
Источник меняющегося магнитного поля и. С. Кравченко1, А. Ю. Митягин2, М. В. Фесенко1, Б. В. Хлопов 1
| Вид материала | Документы |
- Неоднородный полупроводниковый носитель информации в переменном магнитном поле, 107.68kb.
- Задание 1 Цель: оценить значение сердечника для получения магнитного поля катушки, 33.68kb.
- Дефицит магнитного поля, 27.98kb.
- Устойчивость состояний тонкопленочных слоев магнитных носителей к внешним импульсным, 96.67kb.
- Домашнее задание по физике на 4 сессию Учебник, 55.57kb.
- Задачи урока: -обучения: продолжить формирование представлений о магнитном поле; рассмотреть, 35.34kb.
- Урок на тему «Магнитное поле Земли», 31.68kb.
- Лабораторная работа № Исследование магнитного поля модели сверхпроводникового индуктора, 75.13kb.
- Разработка урока в 8-м классе "Магнитное поле. Линии магнитного поля", 33.77kb.
- Магнитное поле. Сила Ампера. Сила Лоренца. Явление электромагнитной индукции, 98.2kb.
ИСТОЧНИК МЕНЯЮЩЕГОСЯ МАГНИТНОГО ПОЛЯ
И.С. Кравченко1, А.Ю. Митягин2, М.В. Фесенко1, Б.В. Хлопов 1
1ФГУП «ЦНИРТИ им. академика А.И.Берга», Россия
105066, Москва, ул. Новая Басманная, 20, 208_otd@mail.ru
2Институт Радиотехники и Электроники РАН, Россия
103907, Моховая ул., д. 11, корп. 7, lap@promtechn.ru
Описание фигур и обозначений.
На фиг. 1 представлена блок схема устройства стирания записанной информации.
На фиг. 2 представлена электрическая схема устройства стирания записанной информации.
На фиг. 3 приведены импульсы управления.
На фиг. 4 приведена полеобразующая система.
На фиг. 5 приведены варианты намотки.
На фиг. 6 приведены графики составляющих полей в полости полеобразующей системы.
На фигурах введены обозначения:
1 – источник постоянного тока; 2 – устройство включения; 3 – делитель тока; 4 – устройство демпфирования; 5 – накопитель энергии; 6 – устройство коммутации; 7 – полеобразующая система; 8 – устройство управления;
9 – четырех проводной кабель; 10 – четырех контактный соединитель (коннектор); 11 – генератор импульсов; 12 – устройство запуска; 13 – делитель; 14 – микропроцессор; 15 – программируемая линия задержки; 16 – контроллер шины USB; 17, 18, 19, 20 – демпфирующие диоды; 21, 22, 23,
24 – конденсаторы; 25, 26, 27, 28 – тиристоры; 29, 30, 31, 32 – соленоиды;
33 – флэш-память; 34 – каркас; 35 – шина с наконечником.
Устройство в своем составе содержит (рисунок 1): источник постоянного тока (ИПТ1), устройство включения (УВ2), делитель тока (ДТ3), устройство демпфирования (УД4), накопитель энергии (НЭ5), устройство коммутации (УК6), полеобразующую систему (ПОС7), устройство управления (УУ8), четырех проводной кабель 9, четырех контактный соединитель (коннектор) 10.
Рис. 1
Полеобразующая система имеет четыре входа питания (1, 2, 3, 4) и один общий выход питания (5), подключенный к минусовому контакту (ИПТ1) через шину (35), четыре соленоида с полостями внутри, выполненными в виде параллепипеда, на диэлектрическом каркасе. Обмотки имеют по два вывода. Собираются соленоиды в системе по принципу «матрешки» (рисунок 2) соосно.
Рисунок 2.
