
В. Н. Шивринский проектирование информационных систем учебно-методический комплекс
| Вид материала | Учебно-методический комплекс |
- Учебно-методический комплекс дисциплины проектирование информационных систем Для студентов, 466.59kb.
- Еремеев Андрей Владимирович, кандидат технических наук, доцент кафедры информационных, 344.4kb.
- Учебно-методический комплекс дисциплины проектирование информационных систем Специальность, 449.6kb.
- Учебно-методический комплекс по специальности 230700 «Прикладная информатика в геодезии», 383.76kb.
- В. Н. Шивринский проектирование информационных систем тесты, 1429.35kb.
- Учебно-методический комплекс по дисциплине дс. 01 -проектирование и надежность систем, 688.46kb.
- И. Д. Алекперов учебно-методический комплекс дисциплины "информатика" Ростов-на-Дону, 952.05kb.
- Учебно-методический комплекс по дисциплине «Теория экономических информационных систем», 1507.83kb.
- Учебно-методический комплекс для студентов заочного обучения специальности Прикладная, 63.23kb.
- Учебно-методический комплекс для специальности 080301 Коммерция (торговое дело) Москва, 698.21kb.
ВЫПОЛНЯТЬ ПОКА ПЕРЕКЛЮЧАТЕЛЬ НЕ ВКЛЮЧЕН
ВЫЗОВ: СЧИТЫВАНИЕ ПЕРЕКЛЮЧАТЕЛЯ (;ПЕРЕКЛЮЧАТЕЛЬ)
КОНЕЦ
2) все основные операции, содержащиеся внутри пары скобок, смещаются на одинаковые расстояния;
НАЧАЛО ПРОЦЕДУРЫ
ВЫЗОВ: ИНИЦИАЛИЗАЦИЯ АППАРАТУРЫ (;)
ВЫЗОВ: ВОССТАНОВЛЕНИЕ СИСТЕМЫ (;)
ВОЗВРАТ
КОНЕЦ ПРОЦЕДУРЫ
3) слова ТО и ИНАЧЕ условной конструкции располагаются на разных строках и смещаются по отношению к слову ЕСЛИ на одинаковые расстояния; если внутри части ТО или ИНАЧЕ условной конструкции появляется отдельная операция, то она располагается на той же строке, что и слово ТО или ИНАЧЕ;
ЕСЛИ ВСЕ ЗАПИСИ КРОМЕ ПОСЛЕДНЕЙ ВЫБРАНЫ
ТО ВОЗВРАТ
ИНАЧЕ ВЫБИРАЕТСЯ СЛЕДУЮЩАЯ ЗАПИСЬ В ФАЙЛЕ
4) если внутри части ТО или ИНАЧЕ условной конструкции содержится более одной операции, то эти операции следует заключить в скобки ВЫПОЛНИТЬ ... КОНЕЦ, причем слово ВЫПОЛНИТЬ располагается на той же строке, что и слово ТО или ИНАЧЕ.
ЕСЛИ ТАЙМЕР В СОСТОЯНИИ ПОКОЯ
ТО ВЫПОЛНИТЬ
ВЫЗОВ: ОСТАНОВКА ТАЙМЕРА (;)
УСТАНОВИТЬ ПРОДОЛЖЕНИЕ
ВОЗВРАТ
КОНЕЦ
Требования пользователей и функциональная спецификация
Требования пользователя определяют, что пользователь хочет от системы и что она должна делать. Требования пользователя могут быть определены путем изучения рынка сбыта на основе спроса покупателей.
Функциональная спецификация определяет, какие функции должны выполняться для удовлетворения требований пользователя и обеспечения интерфейса между системой и окружением. Так как система проектируется на основе информации, содержащейся как в требованиях пользователя, так и в функциональной спецификации, важно, чтобы функции, отображающие требуемое поведение системы, были описаны достаточно подробно.
Выявление требований пользователя и разработку функциональной спецификации рассмотрим на примере автоматизированной системы охранной сигнализации, приведенном в работе [11].
