
Спутниковые навигационные системы
| Вид материала | Документы |
СодержаниеРежим TERMINAL Режим APPROACH A2162/09 notamn A769/09 notamn 74 N до широты 60 S |
- Заседание Зал «Большой», 330.26kb.
- Приборы навигации Область исследования, 34.88kb.
- Проект «Навигационные системы, технологии и услуги», 249.93kb.
- И. В. Потуремский, Д. А. Бородавкин, ОАО "Информационные спутниковые системы" им ак., 31.3kb.
- Рабочей программы дисциплины Спутниковые и наземные системы радиосвязи по направлению, 35.36kb.
- Положение о проведении Научно-технической конференции молодых специалистов, 99.67kb.
- Спутниковые системы местоопределения, 329.88kb.
- Роль телекоммуникационных систем связи и передачи данных в современном мире нельзя, 22.06kb.
- Темы конференции: Антенно-фидерные устройства систем спутниковой связи Космические, 24.79kb.
- Цель и тематика конференции, 83.49kb.
Режим EN-ROUTE работает в случае, когда:
– ВС находится за пределами участков маршрута, включенных в SID, STAR, Approach из активного FPL;
– схемы SID, STAR, Approach из базы данных не включены в активный FPL;
– полет выполняется без FPL, а при использовании функции “GO TO ” объект наведения не принадлежит какой-либо точке схем SID, STAR, Approach из базы данных;
– отменен режим TERMINAL и APPROACH по признаку отказа (в результате работы RAIM) или по инициативе пилота.
В режиме EN-ROUTE производится:
– принудительная установка масштаба CDI (HSI) на диапазон, задаваемый пилотом (±5,0; 2,5; 1,0; 0,3 NM), а по умолчанию ± 5,0 NM;
– индикация W, TRK и оставшегося времени полета до пункта наведения;
– автоматическая смена участка маршрута в точке ЛУР, рассчитываемой по фактической путевой скорости, углу разворота и задаваемой пилотом скорости разворота (скорость разворота – “TURN RATE” задается как время разворота на 360°);
– индикация ЛБУ с дискретностью не более 1,0 NM и заданного путевого угла в точку наведения;
– индикация ошибки путевого угла (TAE) с дискретностью 1°;
– индикация оставшегося расстояния до пункта наведения;
– предупреждение о подходе к WPT за время, установленное при предполетных настройках;
– предупреждение о пропадании RAIM или потере навигационной функции;
– решение ряда сервисных, информативных и вспомогательных задач, определяемых мощностью оборудования СНС.
Режим TERMINAL работает в случае, когда:
– ВС находится на схеме SID/STAR, которые включены в активный FPL, или активизированы непосредственно пилотом;
– при отключении режима APPROACH по результатам RAIM или по инициативе пилота;
– на первом и/или на последнем участке маршрута, если активный FPL начинается и/или заканчивается пунктом категории “Apt” и не имеет схем SID и/или STAR.
Примечание. Схемы SID и/или STAR из базы данных можно подключить к FPL только в случае, если маршрут начинается и/или заканчивается пунктом категории “APT”. Если маршрут (FPL) начинается и/или заканчивается точками других категорий (VOR, NDB, Intersection, User), то к такому маршруту невозможно подключить схемы SID и STAR, и поэтому режим TERMINAL не включается.
В режиме TERMINAL производится принудительная установка масштаба CDI (HSI) на диапазон ±1,0 NM, при этом дискретность индикации ЛБУ устанавливается в 0,1 NM.
Для обеспечения процедуры ожидания при нажатии клавиши “HLD” активный FPL отключается и пилоту предлагается установить направление “INBOUND” или “OUTBOUND” (TO/FROM) в зависимости от процедуры входа в зону ожидания, при этом обеспечивается наведение в точку FIX с заданным курсом TO или от точки FIX с заданным путевым углом FROM; после отмены режима HLD обеспечивается возврат к отключенному FPL.
