
Спутниковые навигационные системы
| Вид материала | Документы |
СодержаниеНепреднамеренные помехи Преднамеренные помехи. Атмосферные помехи. Функциональное дополнение GNSS. Спутниковые функциональные дополнения (SBAS). Наземные функциональные дополнения (GBAS) |
- Заседание Зал «Большой», 330.26kb.
- Приборы навигации Область исследования, 34.88kb.
- Проект «Навигационные системы, технологии и услуги», 249.93kb.
- И. В. Потуремский, Д. А. Бородавкин, ОАО "Информационные спутниковые системы" им ак., 31.3kb.
- Рабочей программы дисциплины Спутниковые и наземные системы радиосвязи по направлению, 35.36kb.
- Положение о проведении Научно-технической конференции молодых специалистов, 99.67kb.
- Спутниковые системы местоопределения, 329.88kb.
- Роль телекоммуникационных систем связи и передачи данных в современном мире нельзя, 22.06kb.
- Темы конференции: Антенно-фидерные устройства систем спутниковой связи Космические, 24.79kb.
- Цель и тематика конференции, 83.49kb.
5. Функциональные дополнения
- Дифференциального метода корректировки спутникового сигнала
Опыт эксплуатации СНС показывает, что сигналы, излучаемые навигационными спутниками подвержены различным помехам: непреднамеренные и преднамеренные помехи, а также атмосферные помехи.
Непреднамеренные помехи. Большинство случаев воздействия помех на СНС связано с бортовыми системами, и в результате накопленного в ходе эксплуатации СНС определено несколько источников непреднамеренных помех.
К непреднамеренным помехам искусственного происхождения относятся излучения радиопередатчиков, могущие создать сигналы с нежелательным уровнем мощности в L-диапазоне. Идентифицированные искусственные непреднамеренные помехи, создаются радиолиниями, гармониками телевизионных каналов, сигналами запроса систем ближней навигации, гармониками существующих УКВ радиостанций, спутниковой связной системой GLOBALSTAR, радиолокационными станциями системы управления воздушным движением.
Вероятность появления таких помех зависит от правил государства в области использования спектра и распределения частот, а также обеспечения соблюдения установленных правил в каждом государстве или регионе.
Портативные электронные устройства также могут вызвать помеху СНС и другим навигационным системам.
Преднамеренные помехи. В связи с низкой мощностью сигналов СНС существует возможность их подавления маломощными передатчиками.
Преднамеренная помеха (jamming) – радиопомеха, создаваемая специально сконструированным источником и предназначенная для нарушения функционирования аппаратуры потребителей СПС. К преднамеренным помехам следовало бы также отнести любые действия, направленные на нарушение функционирования СНС, включая атаку на спутники и наземную инфраструктуру управления.
Другим типом преднамеренных помех является радиодезинформация – метод, направленный на то, чтобы заставить приемник СНС осуществить привязку к ложным сигналам, похожим на штатные, и медленно сойти с заданного направления так, чтобы прошел достаточно большой отрезок времени до обнаружения постороннего вмешательства.
Атмосферные помехи. Имеется два ионосферных явления, которые необходимо учитывать: быстрые и значительные изменения состояния ионосферы и сцинтилляция. Изменения состояния ионосферы приводят к ошибкам в определения дальности, которые учитываются при разработке системы.
В условиях действия мощных случайных неблагоприятных факторов: геомагнитных возмущений и всплесков радиоизлучения Солнца возможно как значительное ухудшение определения места ВС так и потеря сигнала СНС от одного или нескольких спутников.
С целью получения более стабильного не искаженного сигнала от навигационных спутников, а также для повышения точности применяются различные типы функциональных дополнений:
- спутниковая система функционального дополнения (SВАS – Satellite-Based Augmentation System);
- наземная система функционального дополнения (GВАS – Ground-Based Augmentation System.
