное A∙tn воздействия (функции). При А = 1 воздействие называется единичным.
Любую функцию времени с допустимой погрешностью можно разложить на совокупность типовых воздействий с соответствующими коэффициентами веса. Тогда по принципу суперпозиции реакция на это воздействие определится как сумма реакций линейной системы на отдельные воздействия, принцип вычисления которых известен.
Переходной функцией h(t) называется реакция системы на единичный скачок 1(t) при нулевых начальных условиях. Реакция на скачок произвольной величины называется кривой разгона.
Импульсной (весовой) функцией g(t) называется реакция системы на единичный импульс δ(t) при нулевых начальных условиях.
Основным инженерным методом решения дифференциальных уравнений, т. е. исследования поведения САР во времени, является преобразование Лапласа, которое операции дифференцирования и интегрирования заменяет более простыми алгебраическими операциями умножения и деления на комплексную переменную s. Операторная передаточная функция (ПФ) является основной формой описания систем в операторной области по методу один вход, один выход.
Передаточной функцией W(s) называется отношение изображений по Лапласу выходной величины Y(s) к входной X(s) при нулевых начальных условиях. Обычно m ≤ n, где n – порядок системы.
По дифференциальному уравнению системы составим ПФ W(s)

 .
.В соответствии с теоремами о начальном и конечном значениях функции времени (оригинала) начальное и конечное (установившееся) значения переходной характеристики равны отношению коэффициентов при s в степени n числителя и знаменателя передаточной функции в первом случае, и отношению свободных членов ПФ (коэффициенту усиления в установившемся режиме k(∞) или kуст) во втором.
Начальное значение:

Конечное значение:
 .
.1.3 Указания к работе
Предварительно необходимо для фильтра, входящего в состав регулятора (рисунок 1) и состоящего из звеньев 1-4 , вычислить передаточные функции по выходам a, b, c, d относительно входа e сначала в общем виде, а затем с учетом численных значений своего варианта (таблица 1), используя правила структурных преобразований (приложение А).
Для получения экспериментальных переходных характеристик фильтра используется программа TIMECHAR "Временные характеристики" из библиотеки LinCAD (рисунок 2). Поочередно вводят передаточные функции фильтра Wae(s), Wbe(s), Wce(s), Wde(s) для выходов a, b, c и d на ЭВМ – сначала порядок полинома числителя и его коэффициенты, начиная со старшего, затем порядок полинома знаменателя и его коэффициенты, включая нулевые. Не забывайте, что разделителем целой и дробной частей числа у программ LinCAD является точка.
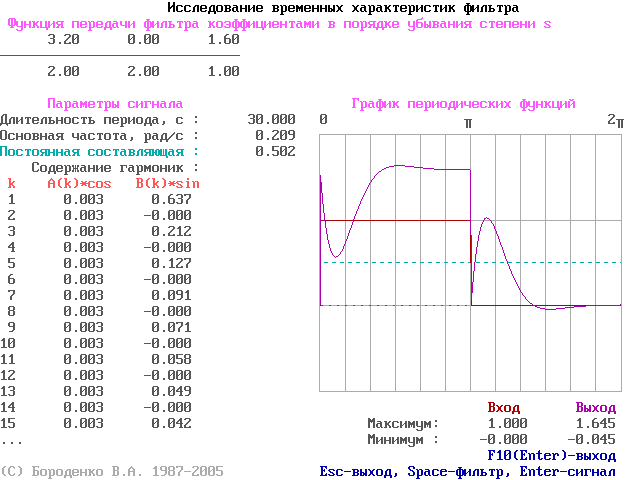
Рисунок 2
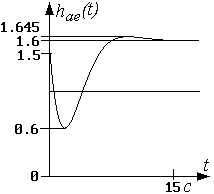
На вход фильтра подают сигнал в виде единичного скачка 1(t) и зарисовывают полученный график переходной характеристики h(t) в масштабе рядом с соответствующей передаточной функцией, определяя числовые значения всех характерных точек (начальное, конечное значения, максимум, минимум). Длительность периода исследования подбирают экспериментально так, чтобы в конце графика переходный процесс заканчивался (кривая шла горизонтально), но в то же время все параметры начальной части характеристики легко определялись. Начать подбор можно с 50-80 секунд, затем уменьшать значение до оптимального. Учитывая периодический характер сигнала, допускается зарисовывать вид реакции только за первую половину периода.
Каждый раз входное воздействие разлагается в ряд Фурье
 ,
,постоянная составляющая a0, частота первой гармоники ω и коэффициенты Ak, Bk части гармоник которого (не более пятнадцати) выводятся для иллюстрации на экран. Поскольку отклик фильтра является суммой реакций на гармонические воздействия, число m которых ограничено, отсутствие высших гармоник может искажать начальную часть кривой – снижать ее максимальное значение при t = 0.
1.4 Методический пример
Передаточная функция фильтра по выходу a относительно входа e
 .
.Переходная характеристика haе(t) должна иметь начальное значение b0/a0 = 3.2/2 = 1.6 и конечное значение bm/an = 1.6/1 = 1.6.
