
Нформаційні системи І моделювання
| Вид материала | Документы |
СодержаниеЦелью работы |
- Нформаційні системи І моделювання, 61.42kb.
- Нформаційні системи І моделювання, 135.57kb.
- Нформаційні системи І моделювання, 107.78kb.
- Нформаційні системи І моделювання, 93.99kb.
- Нформаційні системи І моделювання, 103.77kb.
- Іhформаційhі процеси в суспільстві. Іhформаційhі системи. Штучний інтелект. Експертні, 155.22kb.
- Конспект лекцій з дисципліни "Інформаційні системи та технології у фінансових установах", 1112.81kb.
- На державний iспит з циклу професійної підготовки та спеціальних курсів, 134.32kb.
- Иємства та сформувати комплекс захисних реакцій, спрямований на забезпечення стійкого, 175.84kb.
- 1 опис засобів моделювання складних динамічних систем, 175.64kb.
ІНФОРМАЦІЙНІ СИСТЕМИ І МОДЕЛЮВАННЯ
УДК 621.318
ЦИФРОВОЕ МОДЕЛИРОВАНИЕ СИСТЕМ СИНХРОННОГО ВРАЩЕНИЯ
С АСИНХРОННЫМИ МАШИНАМИ
Макурин А.В., Шевченко И.С., Самчелеев Ю.П., Калюжный В.В.
Донбасский государственный технический университет
Введение. Системы синхронного вращения (ССВ) находят применение в различных отраслях промышленности. Часто их использование необходимо по техническим причинам там, где применение механических связей не дает необходимой жесткости или невозможно конструктивно. В ряде случаев применение ССВ необходимо для снижения нагрузок на механизмы, иногда рассогласование валов или перекос частей механизмов нормируются правилами безопасности.
Из всех ССВ, применяемых в технике, наиболее простыми являются системы с внутренней синхронизацией (СВС) на асинхронных машинах с фазным ротором (МФР), связанных роторными цепями. В литературе [1] рассмотрены только установившиеся режимы таких систем и практически не освещены вопросы динамики. В связи с большой сложностью процессов в таких ССВ наиболее эффективным методом исследования таких режимов является моделирование на ЭВМ.
Одним из наиболее эффективных способов исследования динамики каскадно-связанных приводов является цифровое моделирование на ЭВМ, вопросы, связанные с применением которого, рассматриваются в данной работе.
Целью работы является построение адекватных физическим процессам цифровых моделей СВС, что необходимо для исследования динамики таких систем.
Материалы и результаты исследований.
Моделирование ССВ с внутренней синхронизацией представляет довольно сложную задачу и должно проводиться на основе имеющегося опыта моделирования асинхронных двигателей и вентильных преобразователей [2].
Модели каскадных приводов могут оцениваться по таким признакам, как простота модели, ее устойчивость, универсальность, надежность работы и точность.
Моделирование ССВ и каскадных приводов может осуществляться двумя методами:
– математическим моделированием систем дифференциальных уравнений напрямую и составлением на их базе цифровой модели;
– методом структурного моделирования, который заключается в том, что разрабатываются модели определенных узлов (МФР, роторного выпрямителя) в отдельности, а затем производится их объединение в единую модель.
Недостатком первого метода является сложность и громоздкость модели, что приводит к трудностям при ее отладке и необходимости полностью переделывать модель даже при незначительных изменениях в силовой части. В данной работе будет рассмотрен метод структурного моделирования, который позволяет построить модель из составных частей-блоков и использовать отдельные модели двигателей, преобразователей, других элементов силовой части как подсистемы.
Следующим важным этапом является выбор переменных асинхронного двигателя, что, как указывается [2], существенно влияет на структурную устойчивость и простоту модели. Дифференциальные уравнения асинхронной машины в трехфазной системе координат ротора могут быть записаны относительно неизвестных токов, либо могут содержать и токи, и потокосцепления (в статорных и в роторных уравнениях). В связи с достоинствами выбрана модель асинхронного двигателя в форме «Ψs – Ir», допускающая без значительных преобразований объединение ее с моделью роторного выпрямителя, которая наиболее пригодна для решения поставленных задач [2]. Ниже представлены уравнения в координатах «Ψs – Ir»:
где

 – мгновенные значения потокосцеплений статора;
– мгновенные значения потокосцеплений статора;  ,
, ,
, – мгновенные значения токов ротора;
– мгновенные значения токов ротора;  ,
, – мгновенные значения напряжений статора;
– мгновенные значения напряжений статора;  – коэффициент затухания в цепях статора;
– коэффициент затухания в цепях статора;  – коэффициент затухания в цепях ротора;
– коэффициент затухания в цепях ротора;  – коэффициент рассеяния обмотки статора;
– коэффициент рассеяния обмотки статора;  – коэффициент рассеяния обмотки ротора;
– коэффициент рассеяния обмотки ротора;  – коэффициент рассеяния по Блонделю;
– коэффициент рассеяния по Блонделю;  – базисная частота вращения ротора;
– базисная частота вращения ротора;  – электрическая частота вращения ротора;
– электрическая частота вращения ротора;  – полные индуктивные сопротивления обмоток статора, ротора и контура намагничивания, приведенные к ротору;
– полные индуктивные сопротивления обмоток статора, ротора и контура намагничивания, приведенные к ротору; rs, rr – активные сопротивления обмоток статора, ротора, приведенные к ротору.
