
1. Основные определения
| Вид материала | Задача |
- Тема: Основные понятия и определения, 164.71kb.
- Надежность в технике основные понятия. Термины и определения гост 27. 002-89 государственный, 583.36kb.
- Гост 60-2003 издания. Основные виды. Термины и определения, 62.99kb.
- Расторгуев С. П. Информационная война, 5412.32kb.
- Сибид. Библиографическая деятельность. Основные термины и определения сибид. Библиографическое, 76.18kb.
- Контрольные вопросы по курсу бжд для групп рк основные определения: биосфера, окружающая, 181.53kb.
- Тема: Основные понятия и определения, 121.92kb.
- 1. Функции нескольких переменных. Основные понятия. Область определения, 13.11kb.
- Федеральный закон, 690.72kb.
- Основные термины и определения 02 техническая подготовка производства (тпп), 31.83kb.
1. Основные определения
Микропроцессорная система – вычислительная, контрольно-измерительная или управляющая система, основным устройством обработки информации в которой является микропроцессор.
Микропроцессорный комплект – совокупность интегральных схем, совместимых по электрическим, конструкторным и информационным параметрам и предназначенных для построения электронно-вычислительной аппаратуры и микропроцессорных систем. В типичный состав микропроцессорного комплекта входит: микропроцессоры (1 или несколько микросхем), БИС интерфейсов и контроллеров внешних устройств, служебные БИС (тактовый генератор, регистры, шинные формирователи и т.д.), могут входить БИС оперативных и постоянно запоминающих устройств (ОЗУ и ПЗУ).
Однокристальный микроконтроллер – устройство, выполненное конструктивно в одном корпусе и содержащее все основные части микропроцессорного комплекта.
По способу управления различают микропроцессоры со схемным и микропрограммным управлением. Микропроцессоры со схемным управлением имеют фиксированный набор команд разработанной компанией-производителем. Микропроцессоры с микропрограммным управлением систему команд разрабатывают на стадии проектирования, на базе простейшего набора микрокоманд, с учетом задач, для решения которых предназначена система.
Электронная система – любой электронный узел, блок или прибор, производящий обработку информации.
Задача – набор функций, выполнение которых требуется от электронной системы
Гибкость – способность системы подстраиваться под различные задачи.
Быстродействие — это показатель скорости выполнения электронной системой ее функций.
Микропроцессорная система может рассматриваться как частный случай электронной системы, предназначенной для обработки входных сигналов и выдачи выходных сигналов.
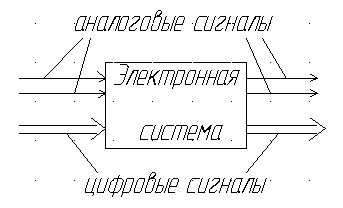
Традиционная электронная система относится к системам с "жесткой логикой". Алгоритм их работы остается постоянным.
Преимущества системы с "жесткой логикой": они обеспечивают максимально возможное быстродействие и имеют высокую надежность.
Недостатки: недостаточная гибкость, сложность разработки. При изменении задачи нужно переделывать всю систему целиком, что требует очень больших затрат.
Микропроцессорные системы не относятся к системам с "жесткой логикой", а относятся к универсальным системам.
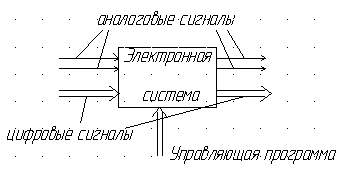
Алгоритм работы универсальной системы определяет управляющая программа.
Достоинства универсальных систем: максимальная гибкость (одну и ту же систему можно использовать для решения разных задач, при этом изменяется алгоритм управляющей программы).
Недостатки: аппаратурная избыточность, пониженная надежность, более низкое быстродействие.