1.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, структурную схему фильтра с обозначениями входа и выходов, затем для каждого типа фильтра – передаточную функцию в общем виде и после подстановки численных значений, рядом полученную переходную характеристику h(t) в масштабе, с числовыми данными и обозначениями.
К защите знать назначение преобразования Лапласа, правила вычисления передаточной функции по структурной схеме, все типовые воздействия и временные характеристики. Уяснить взаимосвязь вида передаточной функции и соответствующей переходной характеристики фильтра с учетом свойств преобразования Лапласа, т.е. правил вычисления начального и конечного значений оригинала, уметь по виду передаточной функции представить вид переходной характеристики и наоборот.
2 Исследование частотных характеристик фильтра
2.1 Цель работы
Целью работы является изучение типовых частотных характеристик САР, исследование реакции на гармоническое воздействие в частотной области звеньев (фильтров) с разной передаточной функцией.
2.2 Общие сведения
Основной формой описания систем в частотной области является частотная передаточная функция или комплексный коэффициент передачи
 .
.Зависимости отношения амплитуд A() и разности фаз () выходного и входного гармонического сигналов системы от частоты в установившемся режиме называются соответственно амплитудной (АЧХ) и фазовой (ФЧХ) частотными характеристиками. АЧХ начинается при значении bm/an = kуст и заканчивается в нуле (для m
Обобщающей является амплитудно-фазовая частотная характеристика (АФЧХ или просто АФХ) – графическое изображение частотной передаточной функции W(jω) на комплексной плоскости.
Кривая (годограф), которую чертит на комплексной плоскости конец вектора
 при изменении частоты ω от 0 до +∞, называется АФЧХ.
при изменении частоты ω от 0 до +∞, называется АФЧХ.Реакцию системы на гармоническое воздействие любой частоты ω в показательной форме получают путем умножения на А(ω) при этой частоте амплитуды входного сигнала и добавления φ(ω) к его фазе.
Частотные характеристики системы можно изменять желаемым образом с помощью специальных корректирующих звеньев (фильтров). Фильтром называется четырехполюсник, предназначенный для выделения из состава сложного входного сигнала частотных составляющих, расположенных в полосе пропускания, и подавления частотных составляющих, расположенных в полосе задерживания.
В зависимости от взаимного расположения полос пропускания и задерживания различают (рисунок 3):

а б в г
Рисунок 3
а) фильтр низких частот (ФНЧ) с полосой пропускания от нуля до 2 и полосой задерживания от частоты з2 > 2 до бесконечности;
б) фильтр верхних частот (ФВЧ) с полосой пропускания от частоты 1 до бесконечности и полосой задерживания от нуля до частоты з1 < 1;
в) полосовой фильтр (ПФ) с полосой пропускания, заключенной между частотами 1 и 2 и полосой задерживания частот меньших, чем з1, и больших, чем з2;
г) заграждающий (режекторный) фильтр (РФ) с полосой задерживания, заключенной между частотами з1 и з2, и полосой пропускания частот меньших, чем 1, и больших, чем 2.
2.3 Указания к работе
Используя программу FREQCHAR "Частотные характеристики" из библиотеки LinCAD (рисунок 4) и рассчитанные в предыдущей работе передаточные функции фильтра по выходам a, b, c, d относительно входа e, получить на ЭВМ (для логарифмического масштаба изменения частоты) и зарисовать в отчет АЧХ и ФЧХ для каждой передаточной функции. Начальное и конечное значения частот подбирают экспериментально, так, чтобы значительное изменение АЧХ приходилось примерно на середину графика, а в левой и правой части графика АЧХ была горизонтальной (можно начать подбор с частот 0.01 и 100).

Рисунок 4
Найти для каждого типа фильтра полосы пропускания и задерживания, построив по реальным характеристикам асимптотические (прямолинейные) и определив по точкам пересечения отрезков частоты сопряжения (граничные частоты полос), обозначить, какому типу фильтра соответствует каждая передаточная функция и график. Касательные к горизонтальным и наклонным участкам АЧХ (асимптоты) можно строить прямо на экране монитора, совмещая с получаемыми графиками линейку. Значения характеристик для конкретной точки получают в окне просмотра, перемещая стрелками курсора указатель по рабочему полю к месту сопряжения отрезков (касательных).
2.4 Методический пример
Передаточная функция фильтра по выходу a относительно входа e
.Полученные амплитудная и фазовая частотные характеристики соответствуют заграждающему фильтру (РФ) с полосой задерживания на частоте ωз = 0.697 рад/с, полосой пропускания менее частоты ω1 = 0.032 рад/с и более частоты ω2 = 1.462 рад/с. Начальное значение АЧХ равно bm/an = 1.6/1 = 1.6, конечное b0/a0 = 3.2/2 = 1.6.

2.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, для каждого из четырех фильтров рассчитанную передаточную функцию и полученную характеристику в масштабе с измеренными значениями амплитуды в характерных точках, частотами пропускания, задерживания и другими необходимыми обозначениями.
К защите знать все виды частотных характеристик, их смысл, методы вычисления и построения, формулировки, типы фильтров и вид их характеристик. Уяснить связь вида передаточной функции и соответствующей амплитудной частотной характеристики, т.е. уметь по виду передаточной функции построить АЧХ фильтра в соответствующем масштабе. Уметь определить с помощью АЧХ выходной сигнал по входному для заданной частоты и типа фильтра. Объяснить названия полос пропускания и задерживания.
