
Варшавский В. И., Поспелов Д. А
| Вид материала | Документы |
Содержание1—E сохранять их неизменными с вероятностью E So автомата. Инициирующий сигнал поступает на крайний автомат цепи А |
- Герберт Александер Саймон Исследователи ии: Лотфи Заде Исследователи ии: А. А ляпунов,, 9.34kb.
- «Как привлечь средства государственных институтов развития» Варшавский Владислав Римович, 48.54kb.
- Аннотация к научно-образовательному материалу, 114.81kb.
- 141. Поспелов В. И., Стальнов В. С. Содружественная аккомодация глаз при дисбинокулярной, 167.36kb.
- Тезисы докладов участников III международного конгресса «Россия и Польша: память империй, 1372.37kb.
- Д. А. Поспелов, Г. С. Осипов, 487.33kb.
- Варшавский А. С. Следы на дне, 1828.32kb.
- Рабочая программа учебной дисциплины Для направления 080100. 62 «Экономика» (программа, 562.39kb.
- Диспут с Пирром: прп. Максим Исповедник и христологические споры VII столетия / Отв, 73.89kb.
- Программа дисциплины: Имитационные модели для направления Прикладная математика и информатика, 120.53kb.
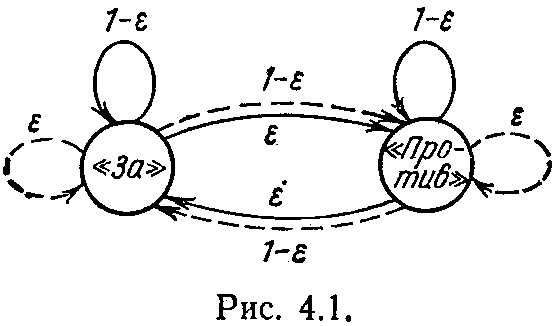
Дадим теперь формальную модель децентрализованного согласования мнений. В традициях нашего изложения она будет описана на уровне функционирования коллектива автоматов. В' качестве членов этого коллектива будут выступать специальные «упрямые» автоматы. Простейший автомат такого типа показан на рис. 4.1. (На рис. 4.1 и 4.2, как и ранее, сплошными стрелками показаны переходы автоматов при сигнале поощрения, пунктирными — при сигнале наказания.) Как мы видим, упрямый автомат является вероятностным. У него два состояния, которые соответствуют двум типам голосования («за» и «против»). Величина Эпсилон (E) характеризует степень
1
44
упрямства автомата. Если его штрафуют (например, «стыдят» его за то голосование, которого он придерживался), то он с вероятностью 1—E принимает эту критику и меняет свое мнение. С вероятностью же E он продолжает отстаивать свою точку зрения. Если же его поощряют, то из-за своего упрямства с вероятностью E автомат все же в следующий тур голосования может сменить свой выбор.
Взаимодействие между автоматами в коллективе мы организуем по следующему принципу, близкому к идее случайного взаимодействия: перед каждым туром голосования автоматы случайным образом разбиваются на тройки (общее число автоматов, участвующих в голосовании, будем для простоты считать кратным трем), в тройке с равной вероятностью выбирается один из автоматов и на его вход подается сигнал наказания, если его состояние не совпадает с состояниями двух других автоматов в данной тройке. В противном случае на его вход подается сигнал поощрения. Далее выбранный автомат с долей упрямства е производит смену своего мнения или сохраняет его. Эта операция проводится перед каждым туром голосования в новой случайно формируемой тройке и с новым случайно выбираемым автоматом в каждой тройке.
В каждой тройке происходит смена мнений (с известной долей упрямства) по принципу «как большинство, так и я». Можно строго доказать, что коллектив таких автоматов выходит на статистически устойчивую точку, подобную точке Нэша. Доля автоматов, приходящих в нее, равна доле автоматов, ее покидающих. Если в исходном коллективе в первом туре голосования большинство автоматов голосовало «за», то эта точка такова, что и абсолютное большинство автоматов будет в ней голосовать «за». Если же исходное голосование было таково, что голосующих «против» было ощутимо больше половины, то устойчивая точка будет нам демонстрировать абсолютное большинство голосующих «против». Когда в исходном состоянии доли автоматов,
145
голосующих «за» и «против», приблизительно равны, то выход в устойчивую точку будет происходить лишь при небольших значениях параметра упрямства E. Уменьшая его, можно добиться, чтобы коллектив все-таки вышел на устойчивую точку (даже один голос перевеса в начальной ситуации приведет к переходу нужной для абсолютного большинства части автоматов на это мнение).