За последние десятилетия быстродействие универсальных микропроцессорных систем возросло на несколько порядков, а большой объем их выпуска привел к снижению стоимости. В результате область применения систем на "жесткой логике" резко сузилась и на их место приходят программируемые системы, предназначенные для решения одной или нескольких близких задач (Пример, INTEL 8X196M C, D, H – 16-ти разрядные контроллеры для управления двигателем. Они удачно совмещают достоинства схем на "жесткой логике" и программируемых систем, обеспечивая сочетания высокого быстродействия и гибкости).
Микропроцессор заменяет практически всю "жесткую логику" традиционной цифровой системой. Он выполняет арифметические операции (сложение, вычитание, умножение), логические операции (сдвиг, сравнение, маскирование), временное хранение кодов, пересылка кодов между узлами микропроцессорной системы и т.д.
2. Микропроцессорная система. Структура микропроцессора. Логическая структура однокристального процессора.
Понятие архитектуры определяет его составные части, а также связи и взаимодействие между ними.
Архитектура включает: 1)структурную схему микропроцессора 2)программную модель микропроцессора (описание функций регистров) 3)информацию об организации памяти (емкость и способы адресации) 4)описание организации процедуры ввода-вывода.
Существует два основных типа архитектуры: фоннеймановская и гарвардская.
Фоннеймановскую архитектуру предложил одноименный американский математик Джо Фоннейман в 1945г. Особенностью архитектуры является то, что программы и данные находятся в общей памяти, доступ к которой осуществляется по одной шине данных и команд.
Гарвардская архитектура была впервые реализована в 1944 г в релейной вычислительной машине гарвардского университета. Особенность этой архитектуры в том, что память данных и команд разделены и имеют отдельную шину данных и шину команд, что позволяет повысить быстродействие.
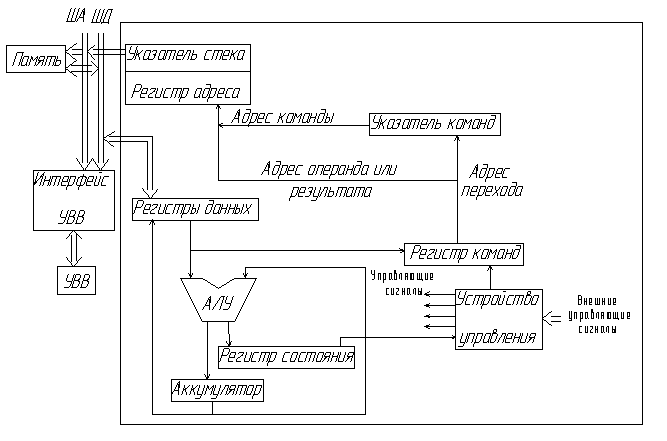
Рис 2. Архитектура микропроцессорных систем
УВВ – устройство ввода-вывода
Устройство управления вырабатывает сигнал для всех блоков микропроцессора в соответствии с кодами команд, внешними управляющими сигналами и сигналами синхронизации, а также управляет обменом информацией между микропроцессором и памятью и УВВ. Устройство управления реализует функции начальной установки микропроцессора, синхронизации, прерывании и согласовании быстродействия модулей микропроцессорной системы.
3. Классификация микропроцессорных БИС
БИС - большая интегральная схема. 1)специализированные микропроцессорные БИС а) арифметические сопроцессоры б) процессоры ввода-вывода 2)секционированные микропроцессорные БИС 3)универсальные микропроцессорные БИС а) вычислительные операции малой степени сложности (8008, 8080, 80286).б) вычислительные операции высокой степени сложности (80386 и выше) в) процессоры задач управления и измерения.
Арифметические сопроцессоры – специализированное процессорное устройство. На его основе нельзя построить самостоятельную микропроцессорную систему. Может использоваться только вместе с универсальным процессором. При этом берет на себя в такой системе все операции, связанные с вычислением.
Процессоры ввода-вывода также работают совместно с универсальным процессором и предназначены для ускорения обмена информацией с внешними устройствами. В настоящее время специализированные процессоры могут работать и без универсальных.
