
Ю. а семёнов курсовой проект исследование
| Вид материала | Курсовой проект |
СодержаниеСписок литературы |
- Курсовой проект по учебной дисциплине «Микропроцессорные средства» на тему «Система, 521.9kb.
- Оформление результатов проектирования курсовой проект, 64.91kb.
- 1. Порядок выполнения курсового проекта, 761.28kb.
- + Курсовой проект + диск + защита, 35.88kb.
- Курсовой проект по дисциплине «Холодильные машины и установки» проект распредилительного, 43.46kb.
- Курсовой проект по дисциплине "Организация эвм, комплексов и систем", 549.85kb.
- Требования к курсовой работе по гигиене, 67.76kb.
- Курсовой проект по дисциплине "Схемотехника эвм", 121.85kb.
- Курсовой проект по курсу «Технология программирования», 147.33kb.
- Реферат Курсовой проект состоит из графической части схема производства hno, 420.6kb.
Курсовой проект «Исследование промышленного робота»
УДК 681.5
Н.С. СЕМЁНОВА, Ю.А СЕМЁНОВ
КУРСОВОЙ ПРОЕКТ
«ИССЛЕДОВАНИЕ ПРОМЫШЛЕННОГО РОБОТА»
Современное машиностроение имеет дело с машинами двух типов: цикловыми машинами и машинами с программным управлением, причём последние получают всё большее распространение.
Станки с программным управлением, промышленные роботы, современные транспортные системы, позиционирующие платформы и др. немыслимы без механизмов с несколькими степенями подвижности и систем автоматического управления.
По нашему мнению, курс ТММ должен быть ориентирован на более широкую номенклатуру машин, включающую механизмы со многими степенями подвижности и системы управления их движением. Множество современных машин (промышленные роботы, подъёмно-транспортные машины и т.д.) работают в переходных процессах, исследование которых существенно отличается от анализа установившегося движения однодвигательной цикловой машины. Учитывая это, кафедра ТММ Санкт-Петербургского государственного политехнического университета (СПбГПУ) провела модернизацию курса в соответствии с требованиями современного машиностроения (модернизированный ТММ можно найти в
 ).
).Основой самостоятельной работы студентов является курсовой проект по исследованию и проектированию машин. В предлагаемой статье рассмотрено курсовое проектирование промышленных роботов, проводимое для ряда специальностей в рамках дисциплины «Теория механизмов и машин» в СПбГПУ. Рассмотрим выполнение проекта по этапам.
Техническое задание проекта включает в себя кинематическую схему робота с заданными размерами (рис. 1), диапазон линейных и угловых перемещений исполнительных звеньев, программный закон движения на участке позиционирования и описание рабочего процесса.
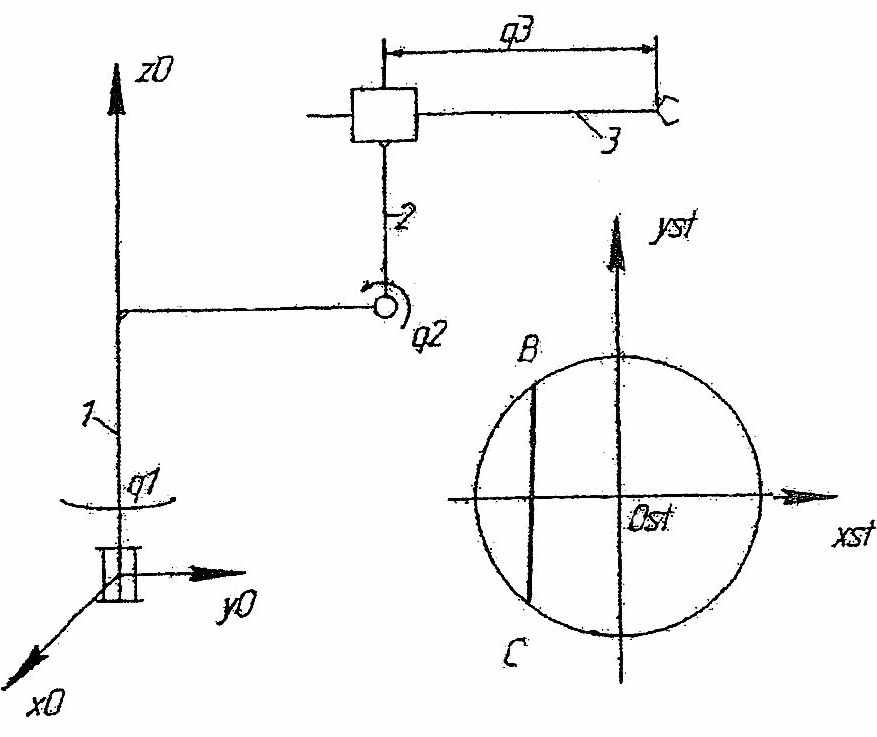 |  |
| Рис. 1 | Рис. 2 |
Пример описания рабочего процесса: в начальный момент времени полюс схвата находится в некоторой точке
 рабочей зоны; за определённое время t2 он должен подойти к столу, вращающемуся вокруг неподвижной оси с угловой скоростью
рабочей зоны; за определённое время t2 он должен подойти к столу, вращающемуся вокруг неподвижной оси с угловой скоростью  и провести по столу прямую
и провести по столу прямую  с определенной скоростью
с определенной скоростью  . В общем случае необходимо провести линию любой заданной формы по детали, находящейся на вращающемся столе, по поступательно движущейся ленте транспортёра, по стене и т. п.
. В общем случае необходимо провести линию любой заданной формы по детали, находящейся на вращающемся столе, по поступательно движущейся ленте транспортёра, по стене и т. п.В процессе проектирования студент должен для «жёсткой» модели робота провести геометрическое и кинематическое исследование, включающее решение прямой и обратной задач, силовой расчёт робота и определить геометрические, кинематические и динамические ошибки отработки заданной траектории, влияющие на точность позиционирования схвата. Затем производится построение упругой модели робота, оцениваются статические ошибки схвата для некоторых конфигураций робота, определяются собственные частоты и формы, позволяющие оценить колебания, возникающие в процессе позиционирования.
На первом этапе по заданным геометрическим и кинематическим параметрам робота строится рабочая зона – зона достижимости полюса схвата (рис. 2).
С учётом построенной рабочей зоны задают высоту рабочего стола и транспортёра, расстояния от осей неподвижной системы координат, связанной со стойкой робота, до геометрических осей вращающегося стола, движущейся ленты транспортёра, стены и др. Отметим, что рисунки, приведённые в данной статье, относятся к разным кинематическим схемам и рабочим процессам роботов.
Траектория полюса схвата представляет собой совокупность двух участков: участок
 соответствует фазе позиционирования, на участке решается траекторная задача или задача контурного управления. На первом участке осуществляется перевод схвата из одного положения в другое называемый задачей позиционного управления. Законы движения входных звеньев при этом имеют второстепенное значение, и требования к ним сводятся к обеспечению выполнения заданного перемещения за заданное время. В качестве программных могут быть использованы законы, рассматриваемые при проектировании кулачковых механизмов. Для получения требуемой траектории необходимо согласование законов движения звеньев робота. Это необходимо учитывать при решении траекторной задачи и задачи контурного управления.