Одной из наиболее мобильных программ моделирования электроприводов и других физических устройств является SIMULINK пакета МATLAB, позволяющая составлять модели по иерархическому принципу.
SIMULINK дает возможность составлять модели по системе дифференциальных уравнений (по структурной схеме) или использовать пакет расширения SIM POWER SYSTEM (SPS), с помощью которого можно получить модель из принципиальной схемы. Это дает существенную выгоду при моделировании ССВ и каскадных приводов с преобразователями в роторных цепях, так как отпадает необходимость в составлении громоздких дифференциальных уравнений. В то же время составление модели полностью в SPS приводит к большим осложнениям при описании магнитной цепи машины.
В данной статье предлагается использовать непосредственно SIMULINK для описания статорных уравнений, вывода ЭДС ротора и вычисления электромагнитного момента. Для вычисления токов ротора и исследования переходных процессов в силовой части роторных цепей используется пакет SPS.
Имитационная модель СВС представлена на
рис. 1:
Имитационная модель состоит из блоков-подсистем: MOTOR 1, MOTOR 2 – подсистемы, состоящие из блоков (рис. 2): преобразования частоты «u/f stator» (рис. 4), блок вычисления потокосцеплений статора и их производных «stator» (рис. 5), блок вычисления роторных ЭДС «edc rotor» (рис. 6), блок вычисления электромагнитного момента и скорости «M/w rotor» (рис. 7); ROTOR – блок вычисления роторных токов – выполнен в пакете SIM POWER SYSTEM, представлен на рис. 3.
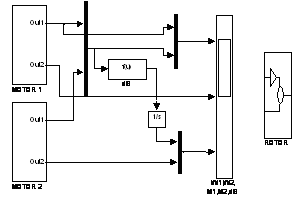 Рисунок 1 – Имитационная модель СВС
Рисунок 1 – Имитационная модель СВС 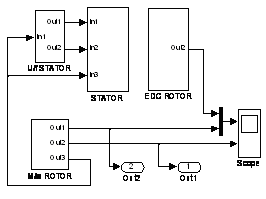
Рисунок 2 – Блок-подсистема Motor 1
Рисунок 3 - Блок вычисления токов ротора

Рисунок 4 – Блок-подсистема преобразования частоты
Рисунок 5 - Блок-подсистема вычисления потокосцеплений статора и их производных
Рисунок 6 - Подсистема расчета роторных ЭДС Рисунок 7 - Блок-подсистема расчета момента и скорости
Рисунок 8 - Подсистема ROTOR с преобразователем в цепи ротора
Рисунок 9 - Результаты моделирования ССВ с внутренней синхронизацией
На рис. 3 приведена модель работы роторной цепи ССВ в пакете SPS, составленная на базе принципиальной схемы, где:
– Ea1 – Ea6 – управляемые источники напряжения, имитирующие ЭДС фаз ротора;
– Ra21–Rc22, La21–Lc22 – активные сопротивления обмоток ротора и собственные индуктивности обмоток статора и ротора, приведенные к ротору для двигателей 1 и 2.
Вычисленные значения токов ротора возвращаются в основную модель с помощью блоков-амперметров через блоки безусловного перехода. Модель блок-подсистемы ROTOR с выпрямителем представлена на рис. 8.
На рис. 8 показана подсистема цифровой модели ROTOR с применением вентильного каскада.
На рис. 9 приведены результаты цифрового моделирования ЭП ССВ. Осциллограммы получены при работе двигателя с начальной нагрузкой на валу М=0.5Мн и набросом нагрузки в момент времени
t=2.5 c еще на 0.5 Мн. Как видно из приведенных осциллограмм, ЭП работает нормально и даже при набросе нагрузки угол рассогласования валов α (электрический) не превышает 60 градусов.
Выводы. В ходе проведенной работы были разработаны цифровые модели ССВ на базе систем с внутренней синхронизацией, что позволяет проводить исследования динамики таких систем.
ЛИТЕРАТУРА
1. Андреев В.П., Сабинин Ю.А. Основы электропривода. М.: Госэнергоиздат, 1963.
2. Сандлер А.С., Тарасенко Л.М. Динамика каскадных асинхронных электроприводов. – М.: Энергия, 1977. – 200 с.
Стаття надійшла 20.04.2006 р.
Рекомендована до друку
д.т.н., проф. Родькіним Д.Й.
Вісник КДПУ. Випуск 3/2006 (38). Частина 2