
Д. Г. Поляк, Ю. К. Есеновский-Лашков
| Вид материала | Документы |
- Составители: адвокат Д. П. Ватман (речи по гражданским делам), адвокат, канд юрид наук,, 3647.6kb.
- История мировой экономики: Учеб для вузов по эконом спец /Г. Б. Поляк, В. С. Адвадзе,, 53.93kb.
- Парламентської Асамблеї Ради Європи від 05. 92 р. інвалідність визначена як обмеження, 112.43kb.
- Поляк Адель Исааковна, к и. н., профессор рабочая программа, 123.09kb.
- Поляк Адель Исааковна, кандидат искусствоведения, профессор элективный курс, 121.86kb.
- В. Поляк Методология в Израиле: вчера, сегодня, завтра, 175.53kb.
- «Сердцем – поляк…» Польша, 68.48kb.
- Грин александр степанович, 42.93kb.
- Очерки Русской Смуты. Еще несколько глав, и автор кончил бы там, где он начал свои, 3795.46kb.
- Методология и подходы при описании структурных особенностей нейтральной жидкой воды, 122.52kb.
ОСНОВНЫЕ ТРЕБОВАНИЯ К ЭЛЕКТРОННЫМ И МИКРОПРОЦЕССОРНЫМ СИСТЕМАМ
В зависимости от выбранного алгоритма управления и настройки системы автоматики можно обеспечить или высокие динамические показатели автомобиля, или наилучшую топливную экономичность. В связи с этим приходится выбирать компромиссные варианты алгоритма и настройки системы управления ГМП, которые, не ухудшая заметно динамических показателей автомобиля, позволяют получить хорошую топливную экономичность на наиболее часто встречающихся режимах эксплуатации. Задача может быть успешно решена при переключении передач в зависимости от двух параметров: скорости движения автомобиля и нагрузки на двигатель. Чем выше нагрузка на двигатель, тем при более высоких частотах вращения коленчатого вала и, следовательно, при больших скоростях движения автомобиля должны переключаться передачи.
Для улучшения топливной экономичности автомобиля и исключения цикличности процесса переключения передач скорость движения автомобиля, при которой происходит переход с низшей на высшую передачу, должна быть выше скорости, соответствующей обратному переключению (с высшей на низшую передачу).
Именно по такому алгоритму действуют практически все выпускаемые серийно ГМП независимо от типа применяемой системы управления. Наряду с этим проводятся разработки и исследования электронных систем управления ГМП, в которых переключение передач осуществляется в зависимости от коэффициента трансформации гидротрансформатора [16].
При использовании электронной и в особенности микропроцессорной систем управления достаточно просто решается проблема изменения алгоритма переключения передач, а также перенастройка блоков автоматики. Поэтому в зависимости от условий эксплуатации автомобиля можно переключать названные системы управления в наиболее подходящий для данных условий режим их работы. Такое переключение особенно целесообразно для автобусов, которые могут эксплуатироваться как в городских условиях, так и на загородных маршрутах, в том числе на горных дорогах.
Для защиты электронного блока ГМП от аварийных режимов, которые могут возникнуть при ошибочных действиях водителя или отказах элементов самой системы, в состав электронных и микропроцессорных систем управления должны входить устройства, осуществляющие следующие защитные функции:
предотвращение выхода из строя электронного блока при коротком замыкании или перегрузке по току цепей питания электромагнитов системы управления;
исключение возможности перехода на низшую передачу при движении с высокой скоростью в случае отказа датчиков скорости автомобиля или нагрузки двигателя, а также при неправильном срабатывании элементов системы автоматического управления;
предотвращение одновременного включения двух и более
передач.
Кроме того, система управления должна содержать устройство индикации срабатывания защиты для сигнализации водителю о наличии неисправности в системе.
