
Шавуров Геннадий Анатольевич Мельников Сергей Рафаэяьевшч геотроника. Наземные и спутниковые средства и методы выполнения геодезических работ учебное пособие
| Вид материала | Учебное пособие |
- Сергей Мельников: Точность распознавания речи доходит до 90%, 86.38kb.
- Рекомендовано к изданию решением секции организации строительного производства цнииомтп, 1660.36kb.
- Реферат отчет 213 с., 12 ч., 63 рис., 18 табл., 223 источников, прил, 258.47kb.
- Наименование программы Виды работ* Курсы по строительству бс-01, 118.49kb.
- Учебное пособие Челябинск Издательство юургу 1999, 543.67kb.
- Глинка Николай Леонидович. Общая химия: учебное пособие, 501.78kb.
- Регламентирующие методы управления, 75.96kb.
- Г. Р. Державина академия управления и сервиса кафедра менеджмента и маркетинга учебное, 1147.35kb.
- Правила выполнения и оформления экзаменационной работы по дисциплине Используемая литература, 10.3kb.
- Курс считается освоенным при условии успешного прохождения итогового теста., 378.91kb.
В ОР8 разрешение многозначности сводится к вычислению параметров многозначности 0, то есть числа целых уложений длин волн во второй разности для каждой пары пунктов и для каждой пары спутников в начальный момент регистрации результатов. Как было сказано, это напоминает задачу радиолага или фазового зонда в наземных системах. Принципиальное отличие состоит в следующем. В наземных системах имеется возможность определить параметр многозначности, когда носитель начинает движение с пункта, расстояние до которого с опорного пункта известно изначально. В спутниковой системе такая возможность отсутствует. Нет твердого пункта в околоземном пространстве, с которого спутник мог бы начать свое движение. Единственный выход состоит в том, чтобы включить набор параметров многозначности #0 в число определяемых параметров. Другими словами, в уравнивании в качестве неизвестных участвуют помимо координат вектора базы еще и па-
109
Геотроника
Глобальные системы позиционирования
Вторая разность имеет замечательную особенность. Поскольку во второй разности исключаются начальные фазы колебаний спутника и приемника, то теоретически число уложений длин волн во второй разности действительно является целым. Поэтому есть право при обработке округлять число уложений длин волн до целого числа. Так и делают. Более того — вторые разности — это основа обработки в том смысле, что именно на основе вторых разностей получают окончательные результаты. Самой большой проблемой при этой обработке является разрешение многозначности. Необходимо определить набор целых чисел Ло в начальный момент наблюдений для каждой пары пунктов и для каждой пары спутников, наблюдаемых с этих пунктов. Проблема аналогична задаче радиолага или фазового зонда, но решается она совершенно по-другому. В третьих разностях проблема многозначности не решена, но снята.
Третья разность — это разность двух вторых разностей. Геометрия иллюстрирована рисунком 7.5. В начальный момент времени <х формируют вторую разность и продолжают непрерывную обработку до момента <2. В разности исключается параметр многозначности 70. Это и означает, что проблема многозначности снимается. Расплачиваться за это приходится тем, что ухудшается геометрия наблюдений, то есть изоповерхнос-ти пересекаются под углами, далекими от прямых углов. В результате ошибка определения вектора базы лежит в пределах 1-3 метра. Такая точность неприемлема для геодезии, тем не менее третьи разности в процедуре обработки результатов используют.
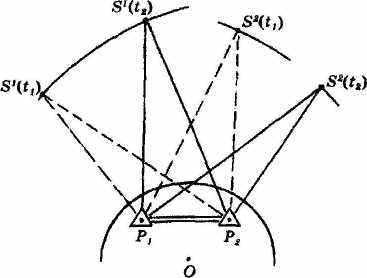
Рис. 7.5. Третья разност*
108
Еще раз напомним, что в геодезии обработку результатов измерений выполняют по способу наименьших квадратов, основанному на составлении и решении системы линейных уравнений. В ОР8, также как и в большинстве других геодезических методов, уравнения, связывающие измеряемые величины и определяемые параметры, линейными не явля-
',!■
хотя некоторые спутники могли функционировать и 10 лет, поскольку на это время хватало запаса расходуемых материалов, в основном топлива. Различие между В1оск I и В1оск II связано с национальной безопасностью США. Сигнал спутника В1оск I был полностью доступен гражданскому пользователю, тогда как некоторые сигналы В1оск II ограничивают эту доступность.