Предположим, что необходимо разработать автоматизированную систему охранной сигнализации. Попытаемся определить набор требований пользователя к этой системе. Вопросы, которые задают в первый момент, должны быть связаны только с тем, что должна делать система охранной сигнализации. В частности, необходимо получить ответы на следующие вопросы:
1. Какие типы нарушений необходимо обнаруживать?
2. Какие действия требуются при обнаружении нарушителя?
3. Какие другие действия необходимо предусмотреть?
Из ответов на эти вопросы можно сделать вывод относительно того, что будут собой представлять требования пользователя. Разрабатываемая система должна выполнять следующие действия:
1) обнаруживать, когда открывается дверь или окно;
2) обнаруживать движение внутри охраняемой зоны;
3) иметь возможность предупредить нарушителя и вызвать помощь;
4) обеспечить возможность восстановления в случае забывчивости оператора;
5) быть несложной в управлении;
6) минимизировать число ложных тревог.
Далее разрабатывается функциональная спецификация, которая должна давать ответы на следующие вопросы: Какие средства необходимо предусмотреть для: 1) обнаружения несанкционированного открытия окна или двери? 2) обнаружения движения? 3) предупреждения нарушителя и вызова помощи? 4) восстановления системы в случае забывчивости оператора? 5) управления системой? 6) предотвращения ложных тревог?
В рассматриваемой системе для обнаружения несанкционированного открытия двери или окна должны использоваться контактные датчики. Для обнаружения движения должен использоваться ультразвуковой датчик движения. С целью предупреждения ложной тревоги движение должно контролироваться в течение не менее пяти секунд, после чего считается, что обнаружен нарушитель. Предупреждение оператора о том, что он обязан восстановить систему, осуществляется с помощью визуального сигнала. Если система не восстановлена в течение шестидесяти секунд, для предупреждения нарушителя и вызова помощи включается сигнал звуковой тревоги. Для управления системой и ее восстановления должен использоваться кнопочный переключатель.
Если распределить информацию по категориям ВХОДЫ, ВЫХОДЫ, ФУНКЦИИ, можно изобразить функциональную спецификацию в виде, представленном на рис.3.3.
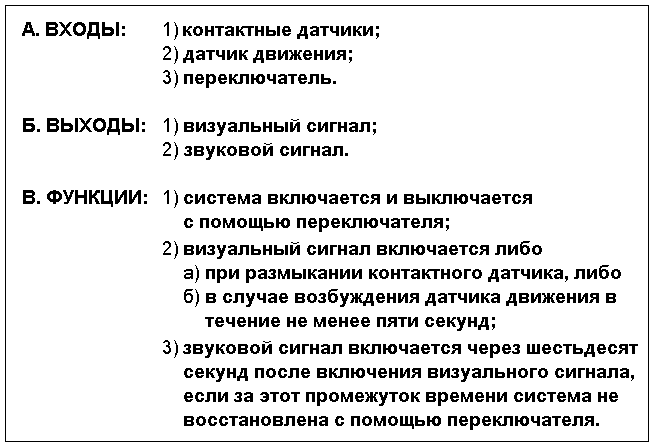
Рис.3.3. Функциональная спецификация системы охранной сигнализации
Глава 4. Основы проектирования приборов
Основой для проектирования прибора является техническое задание (ТЗ), составленное разработчиком системы управления или контроля, в составе которой должен работать проектируемый прибор. ТЗ составляется исходя из задач, выполняемых системой. В ТЗ указывается назначение прибора, условия его эксплуатации, формулируются требования к его статическим и динамическим характеристикам, к точности и надежности, оговариваются требования к конструкции и внешнему оформлению прибора.
Перед проектированием прибора изучаются имеющиеся материалы по данной теме. Рассматривается техническая литература, посвященная физическим принципам, которые могут быть положены в основу схемы данного прибора, изучаются схемы и конструкции ранее разработанных приборов аналогичного назначения, оцениваются их достоинства и недостатки и определяется степень их соответствия техническим требованиям, оговоренным в ТЗ.