ЭЛЕКТРОННЫЕ СИСТЕМЫ
На некоторых моделях автобусов фирмы «Вольво» (Швеция) применяется электронная система управления ГМП с «жесткой логикой». В состав электронного блока системы управления в основном входят дискретные элементы и только несколько интегральных микросхем. Управление переключением передач осуществляется в зависимости от скорости движения автобуса и нагрузки двигателя. В качестве датчика скорости автобуса используется индукторный датчик, частота выходного сигнала которого пропорциональна частоте вращения ведомого вала ГМП. Датчиком нагрузки двигателя является ступенчатый электрический переключатель, связанный с педалью подачи топлива.
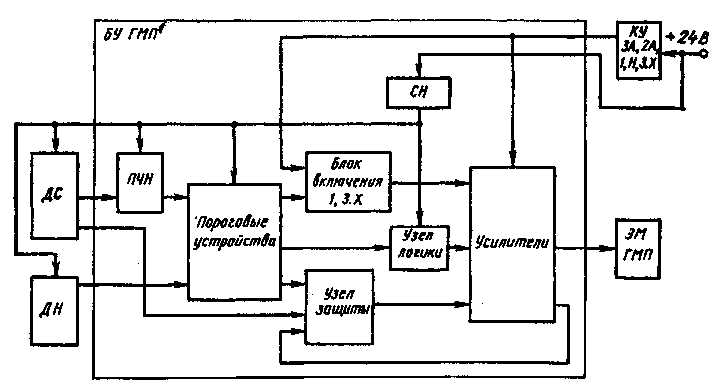
Рис. 71. Структурная схема электронной системы управления ГМП автобусов
Опыт длительной эксплуатации автобуса, оборудованного ГМП с такой системой управления, показал высокую ее надежность. В качестве примера выполнения элементов, входящих в электронную систему управления ГМП, ниже приведено описание отечественной системы управления ГМП автобусов большой вместимости.
Электронная система управления ГМП городских автобусов
Рассматриваемая электронная система предназначена для автоматического управления трехступенчатой гидромеханической передачей с блокируемым гидротрансформатором. По мере разгона автобуса происходит последовательное переключение передач с первой до третьей и далее блокируется гидротрансформатор. Кроме этого, электронная система выполняет защитные функции.
Структурная схема электронной системы управления показана на рис. 71, ее электрическая схема и электронный блок — на рис. 72 и 73, а подключение внешних устройств к электронному блоку — на рис. 74. Схема стабилизатора напряжения СИ и ПЧН приведена на рис. 5 и 17.
В качестве датчика скорости ДС автобуса (см. рис. 71) использован индукторный датчик (см. рис. 43), расположенный над одним из зубчатых колес, установленных на ведомом валу ГМП. Поэтому частота изменения ЭДС на выходе датчика ДС пропорциональна частоте вращения данного вала ГМП, т. е. пропорциональна скорости движения автобуса.
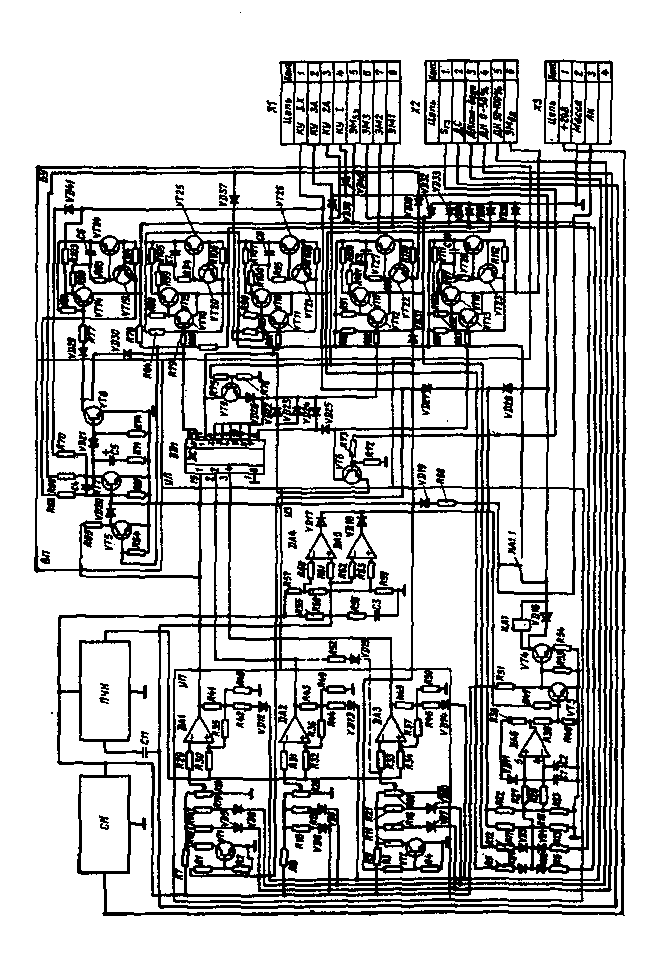
Рис. 72. Схема электронного блока системы управления ГМП автобусов
Рис. 73. Электронный блок системы управления ГМП автобусов
Датчик нагрузки ДН двигателя выполнен в виде двух переключателей S1 и S2, приводимых от педали подачи топлива.