В наземных и спутниковых функциональных дополнениях важное место отводится повышению точности определения места ВС путем дифференциального метода корректировки спутникового сигнала.
Суть дифференциального метода корректировки спутникового сигнала основана на относительном постоянстве значительной части погрешности СНС как во времени, так и в пространстве. Реализация дифференциального метода возможна при наличие двух приемо-индикаторов один из которых находится на земле, а другой – на борту ВС. Геодезические координаты наземного приемоиндикатора (именуемого контрольной станцией) в выбранной системе координат в WGS-84 или ПЗ-90.02 известны с высокой точностью. Точность определения координат контрольной станции должна быть не хуже: по широте и долготе 5 см, по высоте относительно поверхности эллипсоида 0.5 м. Контрольная станция принимает сигналы спутников и определяет текущие координаты, которые в дальнейшем сравниваются с координатами привязки контрольной станции. По результатам сравнения определяются поправки в координаты для данного района и для текущего момента времени. Полученные поправки передаются от радиомаяков потребителям по специальной линии радиосвязи и после их обработки по радиоканалу ОВЧ диапазона в бортовой приемник СНС передаются дифференциальные коррекции, информация о целостности системы и другие служебные сообщения (см. рис. 5.1). Сигналы дифференциальной коррекции от радиомаяков передаются на частотах 283,5-325 кГц. Радиосигналы на этих ссылка скрыта подвержены отражению от земной поверхности. Поэтому ссылка скрыта и горная ссылка скрыта обычно не влияет на приём сигнала.
Рис. 5.1. Дифференциальный метод повышения точности определения места ВС
Дифференциальный режим используется как в наземных, так и в спутниковых функциональных дополнениях. Использование дифференциальных поправок позволяет существенно повысить точность определения места ВС и таким образом использовать СНС для выполнения точного захода на посадку.
В практической деятельности используются локальные и глобальные дифференциальные GNSS.
Локальная дифференциальная GNSS – разновидность дифференциальной GNSS, в которой дифференциальные поправки можно использовать для обеспечения соответствующих этапов полета в пределах ограниченного географического района.
Глобальная дифференциальная GNSS – разновидность дифференциальной GNSS, в которой дифференциальные поправки можно использовать для обеспечения соответствующих этапов полета в пределах целого региона.
5.2. Системы функционального дополнения
Функциональное дополнение GNSS. Метод обеспечения данной системы входной информацией, которая дополняет получаемую путем использования основного(ых) созвездия(й) спутников и позволяет получать дополнительные входные данные о дальностях/псевдодальностях, или ввести поправки в существующие входные данные о псевдодальностях, либо улучшает указанные данные. Это обеспечивает улучшение характеристик системы по сравнению с теми, которые могут быть достигнуты при использовании только основной спутниковой информации.
Системы функционального дополнения включают как спутниковые системы функционального дополнения – ссылка скрыта (SBAS), так и наземные системы функционального дополнения (GBAS).
Принципиальное отличие SВАS и GВАS состоит в способах получения и доставки корректирующей информации, а также зоне действия систем.
SBAS – система функционального дополнения с широкой зоной действия, в которой пользователь принимает дополнительную информацию от передатчика, установленного на спутнике, и является глобальной системой с зоной действия до нескольких тысяч километров.
GBAS – система функционального дополнения, в которой пользователь принимает дополнительную информацию непосредственно от наземного передатчика. GВАS является локальной системой, функционирующей в зоне действия до 50 км. Примером такой системы в России является локальная контрольно-корректирующая станция ЛККСА-А-2000.
Наряду с локальной зоной действия, GBAS могут быть с расширенной зоной действия. Примером такой GBAS является Австралийская наземная региональная система дополнения (GRAS – Ground-based Regional Augmentation), которая охватывает территории Австралии и Новой Зеландии.
Спутниковые функциональные дополнения (SBAS). Система содержит наземные контрольные станции, распределенные на достаточно обширной территории, одной из основных задач которых является выработка корректирующей информации из сигналов спутников и информации о целостности.