3 Исследование устойчивости по критерию Михайлова
3.1 Цель работы
Целью работы является изучение методов оценки устойчивости САР, исследование устойчивости системы с помощью частотного критерия Михайлова.
3.2 Общие сведения
Устойчивость – это свойство системы возвращаться в исходное состояние равновесия после снятия воздействия, выведшего систему из этого состояния.
Признаки (условия) устойчивости линейной системы:
а) физический – система устойчива, если свободная составляющая yсв(t) переходного процесса с увеличением времени стремится к нулю, неустойчива – если она стремится к бесконечности, и нейтральна, если она стремится к некоторой постоянной величине;
б) математический – для устойчивости линейной системы необходимо и достаточно, чтобы все корни характеристического уравнения имели отрицательную действительную часть(все полюса системы были левыми). Система находится на апериодической границе устойчивости, если при остальных левых корнях имеет один нулевой корень, и на колебательной (периодической) границе устойчивости, если при остальных левых корнях характеристического уравнения имеет пару чисто мнимых корней. Характеристическое уравнение образуется из знаменателя передаточной функции системы D(s) = 0.
При невозможности вычислить корни используют косвенные признаки – критерии устойчивости. Алгебраические критерии (Гурвица, Рауса) оценивают устойчивость системы по значениям коэффициентов характеристического уравнения, частотные критерии (Михайлова, Найквиста) – по виду частотных характеристик системы.
Критерий Михайлова основан на исследовании характеристической функции D(jω) = U(ω) + jV(ω), полученной из характеристического многочлена подстановкой s = jω.
Основная формулировка: система n-го порядка устойчива, если кривая Михайлова, начинаясь при =0 на действительной положительной полуоси, проходит при изменении частоты от нуля до плюс бесконечности последовательно против часовой стрелки n квадрантов комплексной плоскости.
Дополнительная формулировка (следствие или форма 2): система устойчива, если четная U() и нечетная V() функции при изменении частоты от нуля до плюс бесконечности обращаются в нуль поочередно, начиная с нечетной функции, т.е. их корни перемежаются. Для построения графика используется та же таблица частот, что и в основной форме.
3.3 Указания к работе
Предварительно следует найти главную передаточную функцию системы (рисунок 1) Wyr(s) по выходу y относительно входа r с учетом параметров блоков 5 и 6 – сначала в общем виде, затем с численными значениями данных по своему варианту (значение коэффициента обратной связи k ос принять равным единице).
Используя программу MICHCHAR "Критерий Михайлова" из библиотеки LinCAD и характеристическое уравнение системы (знаменатель передаточной функции), необходимо получить кривую Михайлова на комплексной плоскости (рисунок 5) с таблицей частот, соответствующих пересечениям кривой с осями координат и крайним точкам кривой по каждой оси. Кривая Михайлова представляет собой раскручивающуюся спираль, уходящую в бесконечность. Поэтому диапазон частот следует подобрать экспериментально, от нуля до значения частоты, при котором кривая последний раз пересекает какую-либо ось, для более точного определения координат пересечения действительной и мнимой осей и желаемого вида кривой Михайлова.

Рисунок 5
Таблица особых частот включает только минимум точек, поэтому, пользуясь перемещающимся маркером, желательно определить координаты точек, соответствующих наибольшим отклонениям по действительной или мнимой оси, и добавить их в таблицу. По расширенной таблице нужно построить кривую Михайлова в произвольном масштабе, по ее виду дать заключение об устойчивости системы. Если какой-либо оси не оказалось на графике, ее следует дорисовать приближенно, а на кривой поставить стрелку в сторону увеличения частоты.
Самостоятельно, используя полученную таблицу частот, построить графики четной U(ω) и нечетной V(ω) функций в соответствии со второй формой (следствием) критерия Михайлова, проверить сделанный ранее вывод об устойчивости системы. На всех графиках обязательно указывать порядок системы (полинома) n.
3.4 Методический пример
Характеристическое уравнение САР
D(s) = s4 + 2s3 + 3s2 + 4s + 5 = 0.
Расширенная таблица частот
| ω, рад/с | U(ω) | V(ω) |
| 0.000 | 5.000 | 0.000 |
| 0.800 | 3.490 | 2.176 |
| 1.230 | 2.750 | 1.198 |
| 1.427 | 3.037 | -0.101 |
| 1.700 | 4.177 | -2.280 |
Годограф характеристической функции D(jω)

Система неустойчива, поскольку кривая Михайлова, начинаясь на положительной действительной оси, не проходит последовательно против часовой стрелки n квадрантов комплексной плоскости, где n=4 – порядок системы.
Графики четной и нечетной функций
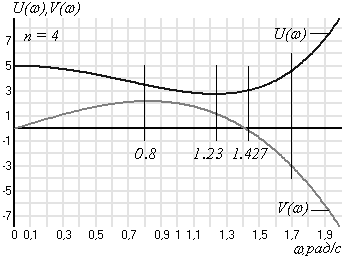
Система неустойчива, поскольку графики четной U(ω) и нечетной V(ω) функций, начинаясь с V(ω) = 0, не пересекают при возрастании частоты ось частот поочередно.