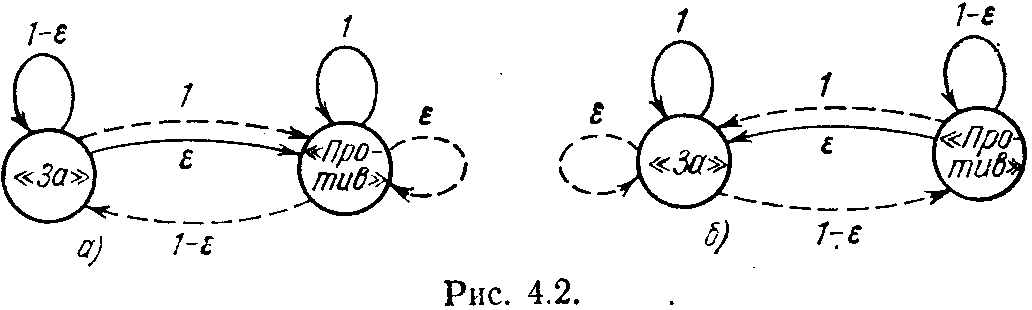
Наши упрямые автоматы были выбраны так, что они симметрично оценивали мнения «за» и «против». Психологические эксперименты, проведенные с людьми много раз, показывали, что для абсолютного большинства испытуемых этой золотой середины в выборе мнений не наблюдается. Одни более склонны принимать положительные альтернативы, голосуя «за», другие более склонны голосовать «против». Такую несимметричность легко привнести и в наши автоматы. Рис. 4.2 демонстрирует, как это можно
сделать. На рис. 4.2, а показана диаграмма смены состояний для упрямого автомата, предпочитающего голосовать «против», а на рис. 4.2, б — для любителя голосовать «за». В коллективе такие несимметричные автоматы ведут себя аналогично симметричным. Их однородные совокупности выходят на такие же устойчивые точки, как и однородный коллектив из симметричных автоматов. Только скорость сходимости к ним будет несколько иной.
Естественно обсудить и модель неоднородного коллектива. Можно изучить два вида неоднородности. Во-первых, можно рассмотреть совокупность симметричных и несимметричных автоматов двух типов. Эксперимент на ЭВМ показал, что такой коллектив ведет себя подобно однородному. Обе устойчивые точки достигаются им успешно. Во-вторых, можно рассмотреть коллектив, в котором автоматы различаются по степени своего упрямства. Параметр
1
46
у

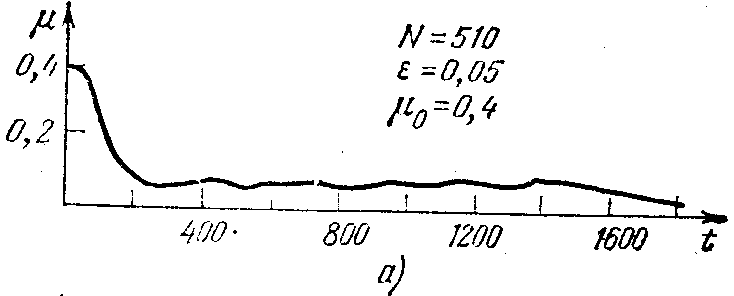
прямства для некоторого фиксированного автомата может принимать значения из множества {E1,E2, ..., En}. Но, как показывает эксперимент, и такой коллектив выходит либо на устойчивую точку, где абсолютное большинство голосует «за», либо на аналогичную точку, где абсолютное большинство голосует «против». На рис. 4.3 приведены типовые кривые, получаемые в результате моделирования. По оси абсцисс на этом рисунке отложены такты моделирования t (туры голосования), а по оси ординат Мю — доля автоматов в коллективе из N автоматов, которая голосует «против» (Мю0 — начальная доля таких автоматов). На рис. 4.3, а и 4.3,6 рассмотрен однородный коллектив с разным числом автоматов в коллективе и разным начальным предпочтением в коллективе голосующих. На рис. 4.3, в
147
п
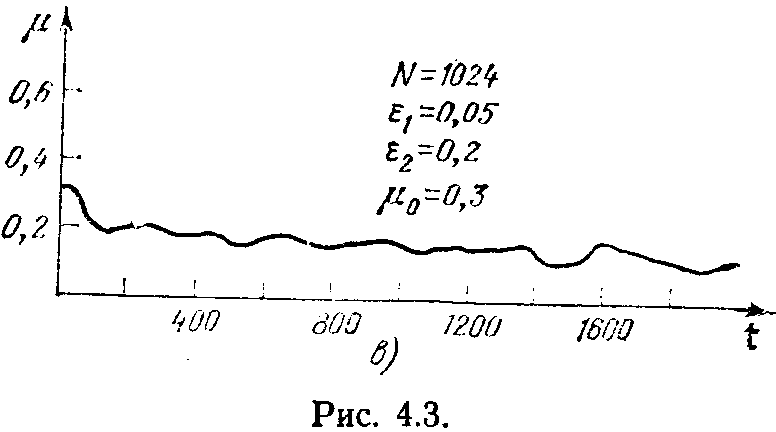
оказан процесс моделирования для неоднородного коллектива, в котором имеется два типа автоматов, отличающихся по параметру своего упрямства.