Если в схеме STAR содержится ARC (“ОРБИТА”) с заданным радиусом, то ее выдерживание обеспечивается в режиме нольвождения с представлением информации о текущем ЗПУ для выдерживаний орбиты, TAE, оставшегося расстояния по орбите, прямого ЗПУ и расстояния до конечной точки орбиты, оставшегося времени полета по орбите.
Решение остальных навигационных задач и выдача информации осуществляется как в режиме EN-ROUTE.
Режим APPROACH (для оборудования подклассов А1, В1, В3, С1, С3) работает в случае, когда:
– схема APPROACH (NON-PRECISION) включена в активный FPL или активизирована пилотом. Если в базе данных оборудования СНС нет нужной схемы захода NON-PRECISION, либо срок действия базы данных истек, то включение режима APPROACH блокируется;
– оборудование СНС состыковано с кодирующим высотомером, от которого вместе с барометрической высотой поступает признак исправности и установленное на нем давление. Установленное давление подтверждается пилотом перед включением режима по запросу оборудования. Если от кодирующего высотомера установленное давление не поступает в оборудование СНС, то пилот по запросу оборудования вручную вводит QNH аэродрома посадки. Разница давлений (QNE - QNH) учитывается алгоритмом расчета сферы положения (для навигации или RAIM);
– функция “RAIM-прогноз” определила, что при полете от точки FAF до MAPt будет обеспечена видимость достаточного количества спутников для навигационных определений и работы RAIM;
– имеется санкция пилота на включение режима, которая заключается в подтверждении запроса типа “ENABLE APPROACH?”. Такой запрос оборудование СНС формирует только при соблюдении вышеуказанных условий и только после пересечения радиального удаления 30 NM от аэродрома назначения.
В режиме APPROACH:
– производится автоматическое подключение всех точек выбранной схемы захода на посадку, начиная с IAF до конца схемы MISSED APPROACH в активный план полета (FPL). Если точек IAF в одной схеме несколько, то пилот выбирает нужную точку IAF при первом запросе на включение режима;
– на удалении 3 NM до точки FAF пилоту выдается повторный запрос на подтверждение режима APPROACH. Если при первом запросе (при пересечении радиального удаления 30 NM) подтверждение пилотом не было выполнено, то его необходимо сделать до FAF;
– если подтверждение режима произведено, то на удалении 2 NM до FAF включается режим APPROACH, при этом загорается табло “APR”, масштаб CDI (HSI) уменьшается до диапазона ± 0,3 NM с дискретностью индикации ЛБУ 0,01 NM (18 м);
– на оборудовании СНС, которое в дальнейшем рассчитано для использования при заходе на посадку по категории I, II, III ИКАО в режиме APPROACH реализован алгоритм представления информации об уклонении от посадочного курса в форме “ILS-LIKE”, когда боковое уклонение пересчитывается в угловое уклонение с сужением диапазона CDI с ± 0,3 NM над FAF до ± 0,057 NM (106 м) над торцом ВПП;
– при пересечении точки MAPt аппаратура, независимо от того, продолжается заход на посадку или нет, переходит в режим TERMINAL, устанавливает масштаб CDI в диапазон ± 1.0 NM, гасит табло APR и производит наведение в точку конца процедуры “MISSED APPROACH”;
– при прекращении захода на посадку и выполнении процедуры “MISSED APPROACH” при приближении к точке конца этой процедуры аппаратура принудительно переходит в режим HOLD и предлагает пилоту выставить данные для процедуры ожидания в этой точке.
Отмена режима APPROACH может быть произведена любой задачей, например, полет GO TO, т.е. нажатием любой функциональной клавиши.
Любые особенности режима APPROACH конкретных изделий GNSS содержатся в руководстве по его эксплуатации и не могут здесь быть приведены.
