
Московский государственный технический университет
| Вид материала | Документы |
- Московский Государственный Институт Электроники и Математики (Технический Университет), 763.07kb.
- Отчет государственного образовательного учреждения высшего профессионального образования, 2810.92kb.
- Московский Государственный Институт Электроники и Математики (Технический Университет), 10.69kb.
- Осрб 1-36 04 02-2008, 702.53kb.
- Дорожный Технический Университет (мади) г. Москва, Ленинградский проспект, д. 64, программа, 39.53kb.
- Технический Университет «мами», 19.15kb.
- Московский государственный авиационный институт (технический университет), 121.53kb.
- Московский авиационный институт (государственный технический университет), 297.3kb.
- Технический университет И. П. Карпова базы данных утверждено Редакционно-издательским, 2165.73kb.
- Утверждаю, 394.89kb.
РЫСИНА Анастасия Андреевна
Населенный пункт: г. Сочи
Учебное заведение: МОУ Гимназия №31
Класс/курс: 10 класс
Направление: Физика и познание мира
ЭФФЕКТИВНОСТЬ ПРИМЕНЕНИЯ СОЛНЕЧНЫХ БАТАРЕЙ В БЫТУ И ТЕХНИКЕ
Цель нашего проекта – экспериментальное доказательство возможности использования солнечных батарей в г. Сочи. Для достижения цели были поставлены следующие задачи:
1) Изучить значение альтернативной энергии в современном мире.
2) Изучить причины использования альтернативной энергии.
3) Выявить, какие виды альтернативной энергии подходят для города Сочи.
4) Провести ряд экспериментов (определение КПД батареи, её мощность при искусственном освещении, в солнечную погоду), подтверждающих гипотезу о возможности применения солнечной энергии на территории г. Сочи.
5) Сделать определённые выводы на базе проведённых экспериментов.
Для определения КПД солнечной батареи был совершён следующий ряд экспериментов.
1.Эксперимент в облачную зимнюю погоду.
2. Измерение мощности батареи при вечернем комнатном искусственном освещении.
получим следующие показания:
i= 0,23×10-3 А; u= 4 В; r= 5 Ом;
Рассчитаем p=iu; Р=0,23×10-3 А×4 В = 0,92× 10-3 Вт
Вывод: кроме того, что днем при естественном освещении солнечная батарея дает 9 В, что делает возможным ее эффективное использование в полевых условиях, ею можно также пользоваться и при искусственном освещении
3. Вычисление КПД батареи
КПД любого преобразователя одного вида энергии в другой называют отношение полученной («полезной») энергии к энергии, затраченной на ее получение. КПД солнечной батареи определяется отношением мощности электрического тока Рт во внешней цепи к мощности излучении Рс, вызвавшего появлении фототока:

Мощность электрического тока Рт на выходе батареи можно узнать, подключив к клеммам фотоэлемента магазин сопротивлений последовательно с миллиамперметром, а параллельно им вольтметр, показывающий напряжение U на внешнем участке цепи. Тогда Рт=IU. Плотность потока солнечного излучения у границы земной атмосферы называется солнечной постоянной; она равна 1373 Вт/м2. Плотность потока солнечного излучения у поверхности Земли меньше, чем у границы земной атмосферы, так как часть светового потока отражается атмосферой, а часть поглощается в ней. Отражение и поглощение солнечного излучения существенно зависят от наличия в воздухе облаков, пыли и дыма; кроме того, они зависят еще от толщины слоя атмосферы. Чем ниже Солнце находится над горизонтом, тем большей толщины слой атмосферы встречается на пути его излучения.
При отсутствии облаков, пыли и дыма в атмосфере плотность потока солнечного излучения у поверхности Земли на уровне моря имеет в зависимости от высоты Солнца над горизонтом примерно те значения, что даны в табл. I
4. Определение КПД в ясный безоблачный день.