Далее разрабатывается схема прибора. Производится выбор метода получения первичной информации (выбор физического принципа и типа чувствительного элемента) и метода преобразования выходного сигнала чувствительного элемента в выходной сигнал прибора.
При этом определяются типы необходимых преобразующих элементов, формируются структурная и принципиальная схемы прибора. Производится выбор и теоретическое обоснование параметров схемы и конструкции прибора, для чего выполняются расчеты статических и динамических характеристик, точности и надежности прибора.
В результате этих расчетов должно быть доказано, что характеристики прибора, его точность и надежность будут соответствовать требованиям ТЗ. Если в какой-то части это условие не выполняется, то в ходе проектирования видоизменяют схему или отдельные ее элементы для получения желаемых результатов. Окончательное суждение о соответствии параметров прибора требованиям ТЗ выносится по результатам всесторонних экспериментальных исследований опытных образцов прибора.
При конструировании прибора разрабатывается общий вид конструкции и производятся необходимые расчеты деталей и узлов. Производится деталировка и выполняется анализ размерных цепей, на основании которого определяются технологические допуски на точность изготовления деталей. Исходя из условий работы прибора определяются требования к качеству обрабатываемых поверхностей, к покрытиям и т. п. После этого оформляется полный альбом чертежей, содержащий общие виды прибора и входящих в него сборочных единиц, электрические монтажные схемы, спецификации и чертежи деталей. Затем составляются технические условия (ТУ) на прибор и основные его узлы. После изготовления по чертежам опытных образцов последние подвергаются всесторонним испытаниям с целью определения соответствия их параметров требованиям ТУ и ТЗ.
Выбор чувствительного элемента
Первичная информация получается с помощью чувствительного элемента, непосредственно воспринимающего измеряемую величину Х и преобразующего ее в некоторый сигнал У1 другой физической природы, более удобный для дальнейших преобразований.
Для измерения некоторых физических величин существует по несколько чувствительных элементов, отличающихся принципами действия. Поэтому выбор типа чувствительного элемента связан с выбором физического принципа, на котором основано действие чувствительного элемента. (В название измерительного прибора часто вводят признак, характеризующий физический принцип работы чувствительного элемента, например: «термоэлектрический термометр»).
Каждому физическому принципу свойственна определенная зависимость выходного сигнала У1 от измеряемой величины Х, а также от некоторых побочных (дестабилизирующих) факторов:
У1 = f(X, z1, z2, ..., zn).
К числу факторов z1, z2, ..., zn могут относиться температура и давление окружающей среды, параметры режимов питания чувствительного элемента, линейные и угловые ускорения, магнитные и электрические поля и др.
При выборе физического принципа требования ТЗ по точности и надежности должны быть реализованы с наименьшими затратами (наиболее просто) и в минимальных габаритах. С этой целью сравнивают чувствительные элементы по следующим основным критериям:
1) принципиальная возможность работы чувствительного элемента в заданном диапазоне измерения;
2) однозначность характеристики и ее стабильность (воспроизводимость);
3) наименьшее влияние на выходной сигнал побочных факторов;
4) достаточно большая выходная мощность;
5) высокая надежность (с этой точки зрения желательно, чтобы чувствительный элемент не содержал подвижных деталей и скользящих или разрывных электрических контактов);
6) простота конструкции и малые габариты.
Обычно механические и электромеханические чувствительные элементы имеют подвижные части, связанные с опорами или направляющими. Выходной сигнал таких элементов подвержен влиянию различных вредных сил и моментов сил, обусловленных трением в опорах и направляющих, неуравновешенностью подвижной системы, которая проявляется особенно сильно при линейных ускорениях и вибрациях. Отсюда следует, что если сравниваются два чувствительных элемента (один электрический, другой механический), обеспечивающие преобразование сигналов в нужном диапазоне и обладающие близкими точностными и габаритно-весовыми характеристиками, то предпочтение следует отдать электрическому элементу, поскольку в нем отсутствуют подвижные части. Если же сравниваются два чувствительных элемента - один контактный, другой - бесконтактный, то при прочих равных условиях предпочтение отдается бесконтактному элементу.