Секционированные процессоры – набор блоков фиксируемой разрядности (обычно 4-16), на базе которых можно сделать процессор практически любой разрядности. В отличие от универсальных и специализированных процессоров имеют не фиксированный набор команд и имеют внешнюю шину управления.
Универсальные микропроцессорные БИС – функционально законченные устройства, способные выполнять функции центрального процессора в микропроцессорной системе. Центральным звеном является арифметико-логическое устройство (АЛУ), также может входить: быстродействующая память (для хранения операндов и промежуточных данных), регистр общего назначения (РОН) и регистр специального назначения (РСН), дешифратор команд, схемы синхронизации, схемы формирования сигналов управления памятью и обменом с внешними устройствами (в том числе по прерываниям и в режиме прямого доступа к памяти ПДП), формирователи (схемы для увеличения нагрузочной способности выводов процессора).
Особенности однокристальных МЭВМ (ОМЭВМ): помимо процессора на кристалле размещены порты ввода-вывода, специально организованная память, таймеры, средства поддержки обмена по прерыванию, средства прямого доступа к памяти, аналогово-цифровые и цифро-аналоговые преобразователи.
Классификация микропроцессорных БИС по техническим характеристикам.
1)технология изготовления (р-МОП (серии 145, 536), n-МОП (серии 580, 1810, 1816), КМОП (серии 588, 587 наименьшее электропотребление), биполярные ТТЛ (серии 580), ТТЛШ (серии 589, 1802), ИИЛ – инжекционная интегральная логика (серии 582), ЭСЛ – эмиттерно-связанная логика - самая быстродействующая.)
2)разрядность микропроцессорных БИС - длина информационного слова, которое может быть одновременно обработано микропроцессором (от 4 до 64 бит).
3)емкость адресуемой памяти – характеризует возможности по взаимодействию в запоминающем устройстве. Однозначно определяется числом адресных линий процессора: если n-линий, то 2n информации.
4)по принципу управления: - программное управление (универсальные микропроцессоры и фиксированный набор команд); - микропрограммное управление (секционированные микропроцессоры с изменяемым набором команд)
5)быстродействие (MIPS – миллион инструкций за секунду, тактовая частота, время машинного цикла, время выполнения операции над данными в аккумуляторе)
6)электрические параметры – количество источников питания и их напряжения: потребляемый ток, количество и амплитуда синхросерий, входные и выходные емкости, сопротивление нагрузки.
4. Специальные требования к микропроцессорным БИС.
- температурный диапазон работы, функционирования и хранения
- масса
- устойчивость к электромагнитным и радиационным воздействиям
- виброустойчивость – аппаратура, которая нормально выполняет свои функции при воздействии вибрации
- ударопрочность – аппаратура, которая может противостоять действию ударов с заданной силой и длительности, и продолжает после этого нормально выполнять свои функции.
- надежность (наработка на отказ и интенсивность отказа)
5. Системы счистления: двоичная, восьмиричная, шестнадцатиричная. Перевод чисел из одной системы в другую.
Cистема счисления - совокупность символов и правил для обозначения чисел.
Разделяют системы счисления позиционные и непозиционные. Непозиционная система счисления задается перечислением изображаемых в ней значений. Позиционная система счисления характеризуется основанием и тем, что числа, как правило, представляются несколькими разрядами (являются многоразрядными), а вес любого разряда определяется его позицией в числе.
Oснование позиционной системы счисления определяет количество различных цифр (символов), допустимое в системе счисления. Это же число определяет, во сколько раз вес цифры данного разряда меньше веса цифры соседнего старшего разряда.
Так, в десятичной системе счисления, основание которой равно 10, различают 10 арабских цифр - 0, 1, 2, ..., 9. Следовательно, при ее использовании для записи числа, не превышающего девяти, достаточно одной цифры, и такое число записывается как одноразрядное. А в случае записи числа, большего девяти, оно представляется как многоразрядное. При этом вес каждого более старшего (расположенного слева от текущего) разряда в десять (основание системы счисления) раз больше текущего.