Корректирующая информация со всех контрольных станций, информация о целостности навигационных спутников обрабатывается по определенным алгоритмам и в виде сообщения, содержащего широкозонные дифференциальные поправки к сигналам навигационных спутников, информацию о целостности и другую служебную информацию по каналам связи "земля-спутник связи – воздушные суда" передается в бортовые приемники СНС посредством геостационарных спутников. Геостационарный спутник при этом выполняет роль и навигационного, увеличивая количество радиовидимых потребителю навигационных спутников. Примером исполнения SВАS является WААS (Wide Area Augmentation System – Система функционального дополнения с широкой зоной действия) обслуживающая территорию США включая штат Аляска.
Система WAAS создана для достижения возможности использования GPS во всех стадиях полета ВС, включая точный заход на посадку. Система обеспечивает ошибку не более 3 м по горизонтали и 4 м по вертикали в 95% времени. Система состоит из космического и наземного сегментов. Поправки для спутников системы WAAS формируются с помощью развитой сети базовых станций (наземный сегмент WAAS). Спутники, покрывающие своими сигналами территорию США, составляют космический сегмент системы. Сигнал WAAS имеет ту же частоту и схожую структуру с GPS, что облегчает его реализацию в GPS приемниках.
В Европе и Азии на основе WAAS созданы и функционируют аналогичные системы. В Европе EGNOS (European Geostationary Navigation Overlay Service – Европейская широкозонная подсистема спутниковой навигации, в районе Индийского полуострова – GAGAN (GPS Aided Geo Augmented Navigation – GPS дополненная геостационарным спутником для расширения навигации), на Дальнем востоке – MSAS (Multi-Functional Satellite Based Augmentation System – Многофункциональная система дополнения спутникового базирования), принадлежащая Японии, рис. 5.2.
Наземные функциональные дополнения (GBAS) включает наземную подсистему и бортовую подсистему. Наземная подсистема GBAS передает данные и поправки к дальномерным сигналам GNSS посредством ОВЧ-радиовещательной передачи цифровых данных в бортовую подсистему. Наземная подсистема GRAS состоит из одной или нескольких наземных подсистем GBAS.
GBAS выполняет следующие функции:
- обеспечение локальных поправок к псевдодальности;
- обеспечение данных о системе GBAS;
- обеспечение данных для конечного участка точного захода на посадку;
- обеспечение прогнозирования данных об эксплуатационной готовности дальномерного источника;
- обеспечение контроля целостности источников дальномерных измерений СНС.
Система GRAS предназначена для обеспечения операций на маршруте, в районе аэродрома, заходов на посадку, вылетов и заходов на посадку с вертикальным наведением.
GBAS в комбинации с одним или несколькими другими элементами СНС и безотказным приемником СНС отвечает требованиям к системным характеристикам точности, непрерывности, эксплуатационной готовности и целостности для планируемой операции.
Рис. 5.2. Области обслуживания системами функционального дополнения
с широкой зоной действия
В том случае, когда GBAS предназначена для обслуживания только в районе аэродрома, то такая система имеет локальную зону действия и именуется как система функционального дополнения с ограниченной зоной действия (LAAS – Local Area Augmentation System). На рис. 5.3 представлена схема захода на посадку с применением GABAS (GLS).
Зона действия LAAS для обеспечения точных заходов на посадку по категории I или заходов на посадку с вертикальным наведением, является следующей:
- в боковом направлении: начиная с 140 м с каждой стороны от посадочного порога ВПП и расширяющейся под углом 35° с каждой стороны траектории конечного этапа захода на посадку до 28 км и под углом 10° с каждой стороны траектории до 37 км;
- в вертикальной плоскости: в пределах упомянутой боковой зоны выше 7° или 1,75 относительно угла оси глиссады над горизонтом (θ) с началом координат в точке захвата глиссады и 0,45θ выше горизонта или менее вплоть до 0,30θ, такого, который требуется, чтобы поддержать назначенную процедуру захвата глиссады. Эта зона действия используется между 30 м и 3000 м относительной высоты точки приземления.