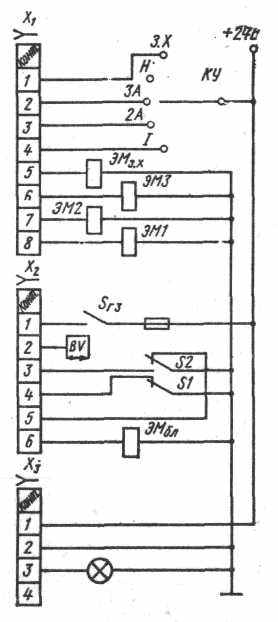
Рис. 74. Схема подключения аппаратуры управления и электромагнитов системы управления ГМП к электронному блоку: К.У — контроллер управления; Sгз — включатель гидрозамедлителя; S1, S2 — микропереключатели датчика нагрузки двигателя; ЭМ1, ЭМ2, ЭМ3, ЗМвд, ЭЛ1з.х — электромагниты системы управления
До тех пор, пока эта педаль находится в положениях, соответствующих подаче менее 50 % максимального значения величины подачи топлива, ни один из переключателей датчика нагрузки не срабатывает (положение контактов переключателей показано на рис. 74). Переключатель S1 срабатывает, когда педаль устанавливается в любое из положений, при которых подача топлива в двигатель составляет от 50 до 100 % максимального ее значения.
Для обеспечения срабатывания переключателя S2 водитель должен установить педаль подачи топлива дальше Положения, соответствующего 100 % подаче топлива в двигатель, преодолев при этом усилие дополнительной пружины. Такой режим носит название «кикдаун», и используется для принудительного включения понижающей передачи автобуса с целью повышения его динамики в процессе обгона.
Помимо основного режима управления гидропередачей, при котором по мере разгона автобуса осуществляется автоматическое переключение всех передач и блокировка гидротрансформатора (положение ЗА контроллера), в системе управления предусмотрены еще следующие режимы:
автоматического переключения первой и второй передач с блокировкой гидротрансформатора после разгона автобуса на второй передаче до заданной скорости (положение 2А контроллера);
принудительного включения первой передачи независимо от скорости движения автобуса (положение 1 контроллера);
принудительного включения передачи заднего хода независимо от скорости движения автобуса (положение З.Х. контроллера).
Кроме того, обеспечивается возможность установки передачи в нейтральное положение (положение Н контроллера).
Задание необходимого режима работы системы управления ГМП осуществляется с помощью контроллера управления КУ, схема подключения которого к электронному блоку приведена на рис. 74.
В табл. 19 указан порядок подключения электромагнитов системы управления к источнику питания в зависимости от включаемой передачи и положения контроллера управления.
Узел пороговых устройств. Команды на переключение передач и блокировку гидротрансформатора вырабатывает пороговое устройство системы управления в зависимости от уровня напряжения на выходе ПЧН и положения переключателей датчика нагрузки ДН. Эти пороговые устройства выполнены на базе токо-разностных усилителей DAI, DA2 и DA3 (см. рис. 71). В режимах автоматического переключения передач ЗА и 2А напряжение к резистору R1 не подводится, вследствие чего транзистор VT1 закрыт, и резистор R10 отключен от массы.