в позиционной системе счисления достаточно знать значение основания системы счисления, символы, изображающие отдельные цифры, и указанное правило, чтобы представить любое число.
В вычислительной технике широко применяют двоичную, восьмеричную и шестнадцатиричную систему счисления.
Двоичная система счисления имеет основание 2, и, следовательно, две разных цифры - 0 и 1; восьмеричная - восемь разных цифр - 0, 1, 2, 3, 4, 5, 6, 7, а шестнадцатиричная - шестнадцать цифр - десять арабских цифр от 0 до 9 и еще шесть символов -
А (цифра, изображающая десять), D (цифра тринадцать),
В (цифра одиннадцать), E (цифра четырнадцать),
С (цифра двенадцать), F (цифра пятнадцать).
Проще всего сопоставить запись одних и тех же чисел в этих системах счисления можно с использованием таблицы 1, приведенной на следующей странице.
Современные цифровые ЭВМ все используют в качестве основной двоичную систему счисления. К ее достоинствам относится:
* простота выполнения арифметических и логических операций, что влечет за собой простоту устройств, реализующих эти операции;
* возможность использования аппарата алгебры логики (булевой алгебры) для анализа и синтеза операционных устройств ЭВМ.
К неудобствам двоичной системы счисления относится необходимость перевода чисел из десятичной в двоичную и наоборот, а также то, что запись числа в двоичной системе громоздка (требует большего числа разрядов, чем привычная для человека десятичная). По этой и ряду других причин, кроме двоичной применяются восьмеричная и шестнадцатиричная системы счисления.
Совместное использование указанных систем обусловлено двумя причинами:
* в восьмеричной и шестнадцатиричной системах любое число записывается более компактно, нежели двоичное;
* простотой преобразования из двоичной в восьмеричную (шестнадцатирич-ную) систему счисления и наоборот.
Приведем правила перевода чисел из двоичной системы в восьмеричную (шестнадцатиричную) и наоборот.
П1 .Правило перевода "8с/с -> 2c/c"
При переводе многоразрядного числа каждую цифру исходного восьмеричного числа представить всегда точно тремя двоичными цифрами, взятыми из приведенной выше таблицы. При этом, если для записи соответствующей восьмеричной цифры в виде двоичной требуется менее трех двоичных цифр, двоичный эквивалент дополняется слева нулями (незначащие нули не исказят значения числа). Таким образом, например, при записи четырехразрядного восьмеричного числа должно получиться двенадцатиразрядное двоичное. После окончания такого преобразования можно отбросить старшие для всего числа незначащие двоичные цифры.
Отметим, что три цифры принято называть триадой. Поэтому можно сказать, что при описываемом переводе каждая восьмеричная цифра заменяется соответствующей ей триадой двоичных цифр.
Пример.
Преобразуем восьмеричное число 371,62.
Для этого запишем для каждой цифры соответствующую триаду:
3 --> 011
7 --> 111
1 --> 001
6 --> 110
2 --> 010
Теперь можно записать число в двоичной форме (для наглядности между триадами поместим пробелы):
371,62 -> 011 111 001 , 110 010
И, наконец, запишем полученное двоичное число так, как это принято в математике, без незначащих нулей, а также отбросив правые нули в дробной части числа:
371,62 -> 11111001,11001
П2. Правило перевода "2с/с -> 8c/c"
При переводе многоразрядного двоичного числа в восьмеричную форму поступают следующим образом: Исходное число разбивают на триады. При этом для целой части числа разбиение проводят от местонахождения запятой влево, а для дробной части - от этого же места вправо. Затем самая левая группа при необходимости дополняется незначащими нулями до образования триады, а самая правая группа только в дробной части дополняется нулями справа также до образования полной триады. После этого каждая триада заменяется соответствующей восьмеричной цифрой. Местоположение запятой сохраняется по тем же правилам, что и в правиле П1.
Пример.
Представить двоичное число 1101100,01111101 в форме восьмеричного.