Примером LAAS может быть локальная контрольно-корректирующая станция ЛККС-А-2000.
На рис. 5.4 представлена рабочая область LAAS при условии расположения передающих антенн в непосредственной близости от ВПП.
Рис. 5.4. Рабочая область LAAS
6. Бортовое оборудование СНС
6.1. Типы оборудования
Существует большое количество модификаций бортового оборудования СНС. На ВС Ил-96, Ту-204/214 и Boeing, Airbus выпуска после 1997 г. оборудование СНС входит в состав навигационного комплекса, а информация отображается на навигационном дисплеи и пульте управления информации (ПУИ). В качестве примера на рис. 6.1 представлена упрощенная схема интеграции датчика GPS в структуре навигационного комплекса типа FMS.
Рис. 6.1. Упрощенная схема интеграции датчика GPS
в структуре навигационного комплекса типа FMS
На воздушном судне, не оборудованном комплексной системой пилотажно-навигационного оборудования (КС ПНО, FMS) или оборудованными навигационными комплексами старого поколения, устанавливается стационарно приемоиндикатор GPS. Существует большое количество моделей разных производителей приемоиндикаторов GPS. На отечественных ВС в соответствии с рекомендациями полномочного органа в области гражданской авиации 1995 г. эксплуатируются приемоиндикаторы GPS указанные в табл. 6.1.
Таблица 6.1
Приемоиндикаторы GPS используемые на отечественных ВС
| Фирма | Тип приемника | Класс по TSO C-129 |
| Allied Signal | KLN 90A | A2 |
| KLN 90B | A1 | |
| KLN-900 | A1 | |
| Garmin | GPS 155 | A1 |
| Trimble Navigation | TNL 2000T | A2 |
| TNL 2000 Approach | A1 | |
| TNL 2000 Approach Plus | A1 | |
| TNL 2100T | A2 | |
| TNL 2101 input/output | A1 |
Начиная с 2000 г. российские производитли начали выпуск оборудования СНС типы, которых представлены в табл. 6.2.
Таблица 6.2
Отечественное оборудование СНС
| Название | Обозначение | Класс по TSO C-129 |
| Спутниковый навигационный приемник | СНС 2 | С1 |
| Авиационная бортовая радиотехническая интегрированная система | АБРИС | А1, В1 |
| Интегрированная инерциально-спутниковая навигационная система | НСИ-2000 НСИ-2000 МТ | А1, В1 В1 |
| Аппаратура потребителей спутниковых навигационных систем ГЛОНАСС/GPS | СН-3301 СН-4312 | А2, С2 |
| Бортовой приемник спутниковой навигации | БПСН-2 | С1 |
| Бортовая многофункциональная система | БМС - индикатор | А1, В1, С1 |
| Пульт-приемоиндикатор спутниковых навигационных систем ГЛОНАСС/GPS | ППИ-2006 | А1, В1, С1 |
| Transas Satellite System | TSS | А1, В1, С1 |
6.2. Информация представляемая СНС
В приемоиндикаторах и КС ПНО (FMS) информация на экранных представляется аббревиатурой на английском языке. В качестве примера на рис. 6.2 представлена информация лицевой панели приемоиндикатора TNL-2000 Approach Plus, а на рис. 6.3 даны две навигационные страницы, индицируемой на пульте управления FMS.
