
Волков Глеб Юрьевич систематика и структурно-параметрический синтез механизмов на базе замкнутых систем тел качения специальность: 05. 02. 18 «Теория механизмов и машин» автореферат
| Вид материала | Автореферат |
СодержаниеУровень структурных чисел Уровень структурных формул Уровень анализа реализуемости схем Третья глава |
- Рабочей программы дисциплины Теория механизмов и машин по направлению подготовки 190100, 33.66kb.
- Памятка для студентов группы пкм- по изучению дисциплины " Теория механизмов и машин, 72.92kb.
- Димитрюк Сергей Олегович, доцент кафедры «Теория механизмов и машин» к т. н., доцент, 37.69kb.
- Рабочая программа по дисциплине опд. Ф. 04 Теория механизмов и машин для направления, 252.07kb.
- «Теория машин и механизмов и проектирование текстильных машин», 240.94kb.
- Расчётно-пояснительная записка к курсовому проекту по дисциплине: "Теория механизмов, 22.29kb.
- Учебная программа дисциплины теория механизмов и машин (Наименование дисциплины в соответствии, 241.34kb.
- Примерная программа дисциплины теория механизмов и машин Рекомендуется Минобразованием, 326.52kb.
- Закономерности проектирования механизмов для передачи и преобразования, 19.17kb.
- Задачи кинематического анализа и синтеза механизмов. Передаточные функции и отношения., 55.01kb.
Wр =2∙m – 3 – p4 - L
 -1
-1или (для заменяющей стержневой системы):
Wр =2 ∙М – 3 – S - L
-1.В «зубчатых» ЗСТК Lс = 1 – согласованное вращение всех звеньев, поэтому:
Wр = 3∙(m – 1) – 2∙p5 – L
0.Достаточное условие устойчивости ЗСТК – это параметрическая задача, связанная с анализом решений системы неравенств. При этом важно, чтобы система обладала «запасом устойчивости». В случае «гладких» ЗСТК этот запас выражается в допустимом уменьшении диаметров тел качения (вследствие их износа или упругой деформации).
Заметим, что ранее, в том числе в работах автора, требование, аналогичное условию устойчивости, называлось условием геометрической неизменяемости системы. Действительно, «чистые» ЗСТК с «гладкими» телами качения и фрикционными связями, должны иметь оси звеньев, положение которых относительно некоторой системы отсчета является неизменным. Для них потеря геометрической неизменяемости означает одновременно потерю устойчивости и размыкание кинематических пар. Среди зубчатых ЗСТК существуют «чистые» ЗСТК, расстояния, между осями круглых зубчатых звеньев которых изменяются в процессе работы механизма.
Возможные подходы к поиску структурных решений в области ЗСТК
Предложенный принцип описания ЗСТК позволяет выполнять формализованный структурный синтез механизмов.
Наиболее универсальным является алгоритм структурного синтеза ЗСТК (таблица 1), основанный на комбинировании простейших (базисных) элементов и связей.
В таблице 3, в качестве примера синтеза на первом уровне, показан массив структурных чисел ЗСТК сложностью до 5 элементов, сформированный с учетом структурной симметрии вращения.
Предварительный отбор структурных чисел происходит в соответствии с тестом (см. таблицу 2). Абсолютный запрет на существование ЗСТК накладывает только невозможность контакта кольца с кольцом (п.5) – черный цвет. Структурные числа, не реализуемые в любых «чистых ЗСТК» (п.п. 1,4), отмечены штриховкой. В массивах также указаны структурные числа, которые уже использованы в известных «гладких» (Г), зубчатых (З) или дополненных (Н) системах. Действует правило: структурные числа, осуществимые в варианте (Г), заведомо реализуемы в исполнении (З) и, тем более, (Н).