Интересно отметить, что в отсутствие перемешивания в коллективе автоматов (например, при фиксации для каждого автомата множества его возможных соседей) эффект, который мы наблюдаем на рис. 4.3, становится недостижим. Это еще раз подчеркивает важность процедуры случайных взаимодействий в «жизни» автоматных коллективов.
Выше мы рассмотрели простейшую модель голосования. Теперь от нее мы сможем перейти к модели, которая напомнит нам трудное заседание жилищной комиссии или парадокс «темной лошадки» Лошадкина при отборе работ на конкурсе. Наш коллектив, как и ранее, будет состоять из упрямых симметричных автоматов. Но теперь число состояний каждого автомата равно К, где К — число ранжируемых объектов. Если мы вспомним наш пример с конкурсной комиссией из § 4.5, то там К=7 и каждый упрямый автомат, моделирующий некоторого члена конкурсной комиссии, должен иметь 7! состояний. Каждое состояние автомата есть некоторая фиксированная ранжировка объектов.
Предположим, что перед каждым туром голосования происходит случайное разбиение коллектива автоматов на пары (т. е. осуществляется случайное парное взаимодействие). Если в коллективе нечетное число автоматов, то автомат, не вошедший в пару, в очередном туре голосования сохраняет свои предшествующие предпочтения. Для каждой пары вычисляется значение рассогласованности предпочтений тех автоматов, которые попали в пару. Меру этой рассогласованности ро можно подсчитать следующим образом. Пусть имеются два предпочтения (И, П, С, Л, К, М, Сб) и (Сб, И, М, Л, К, С, П). Б качестве объектов взяты претенденты на премии из примера § 4.5, а фамилии заменены первыми их буквами. Берем первый элемент из первой шкалы И и смотрим на каком месте он стоит во второй шкале. Во второй шкале он стоит на втором месте. Разность мест равна 1. Далее возьмем второй элемент первой шкалы П и снова смотрим, "на каком месте он находится во второй шкале. В нашем случае он стоит на седьмом месте. Разность мест равна 5. Повторяем
148
этот процесс для всех элементов шкалы и суммируем получившиеся разности. Эта сумма и есть мера рассогласованности двух шкал. В нашем примере ро=1+5+3+0+0+3+6=18.
П
усть произведено разбиение множества автоматов с их предпочтениями на N/2 пар (N — общее число автоматов в коллективе, если N—четно, либо число автоматов в коллективе без одного, если N—нечетно). Для каждой пары подсчитывается мера рассогласованности. Сумма этих мер, деленная на N/2, определяет R—меру рассогласованности мнений по коллективу автоматов. Именно она характеризует успешность или неуспешность коллективного голосования. Если R=0, где R—мера рассогласованности по коллективу, то это означает, что у всех автоматов коллектива, состоящего из четного числа членов, все мнения полностью совпали.