6.2. Лицевая панель TNL-2000 Approach Plus
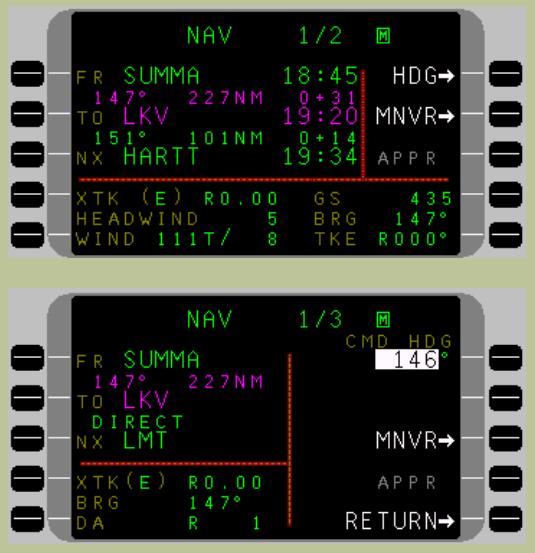
Рис. 6.3. Две навигационные страницы, индицируемые на пульте управления FMS.
Из рис. 6.2 и 6.3 видно, что на для понимания информации необходимо знать аббревиатуру, индицируемую на экранах (см. табл. 6.3).
Таблица 6.3
Аббревиатура, используемая в оборудовании СНС и сообщениях на дисплеях
| AUX | - Auxiliary | - дополнительный; |
| BRG | - Bearing | - пеленг; |
| DA | - Drift Angle | - угол сноса; |
| DR | - Dead Reckoning | - счисление пути (по запомненному ветру при отказе приема сигналов спутников); |
| CALC | - Calculation | - вычисление; |
| DTK | - Desired Track | - заданный путевой угол; |
| DIS | - Distance | - расстояние; |
| ENT | - Entry | - ввод (информации) |
| ETA | - Estimated Time of Arrival | - расчетное время прибытия в заданный пункт; |
| ETE | - Estimated Time Enroute | - расчетное время полета до заданного пункта; |
| GS | - Ground Speed | - путевая скорость; |
| FPL | - Flight Plan | - план полета; |
| FR | - From | - от (пункта); |
| HX | - Next | - следующий (пункт); |
| HDG | - Heading | - курс; |
| HLD | - Holding | - ожидание; |
| MSG | - Message | - сообщение; |
| KT | - Knot | - узел (скорость); |
| NAV | - Navigation | - навигация; |
| L (R) | - Left (Right) | - влево, вправо (уклонение, угол сноса); |
| NRST | - Nearest | - ближайший (пункт); |
| OBS | - Omnidirectional Bearing Selected | - заданное (выбранное) направление (пеленг) выхода на навигационный пункт; |
| PTK | - Parallel Track | - параллельная линия пути; |
| SV |
| - количество спутников (принимаемых); |
| TAS | - True Airspeed | - истинная воздушная скорость; |
| TK, TRK | - Track | - фактический путевой угол; |
| TRN | - Turn | - угол доворота (разность между BRG и TRK); |
| TAE | - Track Angle Error | - "ошибка" в путевом угле (TK-DTK); |
| TO | - To | - на (точку); |
| WPT | - Way Point | - точка пути; |
| XTK | - Cross-Track Error, the Distance of Track | - линейное боковое уклонение от линии заданного пути |
Н
 а рис. 6.4 представлена графическая интерпритация аббревиатур навигационных параметров при полете на участке маршрута.
а рис. 6.4 представлена графическая интерпритация аббревиатур навигационных параметров при полете на участке маршрута.Рис. 6.4. Полет на заданный пункт
6.3. Основные режимы работы приемоиндикаторов СНС
Основные режимы использования приемоиндикаторов СНС следующие:
- включение и инициализация (определение места ВС);
- создание маршрута полета (FPL);
- навигация (NAV) – полет по маршруту – EN-ROUTE;
- выполнение SID, STAR, HOLDING – TERMINAL;
- заход на посадку – NON-PRECISION APPROACH, только оборудование подклассов: А1, В1, В3, С1, С3;
- PRECISION APPROACH при наличии GABS (LAAS).