В первом положении датчика нагрузки контакты переключателей S1 и S2 (см. рис. 74) замкнуты, что приводит к замыканию на массу (соответственно через диоды VD5, VD6, VD7, VD8, VD9, VD10) резисторов R14, R15, R16, R19, R20, R21 (см. рис. 72).
Во втором положении датчика нагрузки контакты S1 размыкаются, вследствие чего с массой оказываются соединенными только резисторы R19, R20, R21.
Третьему положению датчика нагрузки соответствует размыкание и замыкание соответствующих контактов переключателя S2. В этом случае с массой оказываются соединенными резисторы R42, R44 и R46 (соответственно через диоды VD12t VD13 и VDI4). Изменение подключения резисторов в зависимости от положения переключателей S1, S2 датчика нагрузки обеспечивает корректировку переключения передач в соответствии с нагрузкой двигателя.
19. Порядок включения электромагнитов системы управления
| Положение контроллера | Включаемая передача | Электромагниты | ||||
| ЭМ1 | ЭМ2 | ЭМ3 | ЭМ6Л | Мз.х | ||
| ЗА | Первая Вторая Третья Третья** | + — — — | — + — — | — — + + | — — — + | — — — — |
| 2А | Первая Вторая Вторая** | + — — | — + + | — — — | — — + | — — — |
| 1 | Первая | + | — | — | — | — |
| 3. X | Задний ход | — | — | — | — | + |
| Н | Нейтральное положение | — | — | — | — | — |
* + — электромагнит включен, — — выключен.
** С режимом блокировки гидротрансформатора.
Управление переключением с первой на вторую передачу и обратно осуществляется пороговым устройством на базе усилителя DA1. Если в автобусе педаль подачи топлива находится в положении, соответствующем первому положению датчика нагрузки, то сила тока Iи, проходящего через инвертирующий вход усилителя, определяется сопротивлением резисторов R7, R14, R19, R29 и установкой подвижного контакта регулировочного переменного резистора R24.
Сила тока Iн, проходящего через неинвертирующий вход усилителя DA1, зависит от напряжения Uy на выходе ПЧН и сопротивления резистора R30. При низкой скорости движения автобуса величина Uy мала, в связи с чем Iи>Iн, усилитель закрыт и на его выходе напряжение близко к нулевому значению. Когда же вследствие возрастания скорости автобуса до значения vI—II, соответствующего переключению с первой передачи на вторую, сила тока Iи становится больше, чем Iи, то на выходе усилителя появляется напряжение. Это напряжение через делитель напряжения, образованный резисторами R41, R42 (см. рис. 72), и резистор R35 подводится к неинвертирующему входу усилителя DA1. В результате возникающей положительной обратной связи происходит лавинообразное увеличение силы тока Iн, обеспечивающее переход усилителя в режим с высоким уровнем напряжения UВых на его выходе. Появление напряжения UВЫХ является сигналом для переключения с первой на вторую передачу.
Для переключения со второй на первую передачу скорость автобуса должна снизиться до значения VII-I, при котором сила тока Iн станет меньше значения Iи.
При включенной второй передаче, вследствие действия в делителе DA1 положительной обратной связи, уменьшение силы тока Iн до значения, соответствующего Iи, произойдет при скорости VII-I. которая меньше скорости VI-II. Тем самым предотвращается цикличность переключения передач.
При установке педали подачи топлива в положение, соответствующее второму положению датчика нагрузки, вследствие отключения от массы резистора R14 (см. рис. 72), уменьшается падение напряжения в резисторе R7, благодаря чему возрастает сила тока Iи, проходящего через инвертирующий вход усилителя DA1. В результате переключение с первой на вторую передачу и обратно будет происходить при более высоких уровнях напряжения на выходе ПЧН и соответственно при больших скоростях движения автобуса.
На режиме кикдаун вследствие отключения от массы резисторов R14 и R19 переключение с первой на вторую передачу и обратно будет происходить при еще более высоких скоростях движения автобуса. Наряду с этим из-за подключения к массе резистора R42 уменьшится напряжение на средней точке делителя напряжения, образованного резисторами R41 и R48, что приведет к ослаблению эффекта положительной обратной связи в усилителе DA1. Это необходимо для расширения диапазона скоростей автобуса, где может быть реализовано действие режима кикдаун.