3.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, главную передаточную функцию системы в общем виде и после подстановки численных значений, характеристическое уравнение системы, полученные на ЭВМ таблицу частот и кривую Михайлова, построенный самостоятельно график четной и нечетной функций с заключением об устойчивости системы. На всех графиках должны быть указаны значения параметров в точках пересечения кривых с осями координат, порядок системы, обозначены оси и каждая кривая при количестве характеристик более одной.
К защите знать физический и математический признаки устойчивости систем, названия основных критериев устойчивости, формулировку критерия Михайлова и его следствия, методику построения кривой Михайлова вручную.
4 Выбор параметров регулятора методом D-разбиения
4.1 Цель работы
Целью работы является изучение методов проектирования систем с достижением заданных параметров устойчивости, в частности, метода D-разбиения по двум параметрам.
4.2 Общие сведения
Метод используется при синтезе систем для определения допустимых по условиям устойчивости пределов изменения некоторых параметров системы – обычно коэффициента усиления k или постоянной времени T регулятора.
Процесс построения в пространстве параметров системы областей с разным числом правых корней характеристического уравнения называется D-разбиением.
Областью устойчивости D(0) называют область в пространстве изменяемых параметров, каждой точке которой соответствуют только левые корни характеристического уравнения. Остальные D-области отличаются числом правых корней характеристического уравнения и обозначаются соответственно D(1) – область с одним правым полюсом, D(2) – с двумя и т.д.
Граница любой D-области является отображением мнимой оси плоскости корней, она соответствует совокупности значений параметров, при которых хотя бы один корень характеристического уравнения системы находится на мнимой оси.
Если система в пространстве всех своих параметров не имеет области устойчивости, она является структурно неустойчивой. На практике используют D-разбиение по одному параметру (результатом является отрезок на условной плоскости) и по двум параметрам (результатом является плоскость).
В случае D-разбиения по одному параметру все построения производят, изменяя значения одного параметра при постоянстве остальных. Чтобы получить плоскость, вещественный параметр искусственно делают двумерным, заменяя s = j с образованием мнимой оси, однако окончательным результатом является отрезок на действительной оси.
Подставив s = j в характеристическое уравнение системы, разрешают его относительно изменяемого параметра, находят четную (действительную) U() и нечетную (мнимую) V() функции. Изменяя частоту от 0 до плюс бесконечности, строят кривую D-разбиения и ее зеркальное отображение относительно действительной оси. Двигаясь по кривой от точки = - до точки = + , наносят штриховку слева от кривой. (Напомним, что кривая D-разбиения является отображением мнимой оси, а при движении по этой оси от -j к +j область устойчивости на плоскости корней располагается слева).
Направление штриховки указывает на область с наибольшим числом левых корней. При каждом переходе через кривую навстречу штриховке один корень характеристического уравнения становится правым, в обратном направлении – левым. Выбранную область-претендент D(0) проверяют на устойчивость с помощью любого критерия, подставив значение параметра из этой области в характеристическое уравнение. Поскольку изменяемый параметр является действительной величиной, его допустимые значения лежат на отрезке действительной оси, заключенном внутри области устойчивости D(0).
Критическим называется значение параметра системы или коэффициента характеристического уравнения, при котором система находится на границе устойчивости.
Для проверки области-претендента на устойчивость системы четвертого порядка удобен критерий Гурвица, у которого должны выполняться два условия: необходимое – все коэффициенты характеристического уравнения положительны, и достаточное – определитель третьего порядка 3 = a32 – a12a4 = a3·(a1a2 - a0a3) – a12a4 > 0.
4.3 Указания к работе
В работе производится выбор значения коэффициента усиления k1 регулятора, вошедшего в коэффициент характеристического уравнения an, по условию устойчивости системы при номинальных значениях остальных коэффициентов.
Предварительно следует выразить аналитически зависимость коэффициента характеристического уравнения an от коэффициента k1.
Используя программу DRAZBTWO "D-разбиение по двум параметрам" из библиотеки LinCAD и характеристическое уравнение системы из предыдущей работы, получить на плоскости параметров область устойчивости при изменении в заданном диапазоне коэффициента an и одного из коэффициентов a1 - an-1, оставив номинальными значения остальных коэффициентов. Какой из коэффициентов a1 - an-1 лучше выбрать для изменения, подбирают экспериментально по наиболее характерному проявлению областей устойчивости, при этом его значение рекомендуется задавать в пределах 0.9-1.1 номинального.
На линии, соответствующей номинальному значению неосновного коэффициента a1 - an-1, определить критическое значение an, кр , соответствующее пересечению границы области устойчивости, а в самой области устойчивости выбирается желаемое значение an приблизительно равноудаленным от границ области (рисунок 6).

Рисунок 6
Самостоятельно оценить устойчивость системы по критерию Гурвица после подстановки выбранного значения an в характеристическое уравнение. Если устойчивость системы обеспечивается, по выбранной величине an найти значение k1, которое должно использоваться во всех последующих работах взамен первоначально заданного. При нулевом значении k1 следует немного изменить выбранное значение an.