Рассмотрим задачу измерения температуры в диапазоне от 0 до 150oC, для которой имеется семь видов чувствительных элементов: дилатометрический, биметаллический, жидкостный, газовый, парожидкостный, терморезисторный, термоэлектрический. Любой из перечисленных элементов может работать в заданном диапазоне температур, однако предпочтение следует отдать последним двум, основанным на чисто электрических принципах. Остается выбрать один из двух элементов и здесь преимущество на стороне терморезистора, поскольку термоэлектрические чувствительные элементы в рассматриваемом диапазоне температур развивают слишком малую термоэлектродвижущую силу.
Другой пример - измерение абсолютного давления в диапазоне от 800 до 6 мм рт. ст. Здесь также существует несколько видов чувствительных элементов: пьезорезисторный, тепловой, электронный, газоразрядный, радиоактивный, упругий (мембрана, сильфон, трубчатая пружина). Пьезорезисторный элемент работает в области очень высоких давлений, следующие три элемента - в области очень низких давлений.
Остаются для выбора два чувствительных элемента, способные работать в заданном диапазоне: радиоактивный элемент - электрический и упругий элемент - механический. Радиоактивный элемент имеет слишком слабый сигнал - выходной ток равен 10-9-10-16 А и его трудно измерить с высокой точностью. В данном случае наиболее приемлем механический (упругий) элемент, выходным сигналом которого может служить одна из двух величин - упругая деформация или сила.
При решении некоторых задач можно встретиться со случаями, когда отсутствуют чувствительные элементы, позволяющие осуществить нужное преобразование, или когда применение существующих элементов приводит к слишком грубым или громоздким решениям. В этих случаях можно прибегнуть к методу косвенных измерений, при котором чувствительный элемент воспринимает не измеряемую величину Х, а некоторую другую величину Х1, связанную с Х известной функциональной зависимостью
Х1 = f1(Х). (4.1)
Уравнение (4.1) является уравнением метода измерения. Чувствительный элемент преобразует величину Х1 в некоторый сигнал У1
У1 = f2(Х1). (4.2)
Уравнение (4.2) является характеристикой чувствительного элемента. По уравнениям (4.1) и (4.2) нетрудно найти зависимость У1 от Х
У1 = f2[f1(X)] = f(X).
Примером прибора, основанного на методе косвенных измерений, служит барометрический высотомер, в котором в качестве уравнения метода измерения используется известная функциональная зависимость атмосферного давления P от высоты полета H. В интервале высот от 0 до 11 км зависимость H от P выражается формулой
 Н=
Н= ,
,здесь H - высота полета, м; PH - абсолютное давление на высоте полета, н/м2; P0 - абсолютное давление у поверхности Земли; - температурный градиент ( = 0.0065 град/м); R - газовая постоянная (R = 29.27 м/град); T0 - абсолютная температура у поверхности Земли (T = 273 + toC).
При градуировке прибора параметры P0, T0, и R считают постоянными.
Встречаются случаи, когда метод косвенных измерений дает зависимость измеряемой величины Х не от одной, а от нескольких независимых переменных Х1, ..., Хk, каждая из которых может быть измерена своим чувствительным элементом.
Например, для указателя истинной воздушной скорости уравнение метода измерения имеет вид
V=
 ,
,здесь g - ускорение силы тяжести (g = 9.81 м/с2); T - абсолютная температура на высоте полета; k - отношение теплоемкостей воздуха при постоянном давлении и постоянном объеме (k = 1.4); Pд - динамическое давление; V - истинная воздушная скорость.
Измеряя T, Pд и PH с помощью трех чувствительных элементов, можно определить V, считая параметры g, R, k постоянными.
Существуют измерительные информационные системы, в которых измеряемые величины являются функциями еще большего количества независимых переменных, каждая из которых измеряется своим чувствительным элементом. Например, бесплатформенная инерциальная навигационная система содержит шесть чувствительных элементов (три акселерометра и три гироскопа). Получая информацию от этих чувствительных элементов, цифровой вычислитель решает известные уравнения и определяет широту и долготу местоположения летательного аппарата, а также ряд других навигационных параметров.