Пусть в паре автоматов равновероятно выбирается один из них, который будет изменять свои предпочтения с вероятностью 1—E сохранять их неизменными с вероятностью E. Как будет организовано изменение предпочтений? Автомат выделяет в мере рассогласованности тот элемент, который вносит в нее максимальное рассогласование. В том примере, который мы только что рассмотрели, таким элементом является Собакин. Его вклад в рассогласование, равный 6 единицам, самый большой. Тогда с вероятностью 1—E выбранный в паре автомат может переставить Собакина на несколько позиций так, чтобы рассогласование уменьшилось. Наиболее прост случай, когда перемещение происходит на соседнюю позицию. Тогда, если изменения производит второй автомат в паре, то ранжировка (Сб, И, М, Л, К, С, П) превращается в ранжировку (И, Сб, М, Л, К, С, П). Но можно осуществить перестановку и на большее число позиций. Число позиций, на которое перемещается элемент, вносящий максимальное рассогласование в ранжировки автоматов пары, можно назвать степенью «конформизма» автомата. После изменения предпочтений (или сохранения старых в тех парах, где проявилось упрямство) наступает новый тур голосования и образование в коллективе новых случайных пар.
Моделирование на ЭВМ описанного процесса при различном числе автоматов, различном числе ранжи-
149
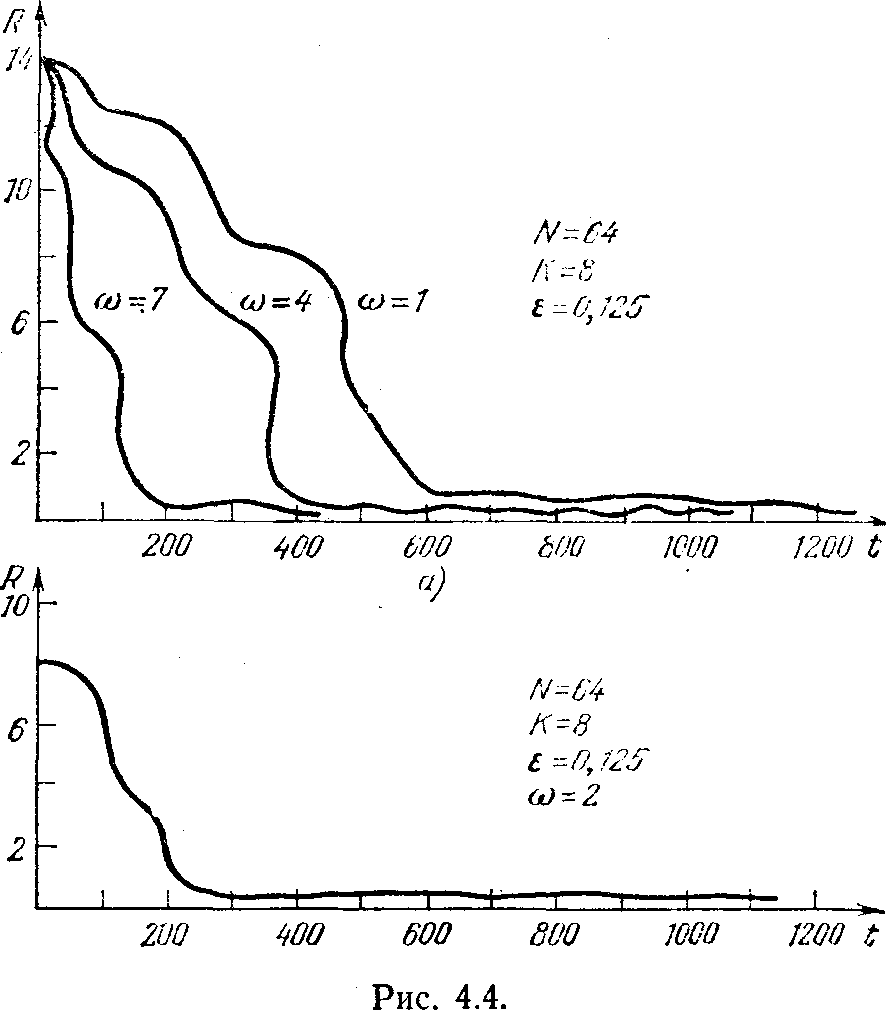
руемых элементов, различных, значениях параметра упрямства автоматов и степени конформизма показало, что имеется явная тенденция сходимости процесса к некоторому единому мнению. На рис. 4.4 показаны типичные результаты моделирования. По оси абсцисс отложены такты моделирования t (туры голосования), а по оси ординат—значения R. На рис. 4.4,а показано поведение коллектива автоматов при различных степенях конформизма Омега. Видно, что увеличение степени конформизма приводит к ускорению сходимости. В начальный момент мнения автоматов в коллективе равномерно распределены по допустимым ранжировкам. На рис. 4.4,6 показан процесс сходимости в том случае, когда в начальной ситуации мнения автоматов не «размазаны» равномерно по всем возможным ранжировкам, а имеют вид нормального усеченного распределения на них. Этот случай ближе к реальности, чем предыдущий, так как в коллективе голосующих, как правило, уже перед первым туром наблюдается некоторое согласо-
150
ванное «общее мнение», по крайней мере относительно определенных претендентов. Как видно из рис. 4.4, скорость сходимости мнений экспертов при наличии предварительного общего мнения увеличивается.