Рт = IU = 0,26·4 = 1,04 (Вт).
| Высота h Солнца над горизонтом, | Плотность потока солнечного |
| град. | излучения φ, Вт/м2 |
| 5 | 270 |
| 10 | 450 |
| 15 | 570 |
| 20 | 660 |
| 30 | 770 |
| 40 | 840 |
| 50 | 890 |
| 60 | 910 |
3. Измеряем высоту h Солнца над горизонтом с помощью транспортира с отвесом (рис. 2). По табл. I находим примерное значение плотности потока солнечного излучения φ. Вычисляем мощность солнечного излучения Рс, падающего на батарею: PC = φS = 890·0,0256 = 22,784 (Вт), где S - площадь поверхности фотоэлементов батареи (ее можно определить измерением соответствующих размеров с помощью линейки).
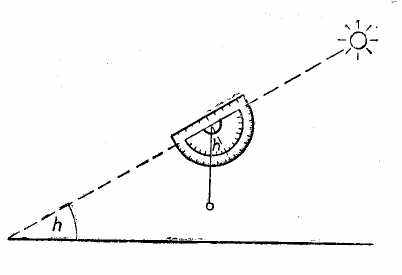
Рис. 2
- Вычисляем КПД солнечной батареи:
 .
.
- Результаты измерений и вычислений записываем в табл. 2.
Таблица 2.
| I, A | U, B | PT, Вт | h, град | φ, Вт/м2 | S, м2 | PС, Вт | η, % |
| 0,26 | 4 | 1,04 | 50 | 890 | 0,0256 | 22,784 | 4,56 |
5. Эксперимент для сравнения.
Соберем цепь, состоящую из батарейки «крона», рассчитанную на 9 в и подключим к ней прибор дозиметр.
Если прибор оставить в рабочем состоянии, то ресурса этой батарейки хватит на 8 часов, в то время как солнечная батарея может работать бесконечно долго при достаточном освещении.
вывод: более эффективным и выгодным является использование солнечных батарей, так как их достоинства — простота, надёжность и долговечность, малая масса и миниатюрность солнечных элементов, генерирование энергии без загрязнения окружающей среды; основной недостаток, ограничивающий развитие солнечной фотоэнергетики, — их пока ещё высокая стоимость.
ПОНЯТОВ Алексей Сергеевич
Населенный пункт: г.-к. Геленджик
Учебное заведение: МУДОД Центр дополнительного образования детей «Эрудит»
Класс/курс: 10 класс
Направление: Физика и познание мира
КОНЦЕНТРАТОР ФЛУКТАЦИЙ – ВКЛАД В ЭНЕРГЕТИКУ
Работа описывает устройство и принцип действия концентратора флуктуаций окружающей среды, именуемый кольцаром Лазарева. Обращается внимание общественности на необходимость изучения и усовершенствования подобных источников энергии. Несмотря на их малый энергетический выход, они экологически чистые и даровые и могут быть полезны человечеству. Автор считает, что у подобных источников энергии, при определённой степени их усовершенствования, есть реальные перспективы широкого внедрения в жизнь людей. Автор изготовил необходимые действующие образцы, и провёл с ними серию экспериментов.