соответствует фазе позиционирования, на участке решается траекторная задача или задача контурного управления. На первом участке осуществляется перевод схвата из одного положения в другое называемый задачей позиционного управления. Законы движения входных звеньев при этом имеют второстепенное значение, и требования к ним сводятся к обеспечению выполнения заданного перемещения за заданное время. В качестве программных могут быть использованы законы, рассматриваемые при проектировании кулачковых механизмов. Для получения требуемой траектории необходимо согласование законов движения звеньев робота. Это необходимо учитывать при решении траекторной задачи и задачи контурного управления.Вторым этапом исследования робота является решение прямой и обратной геометрической задачи. При решении прямой геометрической задачи определяются линейные и угловые координаты схвата в зависимости от входных координат. Методика решения этой задачи изложена в
 .
.Из полученных уравнений геометрического анализа несложно определить входные координаты в зависимости от выходных координат, т.е. в общем виде решить обратную геометрическую задачу, необходимую для построения требуемых траекторий полюса схвата. Следует отметить, что обратная задача имеет решение, если заданное число
 выходных координат робота совпадает с числом
выходных координат робота совпадает с числом  входных координат. Если
входных координат. Если  , то решение обратной задачи в общем случае отсутствует. Его можно получить, если задать не все
, то решение обратной задачи в общем случае отсутствует. Его можно получить, если задать не все  выходных координат, а не более из них. В процессе решения обратной геометрической задачи приходится осуществлять различные преобразования, которые приводят к уравнениям, являющимся следствием исходных уравнений. Уравнениям-следствиям удовлетворяют корни исходной системы уравнений, а также посторонние корни. Чтобы выявить посторонние корни, обычно все найденные корни уравнений-следствий проверяют подстановкой в исходные уравнения. Уравнения имеют, как правило, несколько действительных решений, из которых необходимо выделить одно – в каком-то смысле наилучшее. На рис. 3 показана блок-схема решения обратной геометрической задачи. Цветом выделено основное решение задачи.
выходных координат, а не более из них. В процессе решения обратной геометрической задачи приходится осуществлять различные преобразования, которые приводят к уравнениям, являющимся следствием исходных уравнений. Уравнениям-следствиям удовлетворяют корни исходной системы уравнений, а также посторонние корни. Чтобы выявить посторонние корни, обычно все найденные корни уравнений-следствий проверяют подстановкой в исходные уравнения. Уравнения имеют, как правило, несколько действительных решений, из которых необходимо выделить одно – в каком-то смысле наилучшее. На рис. 3 показана блок-схема решения обратной геометрической задачи. Цветом выделено основное решение задачи.На участке контурного управления
требуемая траектория полюса схвата задаётся параметрическими уравнениями в системе координат стола, транспортёра, стены и др. 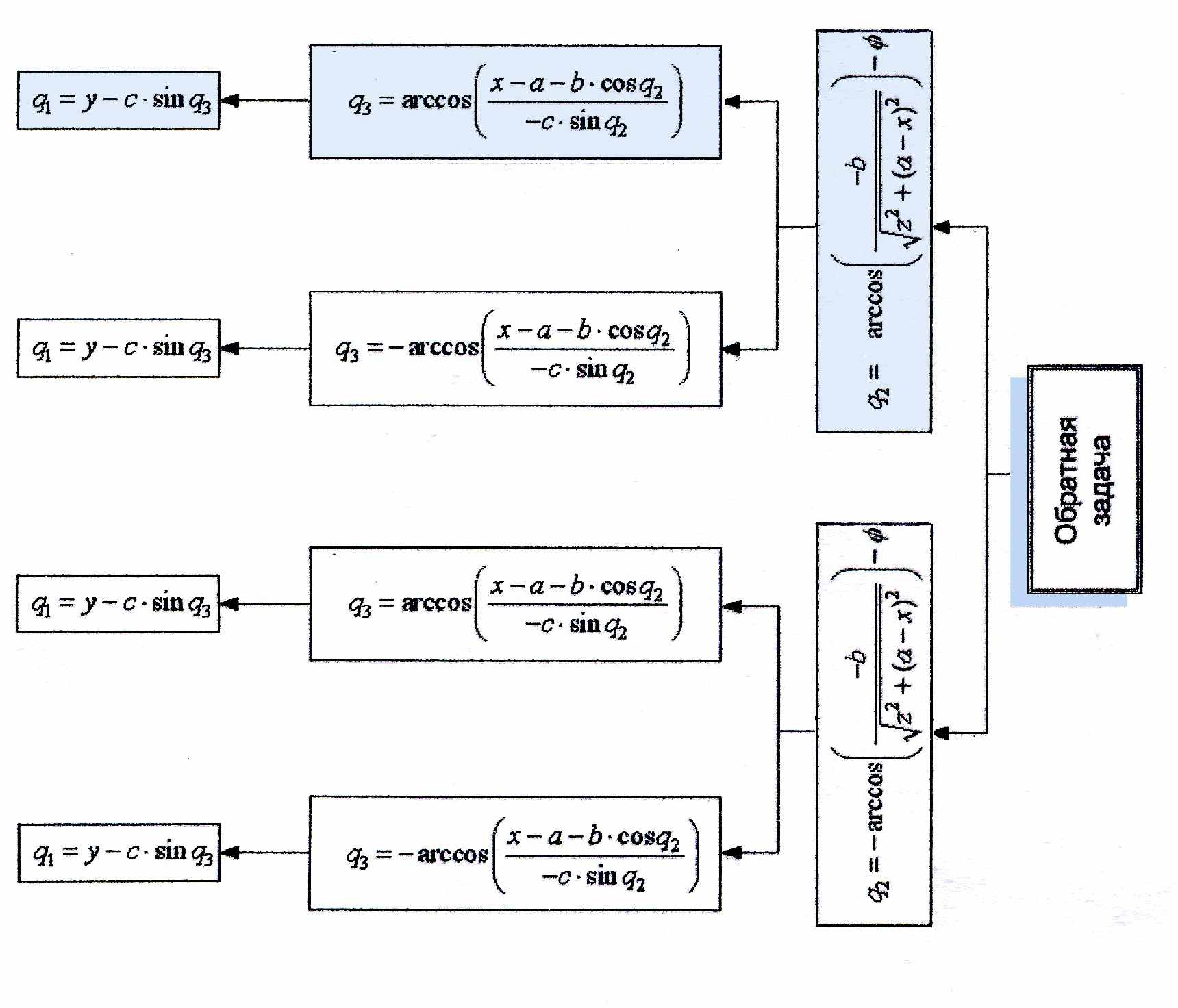 |
| Рис. 3 |
В качестве примера запишем параметрические уравнения для прямой
, показанной на рис. 4, в системе координат стола ( ):
):  | (1) |
где
 – радиус стола,
– радиус стола,  – скорость движения полюса схвата по заданной кривой,
– скорость движения полюса схвата по заданной кривой,  – время позиционирования.
– время позиционирования.На участке контурного управления
определяются координаты полюса схвата  в неподвижной системе координат, связанной с роботом:
в неподвижной системе координат, связанной с роботом:  , , | (2) |
 , , | (3) |
где
 – матрица перехода от стола к неподвижной системе координат, – угловая скорость вращения стола,
– матрица перехода от стола к неподвижной системе координат, – угловая скорость вращения стола,  – координаты центра стола в неподвижной системе координат.