Отметим, что модели голосования, которые мы рассмотрели, могут интерпретироваться в самых неожиданных областях. Например, модель простейшего голосования «за» и «против» в коллективе автоматов тесно связана с созданием живучих технических систем, в которых элементы способны к самовосстановлению. К этому мы еще вернемся в гл. 5.
Г л а в а 5. КОЛЛЕКТИВ ВО ВРЕМЕНИ
«Время уже оделось в числа»,
Луис де Гонгора
§ 5.1. Что такое синхронизация?
Уже довольно давно биологи, которые занимались культурами тканей, т. е. выращиванием живых клеток вне организма, обратили внимание на синхронизацию моментов деления клеток. Явление заключалось в следующем. Клетка делится. Две вновь образовавшиеся клетки некоторое время находятся в состоянии покоя, а затем одновременно делятся. Тот же эффект повторяется для четырех вновь образовавшихся клеток и т. д. Возможны следующие механизмы, обеспечивающие синхронизацию делений. Во-первых, в каждой клетке могут существовать достаточно точные внутренние часы, которые определяют интервалы между делениями клетки. Во-вторых, клетки могут согласовывать друг с другом моменты своих делений. До сих пор ни одна из этих гипотез не нашла точного экспериментального подтверждения. Первая гипотеза достаточно правдоподобна; если такие часы действительно существуют, то механизм синхронизации очевиден. Для обеспечения механизма согласования необходим обмен информацией между клетками. Существует возможность достаточно быстрого обмена сигналами, например при помощи биополя, но наличие такого биополя до сих пор нельзя считать экспериментально доказанным. Скорости же распространения электрохимических процессов, по-видимому, не могут обеспечить наблюдаемой точности синхронизации достаточно больших популяций клеток. Последнее определило интерес биологов только к двум гипотезам, объясняющим механизм синхронизации — наличие биополя и внутренних часов. Существование биополя оставалось под большим сомнением, а внутренние часы могли объяснить только процесс синхронного независимого деления и также требовали рассмотрения механизмов взаимодействия, если включение процесса деления
152
инициируется каким-либо внешним для популяции клеток сигналом, воспринимаемым ограниченным числом клеток.
Описанный, но необъясненный эффект, возникающий в изучаемом объекте, вещь неприятная, но не смертельная. Однако, как только ученые начали заниматься моделями самовоспроизведения, вопрос о механизмах, обеспечивающих одновременное включение разных частей самовоспроизводящейся машины, встал уже не перед биологами, а перед инженерами и математиками. Здесь, правда, вроде бы не было технической сложности — можно было иметь в системе общие, достаточно точные часы и одновременно сообщать всем частям системы текущее время. Такой способ временного согласования поведения частей системы называется в технике синхронизацией. Однако идея синхронизации общих часов казалась далекой от биологических прототипов и американский ученый Дж. Майхилл сформулировал свою знаменитую задачу, которая носит название «задачи о цепи стрелков». Задача Майхилла состоит в следующем:
Имеется цепь стрелков (рис. 5.1), каждый из которых может общаться только с двумя своими не

посредственными соседями. Цепь состоит из конечного числа стрелков, два крайних стрелка имеют только по одному соседу. Один из крайних стрелков получает команду, после чего стрелки должны договориться и одновременно произвести выстрел. Существуют ли правила поведения стрелков, обеспечивающие решение этой задачи, если количество слов, которыми могут обмениваться стрелки и объем внутренней памяти каждого из них ограничены и не зависят от длины цепи?
Положительный ответ на вопрос о существовании решения задачи Майхилла означает, что есть возможность синхронизации совокупности сколь угодно большого числа объектов ограниченной сложности за счет организации взаимодействия между ними при сколь угодно медленных процессах обмена сигналами.