Спутники класса В1оск ПК, практически полностью заменившие в настоящее время ранее запущенные, имеют конструкционную продолжительность жизни в 10 лет. Буква «К» означает модификацию или замену. На борту имеются водородные мазеры взамен рубидиевых и цезиевых стандартов частоты, установленных на спутниках предшествующих классов. Каждый спутник весит более двух тонн, стоит около 25 миллионов долларов. Запускают эти спутники с помощью Шаттла.
7.3.1. Структура сигнала спутника
Основой работы системы является точное измерение времени и временных интервалов. Термин точное означает, что для достижения наивысшей точности используют все доступные средства. На главной станции управления и контроля, а также на каждом спутнике установлены наиболее точные из существующих сейчас цезиевые и водородные стандарты частоты и времени. Частота колебаний стандарта равна 10,23 Мгц. Все колебания и сигналы спутника получают из этой частоты путем когерентного преобразования: умножения и деления частоты опорного генератора — стандарта частоты и времени. Два колебания несущей частоты получают умножением частоты опорного генератора на соответствующий коэффициент. Колебание 2=1575,42 МГц получают умножением на 154. Колебание 1,2=1227,60 МГц получают умножением на 120. Измерения на двух несущих частотах используют для реализации дисперсионного способа учета влияния ионосферы и для облегчения процедуры разрешения многозначности фазовых измерений.
Несущие колебания модулируют кодовыми сигналами: С/А-кодом и Р-кодом. При этом Р-кодом модулируют оба несущих колебания; С/А-кодом модулируют только колебания первой несущей частоты. Тактовая частота Р-кода равна частоте колебаний опорного генератора. Тактовую частоту С/А-кода получают делением частоты колебаний опорного генератора на десять. О кодах написано в разделе 7.3.4. Кроме того, несущие
97
 Геотроника
ГеотроникаГлобальные системы позиционирования
колебания модулированы навигационным спутниковым сообщением.
7.3.2. Навигационное сообщение, эфемериды
Навигационное сообщение называют также спутниковым сообщением или навигационным спутниковым сообщением. В англоязычной терминологии — это паУ1§аиоп таззае. Далее для краткости будем использовать термин сообщение. Сообщение передается за 30 секунд. Но не вся информация передается в этот краткий отрезок времени. Например, альманах передается в течение нескольких сообщений, об альманахе см. далее. Сообщение содержит пять блоков (кадров, подкадров, по-английски — виЫгатев). Каждый блок транслируется в течение 6 секунд и содержит 10 слов. Каждый блок начинается с телеметрического слова — 1е1ете1гу тоогё (ТЬМ). Оно содержит синхронизирующий формат и диагностическое сообщение — сообщение или часть сообщения о статусе спутника и системы в целом. Далее идет ключевое слово — папд-оуег \гогй (НО). Этот термин можно перевести как слово, передаваемое из рук в руки. По смыслу НО — это временная метка.
Первый блок содержит параметры часов спутника и коэффициенты модели ионосферы. Параметры часов — это поправка и ход часов спутника относительно ОР8Т. Информацию о параметрах модели ионосферы используют только при работе с одночастотными приемниками. Если есть двухчастотный приемник, то применяют дисперсионный способ.
Второй и третий блок содержат эфемериды спутника, транслирующего данное сообщение. Эти эфемериды называют широковещательными. Их получают из результатов наблюдения спутников с пяти станций слежения.
Наблюдение спутников станциями слежения, первичная обработка результатов, передача их на главную станцию управления и контроля, обработка результатов там, передача их на станции закладки информации и сама закладка требуют времени. Следовательно, хранящиеся в памяти бортовых компьютеров и транслируемые широковещательные эфемериды в момент их трансляции уже устарели. Поэтому транслируемые эфемериды — это результат предсказания, экстраполяции. По этой причине эфемериды закладывают в память бортовых компьютеров спутников как можно чаще — примерно каждый час.