– координаты центра стола в неподвижной системе координат. 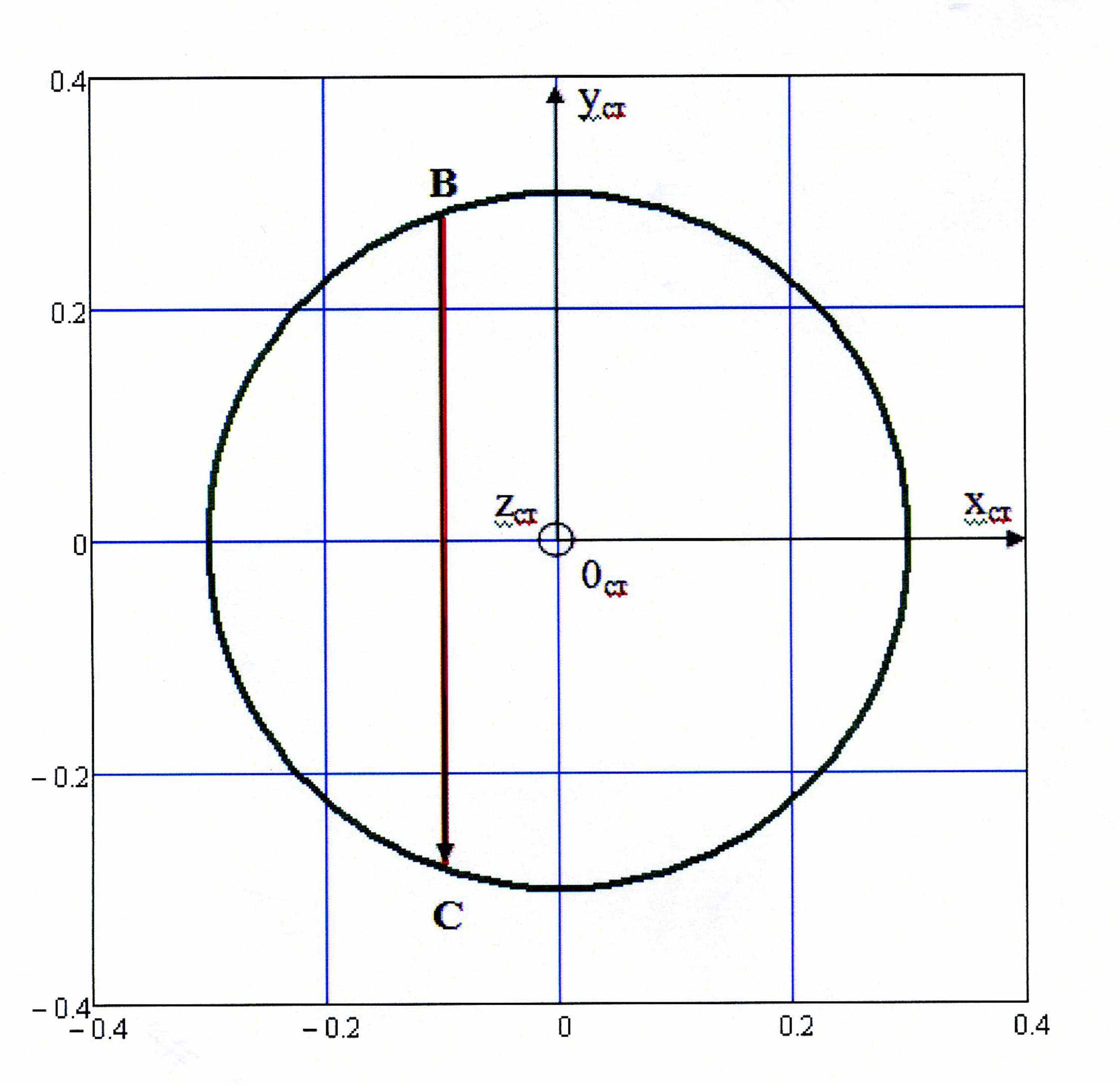 |
| Рис. 4 |
Полученные выше координаты полюса схвата
 подставляются в основное решений обратной геометрической задачи, тем самым определяются входные (обобщённые) координаты робота в функции времени
подставляются в основное решений обратной геометрической задачи, тем самым определяются входные (обобщённые) координаты робота в функции времени  и обобщённые скорости
и обобщённые скорости  , где
, где  .
.В дальнейшем решается обратная геометрическая задача на участке позиционирования. Для этого законы движения
 , заданные в техническом задании, записываются в виде единого аналитического выражения. В качестве примера запишем программный закон движения, изображенный на рис. 5:
, заданные в техническом задании, записываются в виде единого аналитического выражения. В качестве примера запишем программный закон движения, изображенный на рис. 5: 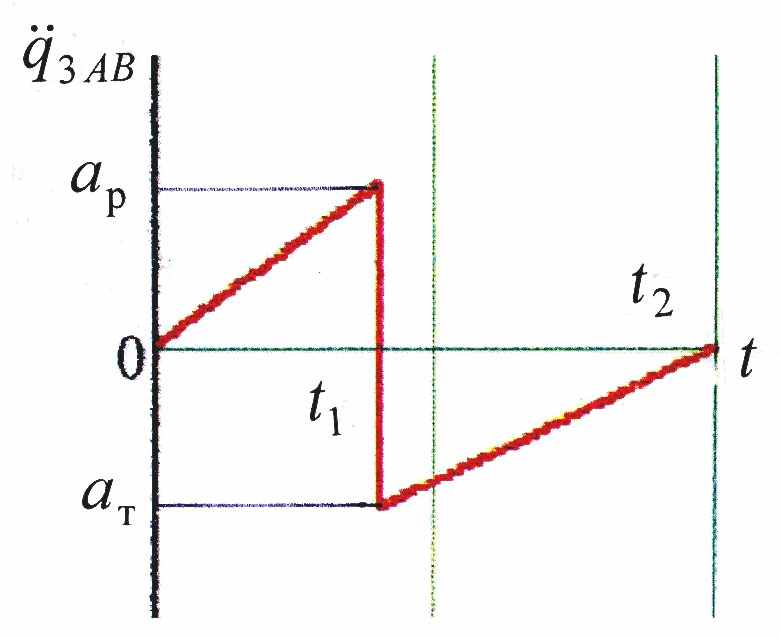 |
| Рис. 5 |
 , , | (4) |
где
 – единичная функция,
– единичная функция,  и
и  – максимальные программные ускорения на участке разбега и торможения,
– максимальные программные ускорения на участке разбега и торможения,  и – время окончания процесса разбега и торможения.
и – время окончания процесса разбега и торможения. Техническое задание робота требует, чтобы схват «мягко» коснулся стола, транспортёра, стены и т.п. Этим требованиям отвечают начальные и граничные условия, учитываемые при интегрировании законов движения.
Для каждого привода строятся графики изменения
 , т.е. графики изменения входных координат и их производных; на рис. 6 показаны графики изменения входных координат звена, связанного со схватом.