Красноярский край
Лобастов Борис Михайлович
Населенный пункт: г. Красноярск
Учебное заведение: МОУ Средняя общеобразовательная школа № 42
Класс/курс: 10 класс
Направление: Науки о земле
ЭЛЕКТРОННЫЙ ОПРЕДЕЛИТЕЛЬ МИНЕРАЛОВ
В настоящее время практически отсутствуют удобные в использовании определители минералов. Кроме того, пользоваться печатными изданиями определителей для практического определения минералов сложно. Я впервые создал компьютерную программу электронный определитель минералов. В определитель включено около 60 породообразующих и рудных минералов, к каждому имеется описание. Интерфейс программы доступен и понятен пользователям, не требует специфических знаний для работы с ним. Определитель прост в использовании, что позволяет диагностировать минерал намного быстрее, чем при помощи традиционных определителей. Программа включает в себя словарь геологических терминов, видеоматериалы, справочные материалы. Тесты позволят проверить знания в различных областях геологии. Определяется минерал по шести основным физическим признакам: твёрдость, плотность, цвет, блеск, цвет черты и спайность. Работа над определителем продолжается 3 года, за это время собрана информация о наиболее распространённых минералах из различных источников и подобраны фотографии, подавляющее большинство фотографий сделаны автором в различных музеях и на выставках. Определитель может применяться в школах в геологических кружках и на уроках географии, студентами первых курсов геологических и геоэкологических специальностей при изучении курса "Общей геологии". В течение двух лет он успешно применялся на кафедре Геологии, Минералогии и Петрографии СФУ и в КрасГАУ.
Толетов Сергей Александрович
Населенный пункт: Назаровский район, п. Красная Поляна
Учебное заведение: Краснополянская средняя общеобразовательная школа
Класс/курс: 9 класс
Направление: Техника и инженерное дело
Переносная теплица «Зонт»
Русский человек тянется к земле. Об этом говорит статистика: Россия занимает I место в мире по наличию садовых, дачных или приусадебных участков.
Люди, для которых выращивание овощей или других, каких то экзотических растений не работа, а отдых, радость общения с природой., а для других побочный доход, но а для третьих просто источник выживания.
Цель работы: изготовление теплицы отвечающую современным требованиям: переносная (для возможности соблюдения севооборота почвы), возможность многократного использования, лёгкая при транспортировке, занимающая не много места при хранении, минимальная трудоёмкость при сборке, разборке и установке.
Описание сущности изобретения.
Теплица состоит из двух основных узлов:
- Металлический каркас-зонт.
- Укрывной материал
Заключение: данная конструкция переносной теплицы очень проста, каталог её деталей не превышает 10 единиц. Теплица легко устанавливается и разбирается на хранение. Для соблюдения севооборота она легко переносится с одного места на другое.
Курская область
Медведев Николай Евгеньевич
Населенный пункт: г. Курск
Учебное заведение: МОУ «Гимназия №44»
Класс/курс: 11 класс
Направление: Вычислительная техника и программное обеспечение
Проблема позиционирования антенно-фидерного оборудования на искусственные спутники Земли
Целью настоящей работы является: Разработка USB интерфейса и программного обеспечения позволяющее автоматически направлять антенно-фидерное устройство по мере изменения траектории полета искусственного спутника Земли.
Существует множество факторов, ухудшающих качество связи, особенно беспроводной. Одной из основных проблем при организации обмена информацией (радиосвязи) с подвижными объектами является трудность установки громоздких антенных систем обеспечивающих бесперебойную радиосвязь. При решении подобных задач широкое применение нашли радиопередающие устройства, работающие в диапазоне ультра – коротких волн (УКВ).
Однако для радиопередатчиков, работающих в УКВ диапазоне существует ограничение в дальности уверенной радиосвязи определяемой “прямой видимостью” (отсутствие преград) между приемником и передатчиком. Кроме того, для повышения качества и дальности радиосвязи на стационарных пунктах контроля принято применять эффективные многоэлементные направленные антенны. Поскольку мы ведем речь об организации обмена информации с движущимися объектами, приходится учитывать и другие аспекты и явления влияющие на устойчивость и дальность радиосвязи например такие, как эффект Доплера. При решении выше названных задач, удобно применять автоматические средства позиционирования и управления стационарными антеннами. Разработка программно-технических компонентов управление антенными хозяйствами является одной из актуальных проблем, с которой сталкиваются инженеры при построении комплексов обмена информацией.
В ходе работы над проектом искусственного спутника Земли «РАДИОСКАФ» ставилась задача автоматической элевации антенно–фидерного хозяйства и управления приемо-передатчиком при обмене информацией и считывании показателей с оборудования установленного на спутниках «РАДИОСКАФ» Юго-Западного технического университета. Эти искусственные спутники Земли используются студентами вуза для научных работ по измерению плотности вакуума на в разных точках орбиты.