Таблица 1. Алгоритм структурного синтеза ЗСТК
| № | Выполняемые операции |
| Уровень структурных чисел | |
| 1. | Выбор параметров и формирование массива структурных чисел, соответствующего заданному полю поиска. Устранение изоморфизмов. |
| 2. | Отбраковка вариантов структурных чисел по тесту предварительного отбора (см. таблицу 2). |
| Уровень структурных формул | |
| 3. | Назначение между элементами связей, виды которых соответствуют принятым ограничениям синтеза. Устранение изоморфизмов. |
| 4. | Отбраковка вариантов структурных формул по тесту предварительного отбора (см. таблицу 2). |
| 5. | Проверка вариантов по необходимому условию замкнутости кинематических пар системы с учетом ее линейных вырождений. |
| 6. | Назначение ведущего «()», опорного «[]» и ведомого «{}» элементов ЗСТК (звеньев механизма). |
| Уровень анализа реализуемости схем | |
| 7. | Проверка по достаточному (параметрическому) условию замкнутости кинематических пар. Оценка запаса устойчивости системы. |
| 8. | Неформализованный анализ систем с точки зрения их работоспособности, компактности, технологичности и т.д. |
Таблица 2. Формальные признаки (тест) предварительного отбора ЗСТК

Таблица 3. Массив структурных чисел ЗСТК

В качестве примера синтеза «чистых» ЗСТК на этапе структурных форму возьмем конкретное структурное число «124.14». Связи, разрешенные тестом на уровне БЦС, указаны в таблице 4; результаты оценки структур по W – в таблице 5. Возможные варианты конкретизации функций звеньев в механизме:
для подшипника: [1][2]4.14, [1]24.[1]4, 1[2]4.[1]4.
для передачи: (1)[2]4.{1}4, [1](2)4.{1}4, [1]{2}4.(1)4,
(1){2}4.[1]4, {1}(2)4.[1]4, {1}[2]4.(1)4.
| Таблица 4. Связи, разрешенные тестом (уровень БЦС) | Таблица 5. Результаты оценки структур по W | |||||||||||||||||||||||
|
|
В результате оценки выполнения параметрических условий замкнутости кинематических пар, кинематических, конструктивных и технологических свойств механизмов работоспособными признаны устройства, показанные на рис. 1.5 – 1.8. Из них две схемы имеют новизну на уровне изобретений.
Помимо рассмотренного выше основного алгоритма синтеза ЗСТК «из базисных элементов» в работе применялся структурный синтез новых ЗСТК путем интегрирования модулей (подсистем), присутствующих в известных ЗСТК и рычажных механизмах.
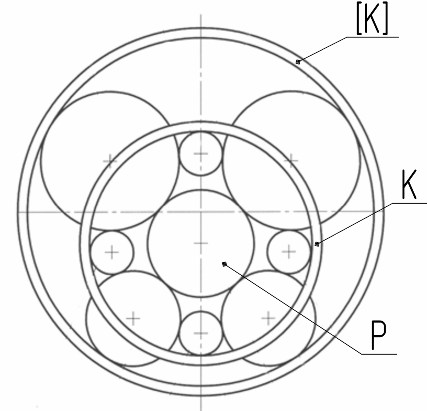 |  |
| [К][Р]Рn × КРn: oor, rrr2 | [К][Р]Рn × КРn: ocr, rrr2 |
| Рис. 1.5. Бессепараторный подшипник (только эксцентриковый) | Рис. 1.6. Бессепараторный подшипник |
 |  |
| | (К)[Р]Рn × {К}Рn: oow, www2 |
| К[Р]Рn × [К]Рn: oow, rww2 | (К){Р}Рn × [К]Рn: oow, www2 |
| Рис.1.7.Зубчатый эксцентриковый подшипник (патент РФ 2341698) | Рис. 1.8. Безводильная передача (патент РФ 2423634) |
Во второй главе разработанный принцип формализованного описания ЗСТК и критерии предварительной оценки их работоспособности использованы при анализе существующих схем и конструкций механизмов.
В ходе патентного поиска обнаружены десятки существенно различных структурных схем ЗСТК и сотни конструкций, соответствующих им механизмов. Наиболее многочисленным оказалось семейство известных структурных схем бессепараторных подшипников с «гладкими» телами качения (см. табл.6). Анализ показал, что большая часть этих схем имеет серьезные недостатки. Встречаются запатентованные конструкции, которые не работоспособны (оценка «–») по достаточному и даже необходимому условиям геометрической неизменяемости. Наиболее удачны решения (оценка «+++»), соответствующие структурному числу «124.124» – по ним запатентованы десятки конструкций.
Эксцентриковых подшипников (ни «гладких», ни зубчатых) в патентно-технической литературе почти нет. Особенно тщательно был проведен поиск фрикционных планетарных передач с самонатяжением в плоском контуре, зубчатых безводильных передач и различных типов передач, сочетающих зубчатые и фрикционные элементы. Интерес представляют схемы насосов, построенные на базе планетарной системы с аномальной подвижностью звеньев.