, т.е. графики изменения входных координат и их производных; на рис. 6 показаны графики изменения входных координат звена, связанного со схватом. 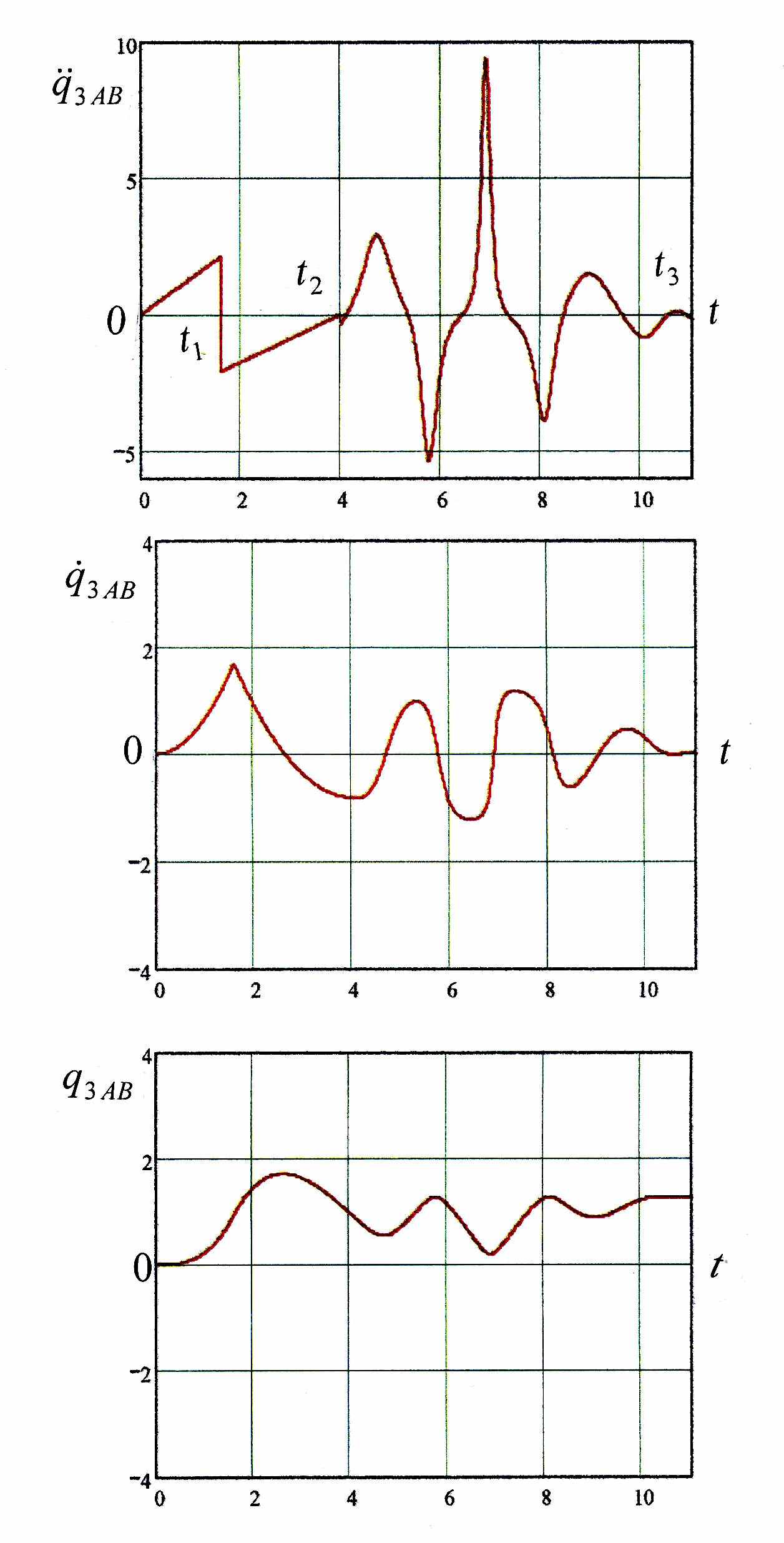 |
| Рис. 6 |
После определения входных координат как функций времени решается прямая геометрическая задача и строится пространственная траектория полюса схвата, а также её проекция на плоскость стола (рис. 7 и рис. 8) в неподвижной системе координат.
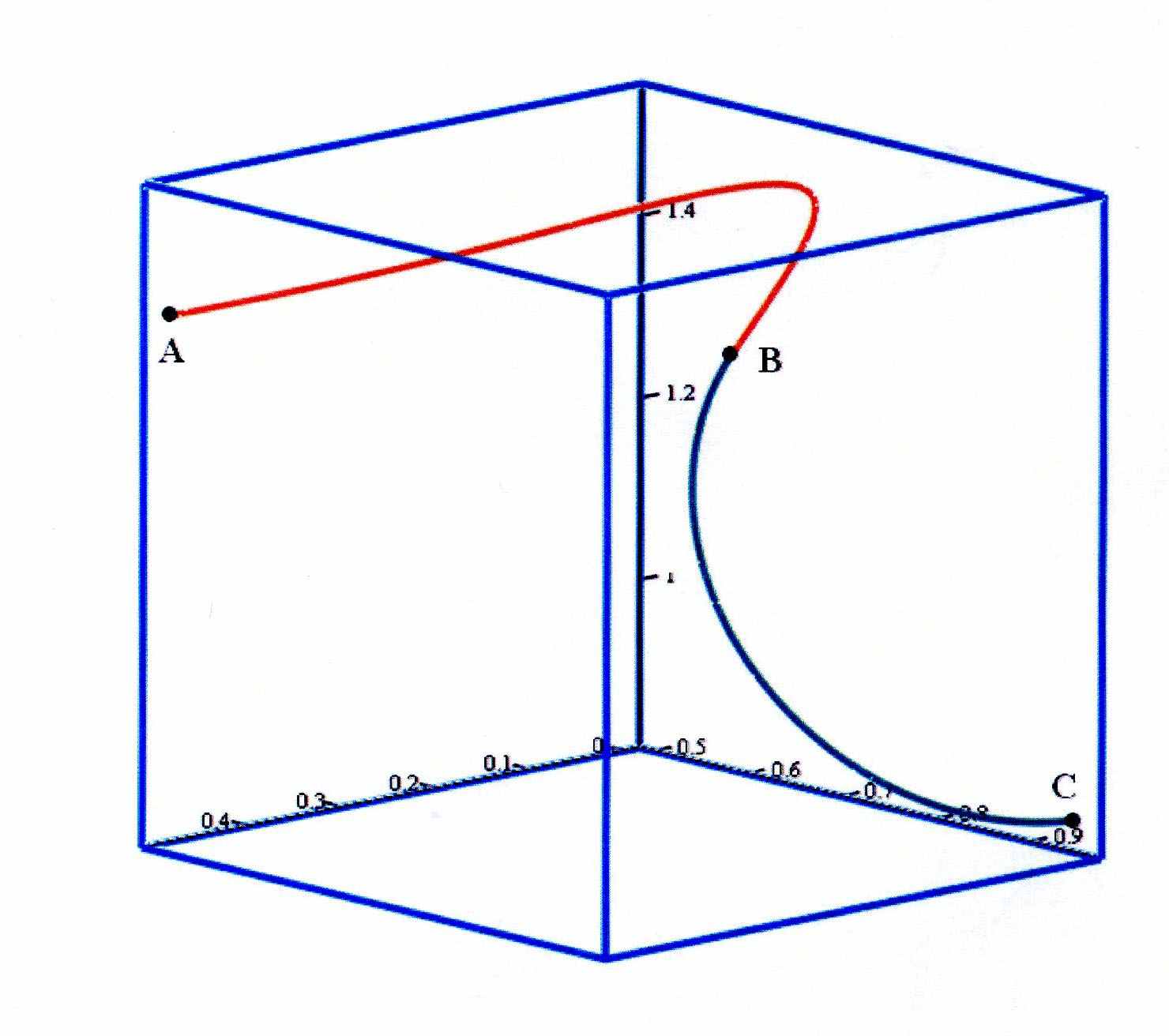 | 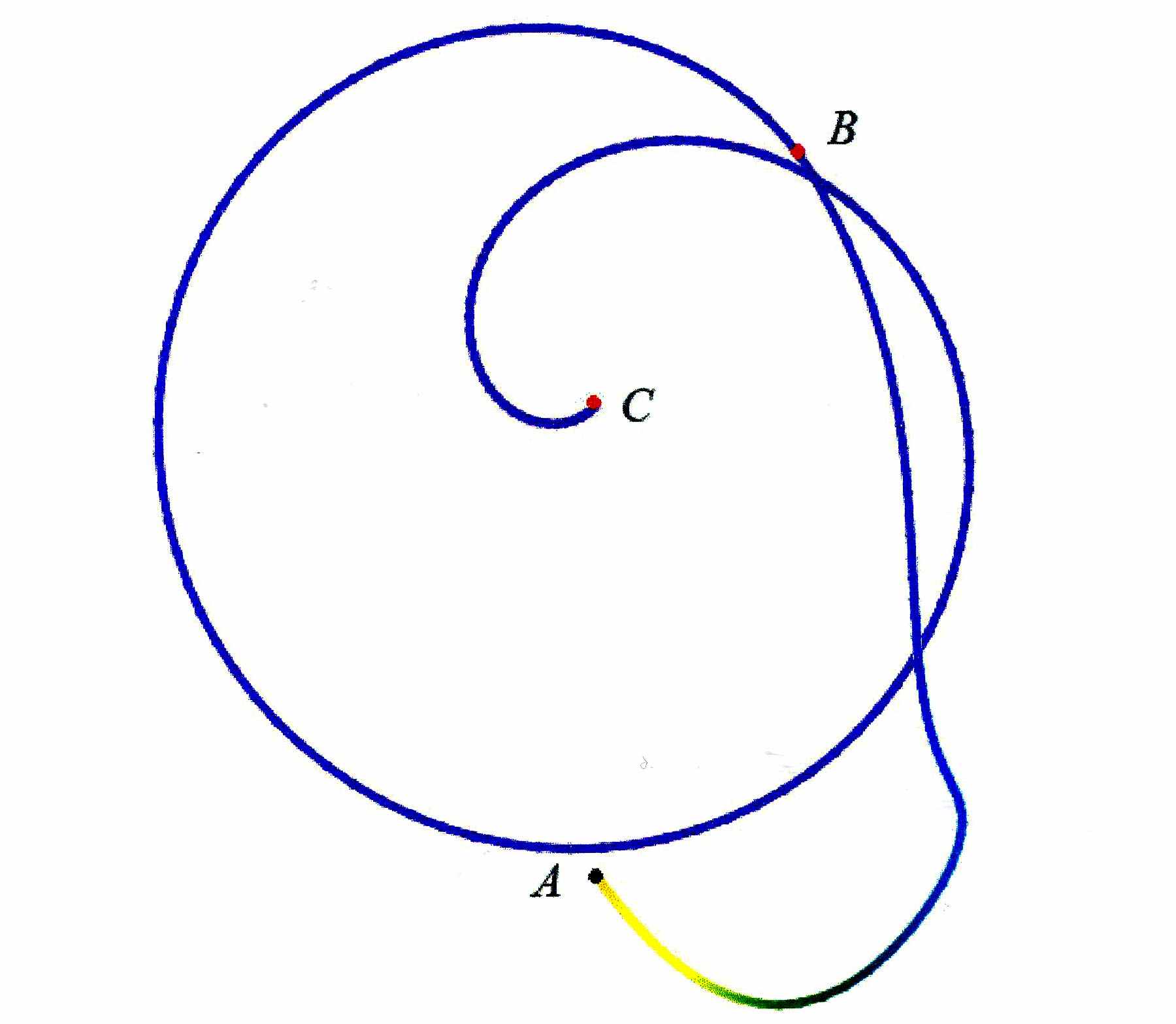 |
| Рис. 7 | Рис. 8 |
На этапе кинематического исследования определяются абсолютные угловые скорости
 и угловые ускорения
и угловые ускорения  звеньев, а также скорости
звеньев, а также скорости  и ускорения
и ускорения  их точек:
их точек:  , , | (5) |
 | (6) |
 , , | (7) |
 , , | (8) |
где
 и
и  – относительные угловые скорости и ускорения звеньев; в курсовом проекте
– относительные угловые скорости и ускорения звеньев; в курсовом проекте  .
.Формулы (5)-(8) являются рекуррентными соотношениями, позволяющими последовательно, шаг за шагом, вычислять кинематические параметры всех исполнительных звеньев механизма робота, начиная с первого, в проекциях на оси локальных систем, жёстко связанных с ними.
Подобным же образом определяются кинематические параметры звеньев передаточных механизмов; при этом учитываются переносные движения исполнительных звеньев.
Далее осуществляется конструкторская компоновка робота (рис. 9-10), вычисляются массы звеньев и составляются тензоры инерции
 подвижных звеньев относительно центров масс
подвижных звеньев относительно центров масс  .