В результате проделанной работы были рассмотрены явления которые необходимо учитывать для обеспечения бесперебойной радиосвязи с искусственными спутниками Земли, разработан интерфейс для управления поворотными устройствами YAESU и выбрано программное обеспечение для управления радиопередающими устройствами.
В ходе работы над проектом был собран приемо-передающий комплекс который был использован для установления радиосвязи студентов Юго-западного технического университета и экипажа международной космической станции, а так же для слежения за искусственными спутниками Земли и любительской радиосвязи через искусственные спутники земли на коллективной радиостанции RW3WWW радиоклуба «СПОРАДИК» Юго-западного технического университета. Комплекс активно используется в работе над проектом «РАДИОСКАФ».
г. Москва
КАЛМЫКОВ Никита Сергеевич
Населенный пункт: г. Москва
Учебное заведение: Средняя общеобразовательная школа 1060
Класс/курс: 9 класс
Направление: Техника и инженерное дело
Многофункциональный робот
В последнее время, вопрос внедрения роботов в повседневную жизнь людей становится все более актуальным. Роботы нужны исследователям, археологам, инвалидам и т.д. На изготовление роботов для каждого типа работ уйдет немало времени, поэтому я решил создать робота, совмещающего в себе как можно большее количество функций. Собрав все необходимые устройства, я создал многофункционального робота способного помогать или даже заменять людей в самых различных ситуациях (рис 1).
Для максимальной универсальности в использовании робота я установил на него электронные и механические устройства позволяющие выполнять самые различные виды работ. Помимо дистанционного управления роботом, возможна так же автоматизация и программирование его действий.
Сейчас, хоть и не много, но роботы уже появляются в виде помощников. В основном роботы активно используются для военных целей, это тяжелые, дорогостоящие и не всегда удобные роботы, по характеристикам редко оправдывающие средства. Мой робот не дорогой, не тяжелый удобный в управлении, перевозке и ремонте. Главное достоинство, отличающее моего робота от других, это отсутствие центра системы (процессора/контроллера). Почему это достоинство? очень частый случай, когда от небольшой ошибки в эксплуатации (подключении, управлении) сгорает центр системы (микроконтроллер/процессор), а поскольку все соединено в один «клубок» (все элементы проходят через центр системы) сгорают и другие уязвимые элементы. При конструировании своего робота я использовал разделенное управление всеми системами, что при отказе одной из систем не мешает работать всем остальным.
Московская область
Сухоцкий Дмитрий Владимирович
Населенный пункт: г. Красноармейск
Учебное заведение: Гимназия №6
Класс/курс: 7 класс
Направление: Техника и инженерное дело
Создание автономного робота на аппаратной вычислительной платформе «Arduino»
В работе описывается создание автономного робота для соревнований «Eurobot 2011» на аппаратной вычислительной платформе «Arduino».
Цель работы: спроектировать и изготовить робота, способного автономно выполнить следующие задачи:
- ориентироваться в зоне площадью 2х 3 метра;
- находить предметы заданной формы и цвета;
- строить и устанавливать в заданной зоне пирамиды из предметов весом до 1,5кг;
- не допускать столкновения с роботом противника.
Методы и приемы, которые использовались в работе:
- изучение литературы и интернет - ресурсов в направлении создания автономных роботов;
- подбор микроконтроллеров, изготовление плат, программирование;
- подбор датчиков цвета и расстояния, замеры параметров, практические исследования;
- модернизация электроприводов для шасси и манипуляторов.
- 3D моделирование и изготовление на 3D принтере деталей робота.