Выбор метода измерения и формирование структурной схемы
Если прибор служит в качестве измерительного устройства с визуальным отсчетом, то его выходным сигналом должно быть угловое (линейное) перемещение стрелочного указателя или показания цифрового отсчетного устройства. В простейшем случае выходной сигнал чувствительного элемента служит выходным сигналом прибора. Примером является биметаллический термометр. При изменении температуры биметаллическая спираль вместе со стрелкой закручивается на достаточно большой угол, поддающийся непосредственному отсчету по шкале прибора.
Однако в большинстве измерительных приборов приходится применять дополнительные преобразователи для превращения выходного сигнала чувствительного элемента в достаточно большое перемещение стрелочного указателя или цифровой код управления электронным индикатором.
Если прибор выполняет функции датчика в системе автоматического управления или контроля, то в простейшем случае сам чувствительный элемент и является таким датчиком (термосопротивление, термопара). Сложные датчики, кроме чувствительного элемента, содержат и другие преобразователи, изменяющие род физической величины (например, механическое перемещение в электрический сигнал) и масштаб выходного сигнала, или функциональную зависимость между входным и выходным сигналами.
Наиболее распространены два метода преобразования выходного сигнала чувствительного элемента У1 в выходной сигнал датчика У нужной формы и масштаба: метод последовательного преобразования и компенсационный метод.
В методе последовательного преобразования сигнал У1 преобразуется в другой сигнал У2, затем сигнал У2 преобразуется в У3 и т. д.; в конечном счете, получается выходной сигнал У. Вид и количество преобразований зависят от типа чувствительного элемента и от требований к форме и масштабу выходного сигнала У.
В компенсационном методе сигнал У1 уравновешивается другим сигналом У0, создаваемым с помощью так называемого обратного преобразователя. Компенсационный метод может сочетаться с методом последовательного преобразования, например сигнал У1 преобразуется в У2, а уже затем сигнал У2 уравновешивается сигналом У0 обратного преобразователя.
Различие между указанными методами можно проиллюстрировать с помощью структурной схемы. Структурная схема прибора является отображением его принципиальной схемы и дает представление о видах и порядке физических преобразований, осуществляемых данным прибором в процессе измерения. Каждый вид преобразования условно изображается на структурной схеме отдельным звеном, являющимся элементарным преобразователем физических величин. При использовании метода косвенных измерений преобразование, отвечающее данному методу, отображается на структурной схеме в виде специального звена. Чтобы определить статическую характеристику прибора, необходимо определить статические характеристики всех его звеньев. Расчет характеристик звеньев ведется на основе анализа физических принципов их работы.
Звенья могут соединяться между собой одним из трех типовых способов: последовательно (рис.4.1,а) параллельно (рис.4.1,б) и встречно-параллельно (рис.4.1,в).
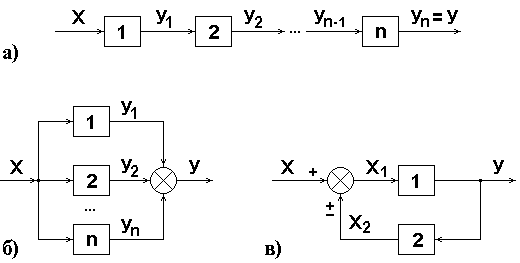
Рис.4.1. Типовые соединения звеньев: а) последовательное;
б) параллельное; в) встречно-параллельное; 1, 2,...n – звенья
Для встречно-параллельного соединения (рис.4.1,в) звено 2, расположенное во встречной цепи, называют обратным преобразователем. Выходной сигнал X2 обратного преобразователя может суммироваться с входным сигналом Х с тем же знаком (положительная обратная связь) или с обратным знаком (отрицательная обратная связь).
Схемы, в которых звенья соединены последовательно или параллельно, являются разомкнутыми; схема со встречно-параллельным соединением является замкнутой. В общем случае структурная схема прибора может содержать различные виды соединений звеньев и быть замкнутой не полностью, а на отдельных участках.