. 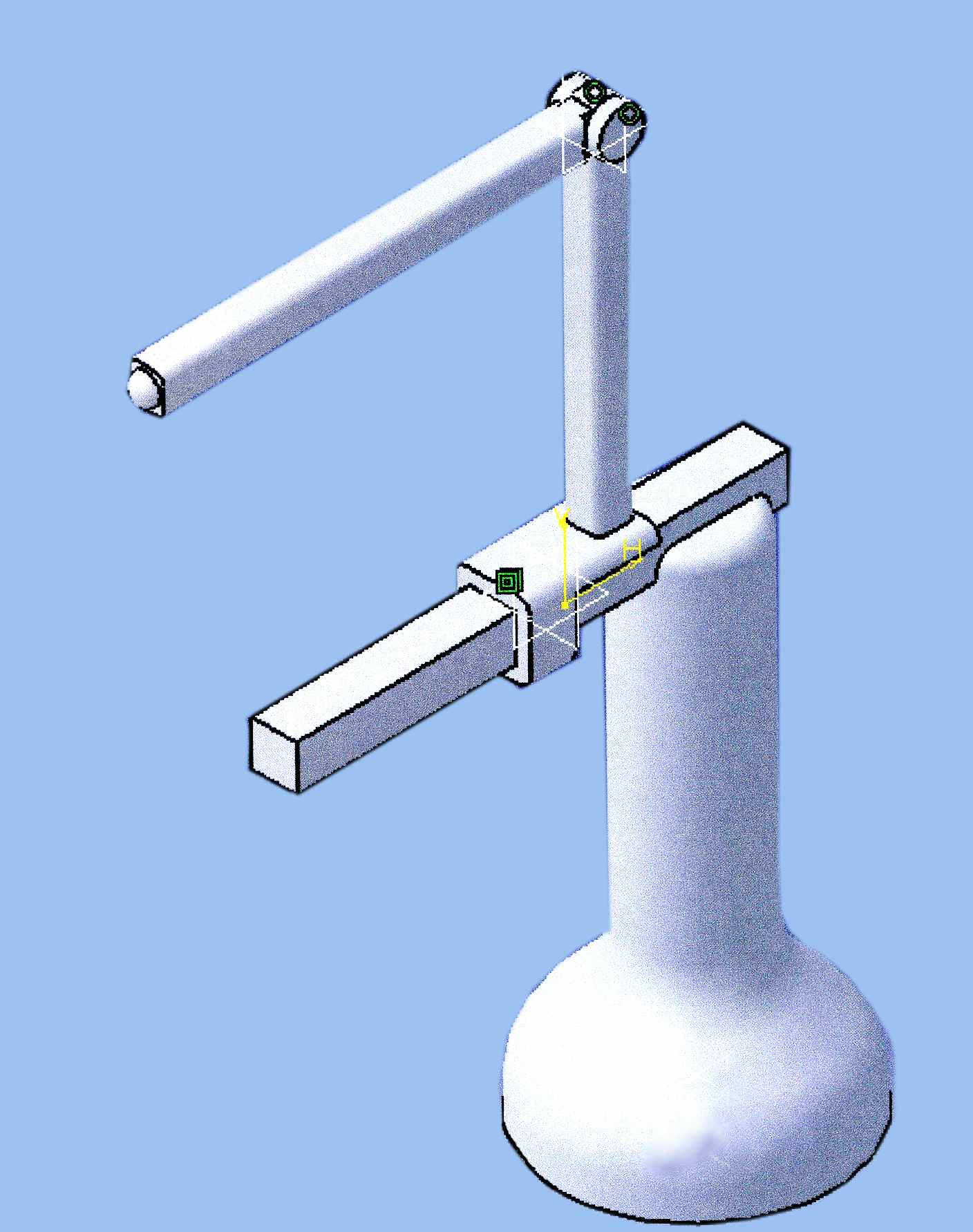 | 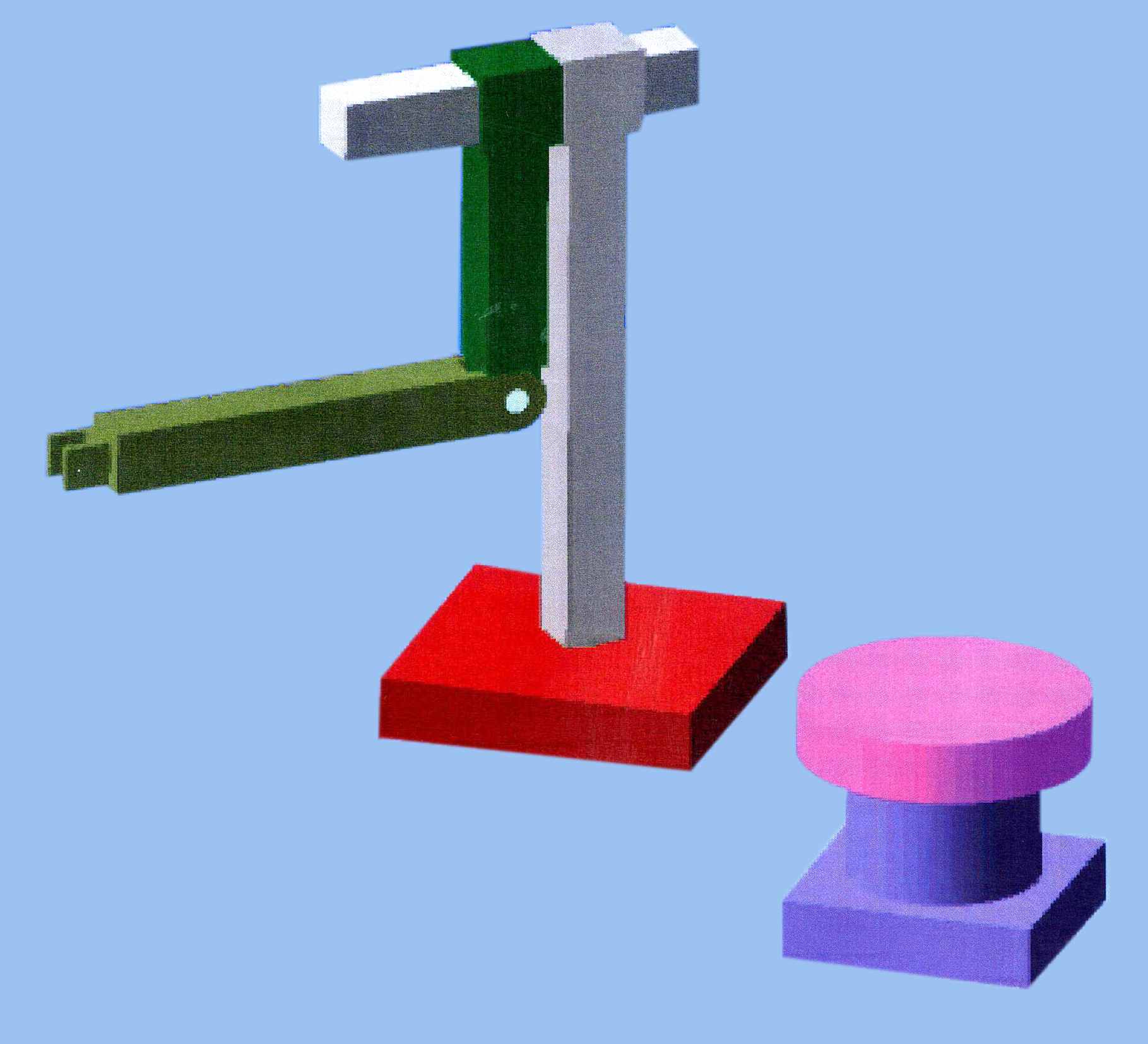 |
| Рис. 9 | Рис. 10 |
Затем производится силовой расчет робота. Для этого определяются главные векторы
 и главные моменты
и главные моменты  сил инерции каждого исполнительного звена:
сил инерции каждого исполнительного звена:  , , | (9) |
 . . | (10) |
Силы инерции передаточных звеньев определяются по аналогичным формулам с учётом переносных движений исполнительных звеньев.
Кинетостатический расчёт механизма робота, имеющего структуру «дерева», производится по исполнительным звеньям, являющимися структурными группами Коловского1. Неизвестные реакции
 ,
, ,
, и обобщённую движущую силу
и обобщённую движущую силу  , которые возникают в кинематической паре, связывающей s-е и (s – 1)-е звенья, можно привести к главному вектору и главному моменту сил взаимодействия
, которые возникают в кинематической паре, связывающей s-е и (s – 1)-е звенья, можно привести к главному вектору и главному моменту сил взаимодействия  :
:  | (11) |
Уравнения кинетостатики для
 -го звена записываются в рекуррентном виде:
-го звена записываются в рекуррентном виде:  | (12) |
где
 ,
,  ,
,  ,
,  – главные векторы и главные моменты сил тяжести и сил инерции исполнительных звеньев и звеньев тех передаточных механизмов, для которых s-ое звено является «стойкой»;
– главные векторы и главные моменты сил тяжести и сил инерции исполнительных звеньев и звеньев тех передаточных механизмов, для которых s-ое звено является «стойкой»;  ,
,  – главный вектор и главный момент сил взаимодействия s-го и (s + 1)-го звеньев. Строятся графики обобщённых движущих сил; на рис. 11 показан график изменения движущего момента выходного звена робота.