4.4 Методический пример
Характеристическое уравнение системы
D(s) = a0 s4 + a1s3 + a2 s2 + a3 s + a4= s4 + 2s3 + 3s2 + 4s + 2 = 0
Области устойчивости в пространстве коэффициентов 2 < a2 < 4 и 0 < a4 < 5
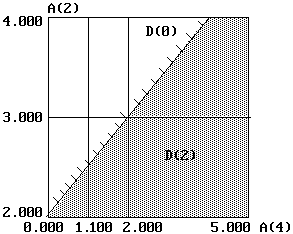
При номинальной величине a2 = 3 критическое значение a4, кр1 = 0 в сторону уменьшения и a4, кр2 = 2 в сторону увеличения, оптимальное значение по устойчивости выбираем равным a4 = 1.1.
Для проверки области-претендента на устойчивость по критерию Гурвица подставляем выбранное значение в характеристическое уравнение:
- характеристическое уравнение D(s) = s4 + 2s3 + 3s2 + 4s + 1.1 = 0;
- условие 3 = a3·(a1a2 - a0a3) – a12a4 = 8 – 4.4 =∙3.6 > 0 выполняется.
Принимая значение a4 = 1.1, находим необходимое значение коэффициента k1 = (a4 – 1)/k2k3 = (1.1 – 1)/(0.1∙10) = 0.1.
Рассчитанная с новым значением k1 передаточная функция САР
 .
.4.3 Содержание отчета
Отчет по лабораторной работе должен содержать цель работы, характеристическое уравнение системы D(s) = 0, полученный на ЭВМ график областей D-разбиения с обозначением величин и масштаба по обеим осям, обозначением областей D( ) и штриховкой в сторону области устойчивости, визир с координатами выбранной точки, критическое значение an, кр, выбранное значение an, проверку устойчивости системы при этом значении по критерию Гурвица, зависимость an от коэффициента k1, рассчитанное значение k1 и вид передаточной функции системы после подстановки k1.
К защите знать основные определения метода D-разбиения по одному параметру, порядок построения кривых, штриховки, выбора параметра, формулировки и порядок применения критериев Гурвица и Рауса, определение для критического параметра.
5 Коррекция системы методом корневого годографа
5.1 Цель работы
Целью работы является изучение методов проектирования систем по корням характеристического уравнения при заданных показателях качества регулирования.
5.2 Общие сведения
Корневые оценки учитывают влияние на вид переходного процесса положения полюсов и нулей системы на комплексной плоскости. Качество регулирования оценивают лишь для устойчивых систем.
К
 орни, ближайшие к мнимой оси, называют доминирующими, если влиянием остальных корней можно пренебречь (остальные корни находятся в 5-10 раз дальше от мнимой оси).
орни, ближайшие к мнимой оси, называют доминирующими, если влиянием остальных корней можно пренебречь (остальные корни находятся в 5-10 раз дальше от мнимой оси).Расстояние от мнимой оси до ближайшего к ней корня характеристического уравнения (пары комплексных сопряженных корней) называется степенью устойчивости αmin или η, оно характеризует быстродействие системы. Максимальное по модулю отношение мнимой части корня к действительной
 из имеющихся полюсов называется степенью колебательности системы.
из имеющихся полюсов называется степенью колебательности системы.К основным показателям качества регулирования относятся время регулирования (длительность процесса) и перерегулирование (размах качаний при переходном процессе). Для оценки времени регулирования tрег находят сначала степень устойчивости системы αmin или η, откуда при ошибке ∆=5 %
 .
.Для оценки перерегулирования определяют степень колебательности μ системы, а затем значение перерегулирования
 . При нескольких парах комплексных корней максимальное значение μ у того корня, который первым встречается лучу, проведенному из начала координат по положительной мнимой полуоси и поворачиваемому против часовой стрелки. При единственной паре комплексных корней необходимость выбора отпадает.
. При нескольких парах комплексных корней максимальное значение μ у того корня, который первым встречается лучу, проведенному из начала координат по положительной мнимой полуоси и поворачиваемому против часовой стрелки. При единственной паре комплексных корней необходимость выбора отпадает.Совокупность траекторий, описываемых на комплексной плоскости корнями характеристического уравнения замкнутой системы при изменении одного из ее параметров от 0 до ∞, называется корневым годографом.
Поскольку обычно делают оценку для замкнутой системы, то в ее характеристическое уравнение попадают и нули, и полюса разомкнутой системы. Если
 , то
, то  . Чаще всего изменяют k – коэффициент усиления регулятора, вычисляют для каждого значения корни и наносят их на комплексную плоскость.
. Чаще всего изменяют k – коэффициент усиления регулятора, вычисляют для каждого значения корни и наносят их на комплексную плоскость.При построении корневого годографа обычно используют или кратным действительным корням характеристического уравнения;
- при k, стремящемся к нулю, траектории корней начинаются в полюсах передаточной функции разомкнутой системы;
- при k, стремящемся к бесконечности, m траекторий корней заканчиваются в нулях передаточной функции разомкнутой системы, а остальные n-m ветвей асимптотически уходят в бесконечность. Здесь m – это порядок полинома числителя, а n – порядок полинома знаменателя передаточной функции системы.