Разобьем исходное число на группы по три цифры, приняв в качестве точки отсчета местоположение запятой (для наглядности между триадами поместим пробелы):
1 101 100 , 011 111 01
Теперь дополним до трех цифр нулями самую левую группу слева и самую правую группу справа:
001 101 100 , 011 111 010
И, наконец, заменим каждую триаду соответствующей восьмеричной цифрой:
001 101 100 , 011 111 100 --> 154,372
П3. Правило перевода "16с/с -> 2c/c"
При переводе многоразрядного шестнадцатиричного числа в двоичную форму каждую цифру исходного числа заменяют группой точно из четырех двоичных цифр (заменяют тетрадой двоичных цифр). Местоположение запятой сохраняется по тем же правилам, что и в правиле П1. В окончательной записи можно отбросить самые левые (незначащие) нули и самые правые нули дробной части.
Пример. Преобразовать шестнадцатиричное число "6C,7D" в двоичную форму.
Для этого запишем для каждой цифры соответствующую тетраду:
6 --> 0110
C --> 1100
7 --> 0111
D --> 1101
Теперь можно записать число в двоичной форме (для наглядности между тетрадами поместим пробелы):
6C,7D -> 0110 1100 , 0111 1101
И, наконец, запишем полученное двоичное число так, как это принято в математике, без незначащих нулей:
6C,7D -> 1101100,01111101
П4. Правило перевода "2с/с -> 16c/c"
6. Интерфейс микропроцессора, магистрали и их особенности. Мультиплицирование магистралей.
Чтобы организовать обмен между различными модулями (природа, уровень сигналов), необходимо дополнительное сопряжение таких модулей. Специализированные средства, предназначенные для этого, называются интерфейсами.
Интерфейс: 1)внешний интерфейс – совокупность средств не только технических, обеспечивающих взаимодействие между двумя иерархическими модулями системы (уровнями системы). 2)внутренний интерфейс – совокупность средств, обеспечивающих взаимодействие между структурными единицами одного и того же уровня.
Интерфейс (в узком смысле) – технические средства, через которые проводится обмен между модулями системы и внешними модулями. Причем здесь определены назначения входов и выходов, задана совокупность сигналов, передаваемых и принимаемых (управление данных, адресов, установленные уровни, длительности сигналов, определенный порядок следования, обеспечена совместимость входов/выходов по нагрузочной способности и технологии).
Сейчас выполняются программируемые микросхемы со встроенными средствами интерфейса.
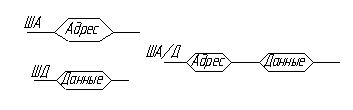
В ШМС входят 3 основные магистрали: адреса, данных и управления
Шина данных – основная шина. Количество ее разрядов (линий связи) определяет скорость и эффективность информационного обмена, а также максимально возможное количество команд. Передача данных всегда двунаправленная. Наиболее встречающийся тип выходного каскада шины данных с 3-мя состояниями. Разрядность ШД обычно кратна 8.
Шина адреса – определяет сложность микропроцессорной системы, т.е. допустимый объем памяти и, следовательно, максимально возможный размер программы и запоминаемых данных. ША чаще всего однонаправленная, может быть двунаправленной только при наличии контроллера прямого доступа к памяти. Тип выходных каскадов либо с 3-мя состояниями, либо с 2-мя состояниями.
Примечание: Как в шине адреса, так и в шине данных может использоваться как положительная, так и отрицательная логика.
Для снижения количества линий связи применяется мультиплексирование шины адреса и данных, т.е. одна и та же шина используется для передавания адреса и данных.
В некоторых магистралях после одного кода адреса передается несколько кодов данных.