Намотка катушек соленоидов (29, 31) косоугольная с правым или левым углом намотки. Угол косоугольной намотки относительно продольной оси полости соленоида (рисунок 3а) находится в пределах от 0º до 90º и от 90º до 180º. Предпочтительные углы 45º и 135º. Намотка катушек соленоидов (30, 32) зигзагообразная с левым и правым углами намотки на противоположных сторонах параллепипеда с равными противоположно лежащими углами. Углы зигзагообразной намотки находятся в пределах от 0º до 180º. Предпочтительные углы ± 30º (рисунок 3б).
а)
б)
Рис. 3
Источник меняющегося магнитного поля работает следующим образом: создает управляемое импульсное магнитное поле, многократно изменяющееся в ограниченном пространстве в полости каркаса полеобразующей системы во времени, по амплитуде и по направлению вектора напряженности. Для этого с источника постоянного тока постоянный ток поступает на вход устройства управления и устройства включения, коммутирующее устройство которого находится в нормально закрытом положении, затем через делитель тока, где он делится и течет по двум цепям с разными уменьшенными значениями токов. По цепи, соединяющей с устройством управления, ток течет со значением, не превышающим миллиамперы, а по цепи, соединяющей устройство демпфирования, не более 3А.
Рис. 4
Ток, поступающий на вход устройства демпфирования, запитывает одновременно четыре диода (17, 18, 19 и 20), через которые заряжаются конденсаторы (21, 22, 23, 24) накопителя энергии до значения напряжения равного напряжению заряда U3 (рис. 4). В это время ток питания поступает на входы (1 и 2) устройства управления, которые создают напряжение питания на входе генератора импульсов и делителя. Поступающее напряжение питания на вход ГИ обеспечивает на выходах (2 и 3) генератора импульсов последовательность прямоугольных импульсных сигналов с периодом следования Т2 = t1׀ – t1, длительностью τn = tn – t1 и амплитудой, равной Uс сигнала (рис. 4б), достаточной для запуска программируемой линии задержки (ПЛЗ), поступающей с выхода устройства запуска, в котором он формируется (рис. 4в) в управляющий сигнал, имеющий форму продифференцируемого сигнала.
Микропроцессор (МП), на вход (2) которого поступают сигналы запуска от генератора импульсов прямоугольной формы (рис. 4б), в соответствии с алгоритмом зашитой в него программы по шине 3 и по шине 4 выдает сигналы команды в соответствии с установленными протоколами (формулярами).
Команды, поступающие с микропроцессора по шине 3 на вход (2) программируемой линии задержки на управляющих выходах (3, 4, 5, 6) создают управляющие сигналы Иу, которые (рис. 4г) в определенной последовательности или попарно (рис 4ж) или вместе подключают в устройстве коммутации коммутирующие тиристоры (25, 26, 27, 28).
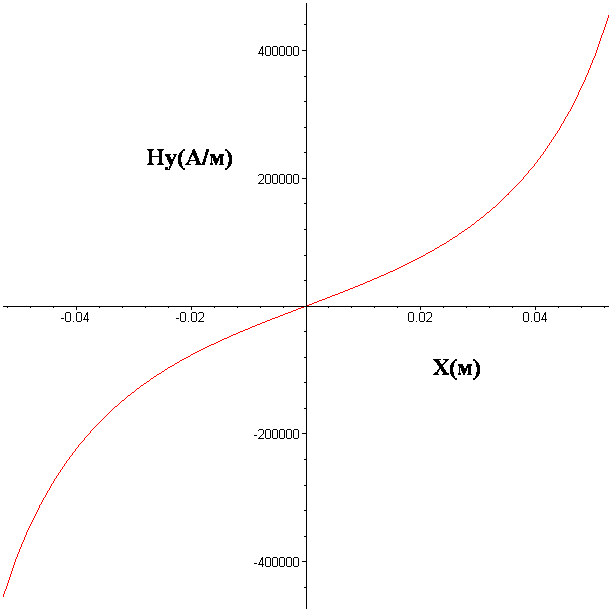