153
Существование решения задачи Майхилла было доказано Дж. Мак-Карти и М. Минским, а в 1962 г. Э. Гото опубликовал решение задачи с минимально возможным временем решения, равным 2N—2, где N — число стрелков. При этом алгоритм поведения каждого стрелка представлялся конечным автоматом с несколькими тысячами внутренних состояний. Следующий принципиальный шаг был сделан советским ученым В. И. Левенштейном, опубликовавшим в 1965 г. блестящее решение задачи, в которой используется автомат, имеющий всего девять внутренних состояний. Усилиями последующих исследователей число состояний удалось уменьшить до восьми.
Хотя решение задачи Майхилла давало ответ па принципиальный методологический вопрос и демонстрировало ряд эффектов, которых мы коснемся в следующем параграфе, многие относились к полученным конструкциям скептически: «Зачем городить все эти сложности, если можно протянуть провод между всеми стрелками и одновременно для всех включить лампочку, являющуюся командой стрелять?»
До последнего времени возражать таким скептикам было трудно. Принцип внешней синхронизации прекрасно обеспечивал решение огромного числа технических задач. Однако постепенно начали накапливаться представления, связанные с трудностями использования общей синхронизации в системах высокой сложности. Положение драматизировалось с появлением субмикронных интегральных схем. Дело в том, что если размер транзисторного перехода в кристалле меньше микрона, то задержки в соединительных проводах становятся более существенными, чем время переключения транзистора, и мы опять попадаем в ситуацию, когда обмен информацией между объектами оказывается относительно медленным. В обиход начал входить термин — эквихронная зона, т. е. зона кристалла, в которой можно считать, что время течет одинаково. Для обеспечения же синхронизации процессов, протекающих в различных эквихронных зонах, требуется организация специального взаимодействия между зонами.
Существуют разные подходы к решению этой задачи. Здесь мы остановимся на решении, связанном с задачей Майхилла.
154
§ 5.2. Управление стрелками
Сформулируем задачу Майхилла в терминах автоматов, моделирующих поведение стрелков.
И

меется цепь из N автоматов. Каждый автомат имеет п внутренних состояний. Состояние каждого автомата в следующий момент времени зависит от его состояния в текущий момент времени и состояний двух его соседей, правого и левого. В начальный момент все автоматы находятся в некотором начальном состоянии Sо. В начальный момент па один из край-них автоматов цепи подается внешний сигнал, выводящий его из начального состояния. Существует ли такая конструкция автомата (правила смены его состоянии), что после инициации крайнего автомата цепи через некоторое время все автоматы одновременно перейдут в одно и то же состояние S и ни один из них не перейдет в это состояние ни в один из предыдущих моментов, причем сложность каждого автомата п не зависит от длины цепи.
Рассмотрим возможный алгоритм взаимодействия автоматов, обеспечивающий решение указанной задачи. На рис. 5.2 изображена временная диаграмма поведения цепи из девяти автоматов. Каждому автомату соответствует вертикальная
линия. Тонкая линия обозначает начальное состояние So автомата. Инициирующий сигнал поступает на крайний автомат цепи А9 и переводит его в состояние, которое мы будем называть состоянием готовности S1. Перейдя в это состояние, автомат посылает в цепь два сигнала а1 и a3, распространяющиеся по цепи со скоростями 1 и Уз соответственно. Распространение сигнала по цепи со скоростью 1 означает, что автомат, получивший справа сигнал а1, передает его в том же направлении в следующем такте работы, а при скорости распространения 1/3 задерживает сигнал а3 на три такта.
155
Сигнал a1, дойдя до противоположного края цепи, переводит крайний автомат в состояние готовности Si и отражается от края цепи, начиная распространение в обратном направлении (слева направо). Нетрудно понять, что отраженный сигнал а1 и сигнал а3 встретятся точно в середине цепи. Находящийся в точке встречи автомат A5 (или два автомата в случае их четного числа) переходит в состояние готовности Si, которому на рис. 5.2 соответствует жирная черта.
Автомат A5, перешедший теперь в состояние S1, посылает в обе стороны по паре сигналов a1 и a3, причем сигнал a1 отражается от первого встреченного им автомата в состоянии S1. В результате в точках встречи отраженных сигналов с сигналом из (А3 и A7) происходит переход автомата в состояние S1 и наступает новая генерация сигналов a1 и a3 в обе стороны.