Шина управления – вспомогательная шина, сигналы которой определяют тип текущего цикла и фиксируют моменты времени, соответствующие разным стадиям цикла. Управляющие сигналы обеспечивают согласование работы процессора (или другого управляющего устройства) с работой памяти или устройства-исполнителя. Сигналы управления чаще передаются в отрицательной логике. Шина управления может быть как однонаправленной, так и двунаправленной. Тип выходных каскадов с 2-мя состояниями для однонаправленных линий, с 3-мя состояниями для двунаправленных линий, с открытым коллектором для двунаправленных и мультиплексированных линий. Самые главные управляющие сигналы – это стробы обмена, т.е. сигналы, формируемые процессором и определяющие моменты времени, когда происходит обмен данными. При этом большое значение имеет то, как процессор заканчивает обмен в пределах цикла, и в какой момент он снимает строб обмена. Возможны 2 варианта: - при асинхронном обмене процессор заканчивает обмен только тогда, когда устройство- исполнитель подтверждает выполнение операции специальным сигналом – handshake (режим "рукопожатия"); - при синхронном обмене процессор заканчивает обмен данными самостоятельно через установленный временной интервал без учета интересов устройства-исполнителя.
- Циклы обмена информацией для процессора К580ВМ80
Обмен информацией в микропроцессорных системах происходит в циклах обмена информацией. Под циклом обмена информацией понимается временной интервал, в течение которого происходит выполнение одной элементарной операции обмена по шине. Например, пересылка кода данных из процессора в память или же пересылка кода данных из устройства ввода/вывода в процессор. В пределах одного цикла также может передаваться и несколько кодов данных, даже целый массив данных, но это встречается реже.
Циклы обмена информацией делятся на два основных типа:
- Цикл записи (вывода), в котором процессор записывает (выводит) информацию;
- Цикл чтения (ввода), в котором процессор читает (вводит) информацию.
В некоторых микропроцессорных системах существует также цикл «чтение-модификация-запись» или же «ввод-пауза-вывод». В этих циклах процессор сначала читает информацию из памяти или устройства ввода/вывода, затем как-то преобразует ее и снова записывает по тому же адресу. Например, процессор может прочитать код из ячейки памяти, увеличить его на единицу и снова записать в эту же ячейку памяти. Наличие или отсутствие данного типа цикла связано с особенностями используемого процессора.
Особое место занимают циклы прямого доступа к памяти (если режим ПДП в системе предусмотрен) и циклы запроса и предоставления прерывания (если прерывания в системе есть). Когда в дальнейшем речь пойдет о таких циклах, это будет специально оговорено.
Во время каждого цикла устройства, участвующие в обмене информацией, передают друг другу информационные и управляющие сигналы в строго установленном порядке или, как еще говорят, в соответствии с принятым протоколом обмена информацией.
Длительность цикла обмена может быть постоянной или переменной, но она всегда включает в себя несколько периодов сигнала тактовой частоты системы. То есть даже в идеальном случае частота чтения информации процессором и частота записи информации оказываются в несколько раз меньше тактовой частоты системы.
Чтение кодов команд из памяти системы также производится с помощью циклов чтения. Поэтому в случае одношинной архитектуры на системной магистрали чередуются циклы чтения команд и циклы пересылки (чтения и записи) данных, но протоколы обмена остаются неизменными независимо от того, что передается — данные или команды. В случае двухшинной архитектуры циклы чтения команд и записи или чтения данных разделяются по разным шинам и могут выполняться одновременно.
Машинные циклы процессора 580ВМ80
Существует 10 машинных циклов. Все начинаются с буквы М и разбиты на 3 группы:
- цикл чтения – М1, М2, М4, М6, М8, М10
- цикл записи – М3, М5, М7
- цикл остановки – М9
М1 – цикл извлечения кода команды. С этого цикла начинается любая команда.
М2 – чтение данных из памяти по адресу, расположенному в паре регистров или счетчике команд
М3 – цикл записи в память по адресу, расположенному в одной из пар регистров
М4 – чтение из стека, т.е. чтение из ячейки памяти, на которую указывает SP
М5 – цикл записи в стек
М6 – цикл чтения данных из внешнего устройства в аккумулятор
М7 – запись из аккумулятора во внешнее устройство
М8 – цикл обслуживания прерывания
М9 – цикл остановки
М10 – цикл обслуживания прерываний в режиме остановки.