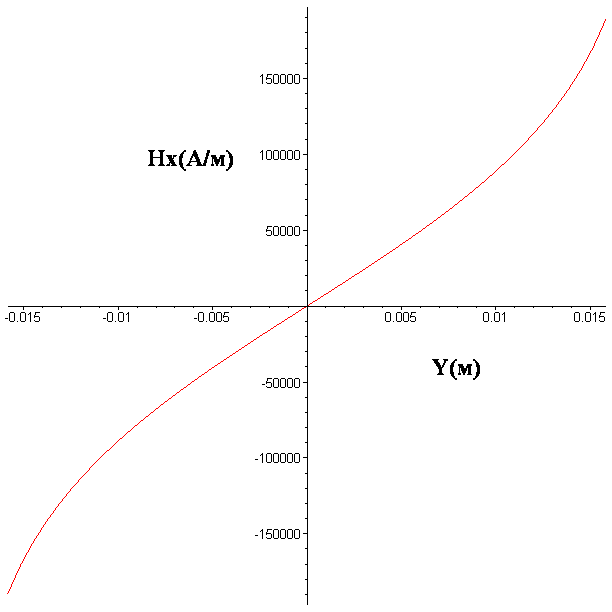
Конденсаторы (21, 22, 23, 24) накопительного устройства в зависимости от подключенного тиристора (25, 26, 27, 28) разряжаются в полеобразующей системе на соответствующих соленоидах (29, 30, 31, 32), подключенных к конденсаторам (рис. 4д, 4з). В полости полеобразующей системы, при протекании импульсных токов большого значения в соленоидах (29, 30, 31, 32), формируется импульсное магнитное поле, которое суммируется в ПОС (рис. 3е, 3и). Создается импульсное магнитное поле с векторами напряженности под углами , β, σ. Углы в зависимости от косоугольной намотки, правой или левой, и вида подключения, синфазного или противофазного, принимают значение и 180º + или 1 и 180º – . Распределение магнитного поля внутри полости соленоида с зигзагообразной намоткой представлено на рисунке 5. На рисунке 5а изображено распределение Z составляющей поля при перемещении по оси X (от одной боковой стенки к другой). На рисунке 5б – распределение Y составляющей поля при перемещении по оси X (от одной боковой стенки к другой). На рисунке 5в – распределение Z составляющей поля при перемещении по оси Y (от нижней стенки к верхней). На рисунке 5г – распределение X составляющей поля при перемещении по оси Y (от нижней стенки к верхней).

| а) | б) |

| в) | г) |
Рис. 5
При зигзагообразной намотке углы β изменяются в пространстве полости полеобразующей системы при наблюдении из точек, размещаемых перпендикулярно продольной оси полости при правом направлении намотки с правой стороны от оси изменяются по часовой стрелке, принимая одновременно угол σ, который между горизонтальной плоскостью и направлением вектора напряженности, описывая дугу. При этой же намотке углы β изменяются в пространстве полости полеобразующей системы при горизонтальном срезе по центру и при наблюдении из точек, размещаемых перпендикулярно продольной оси полости при правом направлении намотки с левой стороны от оси одновременно с правой стороной изменяются, принимая одновременно угол σ между горизонтальной плоскостью и направлением вектора напряженности. Амплитудное значение напряженности импульсного магнитного поля в каждой точке наблюдения меняется и приобретает свое значение от 0 до Hmax.и.
Углы β при зигзагообразной намотке с левым направлением при рассмотрении из точек, размещаемых на том же срезе пространства полости полеобразующей системы, размещаемых на перпендикуляре к продольной оси полости с правой стороны от оси изменяются против часовой стрелки, принимая одновременно угол σ между горизонтальной плоскостью и направлением вектора напряженности, описывая дугу. При этом же направлении намотки на левой стороне от оси угол β по часовой стрелке от 0º до 60º, принимая одновременно угол σ от 0º до - 30º градусов.