
Ю. А. Фатыхов, О. В. Агеев, В. М. Евтропков, А. З. Мацонко Рассмотрены перспективы разработки современной разделочно-филетировочной техники на основе мехатроники
| Вид материала | Документы |
СодержаниеСписок литературы |
- Горэ Джозеф. Подъем затонувших кораблей, 4215.7kb.
- Математическое моделирование процесса разработки градостроительного обоснования коротун, 152.25kb.
- Логика (2 курс, 4 семестр) Преподаватель, 435.04kb.
- Аналитический обзор, 1461.75kb.
- Перспективы генной терапии, 222.4kb.
- Философские проблемы науки и техники, 294.53kb.
- Темы рефератов по политологии: Современное состояние политической науки: проблемы, 10.21kb.
- Авторы программы: доцент Морозов В. Б., доцент Соломатин В. С., профессор Шувалов, 87.32kb.
- Перспективы создания полимерных материалов нового поколения, 580.12kb.
- Министерство Образования Республики Беларусь Белорусский Национальный Технический Университет, 278.3kb.
УДК 664.951.022.6.002.5
ПЕРСПЕКТИВЫ РАЗРАБОТКИ МЕХАТРОННЫХ КОМПЛЕКСОВ ДЛЯ ПЕРВИЧНОЙ ОБРАБОТКИ РЫБЫ
Ю.А. Фатыхов, О.В. Агеев, В.М. Евтропков, А.З. Мацонко
Рассмотрены перспективы разработки современной разделочно-филетировочной техники на основе мехатроники. Показано, что новое оборудование должно проектироваться в виде мехатронных комплексов с использованием методов технического творчества, САПР и CALS-технологий.
мехатроника, рыборазделочная машина, филетирование, разделочно-филетировочное оборудование, мехатронный комплекс
Опыт экономического развития ведущих стран мира доказывает, что интенсификация производства в области пищевой инженерии играет существенную роль в развитии общества.
Интенсификация рыбообрабатывающих производств способствует росту выпуска качественной и востребованной продукции при максимальном сокращении сырьевых, энергетических и трудовых затрат. Одновременно следует стремиться к экологической защите окружающей среды от вредного воздействия рыбообрабатывающих и связанных с ними промышленных производств [1].
Проблема обеспечения экологической защиты окружающей среды является актуальной. В результате резкого возрастания техногенного воздействия человека на природу в последние десятилетия возникла опасность изменения окружающей среды с непредсказуемыми последствиями. Экологическая напряженность обусловлена низким уровнем технологий, несовершенством очистных сооружений и экстенсивным способом производства, экономическими трудностями создания новых (совершенствования существующих) рыбообрабатывающих производств.
Известно, что интенсификация рыбообрабатывающего производства тесно связана с комплексной автоматизацией. В отличие от машиностроения, где накоплен большой опыт автоматизации (в том числе, роботизации и создания гибких производственных систем - ГПС), рыбообрабатывающее производство, особенно в сфере малого и среднего бизнеса, такого опыта почти не имеет.
В то же время, малые и средние рыбообрабатывающие производства имеют ряд специфических особенностей. К ним относятся: широкий диапазон изменения потребности, непредвиденное изменение номенклатуры выпускаемых продуктов, заказной характер готовой продукции и повышенные требования к ее качеству, малый жизненный цикл производства, многостадийность технологических процессов и др.
Традиционные для больших предприятий методы создания оборудования для первичной обработки рыбы, основанные на применении специализированного оборудования для каждого технологического процесса, обусловили ряд недостатков существующих производств. Среди них можно перечислить следующие: длительность отдельных стадий и всего процесса в целом; низкая степень автоматизации и механизации; практическое отсутствие типового блочно-модульного оборудования, оснащенного средствами автоматизации; значительные нормы расхода сырья; сложность и длительность или невозможность перехода от выпуска одного вида продукта к другому; недостаточная эффективность мер по экологической защите окружающей среды, высокие стоимость и металлоемкость. Таким образом, имеются существенные препятствия для использования такого оборудования на малых и средних производствах.