Т
аким образом, в каждом цикле происходит деление интервала между двумя автоматами, находящимися в состоянии S1 пополам, и в центре этого интервала автомат тоже переходит в состояние S1. Такой процесс продолжается до тех пор, пока все автоматы цепи не перейдут в состояние S1. Обратим внимание на то, что до последнего деления у каждого автомата будет по крайней мере один сосед, который не готов к синхронизации, т. е. находится в состоянии, отличном от S1. Автомат переходит в состояние синхронизации S, если он сам и оба его соседа находятся в состоянии S1. Таким образом, задача синхронизации решается и правила поведения каждого автомата не зависят от длины цепи. Время, необходимое для решения задачи деления интервала пополам, равно 3/2 его длины, и, следовательно, общее время синхронизации с точностью до постоянных, зависящих от четности и нечетности интервалов, равно утроенной длине цепи.
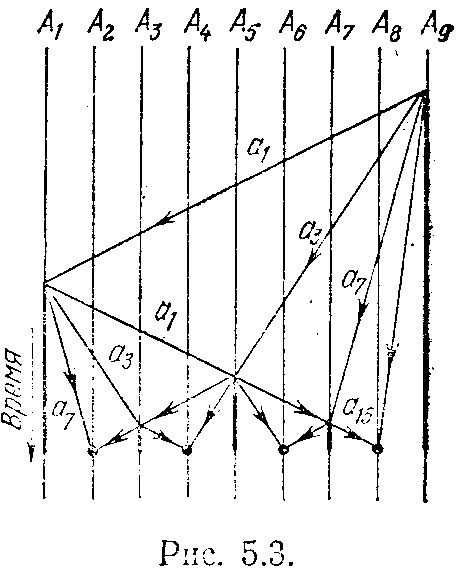
Процесс синхронизации можно ускорить, если автомат, перешедший в состояние готовности, посылает еще сигнал а7, распространяющийся со скоростью 1/7, и сигнал а15, распространяющийся со скоростью 1/15 (рис. 5.3). Причины, приводящие к ускорению процесса синхронизации в такой ситуации, очевидны из сравнения рис. 5.2 и 5.3. Хотя и в этом случае правила локального поведения не
156
зависят от длины цепи, но сложность автоматов возрастает.
Для того чтобы отдельно взятый автомат мог осуществить задержку сигнала на Т тактов, необходимо, чтобы он имел не менее Т внутренних состояний. Если он одновременно должен задерживать один сигнал на Т1 тактов, а другой сигнал на Т2 тактов, то число его состояний должно быть не меньше, чем T1T2. Таким образом, введение дополнительных сигналов, ускоряющих синхронизацию, ведет к существенному росту сложности автоматов. Кроме того, теперь необходимое число сигналов, а следовательно, и сложность автоматов начинает зависеть от длины цепи.
В предыдущем параграфе мы уже упоминали о блестящем решении задачи синхронизации В. И. Левенштейном. Необычайное изящество этого решения состоит в том, что он нашел способ организовать взаимодействие между автоматами так, что в процессе взаимодействия между соседними автоматами осуществляется задержка распространения сигналов на число тактов, равное 1, 3, 7, 15, ..., (2k—1), причем k зависит не от числа состояний автомата, а от длины цепи. Решающие эту задачу автоматы имели всего девять внутренних состояний. Сейчас известно решение для восьми внутренних состоянии. В этом случае время синхронизации достигает своего минимального значения, равного удвоенной длине цепи, т. е. времени, необходимого для того, чтобы сигнал, распространяющийся со скоростью 1, прошел всю цепь туда и обратно.
Методологически принципиально в этом решении то, что за счет взаимодействия каждый автомат решает локальную задачу, сложность которой такова, что без взаимодействия сам автомат не может се решить и, более того, с ростом числа автоматов при сохранении ограниченности взаимодействия
157
только двумя соседями растет сложность решаемых локальных задач.
Появление решения задачи Майхилла породило несколько дополнительных интересных проблем. Прежде всего была решена задача синхронизации цепи автоматов для случая инициации произвольного автомата цепи. Сложность локального автомата при этом возросла до 10 состояний.