6.4. Использование GPS NOTAM
Перед началом полета с применением GNSS необходимо проконсультироваться о наличии GPS NOTAM. Данный NOTAM издается U.S Coast Guard Station, Washington DC (код ИКАО – KNMH) и может быть запрошен:
– по каналу AFTN по адресу KDZZNAXX с использованием формата: SVC RQ INT LOC=KNMH; или
– по интернету: ссылка скрыта с использованием программы Евроконтроля.
GPS NOTAM бывают двух видов: по аэродрому и по маршруту. По аэродрому GPS NOTAM может быть как для каждого созвездия (GPS и ГЛОНАСС) так и для WAAS.
GPS NOTAM для WAAS издается по району и для конкретного аэродрома.
GPS NOTAM по маршруту издается при полете по организованным трекам в регионе Северной Атлантики.
GPS NOTAM издается по аэродрому на котором опубликована схема захода на посадку с использованием GPS или RNAV(GNSS), если перерыв в получении сигналов от спутников будет более 15 мин.
В качестве примера представлены NOTAM для двух аэропортов.
Аэропорт Тулуза (Франция)
(A2162/09 NOTAMN
Q) LFBB/QGALS/I/NBO/A/000/999/4100N00200E005
A) LFBO B) 0908010200 C) 09080200159
E) BARO AIDED GPS RAIM UNAVBL FOR NPA
0908200448 TIL 0908010455
0908202135 TIL 0908012140).
Основным отличием GPS NOTAM от обычного является информация, представленная в поле Е), в котором указываются периоды времени, когда будет отсутствовать возможность неточного захода на посадку с использованием GNSS, т.е. функция RAIM при условии барометрической поддержки не будет в состоянии анализировать точность определения местоположения ВС (см. п. 6.5).
Аэропорт Carthage (Tunis)
(A769/09 NOTAMN
Q) DTTC/QGALS/I/NBO/A/000/999/3651N01014E030
A) DTTA B) 0908020700 C) 0908030659
E) BARO AIDED RAIM OUTAGES
20/08/09 05:00:00 UNTIL 10:00:00
NON BARO AIDED RAIM OUTAGES
20/08/09 21:30:00 UNTIL 22:45:00)
В данном NOTAM представлено две информации о перерыве в работе RAIM. В период с 05.00.00 – 10.00.00 20 августа 2009 г. будет перерыв в работе RAIM при отсутствии барометрической поддержки. Во втором случае в период с 21.30.00 – 22.45.00 будет перерыв в работе RAIM при наличии барометрической поддержки.
GPS NOTAM издаются для конкретного аэродрома на период прогноза RAIM 24 часа в 07.00 UTС для углов видимости спутников (угол маски) +5º и выше при условии отсутствия работоспособности RAIM не менее 5 мин как для условия использования в приемнике информации о барометрической поддержки так и при ее отсутствии.
При использовании информации сайта ссылка скрыта представляется информация RAIM по указанным аэродромам.
В качестве примера приведена информация для захода на посадку по GPS на аэродромах: UWWW – Курумоч (Самара), USSS – Кольцево (Екатеринбург) и USTR – Рощно (Тюмень) не период 20 – 23 августа 2009, с учетом угла маски +5º для алгоритма выявление и исключение неисправности (FDE – Fault Detection with Exclusion).
Terminal/Approach Check
Generated 20/08/2009 15:27:30 UTC
Scenario Start: 20/08/2009 00:00:00 UTC Scenario Stop: 23/08/2009 00:00:00 UTC
Mask Angle: 5.00. Algorithm Fault Detection with Exclusion (FDE). Mode: Approach
Almanac – Week 521
В соответствии с прогнозом RAIM не обеспечивается в аэропорту:
Курумоч 21 августа 2009 г. в районе 3 часов UTC с барометрической и без барометрической поддержки;
Рощино 22 августа 2009 г. в районе 9 часов UTC с барометрической и без барометрической поддержки;
Кольцево 22 августа 2009 г. в районе 15 часов UTC без барометрической поддержки.
Во время полета пред планированием захода на посадку с использованием GPS необходимо выполнить операцию по уточнению RAIM прогноз.