Четвертый блок зарезервирован для передачи служебной
98
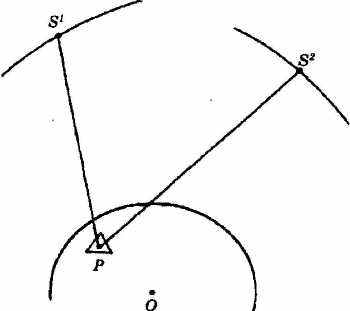
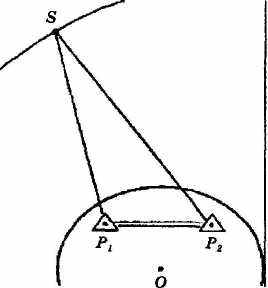
Рис. 7.3. Первая разность приемник-приемник
Рис. 7.2. Первая разность спутник-спутник
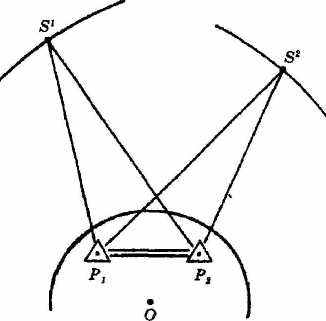
разности исключается начальная фаза с1<ра колебаний спутника. Чтобы исключить и ту и другую начальные фазы, необходимо сформировать вторую или двойную разность. Двойную разность получают, выбрав из результатов данные, полученные из одновременных наблюдений двух спутников двумя приемниками. Этот вариант приведен на рисунке 7.4. Другими словами: вторая разность — это разность двух первых разностей. При формировании разностей фазовых измерений система перестает быть дальномерной и превращается в разностную. Изоповерхности становятся гиперболоидами и геометрический фактор (угол засечки), как правило, ухудшается. Следует также подчеркнуть, что при формировании разностей выражений вида (7.1) образуются и разности N. Первая разность содержит разность целых уложений длин волн в расстояниях до спутника. Вторая разность содержит разность целых уложений длин волн, содержащихся
Рис. 7.4. Вторая разность
107
в первых разностях.
Геотроника
тысячи циклов в секунду. Существуют сбои в счете и это - отдельная проблема. В целом многозначность разрешают способом, во многом аналогичном способу радиолага и способу фазового зонда, используемым в наземных системах. Отличие в том, что расстояние до спутника в начальный момент измерений в спутниковой системе с достаточной точностью знать нельзя. Сюда примешиваются проблемы, связанные с неопределенностью начальных фаз. Если впрямую использовать уравнение (7.1), то нет основания округлять приближенно определенное значение Л/у до ближайшего целого числа, как это делают в дальномерах. И кроме того, если при наземных измерениях наблюдатель имеет достаточно времени для разрешения многозначности, при спутниковых измерениях многозначность необходимо разрешить «мгновенно», быстрое перемещение спутника не дает возможности повтора. Проблемы этим не ограничиваются. Напомним, что СР8 создавалась как навигационная кодовая система, изначально не предназначенная для фазовых измерений. В ней нет стройной сетки частот, специально предназначенной для разрешения многозначности. Все сказанное приводит к тому, что разрешение многозначности — самая большая проблема в спутниковых измерениях. Решить эту проблему удается, формируя разности результатов фазовых измерений.
В геодезических измерениях участвуют несколько приемников, как минимум два. Каждый приемник одновременно принимает и регистрирует сигнал нескольких спутников. Рассмотрим два элементарных случая: один приемник одновременно принимает и регистрирует сигнал двух спутников; два приемника одновременно принимают и регистрируют сигнал одного спутника. Первый случай иллюстрирован рисунком 7.2. Второй случай иллюстрирован рисунком 7.3. На этапе постобработки программное обеспечение формирует разности фазовых измерений. Другими словами, в первом случае формируют разность фаз сигналов от двух спутников на одном приемнике. Во втором случае формируют разность фаз сигналов от одного спутника на двух приемниках. Это называют первой или одинарной разностью «спутник-спутник* и «приемник-приемник».
Если сформировать разность выражений вида (7.1) для варианта спутник-спутник, то в разности исключается начальная фаза 8фг колебаний приемника. Если сформировать разность выражений вида (7.1) для варианта приемник-приемник, то в
106
_ Глобальные системы позиционирования
информации. Приемники гражданских пользователей не имеют возможности регистрации этой информации.