Управление переключением со второй на третью передачу и обратно осуществляется пороговым устройством на базе усилителя DA2. Оно действует точно так же, как и пороговое устройство на базе усилителя DA1. Аналогичным образом действует и пороговое устройство на базе усилителя DA3, управляющее включением и выключением блокировки гидротрансформатора.
20. Таблица истинности дешифратора К511ИД1
| Номер строки | Уровень напряжения на входах | Номер выхода, соединенного с массой | ||
| 1 | 2 | 4 | ||
| Предусмотренные комбинации входных сигналов | ||||
| 1 | 0 | 0 | 0 | 0 |
| 2 | 1 | 0 | 0 | 1 |
| 3 | 1 | 1 | 0 | 3 |
| 4 | 1 | 1 | 1 | 7 |
| Непредусмотренные комбинации входных сигналы | ||||
| 5 | 0 | 1 | 1 | 6 |
| 6 | 1 | 0 | 1 | 5 |
| 7 | 0 | 1 | 0 | 2 |
| 8 | 0 | 0 | 1 | 4 |
Для создания оптимальных условий работы ГМП в режиме 2А необходимо, чтобы на данном режиме блокировка гидротрансформатора включалась при более низких скоростях движения автобуса по сравнению с режимом ЗА. Для выполнения указанного требования резистор R3 соединяется с выводом 3 штепсельного разъема XI, к которому подводится напряжение от бортовой сети при установке контроллера в положение 2А. В этом случае открывается транзистор VT2, резистор R11 подключается к массе, что обеспечивает увеличение падения напряжения в резисторе R9 и, как следствие, уменьшение силы тока Iи, проходящего через инвертирующий вход усилителя DA3. Уменьшение силы тока Iи позволяет переключить усилитель DA3 в режим с высоким уровнем напряжения на выходе при меньшей силе тока I,„ т. е. при более низкой скорости движения автобуса.
Узел логики (УЛ). При движении автобуса с низкой скоростью напряжения на выходах усилителей DAI, DA2 и DA3 (см. рис. 72) близко к нулю, что соответствует уровню «логического 0» для устройств, осуществляющих последующую обработку данных сигналов. По мере разгона автобуса высокое напряжение вначале появляется на выходе усилителя DA1, а затем последовательно на выходах усилителей DA2 и DA3. Данный уровень напряжения является уровнем «логической 1» при последующей обработке сигналов, которая выполняется с помощью дешифратора DD1, в качестве которого применена интегральная микросхема типа К511ИД1. Дешифратор осуществляет преобразование различных комбинаций сигналов на выходе усилителей DAI, DA2 и DАЗ в сигналы, необходимые для включения в заданной последовательности усилителей питания электромагнитов системы управления.
Дешифратор К511ИД1 имеет четыре входа, из которых используются только три (1, 2 и 4). В зависимости от комбинации сигналов с уровнями «логического 0» или «логической 1», подводимых к входам дешифратора, какой-либо один из его выходов соединяется с массой.
Таблица истинности дешифратора (табл. 20) содержит указания, каким комбинациям сигналов на входе дешифратора соответствует соединение с массой того или иного его выхода.
При выполненном в схеме управления соединении выхода усилителя DA1 с входом 1 дешифратора и выходов усилителей DA2, DA3 соответственно с входами 2 и 4 дешифратора напряжение с уровнем «логической I» может появиться на входе с более высоким номером только при наличии такого уровня на входах с более низкими номерами. Такие комбинации сигналов, указанные в строках 1 — 4 табл. 20, в дальнейшем будут обозначаться термином «предусмотренные», поскольку они соответствуют нормальной работе пороговых устройств. Любая другая комбинация сигналов на входах дешифратора, указанная в строках 5 — 8 табл. 20, возможна только при нарушении нормальной работы пороговых устройств. Поэтому в дальнейшем такие комбинации сигналов обозначаются термином «непредусмотренные».