Таблица 6 – Известные схемы «гладкотельных» бессепараторных подшипников
| Стр. число | Структурная формула | Оценка |
| 12.4 | КР×Рn : rr | +++ |
| 123.4 | КРКn×Рn : rrr2 | + |
| 14.14 | КРn×КРn : оr, rr2 | + |
| 14.24 | КРn×РРn : оr, rr2 | – |
| 123.44 | КРКn ×Рn Рn : rос, оrr2 КРКn × Рn Рn : rrс, оor2 | + ++ |
| 124.14 | КРРn×КРn : ооr, rrr2 КРРn×КРn : осr, rrr2 | – ++ |
| 124.24 | КРРn×РРn : ооr, rrr2 КРРn×РРn : осr, rrr2 | – ++ |
| 124.34 | КРРn×КnРn : оrс, rоr2 | + |
| 124.44 | КРРn×РnРn : rrr2, оrr2 | + |
| 224.14 | РРРn×КРn : соr, rrr2 | + |
| 1233.44 | КРКnКn×РnР2n : rrсr, ооrr | ++ |
| 124.124 | [К]РРn× К(P)Рn : осr, ооr, rrr2 [К](Р)Рn × КPРn : осr, ооr, rrr2 [К](Р)Рn× КPРn : ооr, соr, rrr2 [К](Р)Рn× КPРn : ооr, ооr, rrr2 | ++ +++ +++ – |
| 124.134 | [К](Р)Рn× ККnРn : ооr, оrс, rоr2 | + |
| 124.144 | [К](Р)Рn× КРnРn : ооr, rоr2,оrr2 | – |
| 124.244 | [К](Р)Рn× РРnРn : ооr, rоr2, оrr2 | – |
| 1244.34 | [К](Р)РnРn × КnРn : ооrr, rrr2r2 | + |
| 144.234 | [К]РnРn× (Р)КnРn : оrо,осr2,rr2о | + |
| 1244.124 | [К]Р(Р) Рn × КРРn: ооrо, ооr, rrr2r2 | – |
| 1244.144 | [К]Р(Р)Рn × КРnРn: осоr,rrоr2,ооrr2 | ++ |
Третья глава посвящена синтезу систем с «гладкими» телами качения.
Вначале была поставлена задача синтеза «гладкотельных» структур ЗСТКО (т.е. систем с одной рабочей поверхностью каждого звена) без учета их структурной симметрии и без предопределения функционального назначения. Генерировалась матрица связей и выполнялась оценка реализуемости соответствующей ЗСТКО по тесту предварительного отбора (таблица 2). Две простейшие схемы, прошедшие тест, состояли из 6 элементов (рис.3.1). 7-и элементных схем оказалось 8, но две из них «г, и» не имели параметрической области, удовлетворяющей достаточному условию геометрической неизменяемости. Схемы «б», «ж» оказались известными ранее, остальные – новыми. Преобразователь движения (рис.3.2), построенный по схеме «д», признан изобретением. Достоинством этого механизма является совмещение функций двуплечего кривошипа и редуктора.
| 6 эл. |  |
| ||||||||||||||||||||||
| | а б | |||||||||||||||||||||||
| 7 эл. | 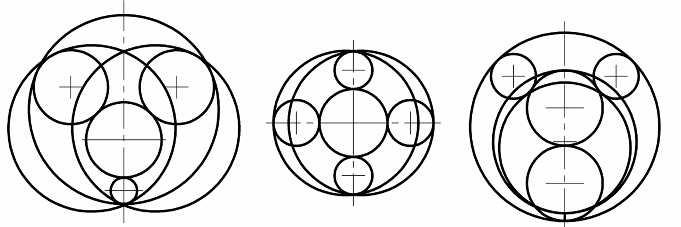 | |||||||||||||||||||||||
| | в д е | |||||||||||||||||||||||
| | 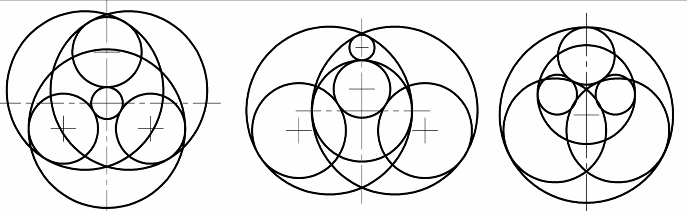 ж з к |