, I Пятый кадр содержит альманах спутников и информацию
о состоянии системы. Альманах — это приближенные эфеме
риды всех спутников системы и данные о здоровье каждого
11« спутника. Каждый спутник в течение 12,5 минут транслирует
1 информацию о созвездии спутников. Чтобы получить альманах
I до начала наблюдений и использовать эти данные на этапе пла-
нирования необходимо выставить приемник на открытое место, подержать его там включенным минут 15-20, выключить и скачать данные на офисный компьютер. В процессе наблюдений свежий альманах получают вообще без дополнительных
I затрат времени.
Эфемериды спутника — это набор данных об орбите спутника и о положении спутника на орбите. Пользователя ОРВ интересуют геоцентрические координаты спутника в системе О8 84 в момент ухода сигнала с этого спутника. Аппаратура пользователя вычисляет координаты спутника, используя данные, содержащиеся в файле эфемерид. Эфемеридная информация отнесена к референцному (опорному, исходному) моменту ?0. Этот момент указан в файле эфемерид. В сообщении приведен
1 также АСЮЕ (А§е о1 БаЪа) — «возраст» эфемеридных данных,
то есть интервал времени, прошедший с момента последней закладки данных в память бортового компьютера. Напомним, что параметры эфемерид являются оскулирующими и относятся к референцному моменту.
Далее конспективным образом перечислена информация, содержащаяся в широковещательных эфемеридах, л/а — корень квадратный из большой полуоси эллипса орбиты, е — эксцентриситет орбиты. О — прямое восхождение восходящего узла орбиты спутника. О,' — скорость изменения прямого восхождения восходящего узла орбиты спутника. I — угол наклона плоскости орбиты к плоскости экватора, со — аргумент перигея, г' — скорость изменения угла наклона. Мо — средняя аномалия на референцный момент. Лп — отклонение значения среднего движения от предвычисленного. С и Сш — амплитуды косинусоидального и синусоидального членов в формуле для поправки в аргумент широты. Сге и С„ — амплитуды косинусоидального и синусоидального членов в формуле для поправки в радиус орбиты. С1с и Сгв — амплитуды косинусоидального и синусоидального членов в формуле для поправки в угол накло-
99
 Геотрон ика
Геотрон икаГлобальные системы позиционирования
на орбиты. Формулы для возмущений оскулирующих элементов учитывают только влияние на движение спутника сжатия Земли.
7.3.3. Вычисление орбитальных координат спутника по его эфемеридам
Рассмотрим, как используют эфемериды спутника для вычисления его прямоугольных координат Хо и Уо в орбитальной системе координат на момент наблюдений. Для этого рассмотрим формулы:
Хо = гсови!
|' (7<3)
Отсюда видно, что задача сводится к определению на момент наблюдений радиуса орбиты г спутника и аргумента широты и. Момент наблюдений г получают из фиксации момента прихода на приемник временной метки. В качестве исходной информации используют также значение одной из фундаментальных геодезических постоянных ц — произведение гравитационной постоянной на массу Земли. В\АГО8 84 ц=3,9860081014 м3/сек2.
Процедуру вычисления орбитальных координат разделяют на четыре этапа. На первом этапе вычисляют истинную аномалию и. Порядок вычислений следующий. Вычисляют временной интервал А*, прошедший от референцией исходной эпохи *0 до момента г наблюдений: Д*=*-*о. Вычисляют приближенное значение среднего движения ло=(ц/а3)1/2. Вычисляют уточненное значение среднего движения п=по+Ап. Вычисляют среднюю аномалию М=-М0+пМ. Используя уравнение Кеплера М**Е+е91пЕ, вычисляют эксцентрическую аномалию Е. И окончательно на этом этапе вычисляют истинную аномалию V, используя формулы:
со81>=в(со8.Е-е)/( 1-есоз.Е) и
На втором этапе вычисляют значение аргумента широты и. Порядок вычислений следующий. Вычисляют приближенное значение аргумента широты ио+а>. Вычисляют поправку в приближенное значение аргумента широты за влияние сжатия Земли на орбиту спутника по формуле: Дц==Сцссо82и0 +Сивз1п2и0. Напомним, что коэффициенты С содержатся в эфемеридах.
100
себя, если оператор забыл ввести высоту антенны. Вместе с тем, аппаратура не может контролировать все действия оператора. Центрирование антенны над пунктом — процедура бесконтрольная. При измерении высоты антенны над пунктом и при введении ее значения в память приемника оператор может допустить ошибку, а программное обеспечение не сможет эту ошибку выявить. Выполняя постобработку, оператор выявляет ошибки в исходной информации: в высоте антенны, в имени файла, в идентификаторе пункта. Выявив ошибку, оператор устраняет ее.