Следующий вопрос, возникший при развитии моделей этого типа,— вопрос о возможности синхронизации двух автоматов, между которыми включена неизвестная им задержка, причем сложность автоматов не должна зависеть от величины задержки. Последнее требование исключает возможность использования простого алгоритма, сводящегося к нахождению временного интервала между посылкой сигнала и возвращением отраженного сигнала обратно. Использование указанного алгоритма невозможно и в случае, если задержка изменяется во времени — например, в такой полуфантастической ситуации, когда мы хотим синхронизовать события на Земле и удаляющемся от нее космическом корабле. В этой ситуации мы должны синхронизовать систему, посылая друг другу сигналы синхронизации в один и тот же момент. Возникает вопрос о существовании алгоритма выхода на синхронный режим за счет локального поведения командного комплекса на Земле и систем космического корабля. В рамках рассматриваемых автоматных моделей решение оказалось достаточно простым и обеспечивается автоматами, имеющими 12 внутренних состоянии.
Идея алгоритма, осуществляющего синхронизацию с точностью до такта автомата, достаточно проста и состоит в следующем. Инициирующей синхронизацию автомат посылает в канал связи в три последовательных момента времени три сигнала a1, a2 и a3. Приемник отправляет эти сигналы обратно, задержав сигнал а1, на один такт, сигнал a2 на два такта и сигнал a3, на три такта. Одновременный прием одним из участников обмена сигналов a1 и a3 означает выход на синхронный режим, и с этого момента он начинает посылать в канал синхросигнал s. В момент совпадения у одного из участников сигналов a1 и a3 другой участник получает сигнал a2, который отправляет обратно с за-
158
держкой в два такта. После выхода на синхронный режим сигнал a2 не отличим от сигнала s, и если последний возвращается участником с задержкой в два такта, то обмен сигналами s начинает поддерживать взаимную синхронизацию. Для исключения влияния неточности локальных часов, определяющих локальное время на Земле и космическом корабле, обмен сигналами a1 и a2 должен продолжаться и после выхода на синхронный режим.
Т
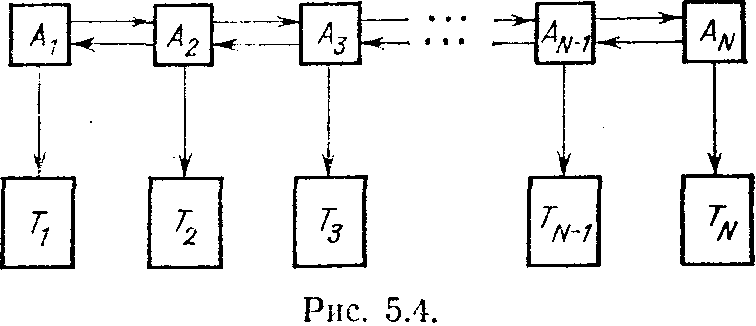
еперь рассмотрим ситуацию, в которой майхилловские стрелки не стреляют из ружей, а включают какие-то устройства (рис. 5.4), каждое из которых обладает своим латентным временем, т. е. временем между нажатием пусковой кнопки и началом работы устройства. Например, от момента включения питания радиолокационной станции до момента разогрева радиоламп проходит 1 мин, а от момента запуска двигателя до его прогрева — 5 мин. Каждому «стрелку» известно только латентное время своего собственного устройства. Возникает вопрос о существовании локальных правил поведения автоматов, сложность которых (число состояний) не зависит ни от длины цепи, ни от латентных времен других «стрелков», иными словами, после подачи команды одному из «стрелков» цепи они должны нажать пусковые кнопки так, чтобы все управляемые ими устройства начали работать одновременно.
Оказалось, что эта задача имеет решение, базирующееся на принципах решения исходной задачи Майхилла и локальный автомат представляет собой цепочку из Tk автоматов, решающих задачу Майхилла, где Tk — локальное латентное время, и логической схемы, вырабатывающей стартовый сигнал в зависимости от состояний автоматов указанной цепочки.
159
Коль скоро мы рассматриваем алгоритмы локального ограниченного взаимодействия, то естественно задуматься о влиянии на решение задачи числа соседей. При изучении этого вопроса оказалось, что решение задачи синхронизации не на отрезке, а на произвольном графе, приблизительно так же сложно. С другой стороны, возникает вопрос, а может ли быть решена задача синхронизации не при двух, а только при одном соседе? Ответ на этот вопрос положителен. Любая задача, которую можно решить на отрезке с двумя соседями, можно решить на кольце с одним соседом.