Вместе с тем, техническая политика зарубежных фирм ориентирована на создание универсального, многофункционального оборудования с высокой степенью гибкости, в том числе блочно-модульного типа. Это позволяет трансформировать процессы первичной обработки рыбы с учетом широкого спектра различных требований – технических, энергетических, рыночных, экологических и т.д. [2].
Обеспечение гибкости технологического производства возможно следующими способами:
– режимно-технологическими: проведение процессов в различных дискретных, непрерывных и непрерывно-дискретных режимах, при рециркуляции исходных и промежуточных продуктов, параллельно-последовательное построение технологической линии в различных комбинациях, совместное проведение операций или процессов;
– организационно-управленческими: выбор рационального пути обработки рыбы с учетом технической базы, организация выпуска полуфабрикатов, организация поставки сырья, управление маркетингом, обеспечение реализации готовой продукции и др.;
– аппаратно-конструктивными: использование технологического оборудования с широким диапазоном изменения параметров, обеспечивающих устойчивую работу на различном сырье, использование адаптивных систем управления, обеспечение износостойкости материалов конструкций, агрегатирование и трансформирование структуры машин путем блочно-модульного оформления, применение модулей повышенной универсальности, развитие универсальных транспортно-накопительных систем, реновация рабочих инструментов;
– интеграцией процесса получения готового продукта с процессами разработки (поиска) технологии, автоматизированного проектирования и технологической подготовки производства, исследования продукта, пробы и сертификации новых продуктов.
В связи с этим, в современных условиях решением задачи технического перевооружения малых и средних предприятий, выполняющих первичную обработку рыбы, может стать создание мехатронных комплексов (МК).
Мехатронный комплекс для первичной обработки рыбы – это интеллектуальная многомерная сложная техническая система. Он предназначен для экономичного изготовления рыбного филе, построен на мехатронных принципах и технологиях, способных эффективно выполнять программы функциональных движений рабочих органов в изменяющихся условиях внешней среды [3].
Разработка МК охватывает все основные фазы жизненного цикла филетирующих машин (предпроектные исследования, проектирование, конструирование, производство, эксплуатация, утилизация и т.д.). При этом предусматривается привлечение различных методологических подходов [4]: методов технической кибернетики, эвристических методов решения технических проблем, методов технического творчества, САПР (рис. 1, 2), а также информационных CALS-технологий.
Важно отметить, что разработка МК обуславливает принципиальные особенности нового класса машин. Среди них можно выделить следующие существенные отличия от традиционных конструкций.
Во-первых, в мехатронных филетирующих машинах может быть существенно расширен так называемый базис программирования движений, т. е. координатный базис, в котором задается программа движения рабочих органов. Более доступным становится применение нелинейных координатных базисов, что ранее было сопряжено с усложнением кинематических передач и механических программных устройств – копиров, кулачков, направляющих. Возможность применения мехатронных модулей с параллельной кинематикой создает принципиальные предпосылки для существенного упрощения кинематической схемы механической части машины и блока приводов.
Во-вторых, возможное применение в мехатронных машинах нелинейных координатных базисов обуславливает нелинейную связь между показателями назначения и качества филетирующего оборудования. Связи между стоимостью, производительностью, точностью обработки и металлоемкостью машин могут иметь нелинейный и очень выгодный для потребителя характер. Например, при незначительном снижении производительности машины можно добиться резкого скачка по точности обработки, получить значительное снижение металлоемкости, габаритов и массы машины. С другой стороны, существенное увеличение производительности и быстродействия настройки может быть достигнуто незначительным увеличением стоимости машины с улучшением массогабаритных характеристик.
В-третьих, появляется возможность построения филетирующих машин на основе серийных мехатронных модулей движения, а в будущем - на базе интеллектуальных модулей движения. Это также создает предпосылки для существенного упрощения кинематической схемы оборудования, повышения уровня унификации, значительного прироста ремонтопригодности, упрощения и ускорения ремонта, увеличения надежности без снижения функциональной нагрузки. Создается основа для реального модульного агрегатирования филетирующей техники на основе типовых и унифицированных мехатронных изделий [3].