Рассмотрим особенности структурных схем, отображающих описанные выше методы преобразования сигналов. Методу последовательного преобразования отвечает разомкнутая структурная схема (рис.4.1,а), где звено 1 с выходным сигналом У1 является чувствительным элементом, а остальные звенья 2, 3, ..., n - дополнительные преобразующие элементы.
Примером прибора с последовательным преобразованием сигналов служит термоэлектрический термометр. Структурная схема прибора (рис.4.2) содержит четыре последовательно соединенных звена: 1 - термопара (преобразует температуру в термоЭДС е); 2 - электрическая цепь (преобразует термоЭДС е в силу тока I); 3 - магнитоэлектрический измерительный механизм (преобразует силу тока I во вращающий момент М); 4 - упругая подвижная система (преобразует момент М в угловое перемещение , являющееся выходным сигналом прибора).

Рис.4.2. Структурная схема термоэлектрического термометра
Другим примером измерительного прибора, построенного по методу последовательного преобразования сигналов, является барометрический высотомер (рис.4.3).

Рис.4.3. Структурная схема барометрического высотомера
В структурной схеме высотомера перед чувствительным элементом 2 включено условное звено 1, отображающее преобразование высоты H в давление P1 в соответствии с уравнениями, лежащими в основе метода косвенного измерения высоты. Чувствительным элементом 2 служит анероидная коробка, преобразующая давление P1 в линейное перемещение s, которое затем преобразуется в угловое перемещение с помощью шатунно-кривошипной передачи (звено 3), связанной с указателем. Угол служит выходным сигналом прибора.
Структурная схема прибора, построенного по компенсационному методу, приведена на рис.4.4, которая является замкнутой на участке между выходом чувствительного элемента У1 и выходом прибора У.
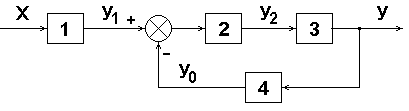
Рис.4.4. Структурная схема прибора, построенного
по компенсационному методу
Замыкание схемы осуществляется на входе звена 2 с помощью отрицательной обратной связи (выходной сигнал У0 обратного преобразователя подается на вход звена 2 с обратным знаком). На схеме звено 1 отображает чувствительный элемент, звено 2 - нуль-орган, звено 3 - интегрирующий элемент, звено 4 - обратный преобразователь. Нуль-орган 2 вырабатывает сигнал У2, пропорциональный разности (У1 - У0) с соответствующим знаком, а интегрирующий элемент 3 осуществляет интегрирование У2 и наращивает выходной сигнал У, а вместе с ним (через обратный преобразователь) и сигнал обратной связи У0 до тех пор, пока разность (У1 - У0) не станет равной нулю; при этом система приходит в состояние равновесия.
Если известна статическая характеристика обратного преобразователя У0 = f0(У), то для положения равновесия (когда У0 = У1) можно записать
У1 = f0(У) или У = 0(У1),
где 0 - функция, обратная f0.
Зная характеристику чувствительного элемента У1 = f1(X), нетрудно найти характеристику всего прибора:
У = 0[f1(X)].
Примером прибора, построенного по компенсационному методу измерения, является электроемкостный топливомер (рис.4.5).
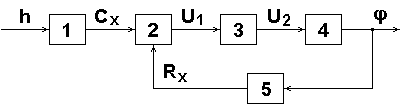
Рис.4.5. Структурная схема электроемкостного топливомера
Чувствительным элементом служит погруженный в бак с топливом конденсатор (звено 1), емкость которого Cx зависит от высоты h уровня топлива. Нуль-органом (звено 2) служит мостовая электроизмерительная схема. Выходное напряжение U1 мостовой схемы усиливается усилителем переменного тока (звено 3).
Роль интегрирующего элемента (звено 4) выполняет электродвигатель, на вход которого подается напряжение U2. Обратным преобразователем является потенциометр (звено 5), движок которого связан через редуктор с электродвигателем.