5.3 Указания к работе
В работе производится выбор значения коэффициента обратной связи kос в звене 6, ранее принимаемого равным единице, по условию получения минимального времени регулирования.
Поскольку этот коэффициент попадает в свободный член характеристического уравнения an, предварительно следует выразить аналитически зависимость этого коэффициента от коэффициента kос, учитывая новое значение k1, полученное в предыдущей работе.
Используя программу ROOTLOCS "Корневой годограф" из библиотеки LinCAD и характеристическое уравнение системы из предыдущей работы, получить корневой годограф системы (рисунок 7) при изменении коэффициента an в задаваемом диапазоне (от нуля до значения, при котором корни перемещаются вправо от мнимой оси). Перемещая маркер по годографу, найти значение коэффициента, при котором все корни максимально удалены от мнимой оси. При этом и будет обеспечиваться наименьшее возможное время регулирования (наибольшее значение степени устойчивости).
Перенести корневой годограф в отчет с обозначением осей и масштаба, показать стрелками на ветвях направления движения корней при увеличении an, провести линию степени устойчивости и луч выбора корней для оценки степени колебательности. Возле точек, соответствующих наименьшему, наибольшему и выбранному значениям коэффициента an подписать значения этого коэффициента. Допускается полюс, далеко отстоящий от мнимой оси, не показывать, если это не нарушает наглядности выбора показателей качества.

Рисунок 7
Для выбранного значения an записать соответствующие ему величины времени регулирования tрег, перерегулирования и полученное значение коэффициента обратной связи kос.
5.4 Методический пример
Характеристическое уравнение системы
D(s) = s4 + 2s3 + 3s2 + 4s + (k1k2k3koc + 1) =
= s4 + 2s3 + 3s2 + 4s + 1.1 = 0;
Принимаем диапазон изменения коэффициента a4, включающего коэффициент обратной связи, в пределах граничных значений 0-2, найденных в предыдущей работе.
Таблица значений корней знаменателя ПФ
| | Значение коэффициента а4 | ||
| а4, min = 0.000 | а4, max = 2.000 | а4, опт = 0.523 | |
| полюса системы | 0.000 | -1.000 | -0.145 |
| -0.174 + j1.547 | -1.000 | -0.140 + j1.506 | |
| -0.174 - j1.547 | 0.000 + j1.414 | -0.140 - j1.506 | |
| -1.650 | 0.000 - j1.414 | -1.574 | |
Корневой годограф
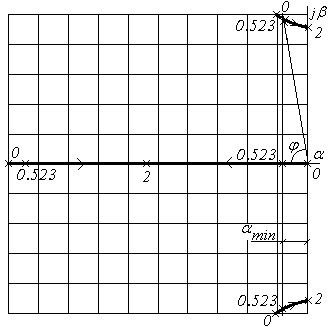
Показатели качества для выбранного значения а4 = 0.523: время регулирования tрег = 21.36 с, перерегулирование σ = 0.746 или 74.6 %.
Вычисленное значение коэффициента обратной связи
kос = (a4 – 1)/k1k2k3 = (0.523 – 1)/(0.1∙0.1∙10) = -0.477/0.1 = -4.77.
5.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, характеристическое уравнение системы, корневой годограф с осями, нанесенными ветвями и таблицей, содержащей значения всех полюсов не менее, чем для трех значений an, включая наименьшее, наибольшее и окончательно выбранное, значения выбранных времени регулирования и перерегулирования, вид зависимости коэффициента характеристического уравнения an от коэффициента kос, полученное значение kос.
К защите нужно знать все определения по корневому годографу и корневым оценкам качества регулирования, свойства корневого годографа, уметь самостоятельно определить доминирующие корни, время регулирования и перерегулирование по расположению корней на комплексной плоскости.
6 Исследование прямых оценок качества регулирования
6.1 Цель работы
Целью работы является изучение методов проектирования систем с использованием прямых показателей качества регулирования в переходном и установившемся режимах.
6.2 Общие сведения
Показатели качества, определяемые непосредственно по переходным характеристикам, называют прямыми оценками качества, а сам метод их вычисления называется прямым. Менее точные методы оценки качества называются косвенными, к ним относятся корневые, частотные и интегральные методы.
Время регулирования tрег равно времени от начала переходного процесса до момента, после которого характеристика не отклоняется от установившегося значения более, чем на величину допустимой ошибки ∆ (рисунок 8). Зону допустимой ошибки ∆=0,05·h(∞) или ∆=0,05·ε(0) откладывают с обеих сторон от линии установившегося значения. При ненулевых начальном или установившемся значениях в качестве допустимой зоны принимают 5% от разницы |h(∞)–h(0)| или |ε(∞)–ε(0)|.
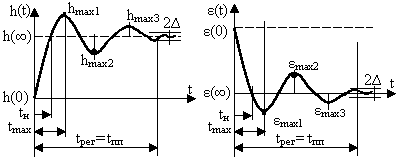
а) – выходная величина y(t) б) – ошибка регулирования ε(t)
или h(t) или отклонение δ(t)
Рисунок 8
Перерегулированием σ называется величина максимального относительного заброса переходной характеристики от начальной величины за линию установившегося значения (в относительных единицах или %)
 или
или  .