– главный вектор и главный момент сил взаимодействия s-го и (s + 1)-го звеньев. Строятся графики обобщённых движущих сил; на рис. 11 показан график изменения движущего момента выходного звена робота. 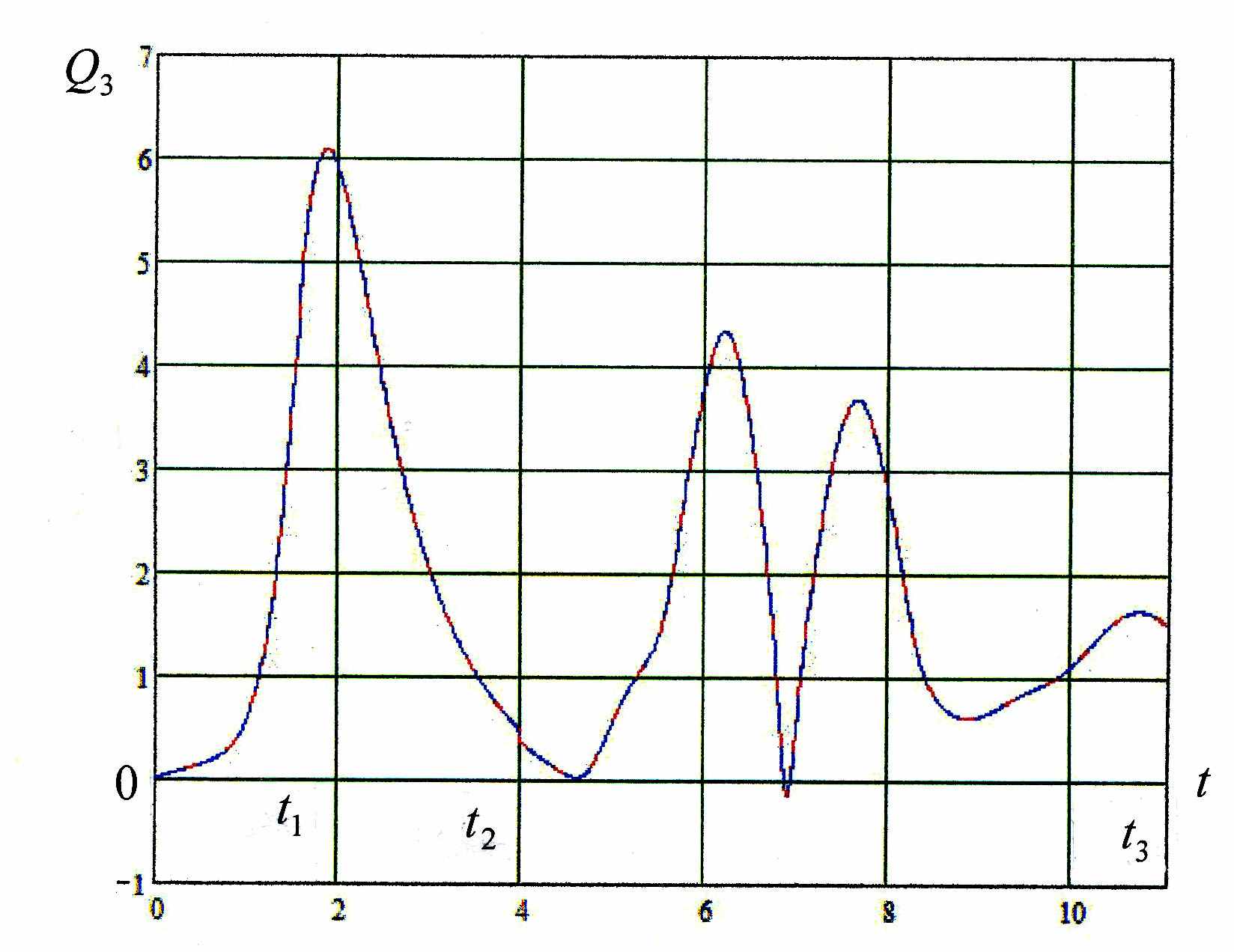 |
| Рис. 11 |
Для проверки динамического расчёта обобщённые движущие силы определяются с помощью уравнений Лагранжа второго рода. Совпадение движущих моментов, найденных разными методами, свидетельствуют о правильности полученных результатов.
Далее из технических каталогов по максимальной мощности выбираются приводные двигатели и передаточные механизмы (редукторы, волновые передачи, шарико-винтовые передачи и др.). При этом выбранные двигатели проверяются по моментам.
При исследовании робота в курсовом проекте определяются геометрические, кинематические и динамические ошибки, влияющие на точность его позиционирования. Этот расчёт важен по многим причинам. Наличие длинных открытых кинематических цепей приводит к накоплению ошибок, возникающих в каждом из звеньев, образующих цепь. Возрастают суммарные зазоры в кинематических парах, снижается жёсткость звеньев, что приводит к увеличению ошибок. В связи с быстродействием роботов двигатель должен быть описан динамической характеристикой, в то время как программное управление формируется обычно с учётом идеальной характеристики ввиду простоты его реализации. Возникающие из-за этого отклонения законов изменения обобщённых координат от их программных значений, т.е. динамические ошибки, приводят к изменению формы траектории. В курсовом проекте динамические ошибки уменьшаются с помощью активных и пассивных обратных связей. При этом определяется эффективность систем управления и проверяется их устойчивость.