6.5. Использование функции RAIM
Необходимо заострить внимание, что для полетов о ППП используются датчики СНС стационарные и переносные, которые имеют функцию RAIM.
Основные задачи функции RAIM:
– оценка качества принимаемых сигналов со спутником и выявление спутника, чья информация не должна быть использована (см. рис. 6.5);
– определение порогов срабатывания по точности определения места ВС в зависимости в зависимости от типа операций, см. табл. 6.4.
Рис. 6.5. Оценка качества принимаемых сигналов
На рис. 6.5 графически представлены линии положения от соответствующих номеров спутников. Место ВС определяется пересечением линий положений. В каждой точке пересечения линий положения определяются геодезические координаты (φ, λ) по умолчанию на эллипсоиде WGS-84, если не выбран соответствующий рефференц-эллипсоид. Из рис. 6.5 видно, что координаты, определяемые с использованием линия положения спутника №6, существенно отличается от остальных. В этой связи алгоритм RAIM не будет обрабатывать информацию этого спутника.
Информация от пяти спутников образует 10 пересечений (рис. 6.6), т.е. 10 мест ВС. В дальнейшем компьютере по 10 местам вычисляется значение места ВС:
,
где n количество i мест.
Рис. 6.6. Определение места ВС
В дальнейшем определяется радиус разброса места ВС (R). Значение этого радиуса используется в качестве порога срабатывания RAIM в зависимости от выполняемой операции согласно табл. 6.4.
Таблица 6.4
Пороги срабатывания RAIM
| Этап полета | Значение допуска | |
| км | м. мили | |
| По маршруту | 3.7 | 2.0 |
| В районе аэродрома | 1.9 | 1.0 |
| Заход на посадку | 0.6 | 0.3 |
Необходимо отметить, что в связи с тем навигационные спутники постоянно перемещаются по орбитам, то линии положений всякий раз будут пресекаться под различными углами, т.е. геометрический фактор (PDOP) все время меняется, а, следовательно, значение R является величиной переменной во времени. В этой связи если планируется заход на посадку в режиме зональной навигации с использованием датчика GPS, то выполняется RAIM прогноз перед заходом на посадку.
6.6. Изменение чувствительности индикатора боковых отклонений
В системах RNAV (таковым является оборудование СНС) индикация отклонения от заданной линии пути в поперечном направлении индицируется при помощи вертикальной планки на приборе ПНП (CDI). При этом цена деления шкалы в километрах или морских милях может устанавливаться вручную или автоматически.
При выполнении полетов в районах действия RNAV важное значение имеет правильное использование чувствительности ПНП (CDI), т.е. установка цены деления крайнего отклонения вертикальной планки. Использование завышенной чувствительности влечет к необоснованному реагированию на точное выдерживание линии заданного пути. К примеру, при полете по маршруту в случае установки отклонения вертикальной планки в крайнее положение на 1 км цена одного деления составит 0.2 км. Стремление пилота при ручном пилотировании выдерживать вертикальную планку в центре потребует от него усилий в технике пилотирования. В этой связи целесообразно придерживаться рекомендованных значений установки чувствительности ПНП.
При полете по маршруту рекомендуется устанавливать чувствительность ± 3.7 км (2 м. мили), при этом цена одного деления на шкале ПНП (CDI) будет соответствовать 0.74 км (0.4 м. мили).
При подлете к аэродрому за 56 км (30 м. миль) от контрольной точки аэродрома при включении режима захода на посадку базовый приемник GNSS переключается на чувствительность ПНП (CDI) ± 1.9 км, при этом предел срабатывания сигнализации RAIM устанавливается ± 1.9 км.
По достижении расстояния до FAP 3.7 км предел чувствительности ПНП (CDI) и RAIM плавно меняется и в FAP устанавливается ± 0.6 км, соответствующий заходу на посадку. При этом ВС, по крайне мере за 3.7 км до FAP, должно находиться с посадочным путевым углом и с отклонением от линии пути не более ± 0.6 км.