.Перерегулирование характеризует склонность системы к колебаниям, рекомендуются значения не более 15…30 %.
Время нарастания tн, характеризует скорость реакции в начальный период, определяется как:
- время от начала процесса до момента пересечения кривой с линией установившегося значения – этот метод не подходит для оценки монотонных процессов, когда характеристика приближается к установившемуся значению асимптотически в течение бесконечного интервала времени;
- промежуток времени между моментами достижения заданных уровней (например, 10 и 90 %) установившегося значения – более универсальный метод.
Очевидно, что при указании времени нарастания следует указывать, каким способом оно получено.
Время достижения первого максимума tmax (подразумевается, что первый максимум кривой является и наибольшим из всех).
Коэффициент колебательности N – число забросов переходной характеристики через линию установившегося значения за время регулирования.
Установившаяся ошибка характеризует точность системы в статическом режиме, после окончания переходного процесса. Если установившаяся ошибка ε(∞) = 0, система называется астатической, для случая ε(∞) ≠ 0 система называется статической. Статическая система всегда имеет ошибку регулирования, которую можно уменьшить, увеличивая общий коэффициент усиления системы.
6.3 Указания к работе
Предварительно для построения переходных характеристик по выходу e(t) относительно входов r(t) и f(t) необходимо рассчитать обе соответствующие передаточные функции с учетом окончательно выбранных k1 и kос (работы 4 и 5). Используется программа EILERPIC "Переходная характеристика" из библиотеки LinCAD, которая по введенным коэффициентам числителя и знаменателя передаточной функции строит отклик системы на единичный скачок от нуля до заданного момента времени (рисунок 9).
Длительность периода исследования подбирают экспериментально так, чтобы к концу периода переходный процесс заканчивался, но в то же время все параметры характеристики легко определялись. После нанесения на график вспомогательных построений и необходимых вычислений должны быть определены (с учетом масштаба) значения перерегулирования, времени регулирования, коэффициента колебательности, времен нарастания и максимума, сделана оценка – к какому виду систем (астатические, статические) относится данная система регулирования.
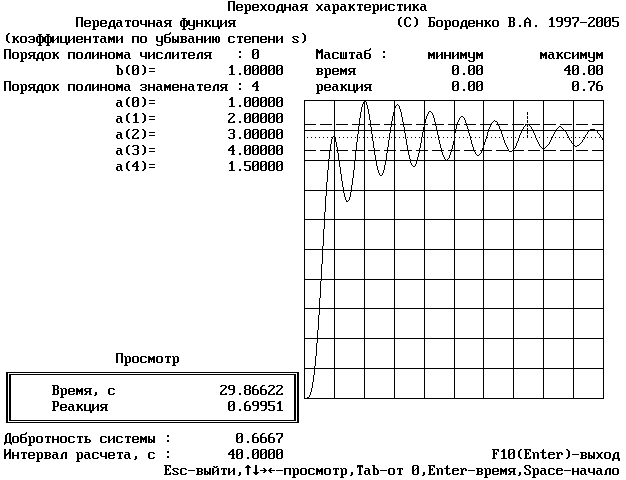
Рисунок 9
6.4 Методический пример
Передаточная функция системы по выходу e(t) относительно входа r(t) равна
 .
.Переходная характеристика ошибки регулирования εr(t)

Время регулирования при ошибке Δ=5 % или Δ = 0.05(1.912–1.0) = 0.0456 равно tрег = 21.66 с, Поскольку процесс монотонный и перебросы через линию установившегося значения отсутствуют, время нарастания определяется по диапазону 10-90 % и равно tн = 14.245 с, коэффициент колебательности N = 0, время максимума tмакс не определяется, перерегулирование равно σ = 0. Система является статической по входу r(t) и воздействию 1(t), поскольку для этих условий установившаяся ошибка εr(∞) = 1.912 ≠ 0.
6.5 Содержание отчета
Отчет по лабораторной работе должен содержать название, цель работы, передаточную функцию системы по выходу e(t) относительно входа r(t), передаточную функцию системы по выходу e(t) относительно входа f(t), обе переходные характеристики ошибки регулирования ε(t) в масштабе с необходимыми графическими построениями и найденными из каждого графика значениями прямых оценок качества, заключение о точности системы в установившемся режиме относительно данного входа и данного вида воздействия.
К защите знать существующие методы определения показателей качества регулирования, знать определения и методику графического измерения прямых оценок качества по переходной характеристике, принципы деления систем по величине установившейся ошибки.
7 Оценка запасов устойчивости системы регулирования
7.1 Цель работы
Целью работы является изучение методов определения количественных оценок запасов устойчивости системы с помощью частотного критерия устойчивости Найквиста в логарифмической форме.
7.2 Общие сведения
Логарифмические частотные характеристики (ЛЧХ) или диаграммы Боде позволяют упростить построения за счет замены реальной характеристики асимптотической; упростить расчеты за счет замены умножения коэффициентов последовательных звеньев геометрическим сложением графиков; растянуть низкочастотный диапазон исследования системы и сжать высокочастотный.