Полученные результаты:
- изготовлен автономный робот в соответствии с требуемыми характеристиками;
- разработанные аппаратно совместимые с «Arduino» модули полностью обеспечивают работу робота;
- изготовленные сервоприводы из мотор - редукторов показали стабильную работу;
- ИК датчики расстояния в сочетании с сервоприводами возможно использовать для сканирования рабочей зоны.
Выводы:
- программирование микроконтроллеров с bootloader (программой - загрузчиком) «Arduino» доступно для начинающих пользователей;
- аппаратно вычислительную платформу «Arduino» можно использовать как в учебных, так и в практических роботах.
Автор разработал учебный курс и ведет занятия со школьниками и студентами в лаборатории Робототехники в ИАЦ ДО г. Москвы. 4 команды приняли участие в программе «Каникулы роботов в Политехническом» и готовятся к соревнованиям «Евробот».
Мурманская область
Пеньков Игорь Олегович
Населенный пункт: г. Мурманск
Учебное заведение: Гимназия №4
Класс/курс: 11 класс
Направление: Математика
Аналог неравенства Серпинского
Актуальность: в двадцать первом веке мы часто сталкиваемся с такими понятиями как среднее арифметическое, среднее геометрическое, и среднее квадратичное, эти понятия применяются в физике, математике, и других вычислительных науках но, к сожалению, мы мало что знаем об их соотношениях и о том, как они связанны между собой.
Цели и задачи исследования:
а). Выяснить, справедливо ли неравенство (1) при
 т.е. выполняется ли неравенство:
т.е. выполняется ли неравенство:  .
.
б). Справедливо ли неравенство
 ,
, 
в). Исследовать неравенство (1) для произвольного
Методы и приемы: перегруппировка слагаемых метод Математической индукции разбитие неравенства на несколько метод сравнения.
Выводы: Полностью доказана задача (A), задача (B), задача (С), удалось получить новую зависимость между средними величинами.
Федулеева Татьяна Александровна
Населенный пункт: г. Мурманск
Учебное заведение: Гимназия №1
Класс/курс: 4 класс
Направление: Вычислительная техника и программное обеспечение
Изучение основ программирования роботов на примере игры
«Крестики-нолики»
Современные роботы разрабатываются командой специалистов, работы ведутся в экспериментальных цехах крупных заводов, корпораций, требуют большого вложения средств. Участвовать в таком процессе можно только после окончания школы и соответствующего института. Но мне хочется создать своего робота уже сейчас. Возможно ли это?
Я решила сделать своего робота и научить его играть в крестики нолики. Это очень простая игра, в ней легкие правила, которые знают все.
Актуальность проблемы: Роботы все больше входят в нашу жизнь и что бы лучше взаимодействовать с ними, необходимо понимать принципы их работы. Мой пример может помочь моим сверстникам поверить в свои силы и начать создавать своих роботов уже сейчас.
Гипотеза: Создать своего робота по силам даже ученику младших классов.
Цель работы: Создать робота – партнера для игры.
Задачи:
1.Узнать больше о роботах
2.Научиться составлять алгоритмы, управляющие работой робота
3.Изучить основы программирования на языке NXT G
4.Собрать действующую модель робота и проверить ее на практике.
Методы исследования:
- Анализ известных моделей роботов.
- Тестирование робота.
- Изучение и анализ литературы, посвященной роботам.
Объект исследования: Самодельные роботы из конструктора Lego Mindstorms.
Выводы:
Результатом проделанной работы является то, что я научилась составлять несложные алгоритмы, использовать в них условия и циклы. Смогла самостоятельно создавать программы на языке NXT-G, задавать команды для движения роботом, выводить изображения на экран, определять состояние сенсоров и т.д.
Узнала много нового о роботах, об их использовании, видах, функции. Просмотрела много других конструкций на основе конструктора Lego Mindstorms.
Простые роботы смогла собрать и запрограммировать самостоятельно, для более сложных конструкций потребовалась помощь родителей.
Цель работы была достигнута, робот для игры в крестики-нолики был создан, и он успешно играет с человеком.