При уходе на повторный заход после пролета точки MAP чувствительность ПНП (CDI) изменяется автоматически на ± 1.9 км.
7. Базы навигационных данных
Важнейшей особенностью использования СНС является наличие в бортовой аппаратуре компьютерной базы навигационных данных (NAVDATA). База навигационных данных бортовой аппаратуры включает в себя три взаимосвязанных баз данных:
- основная база навигационных данных;
- база пунктов пользователя;
- база маршрутов пользователя (Company route).
Основная база навигационных данных
Основная база навигационных данных охватывает территорию Земного шара от широты 74 N до широты 60 S. За пределами этой территории возможно использование навигационной системы, но необходимо вручную вводить магнитное склонение для правильного вычисления магнитных пеленгов и магнитных путевых углов.
Объем навигационных базы данных и ее содержание незначительно варьируются в зависимости от типа СНС.
База данных создается по регионам согласно рис. 6.7. В тоже время потребитель может заказать базу данных с компонентами, которые ему необходимы
В базу навигационных данных включается информация об навигационных пунктах следующих категорий:
- аэропортах;
- радиомаяках VOR;
- радиомаяках NDB;
- пунктах, не маркированных радиомаяками – INTERSECTION.
В базу навигационных данных включается также информация о процедурах: SID, STAR и Approach.
Основное содержание информации об аэропортах следующее:
- идентификатор;
- наименование;
- ближайший крупный город и государство;
- широта и долгота;
- абсолютная высота;
- частоты каналов связи.
В зависимости от типа бортовой системы может быть также включена следующая дополнительная информация об аэропортах:
- принадлежность (гражданский или военный);
- информация о ВПП (грузонапряженность, превышение, размеры);
- система посадки (светотехнические и радиотехнические средства);
- наличие посадочного радиолокатора;
- зона с особым режимом полетов (если аэропорт находится в пределах такой зоны);
- разница во времени с UTC;