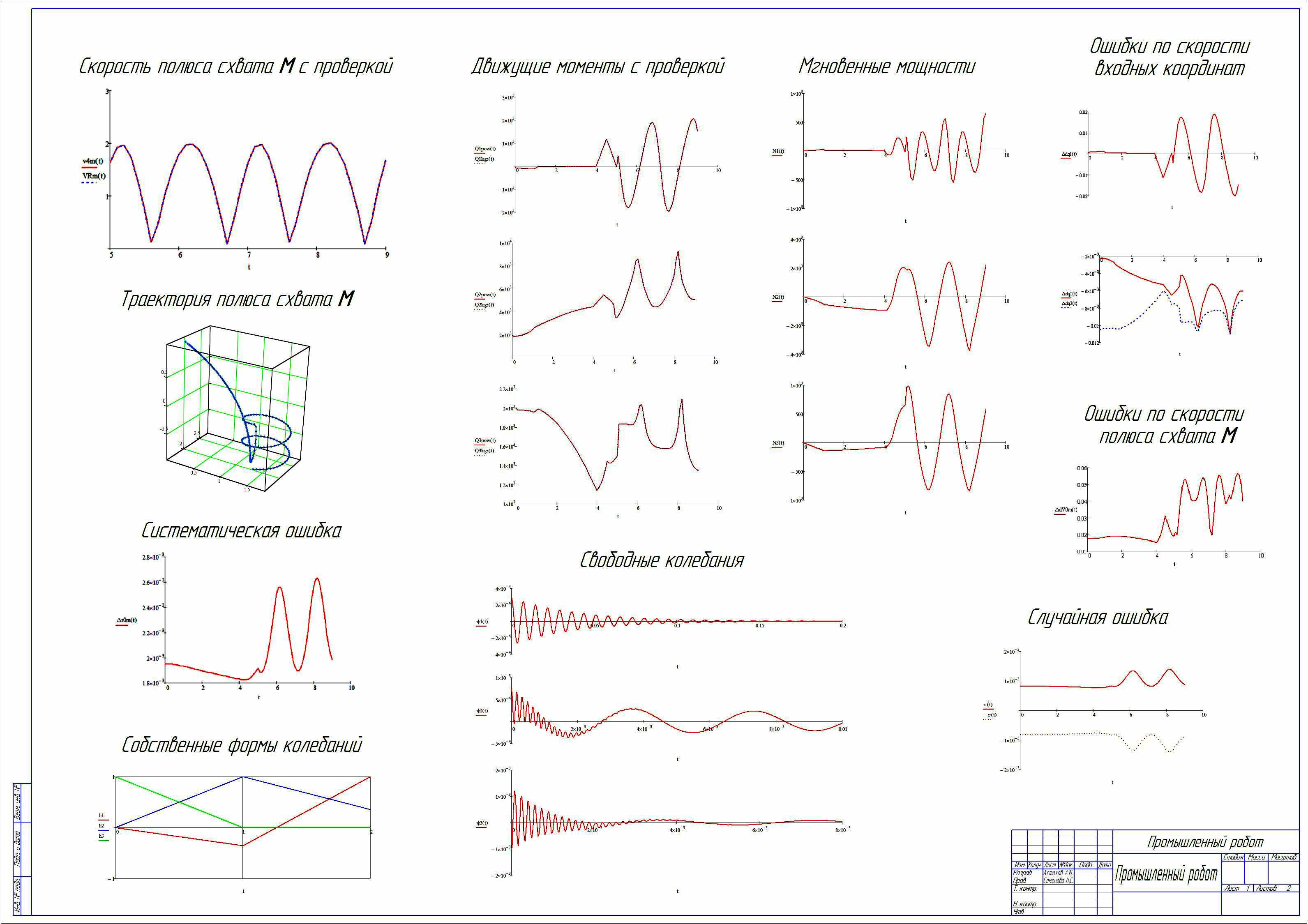 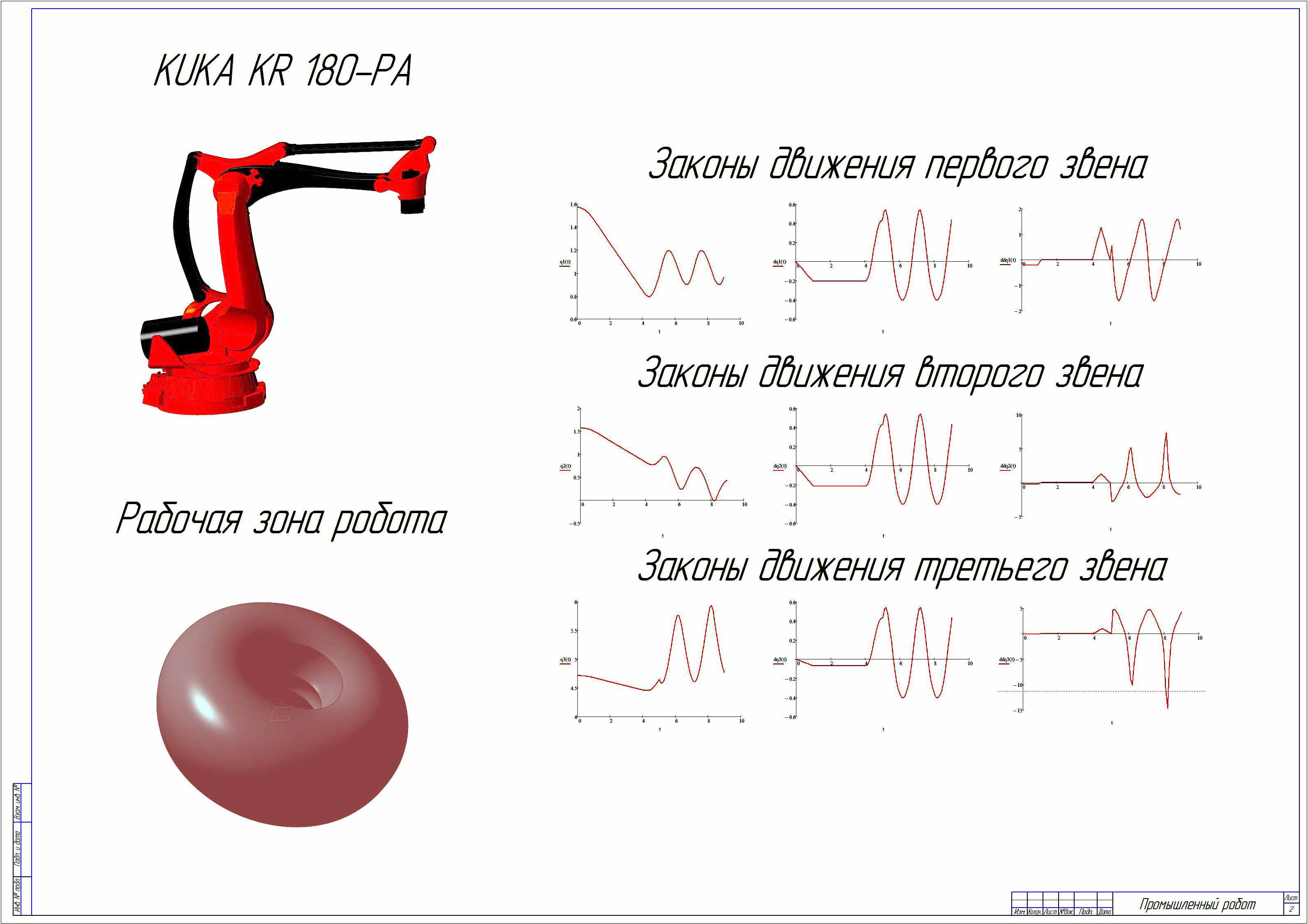 Рис. 12 |
| |
Фактор повышения быстроходности и производительности обуславливает необходимость рассмотрения не только перечисленных выше ошибок, но и учёта упругости звеньев. На последнем этапе определяются статические ошибки, вызванные деформациями звеньев, в окрестности положений равновесия определяются собственные частоты и формы, т.е. оцениваются колебания вблизи этих положений.
На рис. 12 приведен пример оформления графической части курсового проекта, выполненный студентом группы 3171/1 А.Ю. Астаховым.
При выполнении курсового проекта студенты используют по своему выбору математические пакеты «Mathematica», «Matlab», «Mathcad», графические пакеты «AutoCAD», «Компас 3D», NX6 и др., на которые кафедра ТММ СПбГПУ приобрела лицензии.
СПИСОК ЛИТЕРАТУРЫ
- Теория механизмов и машин: Учеб. пособие для студентов высш. учеб. заведений / М.З. Коловский, А.Н. Евграфов, Ю.А. Семенов, А.В. Слоущ. 3-е изд., испр. – М.: Изд. центр «Академия», 2008. – 560 с.
- Коловский М.З., Слоущ А.В. Основы динамики промышленных роботов. – М.: Наука, 1988. – 240 с.
Поступила в редакцию 20.02.2009
После доработки 10.03.2009
1 По М.З. Коловскому структурной группой называется кинематическая цепь, в которой число степеней подвижности совпадает с числом входов (двигателей); если это число равно нулю, то она является группой Ассура
Теория Механизмов и Машин. 2009. №1. Том 7.