На начальной стадии построения МК предусмотрена разработка его обобщенной функциональной схемы. На рис. 3 приведена обобщенная структура МК, предлагаемая в соответствии с рекомендациями, изложенными в [3].
Под мехатронным модулем движения подразумевается конструктивно и функционально самостоятельное изделие, включающее в себя управляемый двигатель, механическое и информационное устройства. Информационное устройство состоит из датчиков обратной связи и информации. Кроме того, в его состав могут входить вычислительные блоки для обработки и преобразования сигналов. В частности, такими приборами для сбора данных могут быть фотоимпульсные датчики положения и скорости вала двигателя, оптические линейки, миниатюрные видеокамеры и т.д.
Постепенное насыщение мехатронных модулей движения микропроцессорами, цифровыми сигнальными процессорами (DSP – digital signal processors), аналого-цифровыми и цифроаналоговыми преобразователями, программируемыми вентильными матрицами переводит их в класс интеллектуальных мехатронных модулей. В дальнейшем следует ожидать серийного производства таких интеллектуальных изделий, что обуславливает возможность их применения в мехатронных филетирующих машинах.
Под внешней средой подразумевается технологическая среда, которая включает основное и вспомогательное оборудование, объекты обработки, сопрягаемые технологические устройства. К таким объектами можно отнести сырье, гидравлические и пневматические компрессоры, машины для сортирования и ориентирования рыбы, весоконтрольные автоматы, устройства для обслуживания рабочих органов и т. д. Следует отметить, что параметры технологических сред должны моделироваться при помощи аналитико-экспериментальных исследований или методами компьютерного вычислительного эксперимента. Это позволит определить силы резания рыбного филе, реакцию струи жидкости при гидравлическом резании.
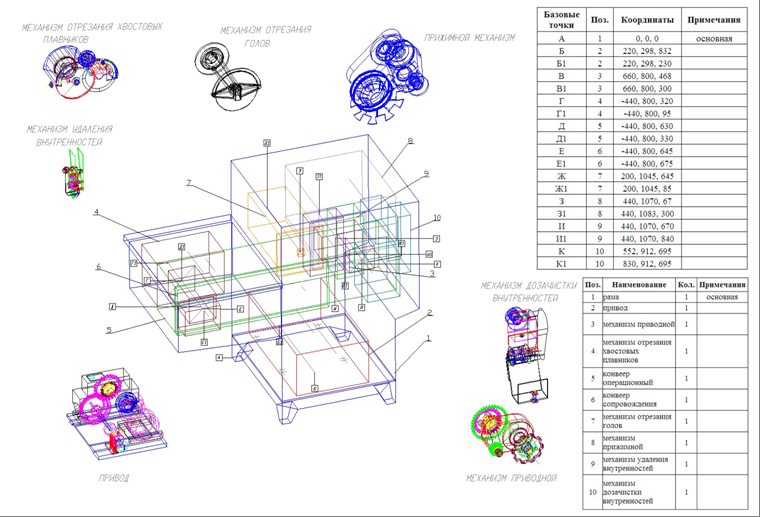
Рис. 1. Фрагмент структурно-компоновочной схемы МК (система AutoCAD)
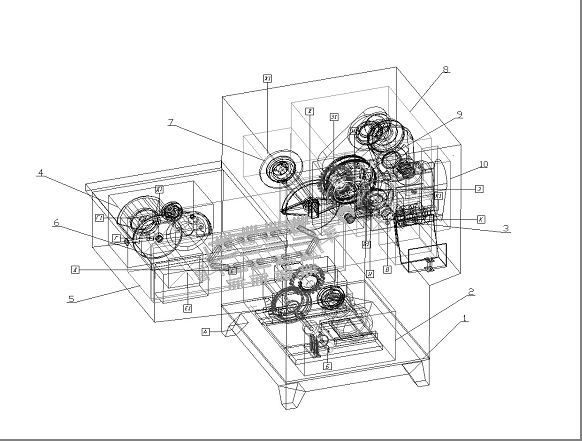
Рис. 2. Фрагмент эскизной компоновки МК (система AutoCAD)
Механическое устройство и двигатели объединяются в группу исполнительных модулей. Группа интеллектуальных модулей включает электронную, управляющую и информационную части мехатронной машины. Устройством компьютерного управления в общем случае является комплекс программно-аппаратных средств, формирующих сигналы управления приводами машины. Информационное устройство предназначается для сбора и передачи в компьютерное устройство управления текущей и достоверной информации о состоянии внешней среды и узлов мехатронной машины. Механическое устройство представляет собой многозвенный механизм, в кинематическую цепь которого входят движущиеся звенья, составляющие кинематические пары.