Емкость чувствительного элемента Cx и сопротивление Rx потенциометра образуют два переменных плеча мостовой схемы (два других плеча R0 и C0 - постоянные величины). Данная схема имеет некоторое отличие от рассмотренной выше: нулевой сигнал на выходе нуль-органа имеет место не при равенстве сигналов чувствительного элемента и обратного преобразователя, а при соблюдении условия равновесия мостовой схемы. Выходным сигналом прибора служит угол поворота выходной оси редуктора и связанной с ним стрелки указателя.
В результате сравнения метода последовательного преобразования сигналов с компенсационным методом можно сделать вывод, что схема метода последовательного преобразования проще. Однако с помощью компенсационного метода может быть получена более высокая точность, так как в условие равновесия системы практически не входят параметры всех остальных преобразующих элементов, кроме чувствительного элемента и обратного преобразователя. Поэтому в тех случаях, когда не требуется очень высокая точность измерения, используют метод последовательного преобразования и строят прибор по разомкнутой структуре. В точных приборах применяют компенсационный метод и структурную схему делают замкнутой.
Практически приборы с погрешностями, превышающими 1% от диапазона измерения, строят по методу последовательного преобразования сигналов; приборы с погрешностями менее 0.1% строят по компенсационному методу; в приборах с погрешностями от 0.1 до 1% используют как тот, так и другой методы.
Принципы конструирования приборов
При конструировании приборов широко используются нормализованные детали (винты, гайки, шайбы и др.), радиоэлектронные элементы (резисторы, конденсаторы, диоды, транзисторы, интегральные микросхемы и др.), узлы и готовые изделия (шарикоподшипники, электродвигатели, зубчатые редукторы, штепсельные разъемы и др.). Выбор нормализованных изделий производится из действующих нормалей, каталогов, стандартов. Применение нормализованных деталей и узлов сокращает время разработки, удешевляет прибор и повышает его надежность, поскольку освоенные в крупносерийном производстве нормализованные детали и узлы имеют более высокое качество, чем специальные, выпускаемые малыми партиями.
Эффективным средством повышения качества приборов и их удешевления является широкая унификация их конструкций. Унифицированные приборы, благодаря их крупносерийному и массовому выпуску, лучше отработаны, в результате чего они более надежны и дешевы, чем приборы узкого применения. Унификация конструкций приборов осуществляется в следующем порядке. В начале производится сбор исходных данных у возможных потребителей приборов с целью выяснения необходимых диапазонов измерения, характеристик, точности, срока службы и условий эксплуатации. После этого разрабатывается и согласовывается со всеми потребителями ТЗ на проектирование унифицированного прибора. В ТЗ определяется минимальное число типоразмеров или модификаций прибора, отличающихся диапазонами измерения и классами точности и обеспечивающих выполнение требований всех потребителей.
В процессе конструирования прибора нужно стремиться к тому, чтобы все модификации имели по возможности единую конструкцию, а переход от одного диапазона измерения к другому (или от одного класса точности к другому) сопровождался минимальными изменениями, например, заменой какого-то одного узла или нескольких деталей. Эффект от унификации тем больше, чем на более высоком уровне она проводится. Унификация информационно-измерительной системы приводит к значительно большему выигрышу в качестве изделия и его стоимости, чем унификация отдельного прибора или датчика.
Чем выше уровень унификации, тем труднее выполнить технические требования. Например, к навигационным системам, предназначенным для применения на легких самолетах, предъявляются очень жесткие требования в части габаритно-весовых характеристик, но в то же время требования к точности менее жесткие по сравнению с системами, предназначенными для тяжелых самолетов. Если ставится задача создания унифицированной навигационной системы, которая может быть применима на всех самолетах (легких и тяжелых), то такая система должна иметь минимальные габариты и массу, отвечающие требованиям для легких самолетов, и в то же время обладать наивысшей точностью, удовлетворяющей требованиям для тяжелых самолетов.
Снижение габаритных размеров и массы унифицированных систем расширяет область их применения. Большое значение для создания унифицированных приборов имеет применение микроэлектроники с высокой степенью интеграции. При этом уменьшаются размеры и масса прибора, повышается надежность, снижается стоимость. Наибольший выигрыш в объеме конструкции дают большие интегральные схемы.