
Задание Структурная схема системы автоматического регулирования (сар) напряжения генератора постоянного тока (рисунок 1)
| Вид материала | Документы |
- Техническое задание 8 Структурная схема генератора пилообразного напряжения 9 Выбор, 143.71kb.
- Темы курсового проекта «Разработка системы автоматического регулирования скорости двигателя, 71.05kb.
- Вопросы по курсу "Теория автоматического управления", 38.97kb.
- Преобразователь измерительный активной мощности трехфазного тока эп8508, 237.92kb.
- Программа по специальности «Электромеханик», 312.34kb.
- ВП1 позволяет, 33.45kb.
- Описание регулятора напряжения рр363 автомобильного генератора, 155.91kb.
- Отчёт лабораторной работы №3. 3 по метрологии Тема, 26.53kb.
- Система оперативного постоянного тока, 35.15kb.
- Переходные процессы в линейных электрических цепях, 378.64kb.
Литература
1 Ерофеев А.А. Теория автоматического управления. – 2-е изд., перераб. и доп. – СПб. : Политехника, 2005. – 302 с.
2 Бороденко В.А. Практический курс теории линейных систем автоматического регулирования. – Павлодар : Изд-во ПГУ, 2007. – 260 с.
3 Сборник задач по теории автоматического регулирования и управления: Под ред. В.А. Бесекерского. – 5-е изд. – М.: Наука, 1978. – 512 с.
4 Электрические системы. Математические задачи электроэнергетики: Учебник для студентов вузов / Под ред. В. А. Веникова – 2-е изд., перераб. и доп. - М.: Высш. школа, 1981. - 288 с.
5 ГОСТ 2.105-95. Единая система конструкторской документации. Общие требования к текстовым документам. – Минск, ИПК Издательство стандартов, 1996.
Приложение А
(справочное)
Структурные преобразования
Для анализа или синтеза систему представляют структурной схемой, состоящей из звеньев, ветвей, узлов и сумматоров. Звено или блок обычно изображается прямоугольником, имеющим вход и выход с указанием функции преобразования внутри. Узлы (места разветвления сигнала) обозначаются на графической схеме точкой с диаметром 1,5 - 2 мм. Ветвь (связь) представляется линией со стрелкой в конце, отображающей направление движения сигнала. Сумматоры (элементы сравнения) представляют собой места схождения сигналов.
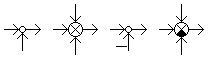 | Они обозначаются либо пустым кружком среднего размера (крупнее узла), либо крупным кружком, перечеркнутым крест накрест прямыми линиями. |
Сумматор, как правило, имеет не более трех входов, не более одного выхода и коэффициент передачи k = 1. Все входы сумматора независимы друг от друга. Если на входе сумматора производится изменение знака сигнала (инвертирование), т. е. по этому входу коэффициент сумматора равен минус единице, вход называется инвертирующим, а сумматор – элементом сравнения. Такой вход сумматора обозначается минусом для изображения в виде пустого кружка, и затушеванным сектором для обозначения в виде крупного кружка.
Обычно при известных функциях передачи отдельных звеньев требуется найти эквивалентную передаточную функцию (ПФ) объединения звеньев (объекта, регулятора), либо всей системы в целом. Для этого используют правила структурных преобразований:
1) Последовательное соединение звеньев.
Эквивалентная передаточная функция последовательно соединенных звеньев равна произведению передаточных функций этих звеньев.
2) Параллельное соединение звеньев.
Эквивалентная передаточная функция параллельно соединенных звеньев равна сумме передаточных функций этих звеньев (с учетом знака входа сумматора на пути сигнала).
3) Соединение с обратной связью (встречно-параллельное).
Эквивалентная передаточная функция соединения с обратной связью равна дроби, в числителе которой записана ПФ звена на пря учитывают его свойства:
- число ветвей корневого годографа равно степени характеристического уравнения;
- ветви комплексных частей корневого годографа симметричны относительно действительной оси;
- точки расхождения ветвей на действительной оси соответствуют Министерство образования и науки
Республики Казахстан
Павлодарский государственный университет
им. С. Торайгырова
Кафедра
Автоматизация и управление
ТЕОРИЯ ЛИНЕЙНЫХ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Лабораторный практикум
Павлодар
УДК 681.5(07)
ББК 32.965я7
Б83
Рекомендовано ученым советом института энергетики
и автоматизации ПГУ им. С. Торайгырова
Рецензенты:
Хацевский В.Ф. – доктор техн. наук, профессор,
зав. кафедрой Автоматизации и управления ПГУ
Бороденко В.А., Жантлесова А.Б.
Теория линейных систем автоматического регулирования. Лабораторный практикум. – Павлодар, Изд-во ПГУ, 2008. – 65 с.
В методических указаниях к лабораторному практикуму приводятся рекомендации по выполнению лабораторных работ, исходная схема моделируемой системы и варианты заданий, изложены последовательность выполнения работ и порядок оформления отчета. Моделирование линейных систем базируется на параллельном изучении теоретического курса линейных систем автоматического регулирования.
В качестве среды для компьютерного моделирования линейных систем используется библиотека программ LinCAD.
© Бороденко В.А., Жантлесова А.Б., 2008
© ПГУ им. С. Торайгырова, 2008
Содержание
| | Задание | 4 |
| 1 | Исследование временных характеристик фильтра | 5 |
| 2 | Исследование частотных характеристик фильтра | 8 |
| 3 | Исследование устойчивости по критерию Михайлова | 11 |
| 4 | Выбор параметров регулятора методом D-разбиения | 15 |
| 5 | Коррекция системы методом корневого годографа | 19 |
| 6 | Исследование прямых оценок качества регулирования | 23 |
| 7 | Оценка запасов устойчивости системы регулирования | 26 |
| | Литература | 29 |
| | Приложение А | 30 |