- информация об аэродромном обслуживании (наличие марок топлива и др. сервис).
Кроме того, в некоторых бортовых системах пользователь может внести дополнительную информацию о каждом аэропорте, состоящую, примерно, из 30 знаков.
Основное содержание информации о радиотехнических средствах: VOR, VOR/DME, DME, VORTAC, TACAN, NDB, LCTR, ДПРМ, БПРМ, ОПРС, ОМ, ММ, IM:
- идентификатор;
- наименование;
- государство местонахождения VOR;
- частота;
- наличие радиомаяка DME;
- широта и долгота.
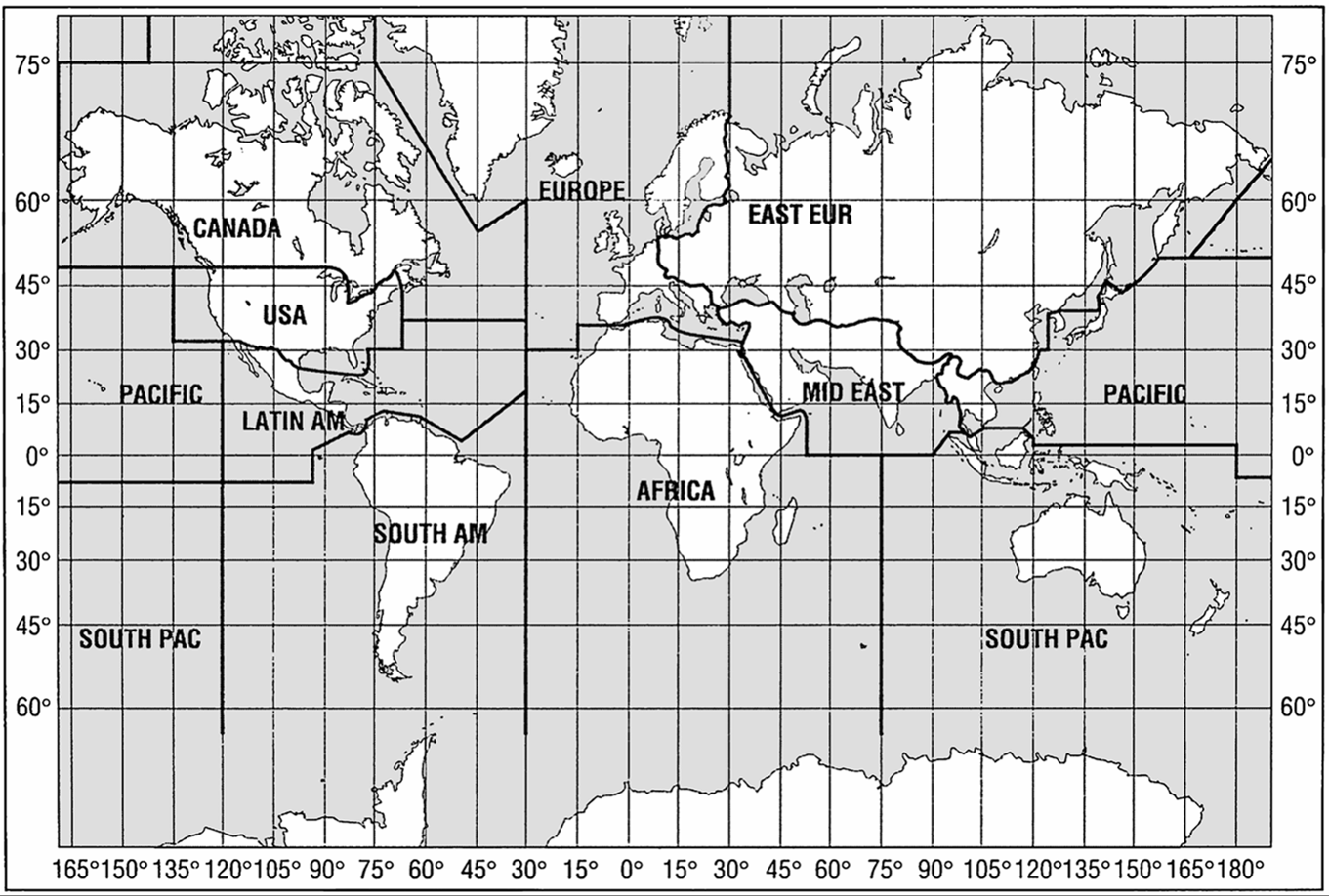
Рис. 7.1. Деление Земного шара на регионы баз данных
Основное содержание информации о пунктах, категории INTERSECTION:
- идентификатор;
- широта и долгота.
Кроме того, для пункта категории INTERSECTION, могут быть указаны: идентификатор контрольной точки, как правило, радиомаяка VOR, а также пеленг и дальность от контрольной точки до данного пункта.
Основное содержание информации о процедурах: SID, STAR, Approach:
- наименование;
- аэропорт;
- пункт перехода;
- соответствующая ВПП;
- контрольные точки процедуры.
В базу навигационных данных, в зависимости от типа навигационной системы, может быть также включена информация:
- о минимальных безопасных высотах;
- о зонах, контролируемых органами ОВД (УВД) и классах воздушного пространства (A, B, C, D, E, F, G);
- о зонах с особым режимом полетов (P, R, D и т. д.);
- частоты средств связи с органами ОВД.
Основная база навигационных данных, обновляется через каждые 28 дней, на территории США – 56 дней. Запрещается выполнять полет по ППП с просроченной базой данных.
База навигационных данных поставляется на магнитных носителях информации: дискеты или в специальные картриджы, вставляемые в блок бортовой навигационной системы. Содержание информации навигационной базы данных не может быть изменено или отредактировано пользователем.
Литература
- Приложение 15 к Конвенции о международной гражданской авиации. Службы аэронавигационной информации. ИКАО, изд. 12. Монреаль, 2004.
- Спутниковые навигационные системы. Методическое пособие. СПб, АГА, НЛМК, 1998.