Рабочим органом машины является составная часть механического устройства, предназначенная для непосредственного выполнения технологических операций. К таковым можно отнести дисковые ножи, ленточные ножи, упорные планки, захваты для удержания тушек рыбы, сталкиватели и др. Иными словами, рабочий орган является управляемым модулем, имеющим определенные степени подвижности, рабочую зону и состоящим из одного или нескольких элементов.
Рис. 3. Обобщенная структурная схема МК для первичной обработки рыбы
Как видно из вышеизложенного, процесс разработки и внедрения МК для первичной обработки рыбы является сложной научно-технической задачей. Основой успешного создания и функционирования МК является наличие системной комплексной разработки. Этим обеспечивается полный сквозной цикл: информация – научные исследования – проектирование – конструирование – подготовка производства – эксплуатация – информация – совершенствование [4].
Системообразующими факторами при этом являются: гибкость разработки, гибкость управления, объективность и полнота информации, наличие кадрового сопровождения, обеспечивающего совершенствование комплекса.
Создание проектов отечественных мехатронных комплексов для первичной обработки рыбы потребует решения ряда непростых задач [5]. Среди них можно указать следующие:
– создание инжиниринговой базы для решения наукоемких проблем;
– проведение научных исследований в области автоматизации процессов первичной обработки рыбы;
– определение подходов и концепций разработки и внедрения автоматизированных комплексов для первичной обработки рыбы;
– создание унифицированного блочно-модульного оборудования для первичной обработки рыбы;
– разработка систем автоматизированного проектирования рыбообрабатывающего оборудования.
В заключение следует отметить, что новые свойства мехатронного филетирующего оборудования, прежде всего, зависят от эффективности применения новых мехатронных технологий в совокупности с методами САПР, технического творчества, эвристического анализа, а также CALS-методиками. Качество оборудования нового поколения существенно определяется эффективностью и степенью интеграции научно-исследовательских, конструкторских, производственных и технологических процессов, которые лежат в основе мехатронных технологий.
СПИСОК ЛИТЕРАТУРЫ
1. Фатыхов Ю.А. Современный подход к разработке ресурсосберегающего разделочно-филетировочного оборудования / Ю.А. Фатыхов, А.В. Шлемин, О.В. Агеев // Известия высших учебных заведений. Пищевая технология. – 2007. – № 3 (298). – C. 91-94.
2. Фатыхов Ю.А. Мехатроника в рыборазделочном оборудовании: монография / Ю.А. Фатыхов, О.В. Агеев. – Калининград: ФГОУ ВПО «КГТУ», 2008. – 279 с.
3. Подураев Ю.В. Мехатроника: основы, методы, применение: учеб. пособие для вузов / Ю.В. Подураев. – М.: Машиностроение, 2007. – 256 с.
4. Норенков И.П. Информационная поддержка наукоемких изделий. CALS-технологии / И.П. Норенков, Л.К. Кузьмик. – М.: МГТУ им. Н.Э. Баумана, 2002. – 320 с.
5. Фатыхов Ю.А. Ресурсосберегающее мехатронное управление оборудованием для разделывания и филетирования рыбы: учеб. пособие / Ю.А. Фатыхов, О.В. Агеев. – Калининград: ФГОУ ВПО «КГТУ», 2007. – 158 с.
PROSPECTS OF WORKING OUT OF MECHATRONIC COMPLEXES FOR THE FISH PREPROCESSING
J.A. Fatychov, O.V. Ageev, V.M. Evtropkov. A.Z. Matsonko
Prospects of working out modern cutting-filleting equipment on a basis of mechatronics are considered. It is shown, that the new equipment should be projected in a kind of mechatronic complexes with use of methods of technical creativity.