Зависимость L(ω)=20lgA(ω) от lg(ω) называется логарифмической амплитудной частотной характеристикой (ЛАЧХ) или ЛАХ.
Зависимость φ(ω) от lg(ω) называется логарифмической фазной частотной характеристикой (ЛФЧХ) или просто ЛФХ.
Используемые единицы измерения: для ЛАЧХ L(ω) – децибелы или дБ, для ЛФЧХ φ(ω) – градусы, для частоты ω, откладываемой по оси абсцисс – декады (дек). Декадой называется отрезок частот, равный изменению частоты в 10 раз.
Замкнутая система устойчива, если в момент пересечения ЛФЧХ разомкнутой системы линии -180 ее ЛАЧХ отрицательна.
Запас устойчивости замкнутой системы по амплитуде Aм, дБ, определяется в момент пересечения ЛФЧХ разомкнутой системы линии -180 градусов как абсолютное значение разницы между осью L(ω)=20lgA(ω)=0 и значением ЛАЧХ, если оно при этом отрицательно. Запас устойчивости по фазе φм, град, определяется как абсолютное значение разницы между значением -180 и значением ЛФЧХ на частоте среза. Частота среза соответствует точке пересечения ЛАЧХ с осью частот, т.е. значению L(ω)=20lgA(ω)=0.
Рекомендуемые значения запасов устойчивости: при определении по АФЧХ Ам ≥ 0.5, φм ≥ 30-60 градусов, при определении по ЛЧХ Ам ≥ 6-12 дБ, запас по фазе остается тем же.
7.3 Указания к работе
Предварительно вычисляют передаточную функцию Wраз(s) разомкнутой системы по контуру главной обратной связи при исключенном сумматоре и выбранных k1 и kос (работы 4 и 5). Если значение выбранного коэффициента обратной связи оказалось отрицательным, в числителе передаточной функции разомкнутой системы при вводе данных в компьютер следует указывать его абсолютное значение.
Для построения логарифмических характеристик используется программа BODECHAR "Логарифмические характеристики" из библиотеки LinCAD (рисунок 10).
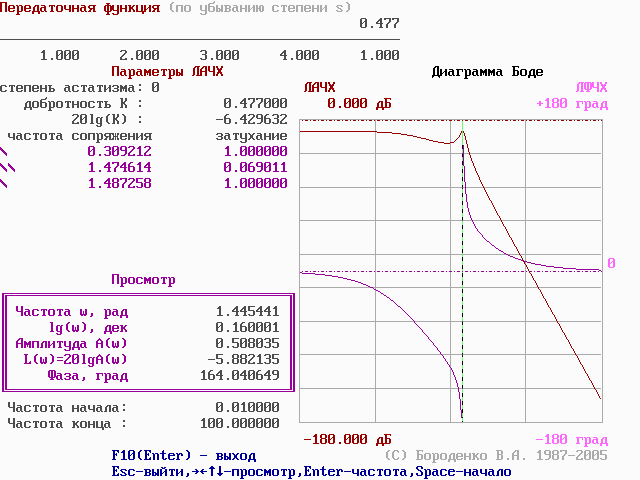
Рисунок 10
По введенным коэффициентам полиномов числителя и знаменателя передаточной функции Wраз(s) в заданном диапазоне изменения частоты программа строит графики логарифмической амплитудной (ЛАЧХ) и фазной (ЛФЧХ) частотных характеристик, которые можно просматривать, перемещая стрелками курсора указатель по рабочему полю. Начальное и конечное значения частот подбирают экспериментально, так, чтобы все изменения направления ЛАЧХ умещались на графике (можно начать подбор с частот 0.01 и 100 рад/с).
Дополнительно программа вычисляет добротность системы, порядок астатизма, частоты сопряжения, указывает кратность для комплексных сопряженных корней и направление асимптоты – вверх для корней числителя, вниз – для корней знаменателя. Эти данные могут быть использованы при самостоятельном построении ЛАЧХ.
7.4 Методический пример
Передаточная функция разомкнутой системы
Логарифмические частотные характеристики (отрицательный коэффициент числителя ПФ вводится как положительный)

Из графика запас устойчивости по амплитуде равен Ам = 0.508 или 5.882 дБ, запас устойчивости по фазе равен максимальному значению φм = 180 град, поскольку ЛАЧХ отрицательна во всем диапазоне частот, частота среза отсутствует. Значения запасов удовлетворяют стандартным требованиям к САР.
7.5 Содержание отчета
Отчет к лабораторной работе должен содержать название, цель работы, структурную схему системы с указанием точек размыкания контура обратной связи, передаточную функцию разомкнутой системы, окончательный вид ЛФЧХ и ЛАЧХ в соответствующем масштабе с необходимыми графическими построениями, найденные значения запасов устойчивости по амплитуде и фазе с учетом единиц измерения – на графике и отдельно, с указанием частот, которым соответствуют эти запасы.
К защите необходимо знать формулировки критерия Найквиста в обычном и логарифмическом виде, особенности его применения, методику построения асимптотической ЛАЧХ и расчета необходимых для этого параметров, единицы измерения ЛЧХ, нормы запасов устойчивости при их оценке по АФЧХ и ЛЧХ.