Обработав очередную базу, оператор выясняет, как результат согласуется с исходными данными и с результатами, полученными им ранее. Речь идет о том, как согласуются полученные разности координат с каталожными разностями координат исходных пунктов и каковы координатные невязки замкнутых фигур. Как сказано ранее, согласование результатов спутниковых измерений с созданными ранее сетями создает проблемы. Что касается невязок замкнутых фигур, то векторная сумма баз должна быть равна нулю. Другими словами, должны выполняться равенства:
(7.6)
Существенное отклонение от этого условия свидетельствует о низкой точности или о грубых ошибках в результатах. Не существует инструкции, оговаривающей допуски, поэтому данный вопрос решают, исходя из личного опыта. Основное время при постобработке занимает разрешение многозначности.
7.4.2. Многозначность, разности фазовых измерений
Эти два вопроса рассмотрим на основе формулы (7.1). Существуют две проблемы: разрешение многозначности и учет начальных фаз 5ф" и 8фг колебаний генераторов спутника и приемника. Приемник не только измеряет разность фаз <р(*), но непрерывно регистрирует результат этого измерения. Такая процедура называется счетом целых фазовых циклов. В наземных системах счет идет достаточно медленно: единицы циклов в секунду или в минуту. В спутниковой системе приемник считает
105
 Геотроника
ГеотроникаГлобальные системы позиционирования
ного сигнал спутника называют псевдошумовым, а коды — псевдослучайными.
Существуют два вида измерительных кодов. Легко доступный, легко обнаруживаемый, широковещательный код — С/А-соде — Соагзе АсдшзШоп соае. Точный Р-сос1е — Ргемзюп соде. Спутник имеет индивидуальный С/А-код, повторяющийся каждую миллисекунду. Приемник идентифицирует и захватывает сигнал спутника на частоте Ьх легко, поскольку эта частота модулирована С/А-кодом. Гораздо сложнее дело обстоит с захватом сигнала спутника на частоте Ьг, то есть на второй несущей частоте. С/А-код на нее не подают, так что захват сигнала и последующие наблюдения возможны только в Р-коде. Это затрудняет работу пользователя и это затруднение намеренно заложено в структуру системы.
Спутнику в данную эпоху присущ Р-код, повторяющийся через неделю. В то же время, системе присущ весь Р-код в целом. Длительность Р-кода системы равна 266,4 суток. Другими словами, весь длинный Р-код системы разделен на недельные отрезки, интервалы. Каждый отрезок в данную эпоху приписан конкретному спутнику. Изначально доступ к Р-коду имели только авторизованные пользователи, в основном, американские военные. Сейчас аппаратура практически всех пользователей имеет доступ к Р-коду. Этот доступ осложнен тем, что Р-кодовый сигнал подвергнут дополнительному кодированию (шифрованию) так называемым У-кодом. Как сказано в литературе, сделано это для того, чтобы предотвратить возможность нарушения работы системы путем внешнего вмешательства. Такой режим работы назван Ап-Ц-8роойп§ (А8) — режим противодействия несанкционированному воздействию. Он сводится именно к использованию У-кода. В свою очередь, У-кодиро-вание - это обмен недельными отрезками Р-кода между спутниками в последовательности, известной лишь персоналу, управляющему системой. Если эта последовательность неизвестна пользователю, то есть его приемник не содержит соответствующего чипа, то отсутствует возможность захватить сигнал в Р-коде на второй несущей частоте и дорогой высокоточный двухчастотный приемник может работать только как одноча-стотный. Производители аппаратуры, однако, тем или иным путем преодолели эти трудности, например, заплатив за возможность установки в приемники соответствующих чипов.
Наблюдения в С/А-коде называют 81апаагд РовШошп
102
Зеглаве (8Р8) — стандартной службой позиционирования. Навигационные координаты в этом режиме определяют с ошибкой 100-200 метров. Наблюдения в Р-коде называют Ргесгве РозШоптв Бегущее (РР8) — служба определения точного местоположения. Навигационные координаты в этом режиме определяют с ошибкой порядка 10-20 метров.